基于ADS-B的飛行數(shù)據(jù)采集處理系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2022-07-22 08:31:50吳春林藍(lán)德威李寶鵬
火控雷達(dá)技術(shù) 2022年2期
吳春林 陳 勇 邵 紅 藍(lán)德威 李寶鵬
(1.海軍航空大學(xué)青島校區(qū) 山東青島 266041;2.海軍裝備部重大專項(xiàng)裝備項(xiàng)目管理中心 北京 100000;3.解放軍92074部隊(duì) 浙江寧波 315000)
0 引言
ADS-B (Automatic Dependent Surveillance-Broadcast, 廣播式自動(dòng)相關(guān)監(jiān)視)[1]是一種基于全球衛(wèi)星定位系統(tǒng)和利用空地、空空數(shù)據(jù)鏈實(shí)現(xiàn)交通監(jiān)控和信息傳遞的空管監(jiān)視新技術(shù),它充分融合了通信、定位和導(dǎo)航等多種現(xiàn)代信息技術(shù)。裝備了ADS-B設(shè)備的飛機(jī),可通過數(shù)據(jù)鏈向地面和機(jī)載接收機(jī)廣播準(zhǔn)確的飛機(jī)位置、速度等實(shí)時(shí)信息,在增強(qiáng)飛行員、管制員風(fēng)險(xiǎn)洞察能力,以及提升整體航空交通安全水平方面發(fā)揮著重要作用[2]。因此,深入研究ADS-B技術(shù)在提升民用航空交通安全水平方面有著重要意義。
針對(duì)ADS-B技術(shù)在航空監(jiān)視中的廣泛應(yīng)用[3],本文設(shè)計(jì)并實(shí)現(xiàn)了一種基于ADS-B的數(shù)據(jù)采集處理系統(tǒng),該系統(tǒng)的主要特點(diǎn)如下:
1)該系統(tǒng)通過采集并處理目標(biāo)的4維位置信息(經(jīng)度、緯度、高度和時(shí)間),能夠形成清晰、直觀的二維背景地圖和探測(cè)目標(biāo)的航跡以及交通態(tài)勢(shì)分布。
2)該系統(tǒng)通過對(duì)所采集的ADS-B數(shù)據(jù)進(jìn)行冗余點(diǎn)檢測(cè)刪除、漏點(diǎn)檢測(cè)修正以及異常點(diǎn)識(shí)別剔除等數(shù)據(jù)優(yōu)化處理,使得優(yōu)化后的數(shù)據(jù)能夠更為直觀、準(zhǔn)確地反映出探測(cè)目標(biāo)的航行數(shù)據(jù)。
3)該系統(tǒng)能夠?qū)⑻綔y(cè)目標(biāo)數(shù)據(jù)進(jìn)行存儲(chǔ)記錄,從而可以實(shí)時(shí)重放全部目標(biāo)的航跡數(shù)據(jù)記錄,并以偽雷達(dá)畫面實(shí)時(shí)顯示在二維背景地圖中。
