虹鱒(Oncorhynchus mykiss)魚體水動力學特性研究
2022-07-07 02:53:04閆文彥黃六一李玉巖鄔騫力尤鑫星
漁業現代化 2022年3期
閆文彥,黃六一,李玉巖,王 剛,鄔騫力,尤鑫星
(中國海洋大學水產學院,青島 266003)
魚類在游動過程中與流體產生非常復雜的相互作用[1]。魚類會借助側線等器官感覺周圍流體的變化,通過身體的自主擺動克服水流作用,以保持合適的魚體姿態和游泳速度[2-7]。在此過程中魚會消耗大量的能量,從而對其生存和生長產生重要影響[8-9]。研究魚體的水動力學特性,對了解魚類與水域環境的適應性、個體行為和集群特性、養殖技術和裝備開發以及仿生學具有重要的意義。
目前國內外學者對于魚體自身的肌肉運動、推進機理、游泳能力等方面開展較為豐富研究。Walters等[10]探究了鯖科魚類的身體形態和游泳性能;周仕杰等[11]對幾種幼魚曲線游泳能力進行了比較研究;Altringham等[12]研究了在模擬游泳條件下肌肉力量的體外輸出模式;Liao等[13]比較了虹鱒在不同直徑圓柱體后方的游泳狀態和在自由水流中的游泳狀態,發現魚類可以從環境產生的漩渦中獲取能量,以維持其原有的位置;Liao等[14]從能量的角度解釋了采用卡門步態游泳的鱒魚的神經肌肉控制;Lauder等[15-16]分析了魚類游泳的幾種波動推進的經典模式;喬曉冬等[17]分析了魚類游動時反卡門渦街的形成和魚體推力的產生機理,結果表明,反卡門渦街的形成是魚體游動時產生推力的根本原因;周澍欣等[18]針對鯉魚的三維模型進行了數值模擬計算,對其水阻力情況、流場流速分布和壓力分布情況進行分析;Michele等[19]通過模擬肌肉功能來重現魚體游泳的主要特征,比較了不同游泳步態的性能,得到了頻率、波長、尾振幅等關鍵參數與所達到的游泳速度或產生的推力之間的關系,從而獲得其游泳性能;田曉潔等[20]針對仿金槍魚三維模型的流場受力進行對比研究,得到仿生機器魚可有效減少其水阻力,從而提高推進效率;王猛等[21]從亞科層面對中國鯉科魚類游泳能力進行了分析和總結;李明昊等[22]構建了仿生虎鯨直行和轉彎運動負載可靠性分析的狀態函數,分析了仿生虎鯨的尾鰭設計變量對載荷的影響。之前大多數研究重點關注的是不同魚類的游泳模式與推進效率關系,為相關仿生學裝備設計提供服務。隨著野生漁業資源的衰退,人類通過養殖魚類,獲取高質量蛋白質,已成為漁業的重要產業模式。養殖魚類自身的水動力特性與養殖水域的流速、能量消耗和養殖效率以及養殖技術和裝備設計密切相關,而目前針對魚體自身的水動力學特性的研究較少。
