地鐵列車制動不緩解故障分析與解決措施
2022-07-15 02:38:44乙永強管凱凱李大勇
城市軌道交通研究 2022年6期
乙永強 陳 磊 魏 松 管凱凱 李大勇
(青島地鐵集團有限公司運營分公司, 266031, 青島∥第一作者, 工程師)
青島地鐵3號線(以下簡為“3號線”)列車采用德國克諾爾集團研制的EP2002制動系統。該系統采用基于網絡及硬線冗余的控制方式,其核心部件為EP2002閥。該閥是一個高度集成及智能化的機電一體化設備,可將制動控制與制動執行集成在一起。
列車制動不緩解故障是指在制動緩解指令下達后,制動力在一定時間內不能緩解到規定值,從而導致車輛抱閘。該故障可能造成輪對和軌面的擦傷,甚至需要車輛救援。從運營安全考慮,制動不緩解故障對行車安全的影響較大。
3號線列車正線運行時,列車發生制動不緩解故障,司機切除故障車B05后,列車限速5 km/h運行。以此故障為例,對制動不緩解故障的檢測邏輯、故障原因等進行分析,并對制動不緩解故障導致的列車限速條件及故障應急處理措施進行優化。
1 3號線列車制動系統簡介
1.1 EP2002制動系統構成
EP2002制動系統是目前世界最先進的空氣制動系統之一。與傳統的車控式空氣制動系統不同,EP2002制動系統采用架控式結構,每個轉向架上都有1個EP2002閥,起到獨立控制的作用,各閥通過CAN(控制器局域網)總線或車輛總線進行連接,傳遞信息和指令,一旦某個EP2002閥發生故障,只會影響到1個轉向架,這樣就分散了風險,減小了對車輛的影響。
3號線列車EP2002制動系統網絡拓撲圖如圖1所示。

注:Tc為帶司機室的拖車;M為無受電弓的動車;MPU為主處理單元;MVB為多功能車輛總線。
通過網關閥(G 閥)、智能閥(S 閥)形成了分散式制動控制網絡。每個閥均安裝在轉向架附近(每個轉向架安裝1個閥),分別控制對應轉向架的常用制動、快速制動、緊急制動和車輪滑行保護,EP2002閥之間通過專用的雙通道 CAN總線聯接通信。圖1中,CAN總線單元內的兩個網關閥都具有與列車管理系統通過MVB(多功能車輛總線)通信的功能,但同一時刻只有1個網關閥(主網關閥)與列車管理系統通信,另一個網關閥處于熱備狀態作為冗余。CAN總線單元內的4個智能閥通過CAN總線與網關閥進行通信,并與網關閥的智能閥模塊共同完成車輛的常用制動、快速制動、緊急制動和防滑功能。整車與EP2002制動系統的關系如圖2所示。

注:ATO為列車自動運行;ATP為列車自動防護。圖2 3號線列車整車系統與EP2002制動系統的關系
