基于無人機多光譜測繪的輸電線路樹障通道修繕工程面積計算方法
2022-07-20 07:16:18吳亮許國偉范晟方志丹林來鑫
電子測試 2022年13期
吳亮, 許國偉, 范晟, 方志丹, 林來鑫
(廣東電網有限責任公司汕頭供電局,廣東汕頭,515000)
1 領域識別方案設計
在該方案中,分別獲取樹障砍伐前后完整的待識別線路通道的RGB 圖像和多光譜圖像,根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像,根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后的樹障區域圖像,將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中得到樹障砍伐區域圖像。該技術方案,解決了人工丈量樹障砍伐區域效率低下的問題,實現了樹障砍伐區域的自動提取,提高了樹木砍伐區域獲取效率。
1.1 領域識別流程
分別獲取樹障砍伐前后完整的待識別線路通道的RGB圖像和多光譜圖像。根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像。根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后的樹障區域圖像。將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中得到樹障砍伐區域圖像[1]。處理流程如表1 所示。
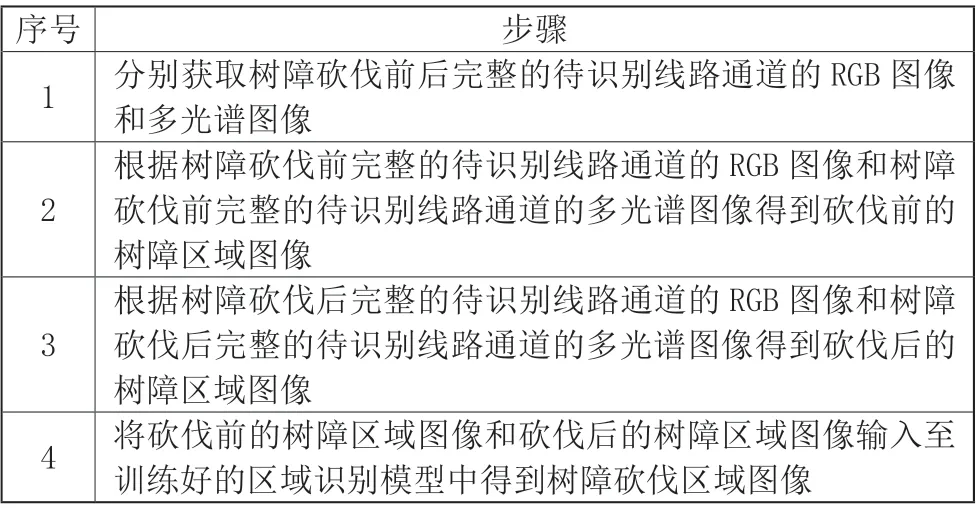
表1 領域識別工作流程
1.2 領域識別用裝置
該裝置主要由圖像獲取模塊組成,用于分別獲取樹障砍伐前后完整的待識別線路通道的RGB 圖像和多光譜圖像,包括砍伐前樹障區域圖像獲取模塊、砍伐后樹障區域圖像獲取模塊、樹障砍伐區域圖像獲取模塊。
砍伐前樹障區域圖像獲取模塊,用于根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像。
砍伐后樹障區域圖像獲取模塊,用于根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后 的樹障區域圖像。
樹障砍伐區域圖像獲取模塊,用于將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中得到樹障砍伐區域圖像。
1.3 領域識別用電子設備
本方案需要使用一種圖像處理用電子設備,該電子設備核心部件是一個或多個處理、存儲裝置。存儲裝置用于存儲一個或多個程序。一個或多個處理器執行一個或多個程序,處理器可實現本方案任意實施例所提供的區域識別方法[2]。
1.4 存儲
本方案需要使用一種計算機可讀存儲介質,其上存儲有計算機程序。其中,該程序被處理器執行時實現具體的區域識別方法。通過分別獲取樹障砍伐前后完整的待識別線路通道的RGB 圖像和多光譜圖像,根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像。根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后的樹障區域圖像。去除RGB 圖像和多光譜圖像中的多余的區域,避免其它區域對識別樹障砍伐區域的影響。將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中得到樹障砍伐區域圖像,解決人工丈量樹障砍伐區域效率低下的問題,最終實現樹障砍伐區域的自動提取,提高樹木砍伐區域獲取效率。
2 方案實施
表1 為本方案實施方式提供的一種區域識別方法的流程。本實施方式可適用于樹障砍伐區域識別的情況,該方法可以由區域識別裝置來執行。
2.1 獲取RGB 圖像和多光譜圖像
分別獲取樹障砍伐前后完整的待識別線路通道的 RGB圖像和多光譜圖像。
通過無人機搭載相機拍攝待識別線路通道樹障砍伐修剪前和修剪后的RGB 圖像和多光譜圖像。多光譜指的是由于太陽光是一種不同波長的連續光譜,其波長分布由短到長。不同顏色的可見光就是因波長差異而呈現出色彩變化。由于不同物體屬性的區別,在接受到太陽光照射時,物體表面吸收與反射太陽光的比例也不盡相同。多光譜圖像更有利于對感興趣區域進行分割。
分別獲取樹障砍伐前后完整的待識別線路通道的RGB圖像和多光譜圖像包括:分別獲取樹障砍伐前后待識別線路通道的RGB 圖像和多光譜圖像;分別對 RGB 圖像和多光譜圖像進行剪裁和拼接得到完整的待識別線路通道的RGB 圖像和完整的待識別線路通道的多光譜圖像。通過無人機搭載 相機拍攝的待識別線路通道樹障砍伐修剪前和修剪后的RGB 圖像和多光譜圖像并不是一張能夠反映完整的待識別線路通道的圖像,而是對待識別線路通道進行了多張圖像的拍攝,需要對拍攝的圖像進行剪裁和拼接,從而獲得樹障砍伐修剪前和修剪后完整的待識別線路通道的圖像,以便后續對樹障砍伐區域進行識別。
