裝卸料機分離器安全鎖波紋管破損原因分析
2022-07-06 03:34:58胡文凱
設備管理與維修 2022年3期
關鍵詞:設計
章 熙,高 照,胡文凱
(中核核電運行管理有限公司,浙江嘉興 314300)
0 引言
秦三廠重水堆核電廠采用2 臺裝卸料機對反應堆進行不停堆換料,在裝卸料機中安裝有2 臺分離器,主要實現在換料過程中對燃料的分離操作,以實現不停堆換料。裝卸料機分離器的安全鎖應急解鎖機構,是用來確保分離器內部的燃料擋塊在提升或下插狀態下能夠保持當前狀態不改變的一套安全裝置。當因某種原因導致安全鎖不能實現上鎖或解鎖時,即會造成分離器內的燃料擋塊不能通過自動命令下上升或下降,不能完成燃料棒束的分離,進而造成反應堆停堆。而造成安全鎖不能解鎖的原因有多個,其中波紋管破損造成的泄漏,不但會造成反應堆廠房內的蒸汽水平升高引發停堆,同時也會因為燃料擋塊驅動活塞的下插加壓端與波紋管內的聯通而造成重水壓力降低,從而導致活塞兩端差壓降低而不能實現燃料擋塊的提升及下插動作,導致換料過程中斷,一旦出現這種工況將導致非常嚴重的后果。
1 裝卸料機分離器安全鎖機構
分離器安全鎖機構主要功能是確保分離器中燃料擋塊在上升提起和下降插入兩個狀態下保持穩固,避免在意外情況下燃料擋塊突然動作而損傷燃料棒束,其結構如圖1 所示,主要由電磁線圈、電磁吸盤、安全鎖頭、彈簧、撥叉和安全鎖外殼基座組成。其動作原理為:當電磁線圈失電時,安全鎖頭靠彈簧的作用下降鎖頭向外部彈出,直至插入到燃料擋塊的鎖緊槽內,同時由安全鎖頭基座止擋,其行程約0.16 英寸(4 mm),對燃料擋塊實現安全鎖緊;當電磁線圈得電時,電磁吸盤在電磁力的驅動下帶動安全鎖頭克服彈簧的彈力,回撤脫開燃料擋塊鎖緊槽,并由電磁線圈止擋,實現燃料擋塊的安全解鎖,以便燃料擋塊實現其既定的動作功能。
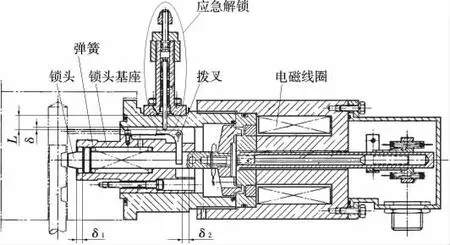
圖1 分離器安全鎖機構
2 分離器安全鎖應急解鎖機構
裝卸料機分離器安全鎖應急解鎖機構的主要功能,是安全鎖在鎖頭發生卡澀或電磁線圈故障等意外情況下不能動作時,通過外部施加力量,強行機械驅動安全鎖內部的撥叉,使其驅動安全鎖頭實現解鎖功能。安全鎖應急解鎖機構的結構如圖2 所示,主要部件由波紋管、波紋管芯桿、波紋管外殼等組成,其中波紋管一端和外殼焊接,另一端和芯桿一端焊接,兩處焊接均為密封焊接,并能夠承受15 MPa 的重水壓力。其動作原理為:當需要執行應急機械解鎖時,由自有的氣動活塞驅動活塞桿軸向頂出,由被壓縮的波紋管帶動芯桿軸向伸出。根據波紋管的設計,可壓縮行程(驅動部分氣缸的設計行程滿足了氣缸的可壓縮安全行程)為0.091 英寸(2.3 mm);根據安全鎖和應急解鎖機構的安裝尺寸設計,解鎖機構芯桿的軸向移動量和安全鎖鎖頭的移動量的比例關系約為1∶2,因此鎖頭的設計最大移動量為0.182英寸(4.62 mm),能夠滿足安全鎖解鎖的設計行程。
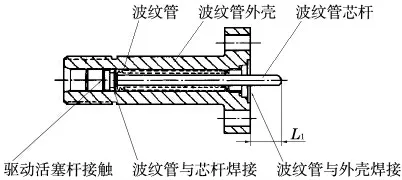
