復(fù)興號服役動車組弓網(wǎng)受流性能數(shù)據(jù)跟蹤采集方法研究*
2022-07-15 03:42:40孔龍飛韓通新劉忠彬
鐵道機車車輛 2022年3期
關(guān)鍵詞:測量
孔龍飛,韓通新,李 卓,田 亮,劉忠彬,戴 晉
(1 中國鐵道科學(xué)研究院集團有限公司 機車車輛研究所,北京 100081;2 北京縱橫機電科技有限公司,北京 100094)
弓網(wǎng)受流性能參數(shù)用于評價受電弓和接觸網(wǎng)系統(tǒng)相互作用。弓網(wǎng)受流性能試驗是動車組整車型式試驗的重要組成部分,同時也是高速鐵路接觸網(wǎng)系統(tǒng)動態(tài)驗收試驗的重要測試項目。自我國發(fā)展高速鐵路和動車組以來,研究人員對高速動車組弓網(wǎng)受流性能開展了大量測試,為高速鐵路弓網(wǎng)耦合、高速受流的弓網(wǎng)系統(tǒng)改進做出了重要貢獻。
評價弓網(wǎng)相互作用的重要指標,主要是弓網(wǎng)動態(tài)接觸力。此外,接觸網(wǎng)動態(tài)抬升量和燃弧監(jiān)測也被采納為評價弓網(wǎng)相互作用的重要指標[1]。
為確保受電弓連續(xù)取流時沒有電壓降或電流損失,必須使受電弓和接觸網(wǎng)保持良好的機械接觸,否則會產(chǎn)生燃弧。燃弧會對周圍環(huán)境產(chǎn)生電磁干擾、噪聲干擾并加劇弓網(wǎng)間的磨耗。如果空氣間隙持續(xù)增大,取流中斷,車輛就會因為電源切斷而失去牽引動力[2]。引起接觸不良的原因主要包括弓網(wǎng)的機械振動、接觸線損耗、接觸線覆冰、接觸力不足等[3]。弓網(wǎng)燃弧可通過測量弓網(wǎng)接觸電阻、紫外光學(xué)傳感器[1]和視頻圖像等方法進行測量[4]。
在運營速度遠低于接觸線橫波傳播速度時,利用受電弓通過接觸線時的抬升量可以得知受電弓運行狀況。支持結(jié)構(gòu)上的最大抬升與受電弓的接觸壓力正相關(guān),因此可以間接的反映出弓網(wǎng)動態(tài)接觸力情況。動態(tài)抬升量測試方法包括2 種,即在接觸網(wǎng)支持裝置處固定測量方法和在車輛上利用光學(xué)儀器移動測量方法[2]。
研究運營動車組弓網(wǎng)受流性能變化規(guī)律,需要長時間對服役動車組弓網(wǎng)受流性能數(shù)據(jù)進行跟蹤采集。普通服役動車組沒有車載弓網(wǎng)受流性能監(jiān)測設(shè)備,也不便于長期加裝臨時設(shè)備。如果為每輛動車組配備設(shè)備,勢必是投資高、回報少的。一直以來,利用弓網(wǎng)監(jiān)控視頻人工分析弓網(wǎng)燃弧都是一個重要手段,文中利用復(fù)興號動車組配備的弓網(wǎng)監(jiān)控視頻,自主研發(fā)了一套“基于弓網(wǎng)監(jiān)控視頻的弓網(wǎng)受流參數(shù)離線采集分析系統(tǒng)”,實現(xiàn)服役動車組弓網(wǎng)燃弧和受電弓動態(tài)包絡(luò)線的跟蹤檢測。