虹鱒呈紡錘狀,體略側扁,因其肉質蛋白含量高、膽固醇含量極低,具有很高的食用價值、保健價值及可期的市場前景[23-25],已成為中國水產養殖的重要品種之一,是黃海冷水團深遠海大型鋼結構網箱主要冷水魚養殖品種之一。
本研究以虹鱒為研究對象,依據其魚體特征參數構建虹鱒三維模型,使用數值模擬方法探究虹鱒在不同流速和沖角下的水動力特性、流場流速分布以及魚體表面壓力分布,并通過水槽試驗驗證。研究結果可為虹鱒的個體和群體行為、養殖水域的選擇、養殖技術和裝備開發以及仿生學研究提供參考。
1 材料與方法
1.1 虹鱒模型
預試驗發現小體長單個虹鱒模型在水流作用下的受力很小,儀器測量誤差對結果會產生較大影響。本研究選取大規格虹鱒(全長為84.22 cm,標準體長78.00 cm,體質量6.80 kg),全長和體質量參考《中國鮭鱒魚養殖》[26];體長、體高、頭長、體寬之間的關系參考李思忠等[27]對虹鱒的研究結果進行換算;除尾鰭外,其他部位魚鰭厚度較小,3D打印較難實現,參照相關研究[20],忽略其他魚鰭。模型基本參數見表1。
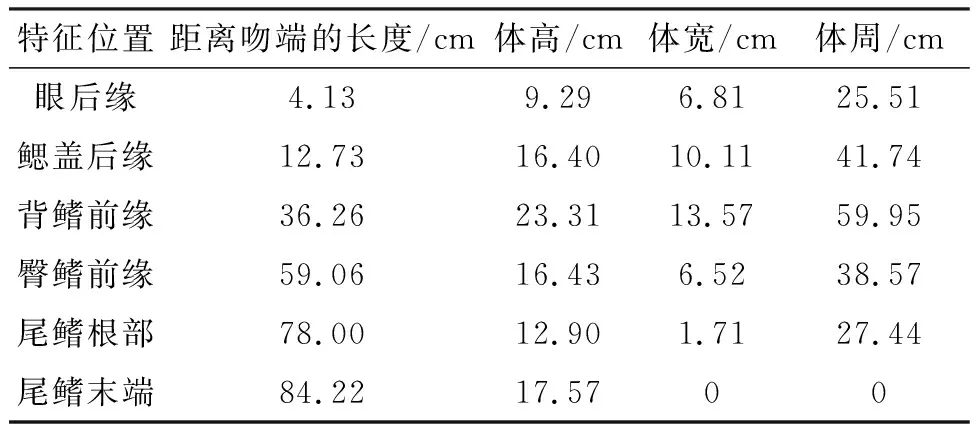
表1 虹鱒魚模型基本參數Tab.1 Basic parameters of rainbow trout model
使用SolidWorks軟件構建1∶1的虹鱒魚體數值模型(圖1a),利用3D打印制作物理模型(圖1b)。3D打印材料選擇1.75 mm的聚乳酸(PLA),打印精度為層高0.1 mm,壁厚1.0 mm。

圖1 虹鱒模型示意圖Fig.1 Schematic of rainbow trout model
1.2 模型試驗
1.2.1 儀器設備
模型試驗在中國海洋大學循環動力水槽中進行,水槽觀察段尺寸為4.0 m × 1.0 m × 1.2 m;利用小威龍vectrino點式流速儀測定試驗流速,量程0~2 m/s,精度± 0.5%;穩定流速范圍0.2~0.7 m/s;通過六分力儀傳感器測量試驗過程中魚體受到的水動力,量程0~50 kg,精度± 0.3%。
1.2.2 試驗布設
試驗布設如圖2所示,X方向沿水流方向,Y方向與水槽側壁垂直,Z軸垂直向上;通過兩根細螺紋桿(直徑d=10 mm)將虹鱒模型固定在六分力儀上,六分力儀處于觀察段中部,魚體中心線(吻端A尾鰭中心B的連線)距水面28 cm。魚體頭部的朝向-X方向。試驗水溫為20℃。魚體中心線所在的水平面為魚體中心平面,作為后續研究流場分布的參考面。