圖2 安全鎖應急解鎖機構
3 安全鎖應急解鎖機構波紋管破損原因分析
3.1 現狀調查
秦三廠目前裝卸料機共計有12 臺分離器,發生波紋管破損導致泄漏4 次,即發現的4 個波紋管都在裝卸料機服役期間,測量破損狀態下的芯桿L1長度如表1 所示。調查中發現每臺分離器安全鎖撥叉上端面到應急解鎖芯桿端頭都沒有直接接觸,且都存在一定間隙δ,如圖1 所示,測量δ 的數據如表2 所示。
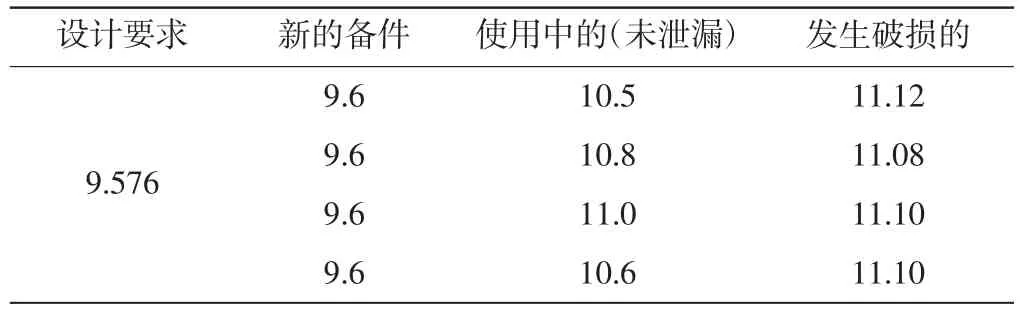
表1 波紋管芯桿長度 mm
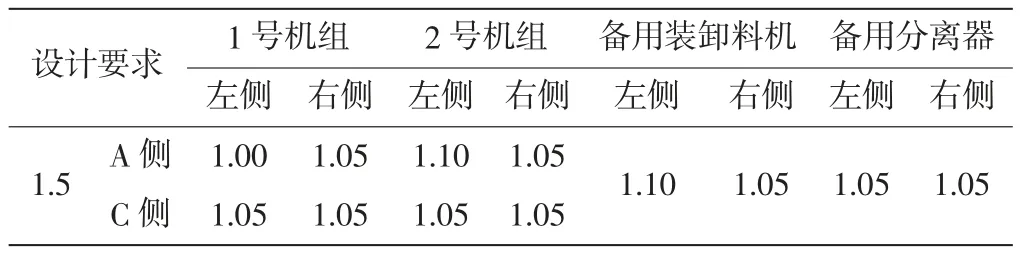
表2 波紋管芯桿和撥叉之間的間隙 mm
查詢分離器應急解鎖機構波紋管組件設計手冊,波紋管的設計最大可壓縮長度為0.091 英寸(2.3 mm);當需要對分離器安全鎖進行應急解鎖操作時,可通過手動遠程驅動氣缸操作,將波紋管壓縮一定深度,即波紋管內部的芯桿將向下伸出并頂住安全鎖的撥叉杠桿上端板。通過設計計算,如果要實現安全鎖的安全解鎖功能,安全鎖的鎖頭需要在軸向移動4 mm;通過杠桿原理及三角形法則可知,安全鎖撥叉上端板需要向下偏轉并在豎直方向位移約為2 mm,如此則需要波紋管芯桿向下移動插入2 mm+δ mm。而波紋管的設計可壓縮量僅為2.3 mm,取現場實際尺寸δ=1.05 mm,則在確保安全鎖能夠完全解鎖時,需要波紋管芯桿的實際向下插入深度為2+1.05=3.05 mm,超過最大允許壓縮量的32%,從而不能確保波紋管的安全壓力邊界的完整性,存在裝卸料機在高壓泄漏的安全風險,異常工況下可導致反應堆停堆及反應堆廠房內氚水平升高。
3.2 當前做法
由于分離器安全鎖應急解鎖波紋管組件機構或安全鎖機構存在設計缺陷,且波紋管組件的最初設計并非是針對重水堆裝卸料機分離器安全鎖設計的,因此沒有進行過專門的匹配性設計,導致當波紋管組件安裝到安全鎖組件上時,其芯桿端頭和撥叉上端板端面產生了間隙而沒有直接接觸。當波紋管組件在動作時,其芯桿要先完成該間隙的移動,之后才開始接觸撥叉并轉換為安全鎖頭的軸向移動。因此為了消除該間隙,目前采用在初始設定安全鎖的時候,采用提前將波紋管組件芯桿下壓,消除該無用間隙,實現波紋管一旦開始動作時,其芯桿將直接驅動撥叉組件而將安全鎖頭軸向解鎖。
3.3 當前做法的不足
由于波紋管組件在進行初始設定時,提前壓縮了波紋管組件,而波紋管的實際允許可壓縮量只有2.33 mm,因此在正常運行期間,該波紋管處于允許使用壓力范圍,系統處于安全狀態;當一旦出現應急情況需要進行手動遠程操作應急解鎖機構進行解鎖時,波紋管實際需要的動作行程仍會超過允許安全可壓縮量,因此該方式仍只能是異常工況下的應急操作,并存在泄漏風險和當波紋管一旦因為過壓縮導致破損而引起大量泄漏的隱患,此時不但不能實現解鎖功能,還增加了泄漏風險以及停堆風險。安全鎖內部部分組件如圖3 所示。
3.4 理論計算