1.2 EP2002閥
在EP2002控制系統中,EP2002閥是最重要的組成部件,且是一個高度集成、高度智能化的機電一體化部件,具有智能處理及網絡通信的功能,主要包含智能閥和網關閥。
1) 智能閥:包含1個PVU(氣動閥單元)和安裝在氣動伺服閥上的電子控制部分。通過相應CAN總線單元傳輸的制動指令,每個智能閥對相應轉向架上的BCP(制動缸壓力)進行控制。智能閥具有常用制動、快速制動、緊急制動和防滑保護功能。智能閥結合相應車軸產生的速度數據和單元內其他EP2002閥通過CAN總線傳來的速度數據,進行車輪防滑保護。圖3展示了智能閥的I/O(輸入/輸出)狀況。
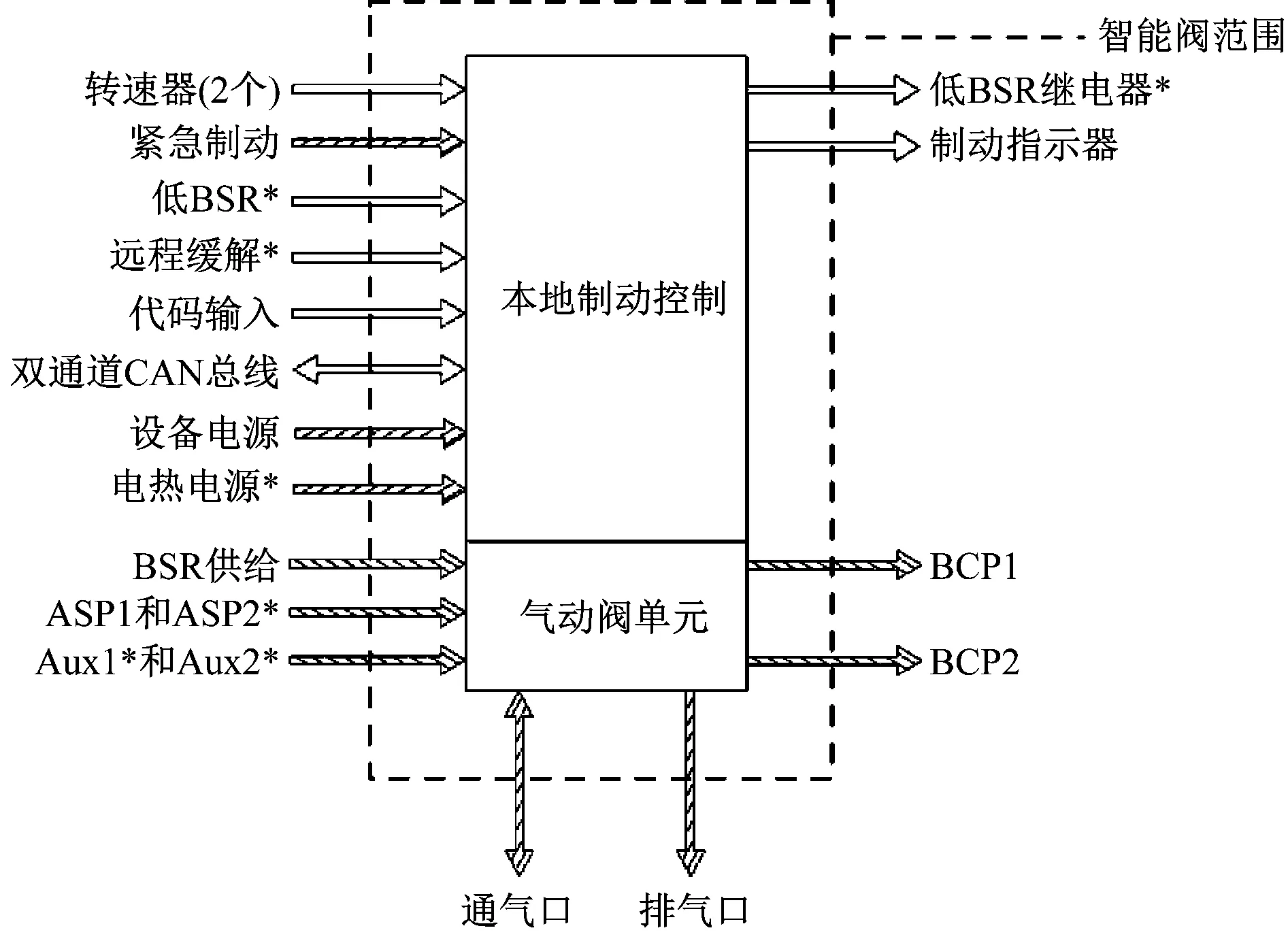
注:ASP為空簧壓力;BCP為制動缸壓力;BSR為制動風缸;Aux為停放壓力;為氣動裝置;為電源;為信號;*為可選設備。
2) 網關閥:網關閥具有智能閥的所有功能,并通過集成的MVB網絡接口卡接收列車管理系統傳輸的制動指令。列車制動力計算完成后,將常用制動、快速制動壓力分配至CAN總線單元內的所有EP2002閥。CAN總線單元內的兩個網關閥都具有與列車管理系統通信的功能,但同一時刻只有1個網關閥(主網關閥)與列車管理系統通信,另一個網關閥處于熱備狀態。若主網關閥發生故障,熱備的網關閥立刻取代其功能,保證單元的制動系統正常工作,提高了系統的可靠性。圖4展示了網關閥的I/O狀況。
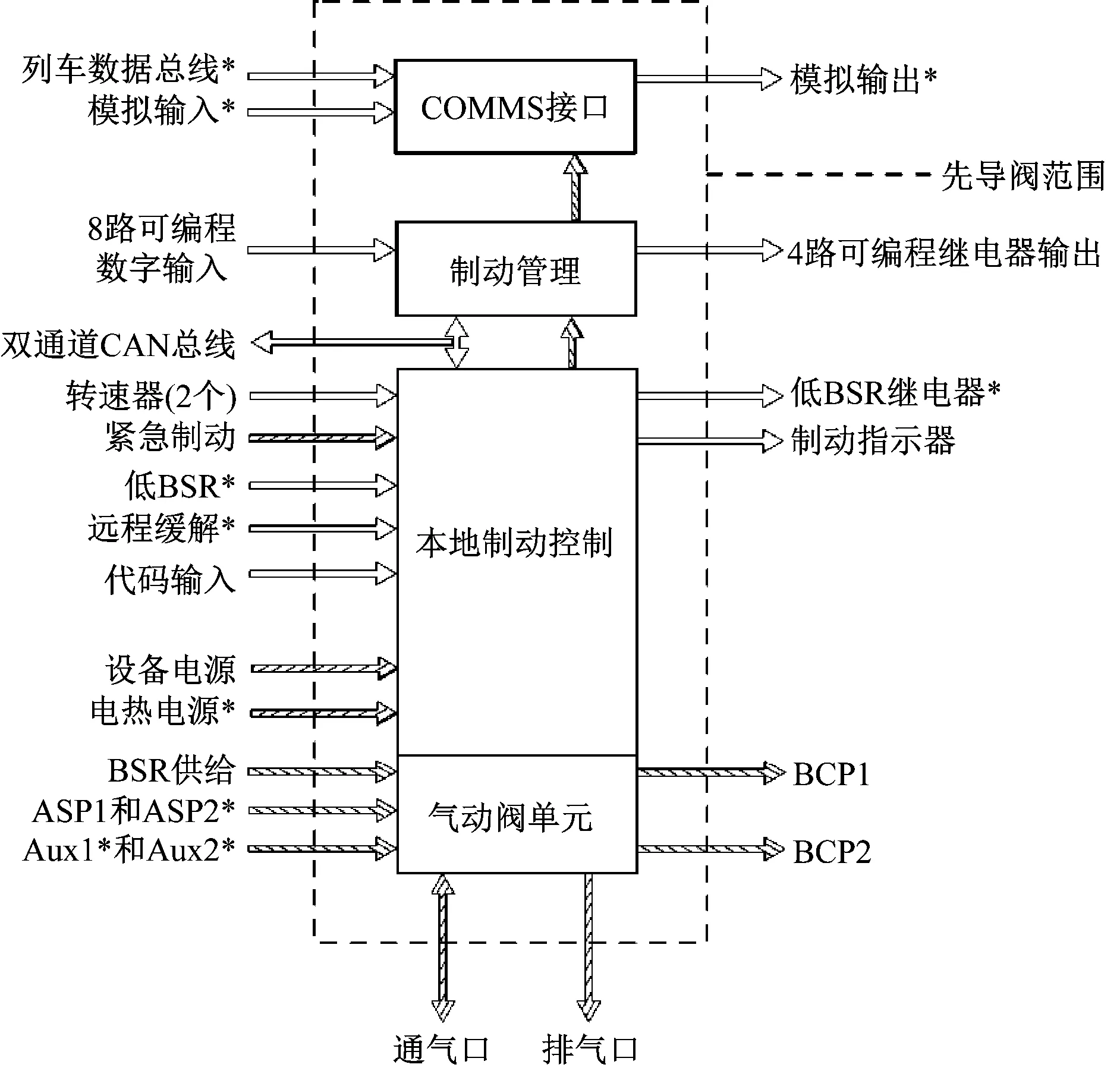
注:COMMS為網絡通信卡。圖4 網關閥的I/OFig.4 I/O of gateway valve
2 列車制動不緩解故障分析
2.1 列車制動不緩解檢測邏輯
每個EP2002閥都具有制動不緩解檢測功能。當列車運行速度>2 km/h時,如果制動系統未收到制動指令,且某個制動缸處于未緩解狀態(制動缸壓力>0.025 MPa),此種情況持續5 s,相應的EP2002閥將生成制動不緩解故障。該故障通過網絡傳輸至TCMS(列車控制與管理系統)并在司機顯示屏上彈出,同時也通過硬線輸出高電平,以點亮司機控制臺上的制動不緩解指示燈。制動不緩解故障報出時,列車牽引將被切除。
制動不緩解故障的復位條件通常為:在非制動工況下,BCU(制動控制單元)檢測到故障制動缸的壓力下降到0 后(制動缸壓力精度約±0.02 MPa),制動不緩解故障復位。當切除故障轉向架B05后將制動不緩解故障狀態復位,牽引封鎖解除。
研制的不同制動系統克諾爾項目對于制動不緩解的邏輯判斷雖有差異,但其基本判斷邏輯是一致的。
