一種車載免置平全站儀概略位姿求解方法
2022-07-12 13:41:46曹娟華朱洪濤吳維軍
鐵道標準設計 2022年7期
曹娟華,朱洪濤,吳維軍,4,魏 暉,殷 華,朱 敏
(1.南昌大學機電工程學院,南昌 330031; 2.江西制造職業技術學院,南昌 330095;3.江西科技學院汽車工程學院,南昌 330098; 4.江西日月明測控科技股份有限公司,南昌 330029;5.江西農業大學軟件學院,南昌 330045)
引言
以全站儀為核心的軌道測量儀基于三維坐標法測量和控制軌道,俗稱絕對測量[1],能較好地控制軌道絕對位置、線路線形及長波平順性[2],但短波測量精度有限且測量效率偏低;以陀螺儀為核心的軌道檢查儀基于慣性軌跡法測量和控制軌道,俗稱相對測量,無法測量線路坐標,不能較好的控制線路長波平順性,但中短波測量精度好、測量效率高[3]。將絕對測量和相對測量進行多源信息融合,同時控制軌道絕對位置和長短波平順性,并兼顧測量效率,是當下軌道測量技術研究和發展的主要方向[4]。安博格的慣導小車和江西日月明的快速絕對測量小車正是同時具備坐標法測量和慣性軌跡法測量的典型產品,是“相對+絕對”復合測量的典型代表,在衛星定位測量還未達到高速鐵路毫米級測量精度要求的前提下,是軌道精測的主要手段和方法。
車載全站儀免置平設站是“相對+絕對”復合測量的核心和關鍵,其設站精度和設站效率是評價“相對+絕對”復合測量的重要指標[5]。根據CPⅢ控制網的精度:平面相鄰點相對點位中誤差為±1 mm、高程相鄰點高差中誤差為±0.5 mm[6-7],綜合考慮全站儀的測量精度指標(以Leica TS16為例):理想環境下一測回測角精度為1″,測距精度為1 mm+1.5 mm/km[8]。為滿足高速鐵路線路高平順性精度和高定位精度對設站的要求,工程上通常需要觀測8個CPⅢ控制點,特殊情況下還需要增加觀測點數量或采用多測回觀測等措施提高設站精度[9]。手動控制全站儀進行8個甚至更多CPⅢ控制點的觀測,必然造成設站效率偏低、儀器適用性差等問題的存在。前期以小車當前測量里程和線路設計線形為依據,以線路方位角和坡度角估計小車姿態,進而估計車載免置平全站儀的姿態和位置,從而實現基于1個CPⅢ控制點的自動設站[10],極大地提高了全站儀免置平設站及“相對+絕對”的復合測量模式的測量效率。
隨著我國鐵路大提速戰略的實施,既有線提速成為緩解鐵路運輸壓力最為有效的途徑。借鑒高速鐵路坐標法控制軌道的成功經驗,在既有線提速改造或既有高等級有砟線路的日常養護維修中引入坐標測量和控制,有利于更好地對線路線形和線路中長波進行控制,有利于線路在更長時間或周期中保持穩定[11]。在既有線線路測量引入中“相對+絕對”的復合測量模型,具有現實的意義和需要。然而,由于路基沉降、列車輪軌不均衡作用力影響、養修作業方式與習慣等原因,軌道三維坐標漂移,線路最初帶坐標的設計線形早已不復存在,基于線路設計線形的車載免置平全站儀位姿估計方法自然也就無法使用[12]。對不依賴線路線形的車載免置平全站儀概略位姿求解方法進行研究,以少量的觀測數據求解其概略位置和姿態,并以此為基礎推算出下一個CPⅢ待測點的大概方向,實現程序控制下的自動規劃、自動換盤、自動旋轉、自動照準及自動測量,即設站自動化,可一定程度地彌補由于多余觀測和多測回觀測帶來的效率上的損失。通過該方法的研究,對完善“相對+絕對”復合測量模式在不同工況下的應用,對提高既有線路養護水平有重要意義。
