基于改進(jìn)RLS算法的鋰電池模型參數(shù)識(shí)別與SOC估計(jì)
2022-07-11 13:14:52董策勇
關(guān)鍵詞:模型
董策勇
(安徽理工大學(xué) 電氣與信息工程學(xué)院,安徽 淮南 232001)
0 引言
能源危機(jī)和環(huán)境污染是當(dāng)今世界面臨的兩大難題.為了應(yīng)對(duì)這些問(wèn)題,新能源技術(shù)受到了人類的廣泛關(guān)注.在這樣的背景下,新能源汽車得到了政府的支持和大力推廣[1].然而,電池技術(shù)成為了限制新能源汽車發(fā)展的關(guān)鍵因素[2].鋰離子電池具有高能量密度,更安全和更穩(wěn)定等優(yōu)點(diǎn)被應(yīng)用在新能源汽車當(dāng)中[3].對(duì)電池的荷電狀態(tài)(Stata-of-Charge, SOC)的準(zhǔn)確估計(jì)是鋰電池技術(shù)中的重要一部分.近年來(lái),卡爾曼濾波算法(KF)被廣泛應(yīng)用在鋰電池SOC估計(jì)當(dāng)中,也取得了不錯(cuò)的效果[4].使用KF算法估算鋰電池SOC時(shí),需要比較精確的等效模型和比較穩(wěn)定的噪聲,但是現(xiàn)實(shí)情況下這些條件卻很難滿足,長(zhǎng)時(shí)間下來(lái)SOC估計(jì)會(huì)出現(xiàn)較大誤差.自適應(yīng)擴(kuò)展卡爾曼濾波(AEKF)算法是基于卡爾曼濾波(KF)算法的改進(jìn),它能夠自適應(yīng)更新過(guò)程噪聲和測(cè)量噪聲,從而獲得更高的SOC估計(jì)精度[5].所以,本文基于二階RC等效電路模型的基礎(chǔ)上,采用自適應(yīng)擴(kuò)展卡爾曼濾波算法(AEKF)對(duì)鋰電池SOC進(jìn)行估計(jì).
遞推最小二乘算法(RLS)在電池模型參數(shù)識(shí)別中應(yīng)用最廣泛.RLS算法中遺忘因子的取值決定了鋰電池SOC估計(jì)的精度,而且不同電池工況下的最優(yōu)遺忘因子取值又不相同[6].所以,為了提高算法的自適應(yīng)性,本文采用帶可變遺忘因子的最小二乘法(VFFRLS)算法與AEKF算法相結(jié)合對(duì)鋰電池SOC進(jìn)行估計(jì)[7].
1 電池等效模型
電池等效模型的選擇是參數(shù)識(shí)別和鋰電池SOC估計(jì)的重要一步.近年來(lái),多種電路等效模型被提出,一階RC模型、二階RC模型[8]、PNGV模型及GNL模[9]等.本文采用如圖1所示的二階RC模型.
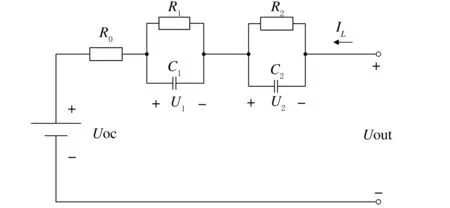
圖1 二階RC等效電路模型
相較其他等效模型更能滿足鋰電池內(nèi)部參數(shù)的時(shí)變特性且SOC估計(jì)精度更高.在滿足極化電容、極化電阻特性的同時(shí),模型的復(fù)雜程度又控制在合理范圍內(nèi).
圖1中,Uoc為開(kāi)路電壓,R0為歐姆內(nèi)阻,R1和R2分別表示電化學(xué)極化電阻和濃差極化電阻,C1和C2分別表示電化學(xué)極化電容和濃差極化電容,Uout為鋰電池端電壓,IL為電池干路電流.該模型的數(shù)學(xué)表達(dá)式為

(1)
為驗(yàn)證二階RC模型的可靠性,采用MATLAB/SIMULINK軟件搭建二階RC模型結(jié)構(gòu),采用HPPC循環(huán)工況數(shù)據(jù)進(jìn)行模型精度驗(yàn)證.將HPPC工況的電流作為模型輸入信號(hào),輸出模型的端電壓仿真值,最后與HPPC放電試驗(yàn)下測(cè)得的端電壓真實(shí)值進(jìn)行對(duì)比,對(duì)比結(jié)果如圖2所示,端電壓誤差如圖3所示.