1 系統(tǒng)組成
系統(tǒng)主要包括2 部分,第1 部分是弓網(wǎng)視頻采集,第2 部分是弓網(wǎng)受流數(shù)據(jù)采集。弓網(wǎng)視頻采集包括采集車載弓網(wǎng)監(jiān)控視頻和車輛傳感器數(shù)據(jù)、數(shù)據(jù)合并、視頻存儲等。弓網(wǎng)受流數(shù)據(jù)采集包括弓網(wǎng)監(jiān)控視頻圖像壓縮合并處理、弓網(wǎng)燃弧識別和受電弓動態(tài)包絡(luò)線參數(shù)測量。因為車載的弓網(wǎng)監(jiān)控視頻需要轉(zhuǎn)存到車下用于進一步的弓網(wǎng)受流參數(shù)采集,所以這種數(shù)據(jù)采集方式屬于離線采集。系統(tǒng)組成如圖1 所示。動車組每臺受電弓都配有受電弓監(jiān)控系統(tǒng),主要由高清監(jiān)控攝像機、數(shù)據(jù)線、顯示器、車載數(shù)據(jù)接收計算機、視頻存儲等部分組成。弓網(wǎng)視頻都是以每10 min 為單位進行分段存儲,原始像素2 048×1 536,視頻幀率25 fps,視頻數(shù)據(jù)較大。為了提高圖像識別效率,首先對已存儲的每段視頻按需求進行壓縮合并處理,壓縮后視頻圖像像素為800×600,幀率25 fps,然后合并多段視頻為1 個視頻文件,最后經(jīng)過受流數(shù)據(jù)采集分析系統(tǒng)完成弓網(wǎng)燃弧和受電弓動態(tài)包絡(luò)線參數(shù)檢測。
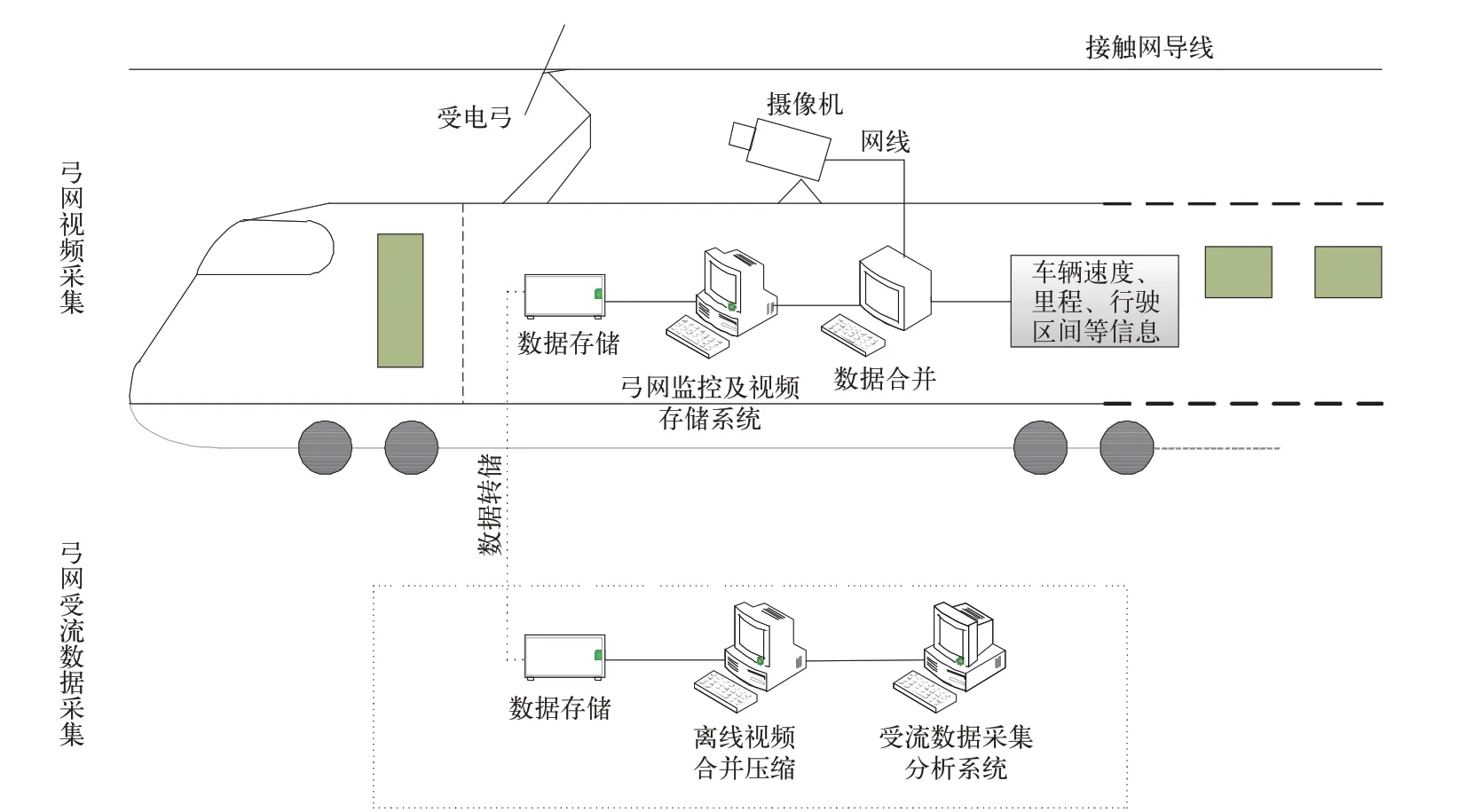
圖1 弓網(wǎng)監(jiān)控視頻弓網(wǎng)受流參數(shù)離線采集系統(tǒng)組成示意圖
2 實現(xiàn)方法流程圖
算法流程如圖2 所示。在采集前,首先在動車所內(nèi)利用標定靶對已知受電弓滑板運動區(qū)域平面進行標定,得到圖像坐標與世界坐標轉(zhuǎn)換矩陣H并儲存。然后再利用從動車組上轉(zhuǎn)存下來并且做了壓縮合并處理的視頻完成數(shù)據(jù)采集。取每一幀當前圖像,檢測跟蹤接觸線和受電弓的接觸點,從而確定燃弧可能發(fā)生的區(qū)域,利用燃弧前景輪廓特征來識別燃弧,并且保存發(fā)生燃弧的當前幀圖像。由于受電弓動態(tài)包絡(luò)線的測量重點部位往往位于若干個支柱處[5],所以需要智能識別接觸點上方區(qū)域接觸網(wǎng)定位裝置,并且保存當前幀圖像。為了提高識別和測量的準確性,需要人工復(fù)核保存的圖像,在經(jīng)過復(fù)核的圖像上,利用鼠標拾取受電弓抬升距離和擺動量距離,即受電弓動態(tài)抬升量及橫向擺動量參數(shù)。