1 車載免置平全站儀概略位姿求解
1.1 概略位姿模型
如圖1所示,鐵路工程獨立坐標系O-XYZ下8個CPⅢ控制點[13]坐標為(Xi,Yi,Zi),i=1,2,…,8。全站儀處于非水平狀態,其位置和姿態參數(XS,YS,ZS,α,β,θ)未知,公式中涉及大量的三角函數,為非線性方程組,至少需要人工觀測4個CPⅢ控制點才可計算出全站儀的概略位置和姿態。
在傳統測量方法中,置平是全站儀能夠得到正確測量結果的前提。然而,通過人工調平無法獲得“絕對水平”,儀器總存在傾斜誤差,所以全站儀增加了雙軸補償功能,對水平度盤讀數和垂直度盤讀數進行傾斜補償改正,以提高測量精度。全站儀位置姿態是指全站儀獨立坐標系(坐標原點及坐標軸方向)相對于工程獨立坐標系的空間關系,全站儀傾斜姿態角與雙軸傾斜角既有區別又有聯系。如何利用現有手段和方法對車載免置平全站儀進行約束,挖掘未被使用的測量信息,構建車載免置平全站儀概略位姿求解模型,減少最少人工觀測點個數,是提高設站效率的關鍵。
(1)構建全站儀虛擬水平測量坐標系o-x′y′z′。設站前,通過Leica全站儀接口協議所提供的TMC_SetOrientation(double HzOrientation)子程序重置坐標方位角Hz[14],對全站儀坐標系o-xyz進行約束,使全站儀坐標系x軸和y軸與全站儀雙軸(視準軸方向和水平軸方向)方向重合,即:全站儀傾斜姿態角在數值上等于雙軸補償器測量得到的垂直軸傾斜在縱(視準軸方向)、橫(水平軸方向)兩個方向的傾斜分量。通過TMC_GetAngle (TMC_ANGLE &Angle, TMC_ INCLINE_PRG Mode)子程序對全站儀雙軸傾斜角進行測量,得到全站儀傾斜姿態角,即全站儀坐標系x軸與y軸的傾斜角α、β。構建全站儀虛擬水平測量坐標系,即:在當前全站儀坐標系的基礎上,保持坐標系原點和坐標系方位角不變,通過坐標系旋轉使x軸和y軸位于水平面內。
如圖2所示,在三維坐標系統中,求解全站儀位置(XS,YS,ZS)和姿態(α,β,θ)共計6個參數,最少需要4個觀測點數據,通過虛平操作,將估計參數和數據進行降維,只需要2個最少觀測點,為更早地實現測量自動化奠定基礎。
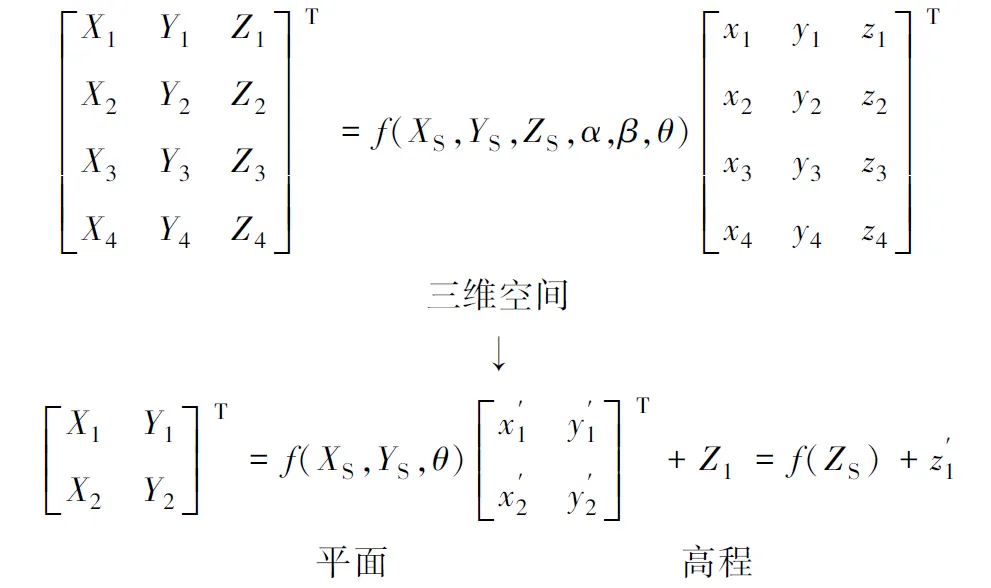
圖2 降維原理示意
1.2 概略位姿求解
根據空間坐標變換原理[15],構建全站儀坐標系o-xyz與全站儀虛擬水平測量坐標系o-x′y′z′間的坐標轉換函數。將全站儀坐標系o-xyz繞x軸旋轉角度α,使y軸位于x′oy′平面內,α角為旋轉前y軸與水平面之間的夾角
(1)
將全站儀坐標系o-xyz坐標系繞y軸旋轉角度β,使x軸位于x′oy′平面內,此時z軸與z′軸平行,β角為旋轉前x軸與水平面之間的夾角[16]