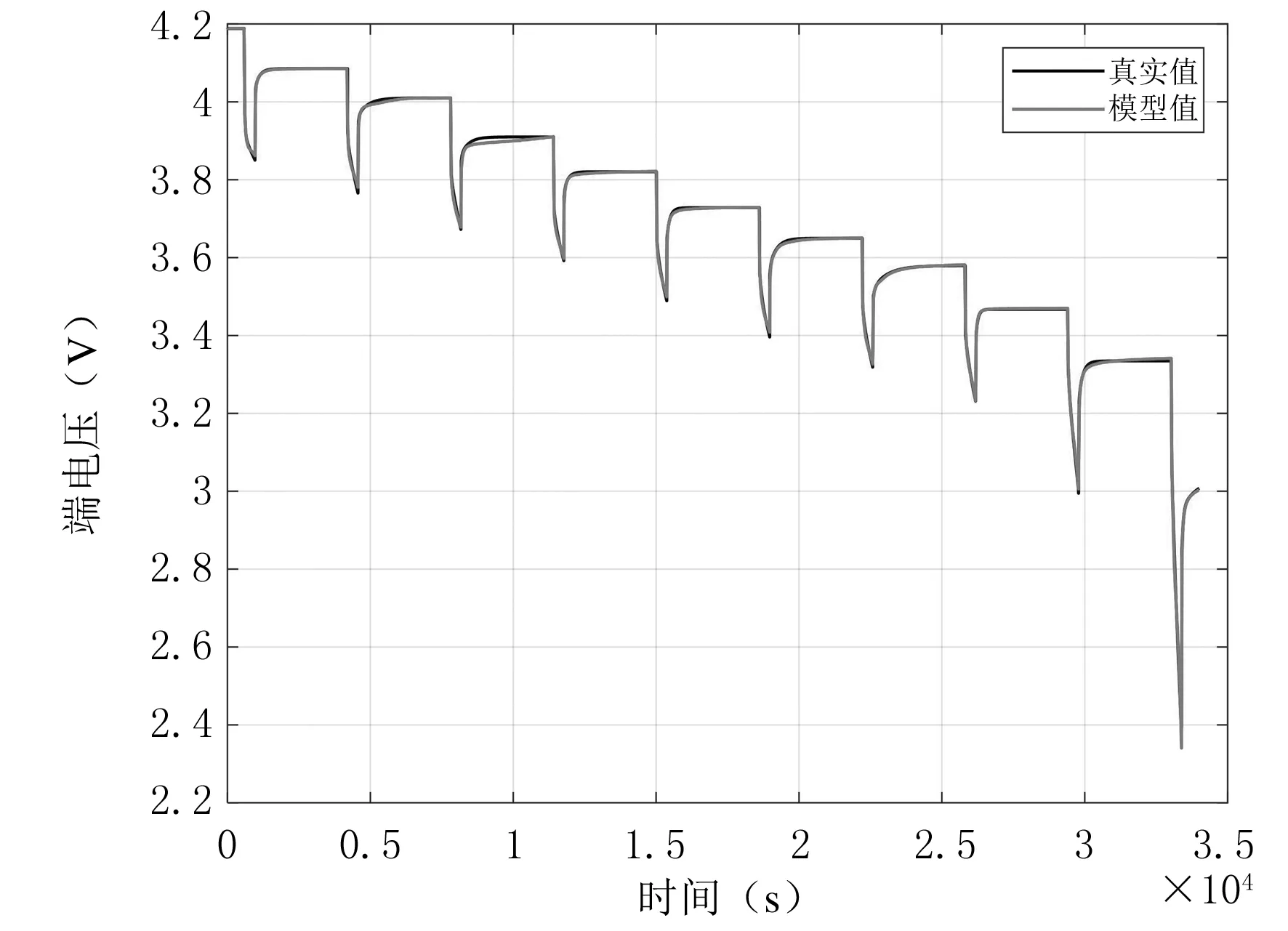
圖2 HPPC放電工況端電壓對(duì)比
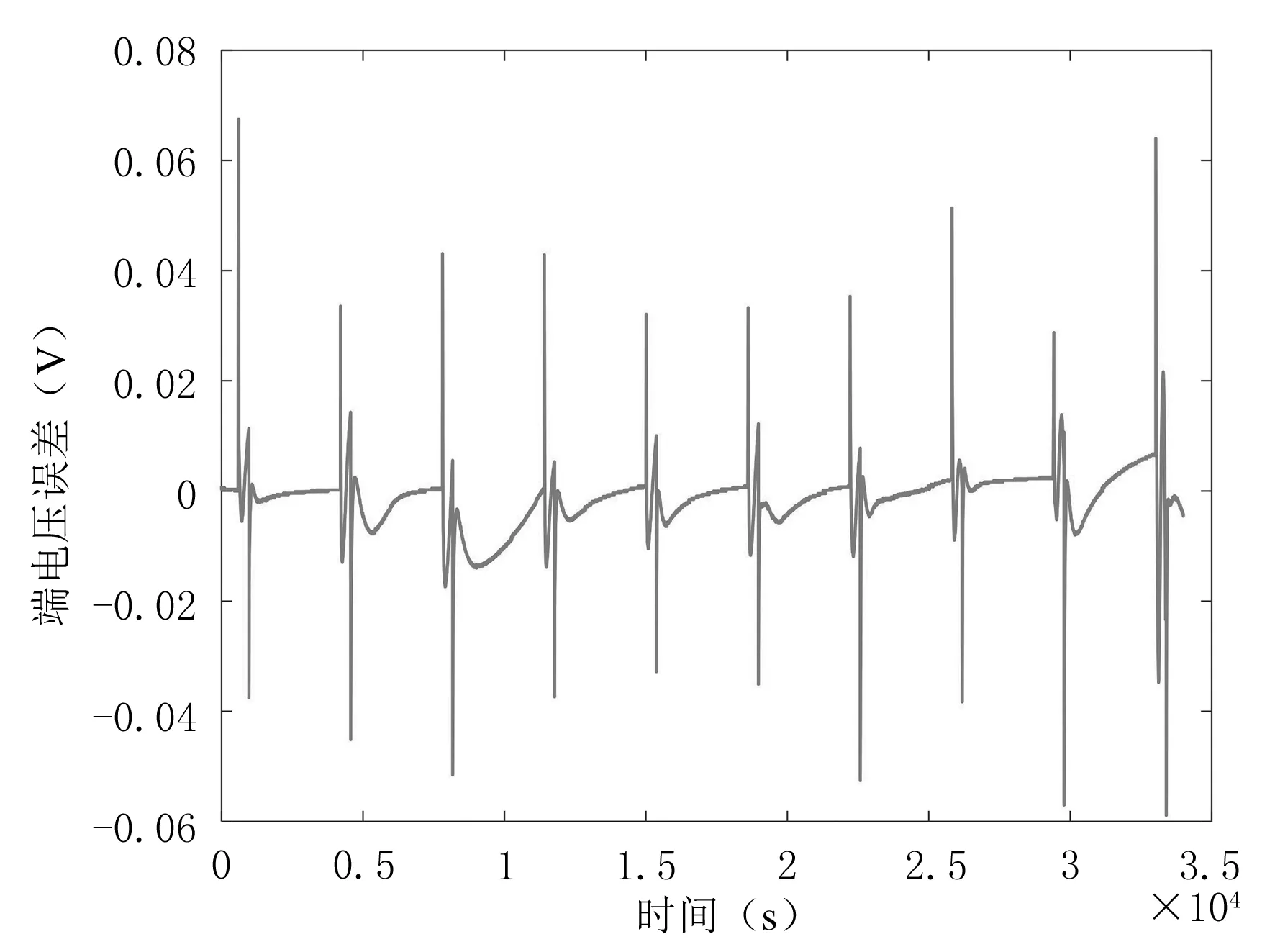
圖3 HPPC放電工況端電壓誤差
由圖3可以看出,在HPPC恒流放電工況下,二階RC等效電路的輸出端電壓誤差基本都在2%以內(nèi),只有極少部分時(shí)間誤差值超過(guò)2%,超出部分是因?yàn)樵诿總€(gè)脈沖放電初始時(shí)刻,鋰離子電池內(nèi)部復(fù)雜的電化學(xué)反應(yīng)無(wú)法第一時(shí)刻達(dá)到穩(wěn)定狀態(tài),導(dǎo)致誤差超過(guò)了2%.模型模擬精度相對(duì)較高,基本上符合參數(shù)辨識(shí)和SOC估算的要求.
