基于改進型Smith預估控制器在安鋼加熱爐溫度控制中的應用
2022-07-11 04:32:00宋強喬冠博
中國設備工程 2022年12期
宋強,喬冠博
(1.安陽工學院機械工程學院,河南 安陽 455000,;2.中山大學數學學院,廣東 中山 528406)
傳統的控制方式已經不能滿足,需要做出改革,便有了溫度與流量兩方面的結合構成了大時滯的爐溫控制系統,溫度用來將測煙氣熱值,流量查看余氧的剩余量,兩方面達到氣體和空氣的優化調節。這種比例對于爐子的高效燃燒控制和較快反應控制得到了良好實現。在純滯后這一流程中并不能良好發揮,控制量由于控制通道的純滯后對產生的干擾做不到及時反饋。使這一階段會出現明顯的過沖,也同時延長了調節它的時間。因此,想取得控制效果的完美產生的難度是很高的。傳統意義上來說,滯后過程是建立在純滯后τ和過程時間T的比值上的,界限值為0.5,大于0.5就很高了。相位滯后和過沖的增大,嚴重過沖這些問題都會在T比率增大時出現。對于滯后時間的控制依然需求廣大研究者所著手聯合開發。
1 加熱爐串級控制模型
此類系統是存在雙控制器的,能使兩條回路快速作業,主子變量分別為爐溫值與小滯后流量。控制質量的改良與爐溫和流量的串級控制密切相關,從而大大降低工業成本。控制閥則被二級控制器控制的,但與此同時,后者又是被主控制器是的輸出控制的。因此在此系統中,受控對象是有兩方的,也就是主次對象,換而言之即溫度和交通對象。顯然控制參數也是有兩方的,即溫度與流量這雙方。作為主控參是溫度。主控參發出的信號被主控器接收到,輔控參信號這一測量值又會被次控器接收。同理會有兩個閉合回路,即主次級回路也就是通常叫法上的內外回路(圖1)。
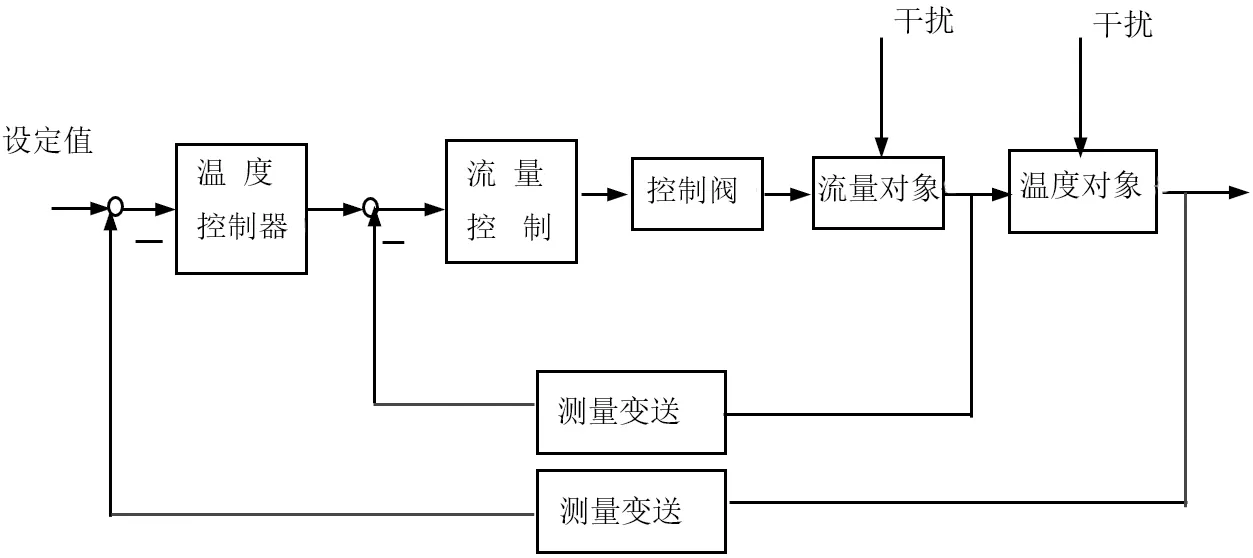
圖1 加熱爐溫度串級控制系統結構方框圖
它的工作過程其實是在一定干擾下主變量與輔助變量的預定值遠離,其二者可以抗除擾動也使系統獲得新的穩態。
2 改進型Smith預估控制器補償方案
PID調節器其實也就是史米斯預測補償控制的源動力,不斷的信號發送到補償器里。補償器與過程的特征是息息相關的,在過程的數學模型和實際過程特征這兩者是存在一定誤差,因此,缺點時間越長,模型的誤差也會越大。意思就是,敏感性在工藝特性變化時也會出乎意料的高。增益自適應預估補償控制是可以抵制這個缺點的出現的。
圖2所示便是上述方案的框圖。一個除法器、一個領先的差分鏈路和一個乘法器在史密斯中得到增加。預測器的輸出乘以導數鏈路的輸出,這一操作必須先于前乘法器在將其輸出到調節器發生,將乘法器在將其輸出到調節器之前Td=τ,將預測器的輸出乘以導數鏈路的輸出。模型的輸出信號與過程之間的比率是決定三條鏈路的功能的,預測器的增益則是通過這種手段自動校正。