(3)
設全站儀所在位置為P點,在工程獨立坐標系下的坐標為(XS,YS,ZS),P點與CPⅢ控制點間的空間幾何關系、相關變量如圖3所示。
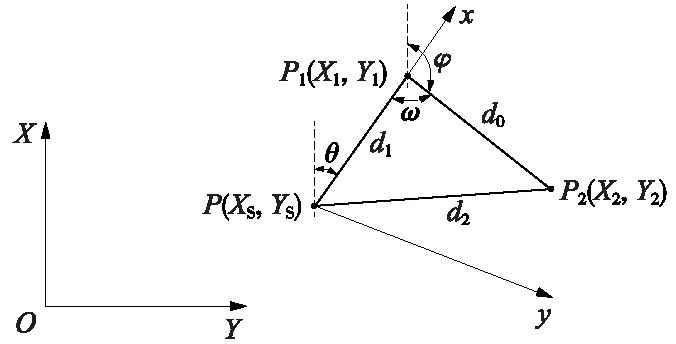
圖3 二維平面站點坐標計算示意
φ=arctan(Y2-Y1,X2-X1)
(4)

(5)
基于邊P1P的方位角和P1點的坐標,求解全站儀站點坐標

(6)

(7)
同時,全站儀站點高程可通過P1、P2點的高程和測量垂距進行求解,為提高精度,也可采用公式(8)進行加權法計算[17],其中k1,k2為權值,與其測量精度成正比,具體計算可采用P1、P2點測距值的倒數。
(8)

(9)
2 概略位姿精度分析
全站儀能否順利找到后續待測CPⅢ控制點,以實現設站的自動化,主要取決于站點概略位姿的解算精度能否滿足要求,屬于精度評定的范疇[18]。對概略位姿精度進行估計,也是本文算法研究的一項重要內容。
設第i個CPⅢ控制點的測量距離為si、水平角為γi,天頂距為φi,則測量坐標(xi,yi,zi)
(10)
(11)

σα和σβ為全站儀雙軸傾斜角α和β的測量中誤差,對全站儀雙軸傾斜角α和β進行重復測量。每次測量前將全站儀旋轉到任意角度,通過程序AUT_MakePositioning(0,π/2,0,0,0)將全站儀轉到0度方向,即,將全站儀坐標系x軸和y軸旋轉到雙軸所在的位置,通過TMC_GetAngle(Angle,0)子程序測量α和β,共計10次,傾斜角α和β的測量值如表1所示。
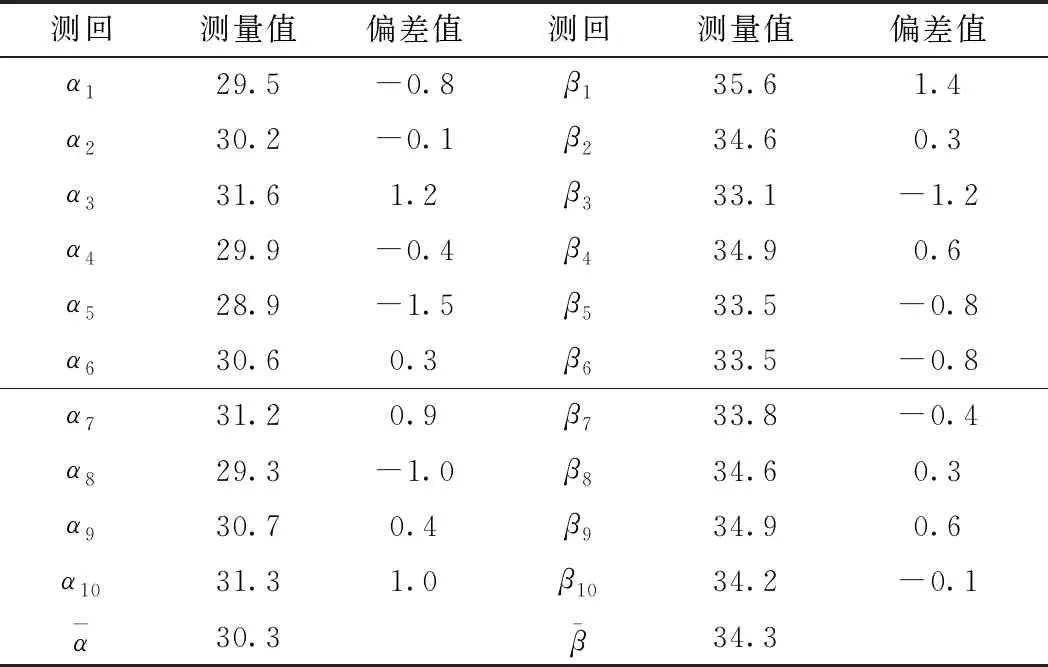
表1 傾斜角α、β測量值 (″)
采用白塞爾公式計算傾斜角α、β的測量中誤差σα和σβ
(12)
(13)
(14)
基于全站儀站點概略位姿計算下一個CPⅢ待測點方向,綜合考慮站點點位誤差、方位角誤差及全站儀傾斜角誤差,得到關于待測點照準方向角誤差的不等式

(15)
式中,ΔP為站點點位誤差;Δθ為設站方位角誤差。

(16)
根據偶然誤差的概率分布規律,取3倍中誤差作為待測點方向誤差的極限誤差U[20],應有
(17)