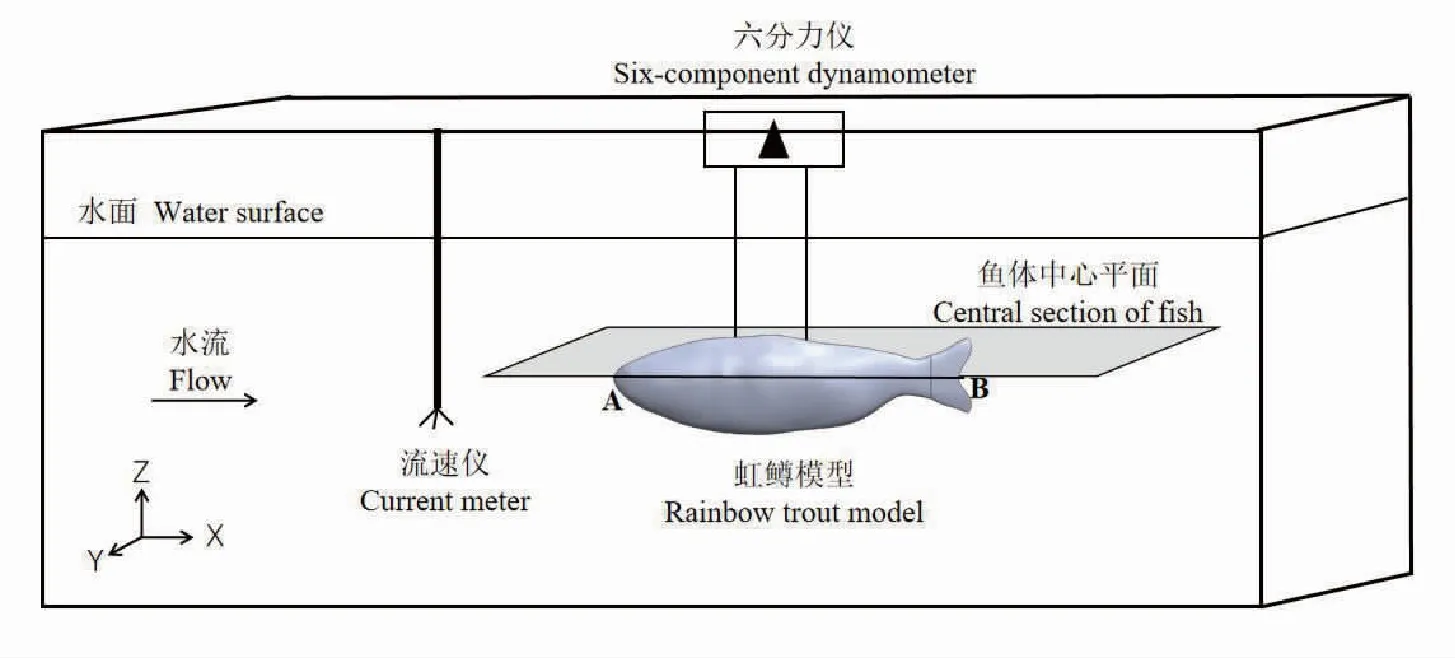
圖2 試驗布設圖Fig.2 Experimental layout diagram
1.3 數值模擬
1.3.1 湍流模型
對于復雜幾何的外部流動的問題,常采用基于雷諾平均N-S(RANS)方程組的k-ε模型。其控制方程為:
(1)
(2)
式中:Ui表示i方向的濾波速度;uj表示j方向的濾波速度;P表示濾波壓力;ρ表示流體密度。
本研究使用Realizablek-ε模型,可以在雷諾應力上保持與真實湍流的一致[28,29]。Realizablek-ε模型優化了湍流粘度公式,從渦量擾動量均方根的精確輸運方程推導出ε方程。
Realizablek-ε模型的湍動能及其耗散率輸運方程為:
(3)
(4)

在上述方程中,Gk表示由于平均速度梯度引起的湍動能產生,Gb是由浮力產生的紊流動能;ym可壓速湍流脈動膨脹對總的耗散率的影響。C2和C1ε是常數,σk,σε分別是湍動能及其耗散率的湍流普朗特數,在 Fluent中,作為默認值常數,C1ε=1.44,C2=1.9,σk=1.0,σε=1.2。
1.3.2 計算域和邊界條件
本研究使用的計算軟件為ANSYS 2021版中的Fluent模塊。計算域與試驗水槽觀察段尺度一致,設置為長度L=4.0 m、寬度W=1.2 m、高度H=1.0 m。虹鱒魚模型在計算域中的布設位置與模型試驗的布設相同。
流體選為20℃下等溫不可壓縮水流,利用壓力-速度分離求解器(Semi-Implicit Method for Pressure Linked Equations-Consistent,SIMPLEC)開展穩態計算。重力加速度為9.8 m/s2。計算域左側為速度入口邊界條件,右側為壓力出口邊界條件,其余為對稱壁面邊界條件(圖3),確保計算域側面邊界不會對魚體水動力分布產生無關干擾。N-S方程(式2)的對流項和擴散項在空間上的離散利用二階迎風格式。收斂標準設置為1×10-4,迭代計算步數為1 000步。
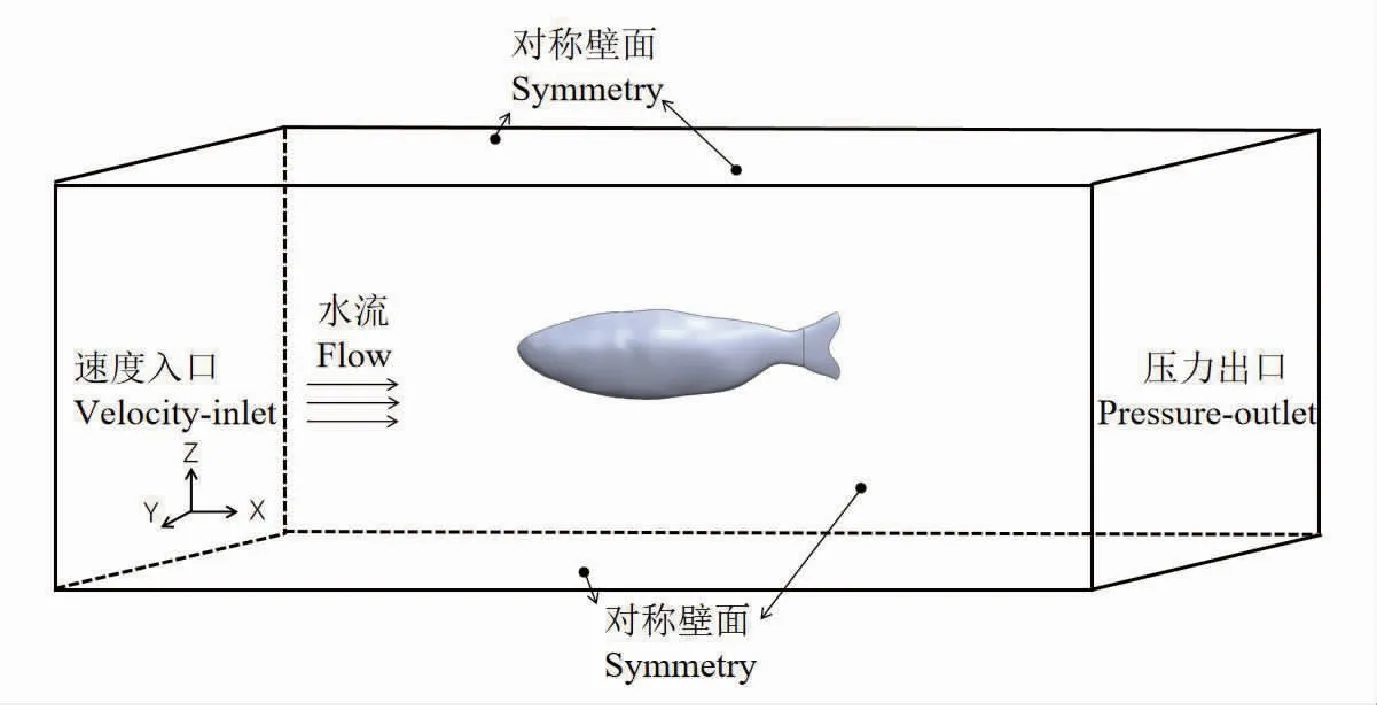
圖3 計算域及邊界條件Fig.3 Calculation domain and boundary condition