在AEKF算法中,應(yīng)用了式(2)中的安時(shí)積分法對(duì)鋰電池SOC進(jìn)行估計(jì):
(2)
式中:SOC(t)為當(dāng)前t時(shí)刻的值;SOC(t0)為t0時(shí)刻SOC值;CN為電池總?cè)萘浚籌(t)為t時(shí)刻電流.將式(1)和式(2)進(jìn)行離散化處理,得到系統(tǒng)狀態(tài)方程如下:
(3)
2 基于VFFRLS算法在線參數(shù)辨識(shí)
2.1 RLS算法
RLS算法是最小二乘法的改進(jìn),相對(duì)于最小二乘法加入了遺忘因子這一重要參數(shù),遺忘因子是指對(duì)前一時(shí)刻辨識(shí)參數(shù)結(jié)果的遺忘程度.其原理是采用上一時(shí)刻的辨識(shí)結(jié)果和當(dāng)前時(shí)刻的系統(tǒng)輸入、輸出值來(lái)遞推出當(dāng)前時(shí)刻需要辨識(shí)的系統(tǒng)參數(shù).其系統(tǒng)方程如下:
(4)

把Uout(s)-Uoc(s)作為這個(gè)系統(tǒng)的輸出,IL(s)作為系統(tǒng)的輸入.那么系統(tǒng)的傳遞方程為
(5)
令τ1=R1C1,τ2=R2C2,將式(5)通過(guò)雙線性變換到Z域,再通過(guò)Z的逆變換得到離散化后的方程:
Uout(k)=Uoc(k)+
a1[Uoc(k-1)-Uout(k-1)]+
a2[Uoc(k-2)-Uout(k-2)]+
a3IL(k)+a4IL(k-1)+a5IL(k-2).
(6)
這樣就可以根據(jù)輸入變量和輸出變量求解出a1~a5的值.最后再通過(guò)反解a1~a5得到鋰電池SOC估計(jì)中所需要的R0、R1、R2和C1、C2值.
2.2 VFFRLS算法
VFFRLS是帶可變遺忘因子最小二乘法的簡(jiǎn)稱,它是對(duì)RLS算法的改進(jìn).取遺忘因子的最優(yōu)值至關(guān)重要,它決定了鋰電池SOC估計(jì)的準(zhǔn)確性.因此本文采用了帶有可變遺忘因子的最小二乘法VFFRLS算法,來(lái)提高RLS算法的收斂性和自適應(yīng)性.
可變遺忘因子λ的值會(huì)隨著RLS算法的估計(jì)誤差e(k)的大小而發(fā)生變化.1991年,可變遺忘因子的方法被J D Park[10]提出,表達(dá)式為
λ(k)=λmin+(1-λmin)·2L(k),
L(k)=-NINT(ρe(k)2),
式中:λ(k)為當(dāng)前時(shí)刻的遺忘因子;NINT為取整函數(shù);ρ為敏感因子.
基于北京理工大學(xué)米玉軒對(duì)此算法的改進(jìn),提出了一種更適應(yīng)于電池參數(shù)識(shí)別計(jì)算遺忘因子的方法[7]:
(8)
式中:λmax為遺忘因子的最大值;M為窗口大小;ei為i時(shí)刻的參數(shù)估計(jì)誤差.最后把遺忘因子的計(jì)算結(jié)果應(yīng)用到RLS算法中,再進(jìn)行參數(shù)識(shí)別.
