基于累積幀間差分法和掩膜的SF6紅外檢漏視頻定位算法研究
2022-07-22 05:23:08鄧劍平
電氣技術 2022年7期
關鍵詞:區域
黃 柏 楊 帆 鄧劍平 畢 凡
基于累積幀間差分法和掩膜的SF6紅外檢漏視頻定位算法研究
黃 柏 楊 帆 鄧劍平 畢 凡
(廣州供電局有限公司電力試驗研究院,廣州 510410)
自動化、智能化是變電站發展的趨勢,越來越多的自動巡檢機器人被應用于巡檢工作中。紅外圖像檢漏技術是常用的電氣設備SF6氣體檢漏手段,既可以針對局部查找漏點,又可以快速大范圍巡檢。因此,對紅外檢漏自動定位算法的研究有其必要性。本文研究一種SF6紅外檢漏視頻定位算法,它既可用于變電站自動巡檢機器人的紅外檢漏自動定位,亦可用于手持式紅外圖像檢漏儀輔助定位。首先將紅外圖像灰度化,并利用高斯模糊技術消除噪聲干擾;其次通過閾值變換在首幀圖像中識別設備區域,得到掩膜;然后基于漏點位置相對固定且持續的特性,使用累積幀間差分法獲取紅外圖像的累積變化;最后根據掩膜排除不在設備區域的干擾,對SF6泄漏點進行定位和統計。實驗表明,該算法能準確定位SF6漏點位置,運算速度快且抗干擾性好。
紅外圖像;SF6;累積幀間差分法;掩膜;漏點定位
0 引言
SF6是一種無色、無味的惰性氣體,因良好的絕緣和滅弧性能,在氣體絕緣金屬封閉開關設備(gas insulated switchgear, GIS)等高壓電氣設備中得到廣泛的應用[1-2]。SF6氣體泄漏是造成此類電氣設備失效的主要原因[3]。相比于傳統的包扎法、肥皂法、手持式檢漏儀定性檢漏法,紅外帶電檢漏技術不需要停電作業、不用接觸電氣設備,是一種更為便捷安全且直觀有效的檢漏手段[4]。
紅外線泄漏檢測技術是利用SF6氣體與空氣的紅外輻射特性實現的。SF6泄漏會向外輻射紅外線能量,對周邊環境造成一定的影響,在使用紅外成像技術進行成像時,通過分析對比SF6氣體與空氣紅外圖像的差異,就能實時、精確地探測出SF6泄漏點,并生成直觀的紅外圖像。
隨著變電站自動化和智能化水平的不斷提高,變電站巡檢機器人逐漸取代人工巡檢成為今后的發展方向[5]。紅外圖像檢測儀是巡檢機器人搭載的重要監測設備之一。目前,關于紅外圖像處理的研究主要集中在紅外測溫領域[6],通過圖像處理、智能識別等算法對紅外測溫圖像中的設備進行識別,并找出故障設備。在生產中,紅外檢漏仍主要依賴人眼判斷,相關研究主要集中在檢測效果的加強方法方面[7]。基于圖像處理的紅外檢漏方法屬于運用運動目標圖像的定位算法,主要分為幀間差分法[8]、背景差分法[9]、光流法[10]。本文研究一種基于圖像處理的紅外檢漏定位算法,使用閾值變換分割設備區域與背景區域,基于SF6泄漏點的紅外圖像特性使用累積幀間差分法來實現漏點定位。
1 圖像預處理
1.1 灰度化
每個紅外圖像均為RGB彩色圖像,每個像素均包含紅(R)、綠(G)、藍(B)三部分。由于漏點識別主要和亮度有關,故為了降低對計算機硬件、軟件性能的要求,將彩色圖像進行灰度化處理。圖像灰度化是指將一張彩色照片的亮度分為0到255個級別,0為全黑色,255為全白色。彩色圖片灰度化的方法為[11]

式中,Y為亮度。圖片灰度化處理效果如圖1所示。
1.2 高斯模糊
由于后續檢漏定位的算法對圖片變化較為敏感,為了減少環境和拍攝者動作對圖像造成的干擾,對每一幀灰度化后的圖像進行高斯模糊處理。高斯模糊是一種通過高斯分布來減小圖像雜散程度和細節層次的方法[12],其計算公式為