作為數值計算中的重要環節,網格的質量直接影響模擬結果的準確性。一般在數值仿真計算中采用的網格包括結構化網格和非結構化網格,非結構化網格具有網格生成速度快、質量好、數據結構簡單等優點。本研究采用的非結構化網格以六面體單元為主,利用Poly-Hexcore網格劃分方法(圖4),在魚體邊緣使用多面體網格與六面體網格實現共節點連接,以達到提升求解效率與精度的目的[30-33]。考慮到計算精度和計算資源的平衡,本研究劃分了5種網格進行網格無關性檢驗[34-36]。圖5表示0°沖角下0.4 m/s時魚體阻力系數隨著網格數的變化。由圖5可知,當網格數量達到314萬后,隨著網格數量的增加,阻力系數基本保持不變。綜合考慮目前計算機能力和計算精度要求,計算中保證網格數量大于314萬,根據不同的計算工況,實際使用的網格數量均處于400~500萬之間。
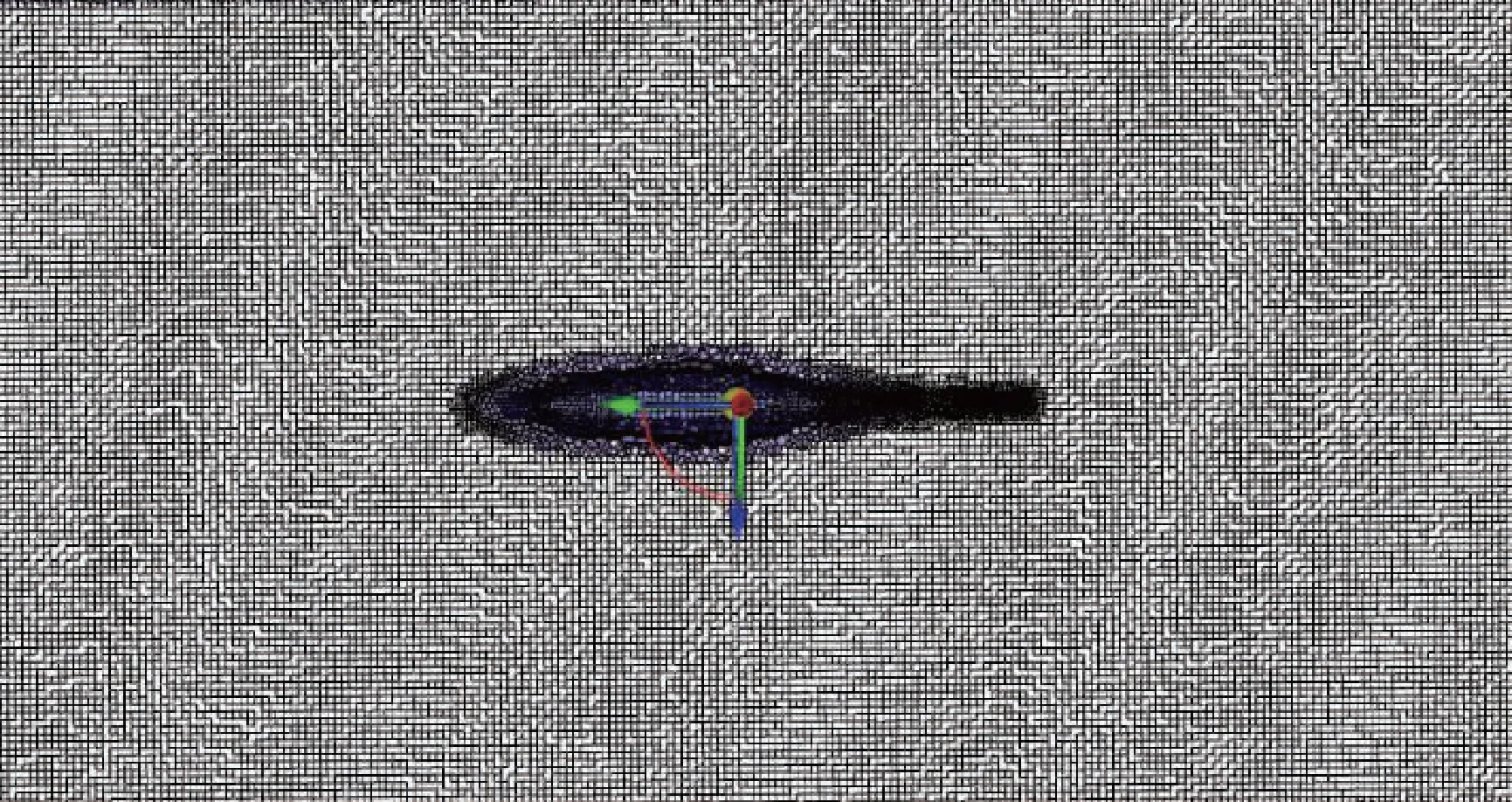
圖4 網格示意圖Fig.4 Overview of the grids
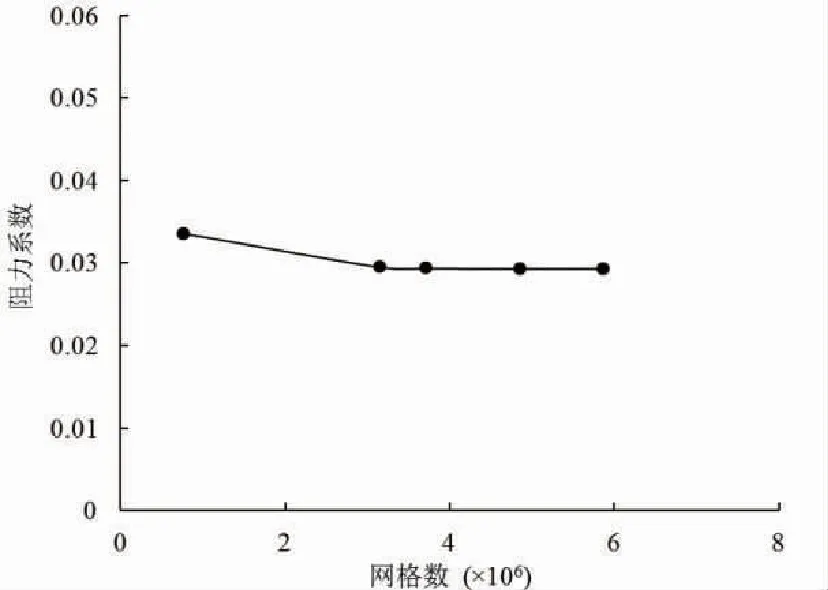
圖5 網格無關性驗證Fig.5 Mesh independence verification
1.4 工況設置
根據虹鱒的游泳速度、黃海冷水團常規流速以及水槽穩定流速范圍,選取試驗流速為0.2~0.7 m/s,以0.1 m/s為間隔。沖角設定為來流方向與魚體中心線所在的縱向中剖面的水平夾角。將5條體長約19 cm的虹鱒放在水槽中試驗,從水槽頂部拍攝的圖像,獲取虹鱒在水流中投影線與來流方向的最大夾角為41.8°(圖6)。數值模擬時的沖角范圍據此設置為0°~45°范圍,以5°為間隔。

圖6 虹鱒游動過程中魚體與水流的沖角Fig.6 The attack angle between the fish body andthe current during the swimming of therainbow trout
在水槽中保持魚體沖角15°,測定不同來流速度下的魚體所受水阻力,與數值模擬結果進行對比驗證。在數值模擬驗證時,為方便對照,將水槽試驗固定模型的2根螺紋細桿一并設置在數值模型中,以減少誤差。在數值方法得到驗證基礎上,利用數值模擬方法開展所有工況的計算。
1.5 數據處理方法
魚體的阻力系數、側向力系數和雷諾數計算公式如下:
(5)
(6)
(7)
式中:Fx—水阻力,N;Fy—側向力,N;Cx—阻力系數;Cy—側向力系數;Re—雷諾數;ρ—水介質密度,取998.3 kg/m3;S—受流面積(魚體沿體長方向的中心截面),m2;U—入流速度,m/s;d—特征長度(體長),m;v—水的運動黏性系數(20℃水的運動黏性系數為1.006×10-6m2/s)。
對監測點速度無量綱處理,計算公式如下:
(8)