圖2 實現(xiàn)方法總體流程圖
3 接觸點連續(xù)定位
受電弓與接觸網(wǎng)的接觸點識別是非常重要的,大量弓網(wǎng)問題的發(fā)生是由于這個點的受電弓與接觸網(wǎng)的不可靠接觸造成的[2]。
因此通過圖像識別定位燃弧,首先要做到弓網(wǎng)接觸點準確連續(xù)的定位。
建立復(fù)興號動車組的單臂受電弓弓頭垂向運動和橫向運動平面坐標系,采用文獻[6]提出的基于二維圖像直線的受電弓滑板運動區(qū)域標定方法對車載的弓網(wǎng)監(jiān)控視頻圖像進行標定,確定受電弓滑板圖像每個像素點圖像坐標與世界坐標的變換關(guān)系。
利用基于Sobel 算子的邊緣檢測算法,檢測受電弓滑板和接觸線邊緣,采用概率Hough 變換的直線檢測方法來識別受電弓滑板和接觸線[7],通過滑板直線和接觸線數(shù)學(xué)公式可以準確計算并定位滑板與接觸線的接觸點坐標,再用Kalman 濾波跟蹤方法來識別滑板和工作支接觸線的接觸點。接觸點檢測過程如圖3 所示。

圖3 弓網(wǎng)接觸點連續(xù)定位過程
4 燃弧識別與圖像存儲
準確檢測和跟蹤弓網(wǎng)接觸點后,可以由接觸點來確定一個燃弧感興趣區(qū)域,如圖4(a)所示。檢測感興趣區(qū)域內(nèi)的前景圖像,如圖4(b)所示。燃弧的識別判斷方法主要包括燃弧前景檢測,輪廓矩判斷識別,滑板區(qū)域燃弧判斷。
(1)前景檢測
對燃弧感興趣區(qū)域圖像二值化處理,可以獲得前景圖像。設(shè)farc(x,y)表示輸入燃弧感興趣區(qū)域視頻序列的原始圖像,F(xiàn)arc(x,y)表示前景二值化圖像,則二值化圖像可以表示為式(1):

式中:255 為前景區(qū) 域;0 為背景區(qū)域;Th為二值化閾值。
燃弧區(qū)域圖像像素值大于Th的像素點認為是前景區(qū)域,反之為背景區(qū)域。獲得前景二值化圖像后,為了消除圖像噪聲、不連續(xù)區(qū)域和空洞,對其采用連續(xù)的標準開運算和閉運算。
(2)輪廓矩判斷識別
通過大量觀察燃弧前景圖像樣本,掌握燃弧形態(tài)特征,可以準確識別燃弧及排除夜間補光燈的干擾。
圖像矩可以用來計算輪廓形狀的重心、面積、主軸和其他特征表示為式(2):