2.2 列車制動不緩解故障原因分析
3號線某列車在站臺作業完畢后準備動車,司機發現制動不緩解指示紅燈亮,列車無法動車,按壓制動強迫緩解按鈕時制動緩解,但松開后再次出現制動不緩解。司機切除故障車B05塞門,列車動車后,列車限速5 km/h運行,后續車輛又自行恢復正常速度。
2.2.1 故障記錄分析
根據EP2002閥故障記錄,M3車持續閃報故障代碼66的CAN網絡通信故障,并且迅速恢復正常,但此類閃報故障在駕駛員顯示器并無提醒;列車制動不緩解故障發生前后,該車網關閥持續閃報CANBus網關故障。故障數據如圖5所示。

圖5 M3車CANBus網絡通信故障數據
初步分析,M3車的EP2002閥發生故障,制動不緩解信息誤發至網絡,進而通過硬線反饋使得制動不緩解指示燈亮,但車輛實際上并未發生制動不緩解故障,司機切除B05后制動不緩解指示燈恢復正常,但制動不緩解指令仍發給網絡,進而導致列車進行牽引安全防護、限速運行。
2.2.2 故障閥返廠檢測分析
將故障閥返廠檢測發現,智能閥RBX(本地制動控制卡)中芯片IC55的P8.2引腳輸出的PSU(供電單元卡)Test1信號異常。經分析,RBX板卡故障由芯片IC49失效導致,此芯片用于控制PSU低壓保護電路。RBX板卡如圖6所示。

圖6 RBX板卡Fig.6 RBX board
智能閥RBX板卡中的IC49芯片引腳 #14與引腳 #3短路,導致SK1_A 16輸出持續被拉高,PSU板卡低壓保護電路被觸發保護功能,影響PSU板卡CANBus通信網絡供電回路的穩定性,造成智能閥與網關閥之間的通信不穩定。網關閥通過CAN網向其他閥發送制動需求指令,也基于CAN網獲取同一個單元內其他閥的制動施加/緩解狀態信息。當CAN網通信不穩定時,網關閥無法及時準確地接收智能閥反饋的制動施加/緩解信號,從而導致網關閥對制動不緩解的判斷異常。
3 列車制動不緩解故障解決措施
3.1 限速軟件修改
本次列車制動不緩解故障是由于智能閥內RBX板卡故障使得制動不緩解信息誤發至網絡,從而導致列車限速,但車輛實際上并未發生制動不緩解故障。列車網絡系統的判斷信號應該采用更真實、可靠的硬線信號,以減少網絡故障導致的信號誤發及干擾。
3.1.1 現車限速判斷條件
列車網絡系統同時采集制動系統中各個網關閥和智能閥提供的制動不緩解信號,每列列車共采集到12個信號,只要有1個或1個以上閥發出制動不緩解信號,則該系統則生成列車級制動不緩解信號。當列車運行速度超過5 km/h且列車級制動不緩解信號存在,則網絡系統禁止牽引。制動不緩解信號如圖7所示。