式中:K—速度比;Ui—速度場中任意點的速度;U—來流速度。
2 結果分析
2.1數值模擬與水槽試驗結果驗證
圖7為15°沖角時虹鱒魚體水阻力實驗值與數值模擬結果的對比。由圖7可以看出,模型試驗和數值模擬得到的阻力曲線趨勢一致,均呈冪函數關系。在流速0.2~0.6 m/s時較為接近,流速0.4 m/s時相對誤差為2.56%,0.7 m/s時,相對誤差為14.02%。由此表明,本文采用的數值模擬方法具有較高的計算精度,能夠滿足后續的研究要求。
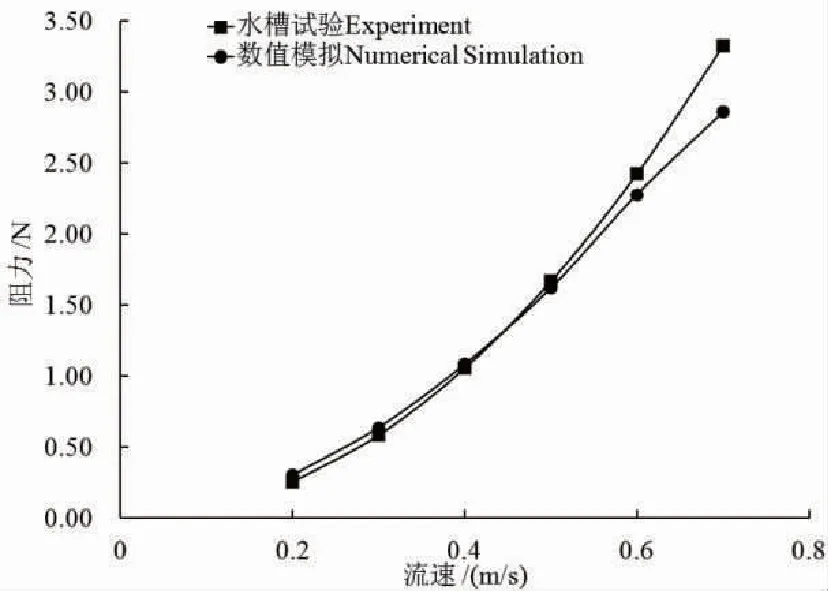
圖7 15°沖角時虹鱒魚體水阻力實驗值 與數值模擬結果的對比Fig.7 Comparison of experimental and numerical resultson drag of rainbow trout at 15°
2.2 魚體水動力特性
2.2.1 水動力系數
魚體的阻力系數、側向力系數與雷諾數關系如圖8和圖9所示。不同沖角條件下,阻力系數Cx和側向力系數Cy隨著雷諾數增大基本保持不變。表明雷諾數在1.6×105~5.8×105區間時,同一沖角條件下,水動力系數處于“自動模型區”。
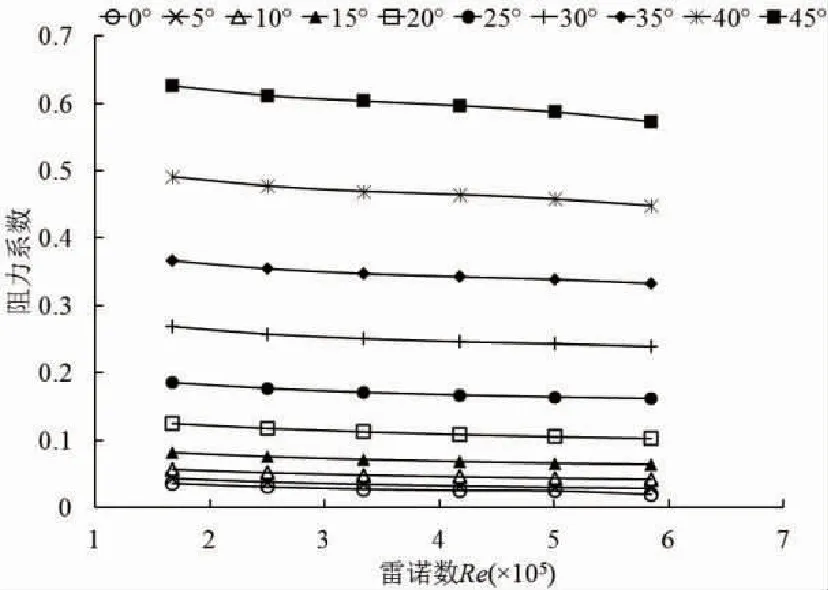
圖8 阻力系數Cx與雷諾數Re的變化關系Fig.8 Relationship between drag coefficient and Reynolds number
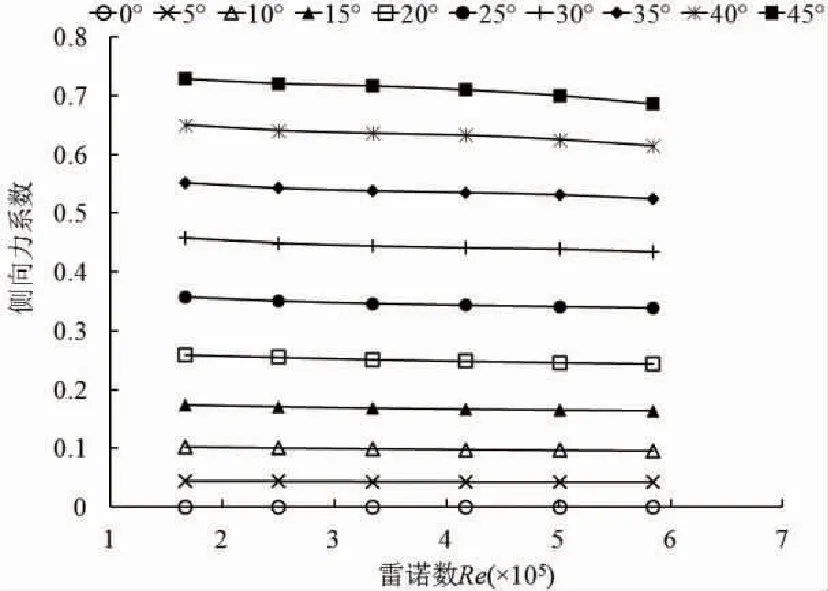
圖9 側向力系數Cy與雷諾數Re的變化關系Fig.9 Relationship between side force coefficientand Reynolds number
由于在試驗范圍內,在同一沖角條件下,阻力系數和側向力系數基本不變,采用阻力系數和側向力系數平均值得到圖10為阻力系數和側向力系數與沖角關系曲線。由圖可知,在0°~45°沖角范圍內,阻力系數Cx隨著沖角(α)增大呈現指數增長趨勢,其關系式為Cx=0.025 2 e0.073 1α(R2=0.994 6);側向力系數Cy隨著沖角(α)的增大而呈現線性增長,其關系式為Cy=0.015α(R2=0.977 8)。
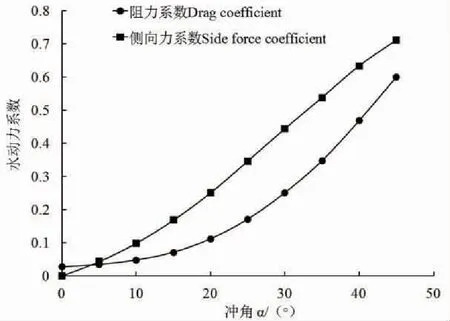
圖10 水動力系數與沖角的關系Fig.10 Relationship between hydrodynamic coefficientand inclinations