3 VFFRLS與AEKF聯(lián)合算法
3.1 OCV-SOC擬合曲線
鋰電池的開(kāi)路電壓OCV和剩余電量SOC之間存在很強(qiáng)的對(duì)應(yīng)關(guān)系.通過(guò)對(duì)鋰電池進(jìn)行HPPC循環(huán)工況實(shí)驗(yàn)可以得到對(duì)應(yīng)關(guān)系.
首先以恒流方式給電池充滿電,靜置2 h,然后再以0.3 C恒流放電10%SOC,靜置1 h.循環(huán)上述過(guò)程直至SOC=0.實(shí)驗(yàn)測(cè)得的SOC與UOC數(shù)據(jù)如表1所列.
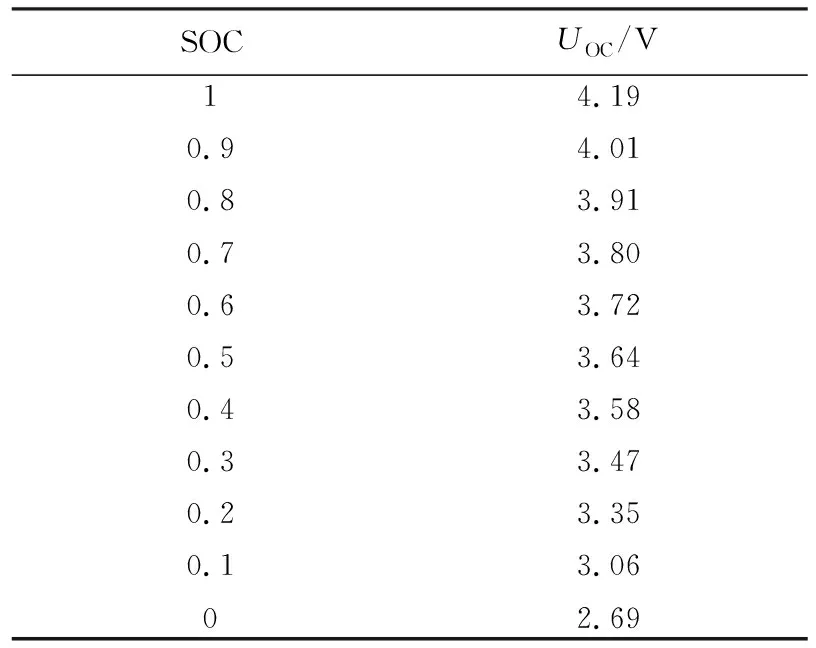
表1 HPPC工況下SOC與開(kāi)路電壓的數(shù)據(jù)
基于上面HPPC實(shí)驗(yàn)得到的SOC和UOC數(shù)據(jù),通過(guò)MATLAB軟件中Curve Fitting軟件對(duì)數(shù)據(jù)進(jìn)行6階多項(xiàng)式擬合,擬合后的SOC-OCV關(guān)系曲線如圖4所示.
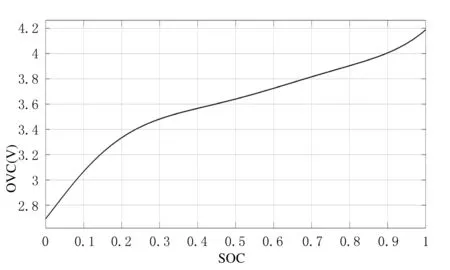
圖4 OCV和SOC關(guān)系曲線
可以通過(guò)Curve Fitting軟件計(jì)算得到6階多項(xiàng)式的系數(shù),那么開(kāi)路電壓UOC和SOC的函數(shù)關(guān)系式為
Uoc(S)=26.75S6-76.19S5+77.57S4-
-29.55S3- 1.17S2+4.13S+2.69.