3 免置平自動設站的實現與試驗

(18)
其中
R=


(19)

(20)
3.1 線路試驗
儀器:Leica TS16全站儀1臺,快速絕對測量小車1套,Leica GPR121棱鏡8套。
溫度:18~26 ℃; 氣壓:1 004~1 008 hPa; 濕度:56%~77%;
3.2 試驗步驟
(1)快速絕對測量小車在軌道上停穩,進行相關初始化設置(重置全站儀方位角,讀取雙軸傾斜角)。

(3)計算下一個CPⅢ待測點的相關信息,控制程序自動旋轉并照準該CPⅢ待測點,得到該CPⅢ控制點的旋轉誤差ΔAh和ΔAv。
(4)重復步驟(3),完成自動設站,得到所有CPⅢ測點的旋轉誤差ΔAh和ΔAv。
(5)推動小車1~2 m并重新打開剎車停穩,選擇不同的起始點進行手工照準和測量,重復步驟1~4,完成10次設站并記錄所有測點的旋轉誤差ΔAh和ΔAv。結果數據如表2所示。
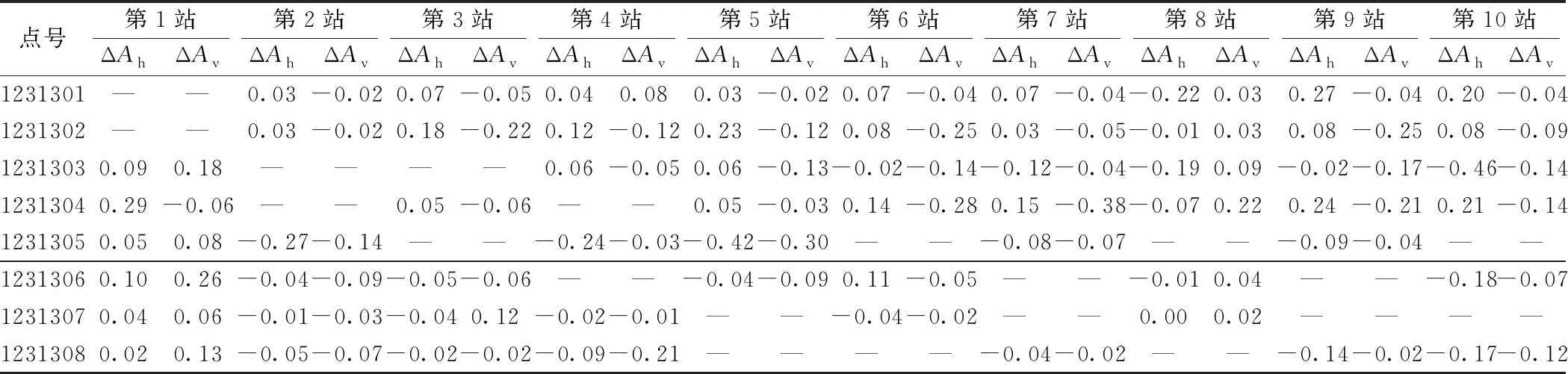
表2 旋轉誤差ΔAh和ΔAv (°)
首先,從試驗過程上看,程序在后續設站中均能準確地找到待測目標,可見站點概略位姿求解方法提高了設站的自動化程度及設站的效率。其次,從各測站的數據上看,旋轉誤差ΔAh和ΔAv均小于0.5°,可見旋轉誤差遠小于全站儀4°的ATR窗口搜索范圍,說明該方法能夠獲得較高精度的全站儀站點概略位姿。
4 結論
通過虛平降維及空間坐標轉換,提出了一種不依賴線路設計線形,基于2個CPⅢ控制點的免置平設站概略位姿求解方法,提高了復合測量模式在不同工況下的適用性,特別是在設計線形已不復存在的既有線養護維修中尤為重要。通過理論精度分析和線路試驗得到以下結論。
(1)通過對全站儀雙軸傾斜補償和姿態傾斜角等的分析,使全站儀傾斜姿態角與雙軸傾斜角重合并完成測量。基于全站儀虛擬水平測量坐標系,實現概略位姿估計參數和觀測數據的降維,進而構建概略位姿求解模型,達到基于2個CPⅢ控制點進行免置平全站儀概略位姿求解的目的。該方法構思精巧,原理清晰。
(3)線路試驗表明,全站儀在自動設站過程中能準確地找到待測目標,旋轉照準誤差ΔAh和ΔAv誤差均較小,不超過0.5°。本文所提出的車載免置平全站儀概略位姿求解方法,提高了設站的自動化程度和設站效率,完善了“相對+絕對”的復合測量模式在不同工況下的應用,提高了既有線路運營維護中的線路測量效率。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