2.2.2 魚體周圍速度場特性
本研究取吻端與尾叉最深點連線所在的水平面為參考面(見圖2,魚體中心平面),探究該平面上的速度分布。將魚體周圍流速大于來流速度(無量綱流速大于1)的區域定義為高流速區,低于來流流速(無量綱流速小于1)的區域定義為低流速區。圖11顯示了20°沖角時不同流速下魚體中心平面周圍無量綱流速分布。
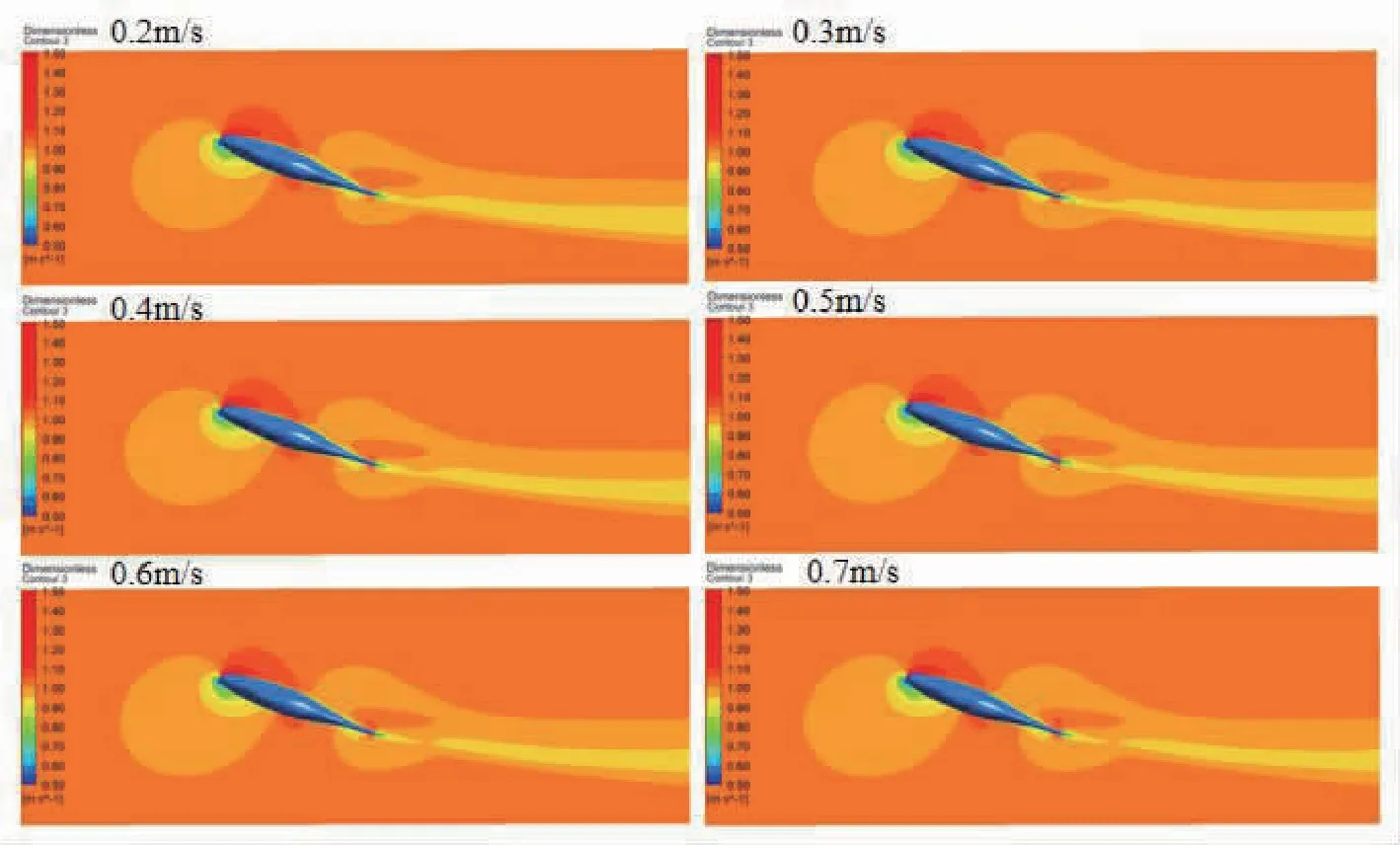
圖11 20°沖角時不同流速下魚體中心平面周圍流場圖Fig.11 Velocity fields around the fish center plane at different velocities at 20°
由圖可知,當沖角固定時,不同流速下高流速區和低流速區分布趨勢基本一致,因此,下文以0.6 m/s為例說明由于沖角的變化而引起的速度場變化情況。
不同沖角、流速0.6 m/s時,魚體中心平面周圍流場分布如圖12所示。由圖12可知,在0°沖角時,魚體左右兩側流速對稱分布,在魚體最寬處流速最大,形成兩側的高流速區;頭部吻端和尾部附近流場流速較小,在頭部前端形成圓形的低流速區,沿尾柄形成長條形低流速區。在沖角0°~15°時,迎流面高流速區出現于魚體最寬處到魚尾之間,說明沖角和魚體結構曲率對表面的流速分布具有協同影響。隨著沖角的逐漸增大,魚體背流面的高流速區逐漸向頭部前端移動,迎流面高流速區呈現逐漸縮小的趨勢,在0°沖角時,迎流面高流速區占魚體中心平面面積的2.30%,當沖角達到15°時,迎流面高流速區面積比例下降至1.14%。當沖角大于15°時,背流面高流速區形態在魚體頭部穩定后,魚體尾鰭兩側開始逐漸形成影響范圍較小的高流速區,隨著沖角的增大而增大,并沿著背流面逐漸從尾鰭尖端向軀干移動。這可能是由于邊界層在魚體頭部的背流面附近產生分離之后,魚體最寬處到魚尾之間曲率的變化導致了局部高流速區的產生。當沖角達30°時,迎流面高流速區消失。在沖角0°~45°時,迎流面低流速區隨著沖角增大而逐漸擴大,并由魚體前部吻端位置向后擴散,尾部迎流面低流速區隨著沖角增大而前移,最終低流速區覆蓋整個迎流面。周澍欣等[18]對鯉魚的三維模型進行了數值模擬探究,其流場結果與本研究一致,符合紡錘形魚體周圍流場的實際情況。

圖12 不同沖角下魚體中心平面周圍流場分布圖Fig.12 Velocity fields around the fish center plane with varying inclinations