系統(tǒng)在設(shè)計(jì)時(shí)以獲得準(zhǔn)確的飛行航跡為目標(biāo),以數(shù)據(jù)信息獲取和處理為核心,實(shí)現(xiàn)了對(duì)ADS-B信息數(shù)據(jù)的采集、優(yōu)化和顯示功能,為飛機(jī)航行數(shù)據(jù)的分析和研究提供了可靠支撐。
1 總體設(shè)計(jì)
ADS-B數(shù)據(jù)的發(fā)送和接收處理過程如圖1所示,機(jī)載ADS-B發(fā)射機(jī)廣播信號(hào),基于ADS-B的數(shù)據(jù)采集處理系統(tǒng)完成ADS-B數(shù)據(jù)信息的接收、處理和顯示。該系統(tǒng)主要分為三個(gè)模塊:
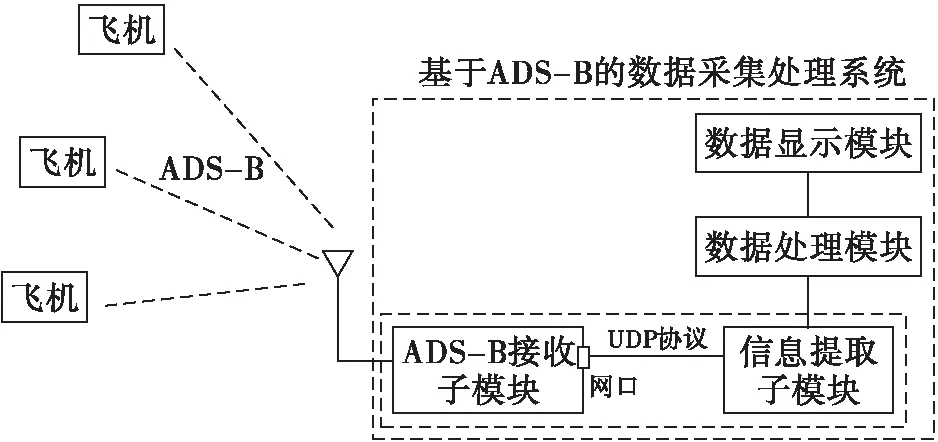
圖1 ADS-B數(shù)據(jù)的發(fā)送和接收處理過程
1) 數(shù)據(jù)采集模塊:由ADS-B接收子模塊和信息提取子模塊構(gòu)成,以實(shí)現(xiàn)ADS-B數(shù)據(jù)信息的解析、有用信息的提取和存儲(chǔ)。
2) 數(shù)據(jù)處理模塊:對(duì)數(shù)據(jù)采集模塊傳過來的數(shù)據(jù)進(jìn)行冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)處理,并將處理后的數(shù)據(jù)存儲(chǔ)在數(shù)據(jù)庫(kù)中。
3) 數(shù)據(jù)顯示模塊:將從數(shù)據(jù)采集模塊獲得的原始數(shù)據(jù)信息和從數(shù)據(jù)處理模塊得到的處理后數(shù)據(jù)信息進(jìn)行顯示,以便于飛行航跡和航班信息的直觀展示。
2 數(shù)據(jù)采集模塊
該模塊主要完成ADS-B信號(hào)的接收和ADS-B信號(hào)中有用數(shù)據(jù)信息的提取。其中信息提取的關(guān)鍵是對(duì)ADS-B數(shù)據(jù)幀結(jié)構(gòu)有充分的理解,下面就對(duì)其進(jìn)行介紹。
ADS-B數(shù)據(jù)幀由多個(gè)ADS-B數(shù)據(jù)塊組成,每個(gè)數(shù)據(jù)塊包含各個(gè)域值[4-5],如圖2所示。由圖2可知,單條ADS-B報(bào)告共14字節(jié),112Bit。一般來說該報(bào)告被分為5個(gè)大的數(shù)據(jù)塊。在數(shù)據(jù)采集模塊中,我們主要使用的是ADS-B幀的ICAO地址域和ME消息域數(shù)據(jù)信息。ICAO地址域是單條ADS-B報(bào)告的Bit9-Bit32,共24個(gè)比特位,對(duì)同一航空器而言ICAO地址域具有唯一性;ME消息域是單條ADS-B報(bào)告的Bit33-Bit88,共56個(gè)比特位,該域包含航空器的諸多元素項(xiàng)。