(9)
3.2 AEKF算法
本文采用AEKF(自適應(yīng)擴(kuò)展卡爾曼濾波)對(duì)電池狀態(tài)進(jìn)行估計(jì).SOC估計(jì)的狀態(tài)方程和觀測(cè)方程分別為
xk+1=f(xk,uk)+wk,
(10)
yk=g(xk,uk)+vk,
(11)
其中:xk為系統(tǒng)的狀態(tài)向量;yk為系統(tǒng)的觀測(cè)向量;wk為系統(tǒng)白噪聲;vk為測(cè)量白噪聲.
隨后,結(jié)合參數(shù)識(shí)別的結(jié)果,對(duì)系統(tǒng)中SOC、電容電壓參數(shù)進(jìn)行估計(jì).基于AEKF算法可以對(duì)這些狀態(tài)變量進(jìn)行更新,更新過(guò)程如下:
(12)

3.3 VFFRLS與AEKF聯(lián)合估計(jì)算法
首先,通過(guò)傳感器測(cè)得鋰電池工作過(guò)程中的電壓、電流以及溫度等數(shù)據(jù).然后,基于電壓、電流等數(shù)據(jù)采用VFFRLS算法對(duì)鋰電池模型參數(shù)進(jìn)行辨識(shí),辨識(shí)出R0、R1、C1、R2、C2參數(shù),并將辨識(shí)結(jié)果和當(dāng)前時(shí)刻電壓電流值存儲(chǔ)起來(lái)用于下一時(shí)刻的參數(shù)辨識(shí).最后,將辨識(shí)的參數(shù)傳遞到AEKF算法中,并結(jié)合電壓電流數(shù)據(jù)進(jìn)行鋰電池SOC估計(jì),再將計(jì)算出的增益矩陣、協(xié)方差矩陣和系統(tǒng)狀態(tài)向量保存起來(lái)用于下一時(shí)刻的參數(shù)辨識(shí)和SOC估計(jì),這樣就實(shí)現(xiàn)了SOC聯(lián)合估計(jì).VFFRLS與AEKF聯(lián)合估計(jì)流程如圖5所示.
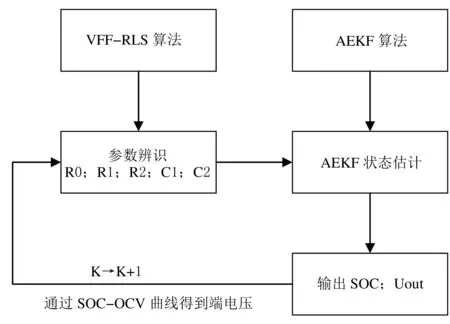
圖5 SOC估算流程圖
4 實(shí)驗(yàn)仿真與分析
為驗(yàn)證VFFRLS-AEKF聯(lián)合算法比RLS-AEKF和單個(gè)AEKF算法的SOC估計(jì)精度更高,本文基于二階RC等效電路模型,采用美國(guó)城市循環(huán)(UDDS)工況數(shù)據(jù)進(jìn)行SOC精度驗(yàn)證(UDDS循環(huán)工況更符合實(shí)際電動(dòng)汽車的運(yùn)行路況).SOC初始值設(shè)置為0.8,采樣周期為0.1 s.3種不同SOC估計(jì)算法的估計(jì)結(jié)果對(duì)比如圖6所示,SOC估計(jì)誤差對(duì)比如圖7所示.