2.2.3 魚體表面壓力分布
流速0.6 m/s,不同沖角條件下,魚體表面壓力分布如圖13所示。0°沖角時,由于對稱于來流方向,魚體迎流面和背流面的壓力分布一致,負壓集中在體寬最大處。負壓是由于魚體的特定體型造成的結果,這與上節中流體流經魚體體寬最大處時,兩側區域形成高流速區的結果相吻合,也與田曉潔等[20]對仿金槍魚的研究結果一致。
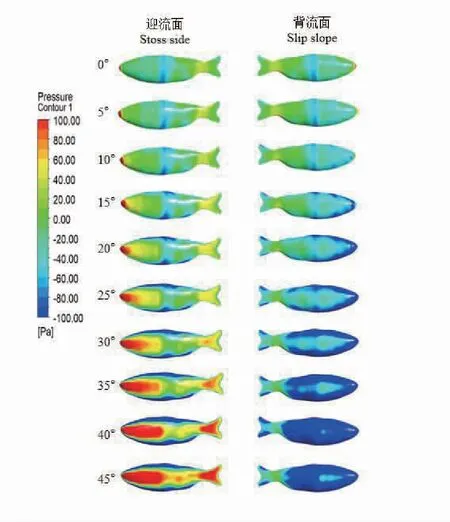
圖13 不同沖角條件下魚體表面壓力分布云圖Fig.13 Surface pressure distribution nephogram offish with varying inclinations
魚體迎流面正壓區在沖角小于20°時,主要集中在頭部和尾部,當沖角大于20°時,迎流面正壓區逐漸貫穿至整個軀干側面。隨著沖角的增大,迎流面上的負壓區域逐漸減少,負壓區逐漸向背、腹方向偏移。迎流面上的正壓區隨著沖角的增大逐漸增大,沖角0°時,正壓區占迎流面的23.90%,當沖角達到45°時,迎流面的71.66%均為正壓區。在沖角0°~20°時,魚體最寬處到魚尾之間由于其曲率的變化,壓力幅值逐漸減小,而上文中迎流面高流速區同樣出現于魚體最寬處到魚尾之間,這說明魚體表面的速度分布和壓力分布息息相關,符合伯努利原理。
魚體背流面正壓區在沖角小于10°時,只存在于魚體頭部和尾柄部位,正壓區在魚體背流面的占比大于16.89%,當沖角大于10°時,頭部正壓區消失,尾柄部位正壓區隨著沖角的增大而減小,但在任意沖角條件下均為正壓,這也可以通過對照尾端速度的分布得到印證,當沖角達到45°時,背流面上正壓區僅有1.35%。魚體背流面負壓區在0°到15°沖角范圍內,隨著沖角的增加從最大體周處開始向頭部擴散,當沖角大于15°時,魚從魚體頭部開始,以魚體標準體長(L)為基準,提取魚體中心平面上的體表不同位置(0.1 L、0.25 L、0.5 L、0.75 L和0.9 L)的壓力數據(圖14和圖15),分析迎流面和背流面上魚體表面的壓力變化規律。由圖可知,隨著沖角的增大,迎流面表面壓力整體上均呈上升趨勢;從魚體位置角度分析,0.25 L之前(魚體頭部)以及0.9 L位置(尾柄),在所有沖角條件下,表面壓力整體上處于正壓力作用,其中,0.1 L處表面壓力均為最大,說明魚體頭部受到的表面壓力最大,最大壓力出現在沖角30°時,最大值約為194.22 Pa;從沖角的角度分析,沖角25°~45°,各個部位壓力均為正壓,除尾柄位置外,各位置壓力基本上隨著沖角的增加而增加,與圖13中的壓力分布云圖相一致。背流面表面壓力整體上隨著沖角的增加呈線性下降趨勢;沖角30°之后,各個部位表面壓力均為負壓,其中,頭部的壓力變化最大,由0°沖角的正壓102.31 Pa,下降至負壓-345.91 Pa。所有沖角條件下,0.9 L位置(尾柄)的壓力在0 Pa附近,變化不大,與圖13的壓力云圖相吻合。