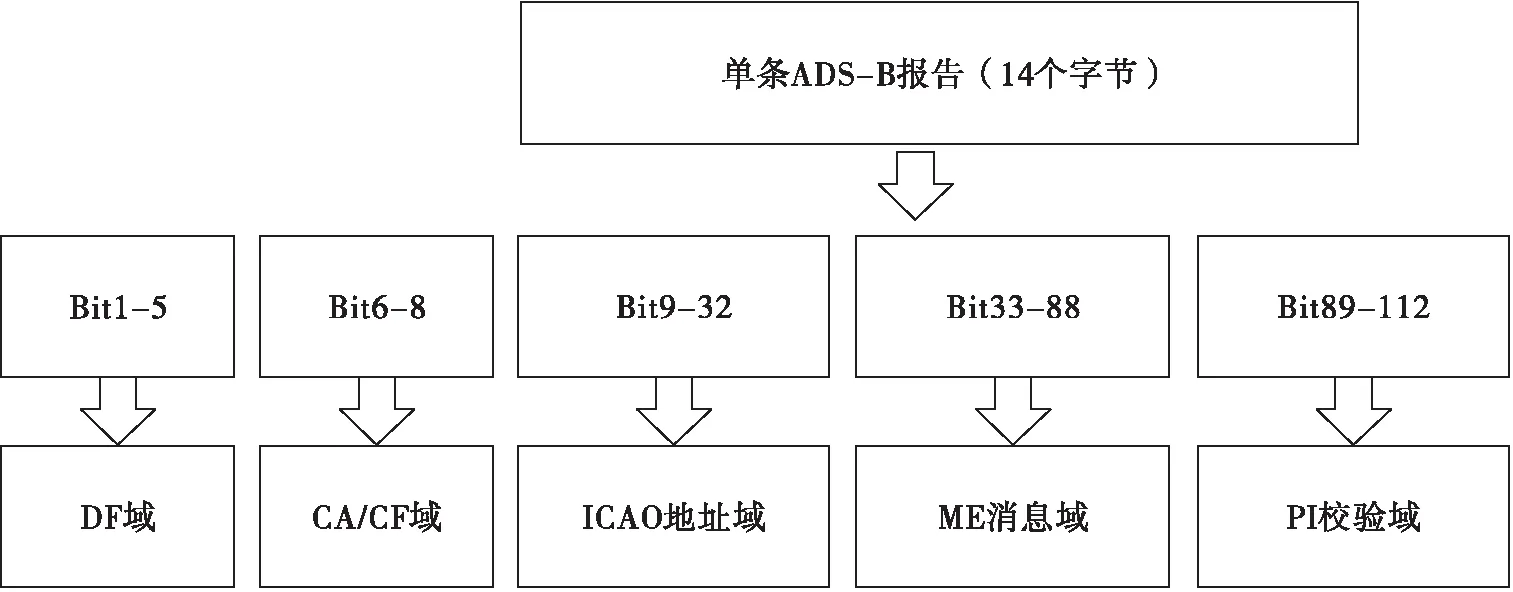
圖2 軟件設(shè)計(jì)方案
在接收到的ADS-B信號(hào)進(jìn)入數(shù)據(jù)采集模塊后,該模塊就會(huì)從ICAO地址域和ME消息域中獲取飛機(jī)的ICAO域代碼、所處位置的經(jīng)緯度、飛行高度等系統(tǒng)后續(xù)處理所需要的數(shù)據(jù),隨后將上述信息傳入數(shù)據(jù)處理模塊并存入數(shù)據(jù)庫(kù)中。
3 數(shù)據(jù)處理模塊
在ADS-B數(shù)據(jù)信息傳輸過程中,由于傳輸損耗、地形阻擋和電磁干擾等因素的影響, ADS-B接收子模塊接收到的數(shù)據(jù)信息可能會(huì)存在很多錯(cuò)誤,例如出現(xiàn)冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)等。因此,為了正確顯示航班信息和飛行航跡,必須對(duì)接收到的ADS-B數(shù)據(jù)信息數(shù)據(jù)進(jìn)行處理,來盡可能消除前述錯(cuò)誤[6-7]。
3.1 數(shù)據(jù)信息冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)處理
本系統(tǒng)對(duì)數(shù)據(jù)信息冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)這三種典型的數(shù)據(jù)錯(cuò)誤點(diǎn)都進(jìn)行了處理,數(shù)據(jù)處理流程如圖3所示,并予以描述。
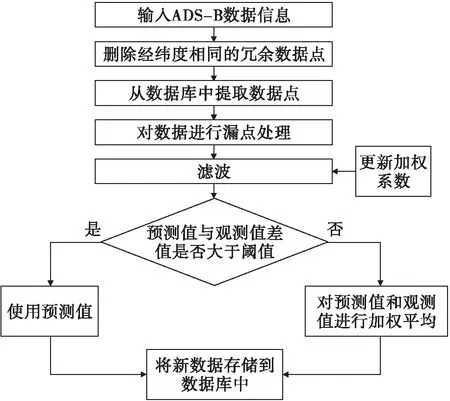
圖3 數(shù)據(jù)處理流程圖
1)數(shù)據(jù)輸入:將采集的ADS-B數(shù)據(jù)輸入到數(shù)據(jù)處理模塊。
2)冗余點(diǎn)處理:系統(tǒng)采集的ADS-B數(shù)據(jù)中可能會(huì)存在多個(gè)含有相同信息的數(shù)據(jù)點(diǎn),即冗余點(diǎn)。這些點(diǎn)不能提供有用信息,反而會(huì)額外占用系統(tǒng)的存儲(chǔ)和計(jì)算資源。因此,在對(duì)數(shù)據(jù)信息進(jìn)行處理時(shí),首先要進(jìn)行冗余點(diǎn)處理,即將經(jīng)緯度信息相同的多余數(shù)據(jù)點(diǎn)刪除。
3)數(shù)據(jù)提取:遍歷數(shù)據(jù)庫(kù)提取滿足要求的數(shù)據(jù)點(diǎn)。