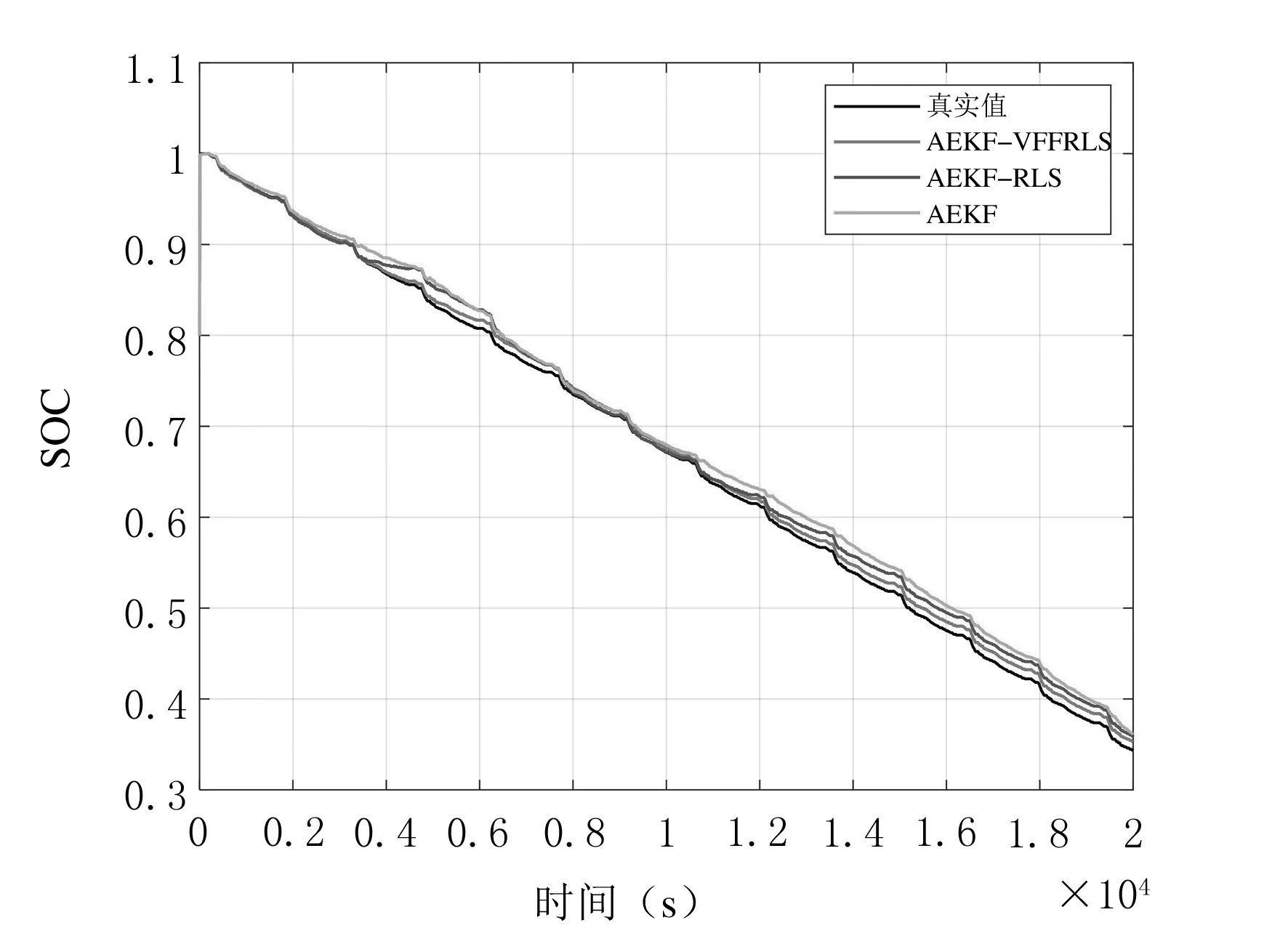
圖6 SOC估計(jì)結(jié)果對(duì)比圖
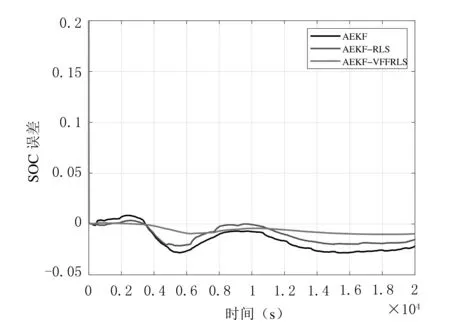
圖7 SOC誤差對(duì)比圖
由圖6的SOC估計(jì)結(jié)果可以看出:AEKF-VFFRLS聯(lián)合算法比另外兩種算法更加逼近真實(shí)值.由圖7的SOC誤差對(duì)比可以看出:AEKF-VFFRLS聯(lián)合算法SOC誤差最小,且SOC估計(jì)結(jié)果穩(wěn)定性更好.