圖7 制動不緩解信號Fig.7 Braking non-release signal
3.1.2 修改限速判斷條件
將空氣制動施加信號作為制動不緩解故障的判斷限速條件,且該制動施加信號由單獨的繼電器控制,隔離度較高、性能穩定,且很少存在誤判斷的情況。
由智能閥和網關閥發出的制動施加狀態信號可知,空氣制動施加繼電器采集所有閥的空氣制動施加信號,當所有列車制動均緩解后,該繼電器失電,此時列車制動施加信號變為低電平,其中一路信號發送到操縱臺上的空氣制動施加指示燈,一路信號發送到BBO(黑匣子)進行記錄。
車輛在牽引狀態下施加制動后,“所有制動緩解”的列車線變成低電平。此時如果車輛運行速度超過5 km/h,則列車網絡系統禁止牽引。
3.2 應急故障處理優化
針對列車制動不緩解故障,在原應急操作指引基礎上進行優化,增加斷開該節車電器柜內的制動單元斷路器的操作,以防止EP2002閥誤發制動不緩解信號。具體操作步驟如下:
1) 按壓操縱臺上的強迫緩解按鈕,進行強迫緩解。
2) 切除該節車上的兩個制動切除閥B05,斷開該節車電器柜內的制動單元斷路器QFBCU。
3) 當制動仍不緩解且無法判斷具體轉向架位置,或切除B05車并斷開相應制動單元斷路器后故障不消除,或牽引存在封鎖、實施5 km/h限速時,將制動不緩解旁路開關SKNRB置強制位。
4) 將應急運行模式開關SKEMP打到應急位進行牽引,若能夠牽引,建議在列車到達的當前站或下一站清客;若牽引失敗,則申請救援。
4 結語
針對青島地鐵3號線列車制動不緩解故障,從制動控制原理出發,對故障的檢測邏輯、故障原因分析等進行了詳細闡述。將更為可靠的空氣制動施加信號重做邏輯作為制動不緩解故障的判斷限速條件,以減少網絡故障導致的信號干擾。對制動不緩解故障的應急操作指引進行優化,以便更快處理故障,減少其對列車運營的影響。
猜你喜歡
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
制造技術與機床(2019年12期)2020-01-06 03:17:46
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
西南交通大學學報(2018年5期)2018-11-08 10:58:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道運營技術(2015年3期)2015-12-23 09:27:14