4)漏點(diǎn)處理:主要是在遍歷數(shù)據(jù)庫(kù)時(shí),通過插值法對(duì)缺失的數(shù)據(jù)進(jìn)行插值處理。具體實(shí)現(xiàn)方法為:當(dāng)存在兩個(gè)時(shí)間間隔大于一秒的數(shù)據(jù)點(diǎn)時(shí),認(rèn)定這兩個(gè)數(shù)據(jù)點(diǎn)之間存在漏點(diǎn)。根據(jù)兩點(diǎn)之間的時(shí)間間隔以及經(jīng)緯度、飛行高度等數(shù)據(jù)的差值,計(jì)算出插值所需的增量信息,再進(jìn)行插值處理。
5)濾波處理:主要是通過跟蹤濾波來計(jì)算數(shù)據(jù)點(diǎn)的預(yù)測(cè)值,用于后續(xù)異常點(diǎn)的處理,每一次數(shù)據(jù)點(diǎn)處理都要通過α-β濾波來計(jì)算預(yù)測(cè)值并且更新迭代系數(shù)。
6)異常點(diǎn)處理:主要是通過預(yù)測(cè)值與觀測(cè)值之間的差值來處理。兩者差值較大時(shí),說明觀測(cè)值失真需要剔除;差值較小時(shí),將兩個(gè)數(shù)據(jù)按照系數(shù)進(jìn)行加權(quán)。
7)數(shù)據(jù)儲(chǔ)存:將處理完成的新數(shù)據(jù)信息存儲(chǔ)至數(shù)據(jù)庫(kù)中。
3.2 跟蹤濾波
為了盡可能得到準(zhǔn)確的飛行航線,在對(duì)ADS-B數(shù)據(jù)進(jìn)行處理時(shí),該系統(tǒng)還需要進(jìn)行航跡跟蹤計(jì)算,即通過當(dāng)前接收的ADS-B數(shù)據(jù)來對(duì)下一時(shí)刻目標(biāo)的位置進(jìn)行預(yù)測(cè),其主要步驟包括平滑計(jì)算和外推計(jì)算。平滑計(jì)算是對(duì)目標(biāo)的當(dāng)前坐標(biāo)進(jìn)行估計(jì),以得到當(dāng)前時(shí)刻坐標(biāo)的平滑值;外推計(jì)算是對(duì)目標(biāo)的外推坐標(biāo)進(jìn)行估計(jì),以得到下一時(shí)刻坐標(biāo)的預(yù)測(cè)值。需要說明的是,第3.1節(jié)異常點(diǎn)處理采用的是預(yù)測(cè)值。
在上述平滑計(jì)算和外推計(jì)算中,通常采用α-β濾波器或Kalman濾波器[8-9]。α-β濾波器是一種可用于狀態(tài)估計(jì)、數(shù)據(jù)平滑的濾波器;與Kalman濾波器相比,α-β濾波不依賴系統(tǒng)的具體模型,使用簡(jiǎn)單,且能使系統(tǒng)始終保持對(duì)目標(biāo)的連續(xù)跟蹤。因此,考慮到計(jì)算復(fù)雜度和跟蹤性能。
本文在進(jìn)行航跡跟蹤計(jì)算時(shí)采用了α-β濾波器,其實(shí)現(xiàn)框圖如圖4所示。
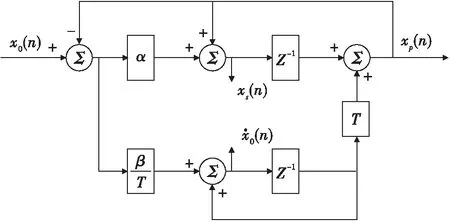
圖4 α-β濾波器框圖
(1)
濾波器的初始條件為

(2)