式中:I(x,y)表示像素點(x,y)的亮度值。
一階矩和零階矩可以計算輪廓的重心為式(3):

二 階 矩M20、M11、M02可 以 計 算 輪 廓 的 方 向為式(4):

觀察燃弧前景圖像輪廓,將重心十分接近接觸點、角度接近于0、輪廓最小外接矩形的長寬比例等作為先驗知識,可以有效地識別出燃弧并且避免各種環(huán)境干擾。
(3)滑板區(qū)域判斷
通過觀察燃弧前景會侵入滑板區(qū)域,因此判斷滑板區(qū)域是否有燃弧像素,也可以一定程度上排除干擾結(jié)果。如圖4(c)所示。

圖4 弓網(wǎng)燃弧識別
燃弧被識別后,系統(tǒng)會自動輸出并保存燃弧圖像,并以幀號命名,供試驗人員復(fù)核結(jié)果及做分析。部分燃弧識別結(jié)果如圖5 所示。

圖5 燃弧識別結(jié)果
5 受電弓動態(tài)包絡(luò)線測量
監(jiān)控滑板上方區(qū)域的異常物,異常物輪廓連通面積大于一定閾值以區(qū)別接觸線的輪廓,從而識別出定位裝置,并保存當前圖像。拾取靜態(tài)下受電弓高度和拾取通過定位器時受電弓高度分別如圖6、圖7 所示。

圖6 拾取靜態(tài)下受電弓高度

圖7 拾取通過定位器時受電弓高度
受電弓動態(tài)包絡(luò)線參數(shù)測量是在受電弓滑過定位器時的圖片中進行的,具體方法如下:
(1)抬升量測量方法
為了測量結(jié)果準確,首先人工復(fù)核圖像中定位器是否接近受電弓滑板,然后利用鼠標手動拾取接觸點坐標,自動測量出接觸點高度值h1。鼠標手動拾取站臺靜止受電弓接觸點高度h0。
則受電弓動態(tài)抬升量表示為式(5):

通過圖6 和圖7 的對比,可以看出受電弓在運行過程中有明顯的抬升,運行速度341 km/h,受電弓抬升量為61 mm。
(2)橫向擺動量測量方法
接觸線動態(tài)拉出值測量曲線可以清晰地展示出接觸線橫向運行軌跡[8],而且也表明了受電弓滑過支柱的序號。對接觸網(wǎng)靜態(tài)數(shù)據(jù)表查表可以很快查找當前圖片支柱定位點的靜態(tài)拉出值S。因為接觸網(wǎng)定位點處靜態(tài)拉出值幾乎是一個定值,幾乎不隨環(huán)境變化或受電弓動態(tài)作用而改變,所以定位點是一個理想的參照物,定位點靜態(tài)拉出值是確定靜態(tài)下受電弓中心線的關(guān)鍵。通過鼠標拾取弓網(wǎng)接觸點,采用“橡皮筋技術(shù)”沿滑板中心方向繪制直線段,線段終點顯示世界坐標距離,當距離等于靜態(tài)拉出值|S|時,此終點被確定為靜態(tài)下受電弓中心線的一點。最后利用同樣的線段拾取方法,從靜態(tài)下受電弓中心線這一點為起點鼠標拾取到受電弓滑板中心點(動態(tài)下受電弓中心線上一點)的距離ΔS,ΔS可以看作受電弓橫向擺動量測量值。測量方法示意圖如圖8 所示,實測結(jié)果如圖9 所示。定位點處接觸線靜態(tài)拉出值為237 mm,從接觸點沿滑板中心繪制237 mm 直線,如黑色線段,然后拾取黑色線段終點到受電弓中心的距離,如紅色線段。圖中白線表示運動中受電弓的中心線。從圖9 中可以看出受電弓橫向擺動量為32 mm。
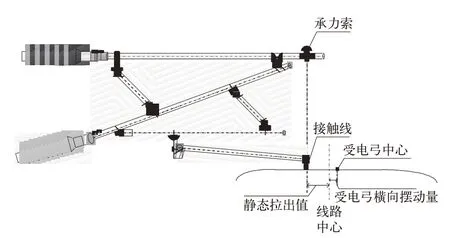
圖8 受電弓橫向擺動量測量方法示意圖