圖2 增益自適應補償方案
由圖2所得:


若τ=τm,則有:

由以上分析可知,增益自適應補償器在改善控制性能方面具有與Smith史米斯補償器相同的效果。
3 MATLAB仿真
在現實中非理論情況下,干擾有高有低,通常干擾是很大的,這對系統的穩定性則是很不利的。系統過沖增高,系統的調節時間變更久,不穩定的系統出現,故而這一研究是很有必要的。看此設計能否滿足要求,在兩個控制系統上去仿真這類干擾,便可知此法是否可行。仿真結果如圖3和圖4所示。
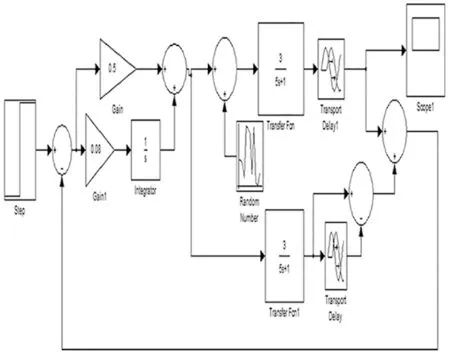
圖3 Simulink框圖

圖4 加入擾動時Smith控制器響應圖
要想達到控制效果上的完美,該系統若是受到了擾動,則做法不成功,從圖3和圖4中可顯出,振蕩和過沖在一定程度上還是不小的,穩態在過許久后,重穩的狀態才會出現。
從圖5和圖6展示圖像可知,當史米斯補償控制系統和改進的Smith補償控制系統增加干擾時,前者去抵制時間擾動并不是沒有把握的,后者不存在超調這一情況。30s可使優化完成的Smith補償控制系統重回穩定值,對干擾有很好的抑制作用。

圖5 Simulink圖
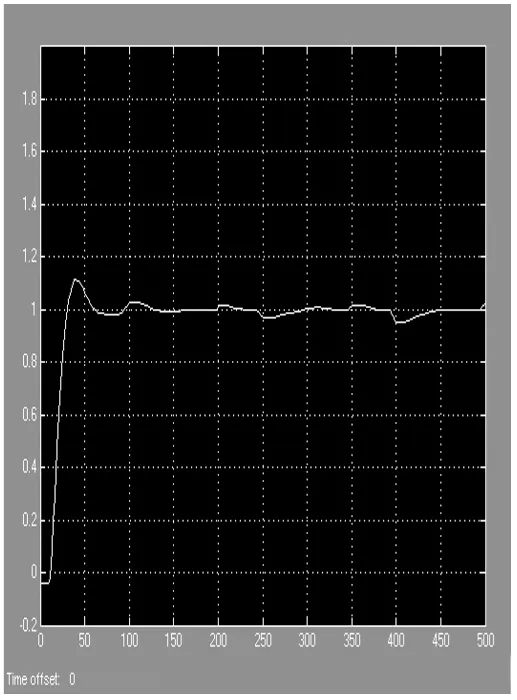
圖6 加入擾動時改進型Smith控制器響應圖
綜上,本文提出了一種Smith預估控制器的使用方案,并進行了仿真,仿真結果良好有效。