由圖4和式(1)可知,α是預(yù)測(cè)值和觀測(cè)值差值的加權(quán)系數(shù)。當(dāng)α=0時(shí),平滑值等于預(yù)測(cè)值;當(dāng)α=1時(shí),平滑值等于觀測(cè)值;當(dāng)0<α<1時(shí),平滑值等于預(yù)測(cè)值和觀測(cè)值的加權(quán)結(jié)果。β對(duì)速度值的平滑作用類似。
4 數(shù)據(jù)顯示模塊
在該數(shù)據(jù)采集處理系統(tǒng)中,由于同一ADS-B信號(hào)攜帶的數(shù)據(jù)信息在數(shù)據(jù)庫(kù)中存在兩種不同形式,即原始ADS-B數(shù)據(jù)信息和經(jīng)處理后的ADS-B數(shù)據(jù)信息。因此,本文在該系統(tǒng)的數(shù)據(jù)顯示模塊中,設(shè)計(jì)了實(shí)時(shí)數(shù)據(jù)和和數(shù)據(jù)分析兩種顯示模式。
4.1 實(shí)時(shí)數(shù)據(jù)顯示模式
實(shí)時(shí)數(shù)據(jù)顯示模式使用原始ADS-B數(shù)據(jù),該數(shù)據(jù)是直接從ADS-B接收子模塊中采集得到的,不經(jīng)過數(shù)據(jù)處理模塊而直接傳至數(shù)據(jù)顯示模塊。在該模式下,可以做到對(duì)飛機(jī)飛行航線和航班信息的實(shí)時(shí)顯示,但可能會(huì)存在冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)的情形,導(dǎo)致最終形成的飛行航跡和航班信息部分丟失或者發(fā)生錯(cuò)誤。
圖5和圖6分別為數(shù)據(jù)顯示模塊中飛行航線及航班信息的顯示界面。從圖5可以看出,數(shù)據(jù)采集處理系統(tǒng)共監(jiān)測(cè)到5架民航飛機(jī),按照民航飛機(jī)與數(shù)據(jù)采集點(diǎn)的遠(yuǎn)近,其ICAO代碼分別為781A9B、780FOF、78095F、780713和780DAC,與每架飛行關(guān)聯(lián)的緯度、經(jīng)度、高度、距離和接收時(shí)間信息在圖6中得到了展示。
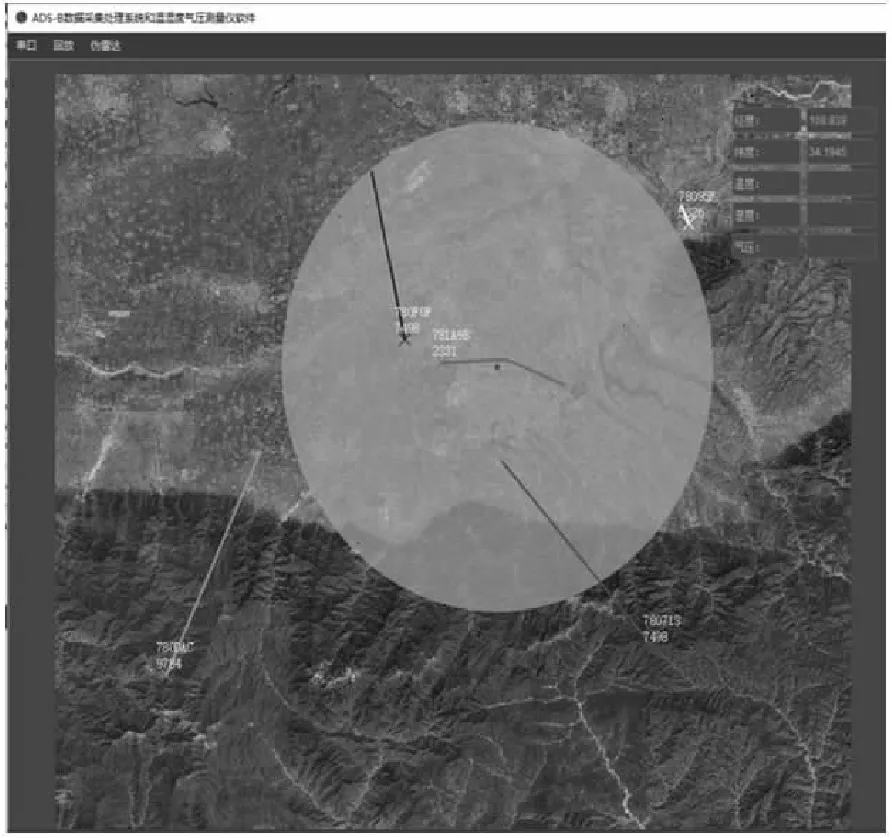
圖5 飛行航線顯示界面

圖6 航班信息顯示界面
4.2 數(shù)據(jù)分析顯示模式
數(shù)據(jù)分析顯示模式使用經(jīng)處理后的ADS-B數(shù)據(jù)信息,該數(shù)據(jù)經(jīng)過數(shù)據(jù)處理模塊的處理后,再傳至數(shù)據(jù)顯示模塊。在該模式下,由于經(jīng)處理后,原數(shù)據(jù)中的冗余點(diǎn)、漏點(diǎn)和異常點(diǎn)現(xiàn)象被清除,因此可以得到優(yōu)化后的飛行航線和航班信息,從而對(duì)飛機(jī)航行數(shù)據(jù)進(jìn)行更精確的分析。