圖9 受電弓橫向擺動量圖像測量結(jié)果
如果車輛平穩(wěn)放置時,考慮受電弓中心線與線路中心線有安裝公差ε,則受電弓橫向擺動量為ΔS+ε。
6 試驗數(shù)據(jù)分析
利用文中方法對復(fù)興號動車組弓網(wǎng)受流參數(shù)進行跟蹤采集,如圖10~圖13 所示。具體試驗過程如下:

圖1 3 CR400 動車組11 車受電弓2 次燃弧測量結(jié)果

圖1 2 CR400 動車組11 車受電弓2 次燃弧測量結(jié)果

圖1 1 CR400 動車組3 車受電弓2 次燃弧測量結(jié)果

圖1 0 CR400 動車組3 車受電弓2 次燃弧測量結(jié)果
試驗要求:對運營里程在80 萬km 以上的動車組弓網(wǎng)受流性能進行追蹤測試
試驗對象:17 輛編組CR400 動車組的2 臺工作受電弓
試驗地點:某高速鐵路線路A 站~B 站區(qū)段上下行線
接觸網(wǎng)高度:5 300 mm
其他要求:追蹤測試數(shù)據(jù)期間,受電弓靜態(tài)工作壓力均在規(guī)定范圍內(nèi)。動車組2 次往返運行交路相同,通過弓網(wǎng)監(jiān)測視頻采集受流數(shù)據(jù)。
一列CR400 動車組2 臺工作受電弓2 次跟蹤測量的數(shù)據(jù)結(jié)果見表1。表中還給出了當天的受電弓靜態(tài)壓力和滑板最小剩余厚度數(shù)據(jù)用于數(shù)據(jù)對比分析。

表1 CR400 服役動車組的受流數(shù)據(jù)跟蹤測試結(jié)果
從表1 中燃弧數(shù)據(jù)對比可以得到以下幾個特點:
(1)通過觀察對比表中數(shù)據(jù),檢測到的受電弓動態(tài)參數(shù)均屬于正常值,靜態(tài)數(shù)據(jù)如受電弓靜態(tài)壓力、滑板最小剩余厚度均在規(guī)定值范圍內(nèi),而且差距極小。
(2)對比弓網(wǎng)燃弧數(shù)據(jù)
被跟蹤的動車組每臺受電弓不同運行方式比較表明,3 車受電弓后弓開口運行優(yōu)于前弓閉口運行,11 車受電弓前弓開口運行優(yōu)于后弓閉口運行。
2 臺同時工作受電弓比較表明,前弓優(yōu)于后弓。
2 臺受電弓不同運行方式下測量結(jié)果表明,11車受電弓作為后弓時的燃弧次數(shù)明顯較多。
(3)圖10~圖13 給出了相同受電弓2 次跟蹤測試結(jié)果的燃弧分布對比圖。從圖中可以看出:
3 車受電弓5 月份測量結(jié)果優(yōu)于1 月份。
11 車受電弓作為前弓時,5 月份測量結(jié)果優(yōu)于1 月份。作為后弓時,5 月份的測量結(jié)果不如1 月份。而且1 月份11 車受電弓滑板厚度已超過最小24 mm 的限值,因此滑板磨耗不是影響弓網(wǎng)燃弧變化的主因。
從目前跟蹤測試結(jié)果和測試數(shù)據(jù)來看,造成被跟蹤動車組的11 車受電弓后弓閉口運行時受流性能較差,這值得更深入研究。
7 結(jié) 論
為了填補國內(nèi)對服役動車組弓網(wǎng)受流性能變化規(guī)律研究的空白,解答車輛部門關(guān)心的動車組受電弓服役性能變化情況,開發(fā)了一套實用的服役動車組弓網(wǎng)受流性能跟蹤測試系統(tǒng),通過車載弓網(wǎng)監(jiān)控視頻離線實測弓網(wǎng)燃弧、受電弓橫向擺動和動態(tài)抬升量參數(shù)。為服役動車組弓網(wǎng)受流性能跟蹤測試提供了技術(shù)支持。該方法具備以下優(yōu)勢:
(1)利用圖像測量參數(shù),數(shù)據(jù)準確,信息豐富,輸出結(jié)果直觀。
(2)通過先驗知識和計算機視覺算法,可以準確地采集燃弧圖像和受電弓動態(tài)包絡(luò)線參數(shù)。
(3)充分利用了車載的弓網(wǎng)監(jiān)控視頻,測量手段安全、經(jīng)濟、實用,大大降低長期跟蹤試驗成本。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00