(1)波紋管組件的芯桿伸出長度尺寸為:L1=0.377 英寸=9.6 mm(圖2 中L1)。
(2)波紋管組件底部距離撥叉上端板端面的距離為:L=11.10 mm(圖1 中L)。
(3)根據圖1 及圖3 所示可知:L=a-b-c=11.10 mm。
(4)波紋管芯桿端頭到撥叉上端面的間隙為:δ=L-L1=1.524 mm。
(5)安全鎖頭在實現安全解鎖功能時需要的軸向移動量為:δ1=0.16 英寸=4.06 mm。
(6)根據圖1 中波紋管芯桿和撥叉接觸點的位置計算,以及撥叉豎直段和鎖頭組件銷子直接接觸的位置計算可知,當撥叉沿豎直方向向下移動位移e,則撥叉沿轉軸銷子逆時針旋轉一定角度z,使得撥叉豎直方向也發生同樣角度z 的旋轉,并產生水平方向的位移量f。根據圖3 所示可知,波紋管芯桿到銷子轉軸中心的距離為a,豎直方向撥叉和安全鎖頭驅動銷子的接觸點到撥叉銷軸中心距離為b,當撥叉沿豎直方向移動e 時,其安全鎖頭在其驅動銷子的作用下沿軸向移動距離f,sinz=e/a=f/b,如圖4 所示。
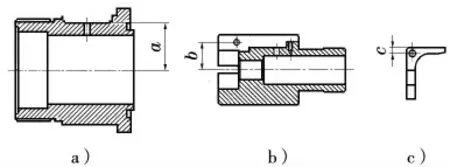
圖3 安全鎖內部組件
(7)結合圖3、圖4 可知:a=0.37 英寸=9.398 mm。
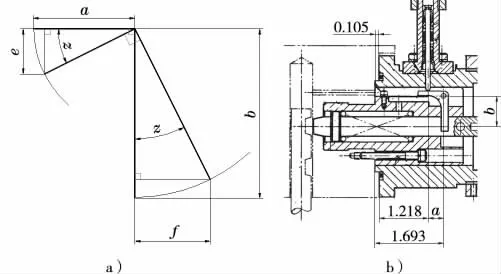
圖4 分離器撥叉偏轉驅動
(8)由圖3 可知:b=0.75 英寸=19.05 mm。
(9)根據安全鎖頭軸向移動的最低安全距離:δ1=f=0.16 英寸=4.06 mm。
(10)再由e/a=f/b 可知:e=0.078 93 英寸=2.005 mm。
(11)根據應急解鎖機構實現功能的過程及原理可知,波紋管實際需要可壓縮的徑向位移為,L=δ+e=0.138 9 英寸=3.529 mm,而波紋管的設計最大可壓縮行為0.091 英寸(2.3 mm),超過了設計最大安全值的52.67%。
根據以上設計理論計算可知,當分離器安全鎖在異常工況下需要進行應急解鎖時,通過遠程驅動氣缸來壓縮波紋管組件芯桿,將會使得波紋管過壓縮超過理論安全設計的52.67%,存在波紋管破損導致泄漏的安全風險,甚至會導致反應堆停堆風險。
4 解決方案
根據安全鎖內部撥叉的機構,可通過增加撥叉上部橫板的厚度,并增加其上部和波紋管接觸區域厚度,確保鎖增加的厚度能夠補償δ 的間隙,同時考慮在撥叉上增加厚度的位置和形狀尺寸對撥叉自身的影響。
5 結論
通過以上分析,當裝卸料機分離器在異常工況下需要進行安全鎖應急解鎖時,通過人為遠程控制氣缸驅動應急解鎖機構對安全鎖進行解鎖,由于波紋管設計最大安全可壓縮行程小于實際解鎖需要的可壓縮行程,因此存在一定的安全風險。針對該設計缺陷,本文提出了三種解決方案來消除該風險,目前正在通過外部單位進行波紋管的重新設計,調整波紋管的可壓縮行程,以滿足現場實際的安全需要。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