5 系統(tǒng)運(yùn)行及分析
本系統(tǒng)在實(shí)際的民航ADS-B環(huán)境下進(jìn)行了多次測(cè)試。具體測(cè)試中,我們?cè)跂|經(jīng)108.832384°,北緯34.0224204°處1200m高的山上進(jìn)行該系統(tǒng)的ADS-B數(shù)據(jù)接收測(cè)試,飛行數(shù)據(jù)測(cè)試結(jié)果如圖6所示。在圖7中,系統(tǒng)接收機(jī)與飛機(jī)間距離大于400km,得到了民航飛機(jī)的4維位置信息,并且數(shù)據(jù)間隔也基本在1s以內(nèi),實(shí)現(xiàn)了對(duì)飛機(jī)航行信息的采集處理。在多次實(shí)地測(cè)試中,我們主要考慮接收到的ADS-B信號(hào)的實(shí)時(shí)性和準(zhǔn)確性指標(biāo),從得到的飛機(jī)航班信息的實(shí)時(shí)數(shù)據(jù)顯示結(jié)果和數(shù)據(jù)分析顯示結(jié)果可以看出,此系統(tǒng)在實(shí)時(shí)性和準(zhǔn)確性方面都有著優(yōu)異的性能。
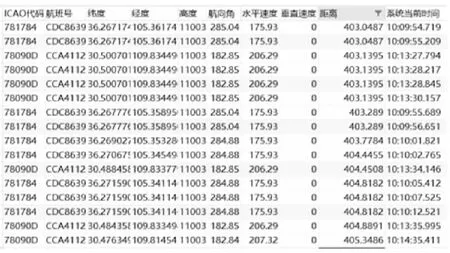
圖7 1200m ADS-B接收數(shù)據(jù)
6 結(jié)束語
相對(duì)于傳統(tǒng)的數(shù)據(jù)采集處理系統(tǒng),本文提出的基于ADS-B的數(shù)據(jù)采集處理系統(tǒng)從ADS-B的幀結(jié)構(gòu)出發(fā),通過對(duì)ADS-B信號(hào)進(jìn)行數(shù)據(jù)采集、處理和顯示,不僅可以實(shí)時(shí)顯示飛機(jī)的飛行航線和航班信息,還可以通過對(duì)ADS-B數(shù)據(jù)進(jìn)行處理得到完整的、準(zhǔn)確的飛機(jī)航線和航班信息。這些數(shù)據(jù)信息不僅對(duì)民航中的飛行管制有所幫助,還對(duì)我國(guó)未來新航行系統(tǒng)的建設(shè)有著一定的參考價(jià)值。
猜你喜歡
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
中華手工(2017年2期)2017-06-06 23:00:31
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
中國(guó)慣性技術(shù)學(xué)報(bào)(2015年1期)2015-12-19 13:12:17
中外會(huì)展(2014年4期)2014-11-27 07:46:46
測(cè)繪科學(xué)與工程(2013年3期)2013-03-11 15:07:36