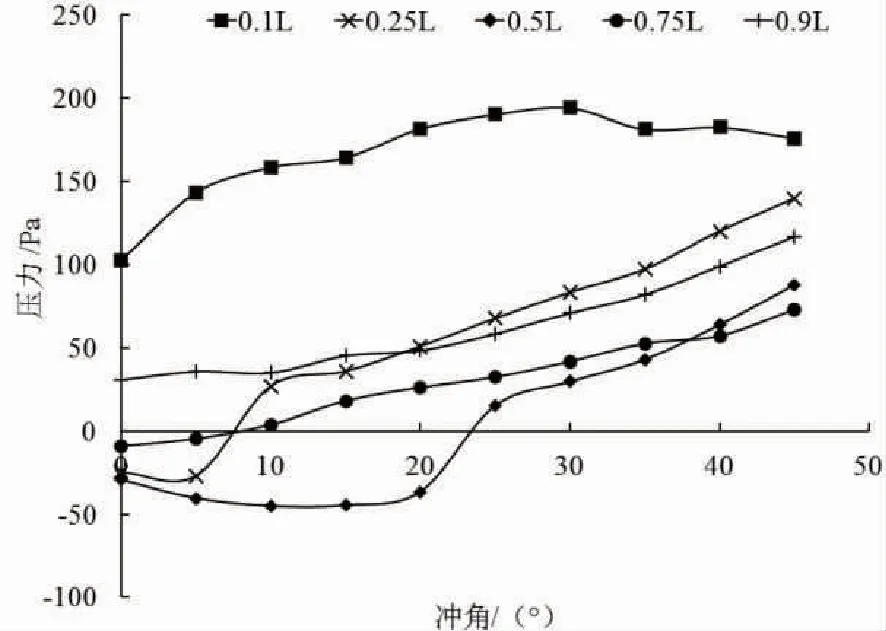
圖14 迎流面魚體不同部位的壓力變化Fig.14 The pressure in different parts of the fish bodychanges with varying inclinations in stoss side

圖15 背流面魚體不同部位的壓力變化Fig.15 The pressure in different parts of the fish bodychanges with varying inclinations in slip slope
3 結論
本研究依據虹鱒魚體特征參數,構建虹鱒魚三維模型,在數值模擬和水槽試驗驗證的基礎上,利用數值模擬方法探究了虹鱒個體在不同流況下的水動力特性、魚體中心平面周圍速度場分布以及魚體表面壓力分布情況。在試驗流速(0.2~0.7 m/s)范圍內,處于同一沖角條件下時,魚體水動力系數均處于自動模型區范圍內;在0°~45°沖角范圍內阻力系數Cx隨著沖角增大從0.027增大至0.599,呈現指數增長趨勢,側向力系數Cy隨著沖角的增大而呈現線性增長,最大達到了0.71;由于虹鱒魚體本身的體型特征,隨著沖角的增大,速度場中高流速區和低流速區呈現一定的移動規律,隨著沖角的增大,魚體迎流面高流速區呈現逐漸后移并縮小的趨勢,背流面的高流速區逐漸向頭部前端移動,背流面高流速區形態在魚體頭部穩定后,魚體尾鰭兩側開始逐漸形成影響范圍較小的高流速區,隨著沖角的增大而增大,并沿著背流面逐漸從尾鰭尖端向軀干移動,說明沖角和魚體結構曲率對魚體周圍的流速分布具有協同影響;魚體結構與表面的壓力分布密切相關,對于魚體的迎流面而言,表面壓力在不同位置上整體呈上升趨勢,其中魚體頭部受壓最大(最大值可達194.22 Pa);對于背流面而言,背流面表面壓力整體上隨著沖角的增加呈線性下降趨勢,其中,頭部的壓力變化最大(102.31~-345.91 Pa)。以沖角的變化替代魚體的擺動,忽略魚鰭對魚體水動力學特性可能帶來的影響,此外魚體表面不同位置壓力分布和變化規律與魚體形狀密切相關,需要在今后開展更為深入的研究。
□