為了更直觀體現(xiàn)3種SOC估計(jì)算法的估計(jì)精度,本文選取SOC平均誤差與SOC最大誤差作為評(píng)價(jià)指標(biāo),3種SOC估計(jì)算法的估計(jì)精度如表2所列.
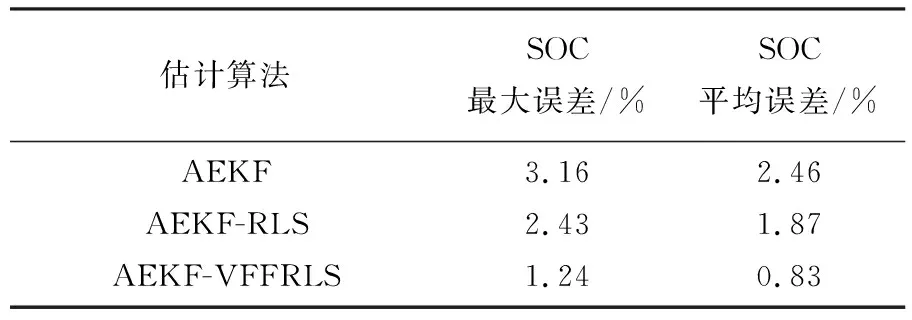
表2 不同算法的SOC估計(jì)誤差
由表2數(shù)據(jù)對(duì)比可知,在這三種算法中,AEKF-VFFRLS聯(lián)合算法的SOC最大誤差與SOC平均誤差的數(shù)值均最小,SOC估計(jì)的效果最好,平均誤差僅為0.83%;其次好的是AEKF-RLS聯(lián)合算法,平均誤差為1.87%;最不理想是單個(gè)的AEKF算法,平均誤差達(dá)到2.46%.由此可見(jiàn),AEKF-VFFRLS聯(lián)合算法相較于其他兩種算法具有更高的精確性和穩(wěn)定性.
5 結(jié)語(yǔ)
本文基于二階RC等效電路的基礎(chǔ)上,采用VFFRLS與AEKF聯(lián)合算法對(duì)鋰電池SOC進(jìn)行估計(jì).通過(guò)VFFRLS算法進(jìn)行參數(shù)辨識(shí),然后將辨識(shí)結(jié)果傳遞給AEKF算法中進(jìn)行SOC估計(jì).AEKF算法中計(jì)算出來(lái)的狀態(tài)向量,以及協(xié)方差矩陣保存起來(lái)用于下一時(shí)刻的參數(shù)識(shí)別和SOC估計(jì).重復(fù)上述過(guò)程就實(shí)現(xiàn)了SOC的在線估計(jì).并且通過(guò)仿真結(jié)果比較,VFFRLS-AEKF聯(lián)合算法的SOC估計(jì)精度比RLS-AEKF聯(lián)合算法提高了超1%,所以VFFRLS-AEKF聯(lián)合算法優(yōu)于RLS-AEKF算法.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
 蘭州文理學(xué)院學(xué)報(bào)(自然科學(xué)版)2022年4期
蘭州文理學(xué)院學(xué)報(bào)(自然科學(xué)版)2022年4期
- 蘭州文理學(xué)院學(xué)報(bào)(自然科學(xué)版)的其它文章
- 劉璐規(guī)劃設(shè)計(jì)作品
- 宋亞哲空間設(shè)計(jì)作品
- 新時(shí)期甘肅新建本科高校學(xué)報(bào)的辦刊水平與發(fā)展策略研究
——基于期刊評(píng)價(jià)指標(biāo)的調(diào)查與分析 - “雙減”背景下我國(guó)青少年體育教育培訓(xùn)高質(zhì)量發(fā)展的現(xiàn)實(shí)困境與推進(jìn)路徑
- 基于MIDAS GTS NX對(duì)基坑變形的影響分析
- 思維導(dǎo)圖在《物理化學(xué)》熱力學(xué)教學(xué)中的應(yīng)用