2.2 RGB 圖像和多光譜圖像處理
分別對RGB 圖像和多光譜圖像進行剪裁和拼接得到完整的待識別線路通道的RGB 圖像和完整的待識別線路通道的多光譜圖像,包括:根據拍攝得到的RGB 圖像生成RGB 圖像的正射影像;根據拍攝得到的多光譜圖像生成多光譜圖像的正射影像;將RGB 圖像的正射影像進行剪裁和拼接得到完整的待識別線路通道的RGB 圖像;將多光譜圖像的正射影像進行剪裁和拼接得到完整的待識別線路通道的多光譜圖像[3]。
正射影像是具有正射投影性質的遙感影像。原始遙感影像因成像時受傳感器內部狀態變化、外部狀態及地表狀況的影響,均有程度不同的畸變和失真。對遙感影像的幾何處理,不僅提取空間信息,如繪制等高線,也可按正確的幾何關系對影像灰度進行重新采樣,形成新的正射影像。將拍攝得到的RGB 圖像和多光譜圖像生成對應的正射影像,對正射影像進行剪裁和拼接得到完整的待識別線路通道的RGB 圖像和多光譜圖像。正射影像可以提高圖像的精度,更有利于砍伐區域的識別。
2.3 獲取砍伐前樹障區域
根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像。
根據樹障砍伐前完整的待識別線路通道的多光譜圖像進行樹障區域提取,得到砍伐前的樹障區域的多光譜圖像,再結合樹障砍伐前完整的待識別線路通道的RGB 圖像,得到砍伐前的樹障區域圖像。
根據樹障砍伐前完整的待識別線路通道的RGB 圖像和樹障砍伐前完整的待識別線路通道的多光譜圖像得到砍伐前的樹障區域圖像包括:根據樹障砍伐前的待識別線路通道的多光譜圖像得到砍伐前的樹障區域多光譜圖像;根據砍伐前的樹障區域多光譜圖像和樹障砍伐前的待識別線路通道的RGB 圖像得到砍伐前的樹障區域的RGB 圖像。對樹障砍伐前的待識別線路通道的多光譜圖像進行感興趣區域提取,得到砍伐前的樹障區域多光譜圖像。根據砍伐前的樹障區域多光譜圖像對樹障砍伐前的待識別線路通道的RGB 圖像進行圖像分割,得到砍伐前的樹障區域的RGB 圖像。先對多光譜圖像進行感興趣區域提取,得到砍伐前的樹障區域多光譜圖像,再對RGB 圖像進行分割,使得到的砍伐前的樹障區域的RGB圖像更加精確。
2.4 獲取砍伐后的樹障區域
根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后的樹障區域圖像。
根據樹障砍伐后完整的待識別線路通道的多光譜圖像進行樹障區域提取,得到砍伐后的樹障區域的多光譜圖像,再結合樹障砍伐后完整的待識別線路通道的RGB 圖像,得到砍伐后的樹障區域圖像。
根據樹障砍伐后完整的待識別線路通道的RGB 圖像和樹障砍伐后完整的待識別線路通道的多光譜圖像得到砍伐后的樹障區域圖像包括:根據樹障砍伐后的待識別線路通道的多光譜圖像得到砍伐后的樹障區域多光譜圖像;根據砍伐后的樹障區域多光譜圖像和砍伐后的待識別線路通道的RGB 圖像得到砍伐后的樹障區域的RGB 圖像。對樹障砍伐后的待識別線路通道的多光譜圖像進行感興趣區域提取,將無用的干擾區域過濾掉,得到砍伐后的樹障區域多光譜圖像。根據砍伐后的樹障區域多光譜圖像對砍伐后的待識別線路通道的RGB 圖像進行圖像分割,在砍伐后的待識別線路通道的RGB圖像中提取與砍伐后的樹障區域多光譜圖像相同的區域,得到砍伐后的樹障區域多光譜圖像[4]。
2.5 輸入區域識別模型獲得樹障砍伐區域圖像
將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中得到樹障砍伐區域圖像。
將分割得到的砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的區域識別模型中,進行線路通道樹障砍伐前和砍伐后的識別,得到樹障砍伐區域圖像。
區域識別模型為DeepLabv3+模型。DeepLabv3+模型訓練時使用的圖片格式與待識別線路通道的圖片格式一致。可以通過遷移學習對DeepLabv3+模型進行訓練,還可以基于深度學習進行訓練。示例性的,基于地物分類遙感影像對DeepLabv3+模型進行訓練,拿到特征提取層的訓練參數,遷移到砍伐倒伏數據集訓練中,得到區域識別模型。將砍伐前的樹障區域圖像和砍伐后的樹障區域圖像輸入至訓練好的DeepLabv3+模型中進行樹障砍伐區域識別,得到精準的樹障砍伐區域[5]。
3 總結
本文所提出的樹障區域識別方案去除了RGB 圖像和多光譜圖像中的多余的區域,避免其它區域對識別樹障砍伐區域的影響,可解決人工丈量樹障砍伐區域效率低下的問題,實現高精度的樹障砍伐區域的自動提取,提高樹木砍伐區域獲取效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52