式中:x和y為坐標值;為濾鏡半徑。高斯模糊效果如圖2所示。
1.3 圖像掩蔽
圖像掩蔽是指對所處理的圖像(全部或局部)進行遮蔽,以控制圖像處理的范圍或過程。在漏點識別定位中,SF6漏點只存在于設備區,通過劃分設備區域和背景區域可以有效排除外界干擾。假設單次定位中紅外攝像儀拍攝位置變化不大,使用閾值法[9]對視頻的首幀圖像劃分設備區域與背景區域。在紅外圖片中,一般帶電電氣設備區域比背景區域亮度要高。閾值法是一種簡便、高效的圖像分割方法,它把圖像上灰度高于限值的點設為全白色,其他點設為全黑色。這樣,截圖就變成一張黑白相間的圖片,圖片中白色的部分則為設備部分。
由于SF6氣體泄漏是一種擴散運動,這種運動往往會稍超出設備區域,故使用圖像形態學膨脹[9]操作留出一定裕度,將其稱為掩膜。對于遠處有干擾的情況,還可以采取圖像形態學腐蝕[12]操作后再膨脹進行消減。掩膜的過程如圖3所示。圖3(c)通過腐蝕除去零散的不在設備區域的白色部分,再經過膨脹最終得到的掩膜如圖3(d)所示。
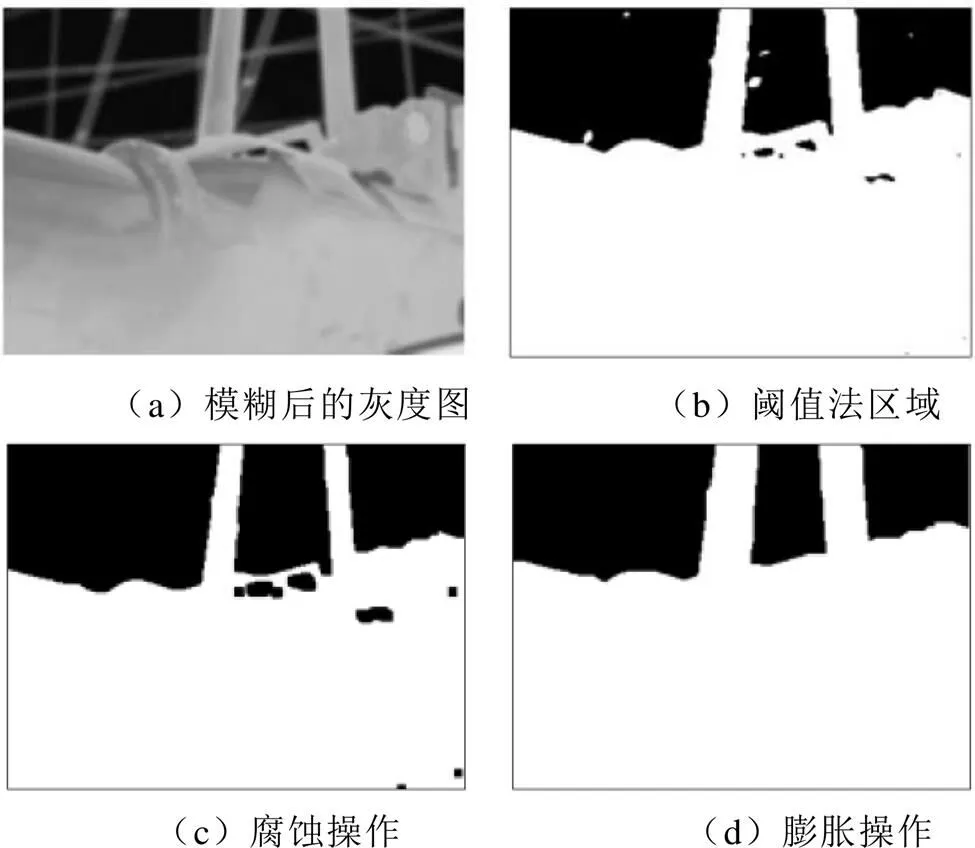
圖3 掩膜過程
2 基于累積幀間差分的漏點定位算法
2.1 SF6泄漏紅外圖像特點及抗干擾分析
SF6氣體泄漏在紅外視頻中是一種局部漸變的運動,其相對位置變化不大,且持續時間貫穿整個拍攝區間。由于變電站的相對封閉性,紅外視頻可能存在的干擾有飛鳥、附近高樓的燈光、變電站工作人員、攝像機位置的微小變化等。利用泄漏位置相對固定且持續時間長的特性,選用累積幀間差分法可以將這些干擾排除。對于不在設備上的干擾,可以通過圖像預處理步驟中的掩膜進行區分。同時,高斯模糊和累積幀間差分法也能有效減少攝像機位置微小變化帶來的干擾。
2.2 累積幀間差分法
幀間差分法[13]是一種利用對連續兩幀圖像進行差分運算得到運動物體輪廓的新算法。在差分操作中,去除不會改變的背景,獲得相對移動的區域,并根據該區域和閾值的相對大小來判定該區域的移動特征。通過閾值提取序列圖像中運動變化的區域,第幀圖像的灰度值I(,)與第+1幀圖像的灰度值I+1(,)之間的變化差值可以表示為

式中:(,) 為運動目標在圖像中的位置;為閾值。
該方法的編程簡單,對光照和其他場景的變化不敏感,能很好地適應各種動態的環境,具有很好的穩定性[14]。然而,傳統的幀間差分法只能處理單個幀的差分圖,不能反映出SF6泄漏的相對位置和較長的相對位置,而且易被白噪聲、脈沖噪聲(飛鳥、移動的人、攝像機的自然抖動等)影響。為了提高SF6泄漏的定位精度,本文提出一種累積幀間差分法。
假設100幀是一個測試序列,對輸入視頻的圖像進行幀間差分和差分累加運算,總共執行99次差分操作。因此,累積的圖像像素值介于[0, 99]。實驗證明,累加圖像的門限A以40為宜。累積幀間差分法的計算公式為

式中:(,)為運動目標在圖像中的位置;A為閾值;=99;D(,)為第幀和+1幀圖像差分;(,)為累積差分;(,)為二值化后的最終結果。
圖4為單幀差分和累積幀間差分對比,由圖4(b)可見,單幀差分容易受到噪聲干擾,而圖4(c)的累積差分白色部位相對集中,抗干擾能力較好。
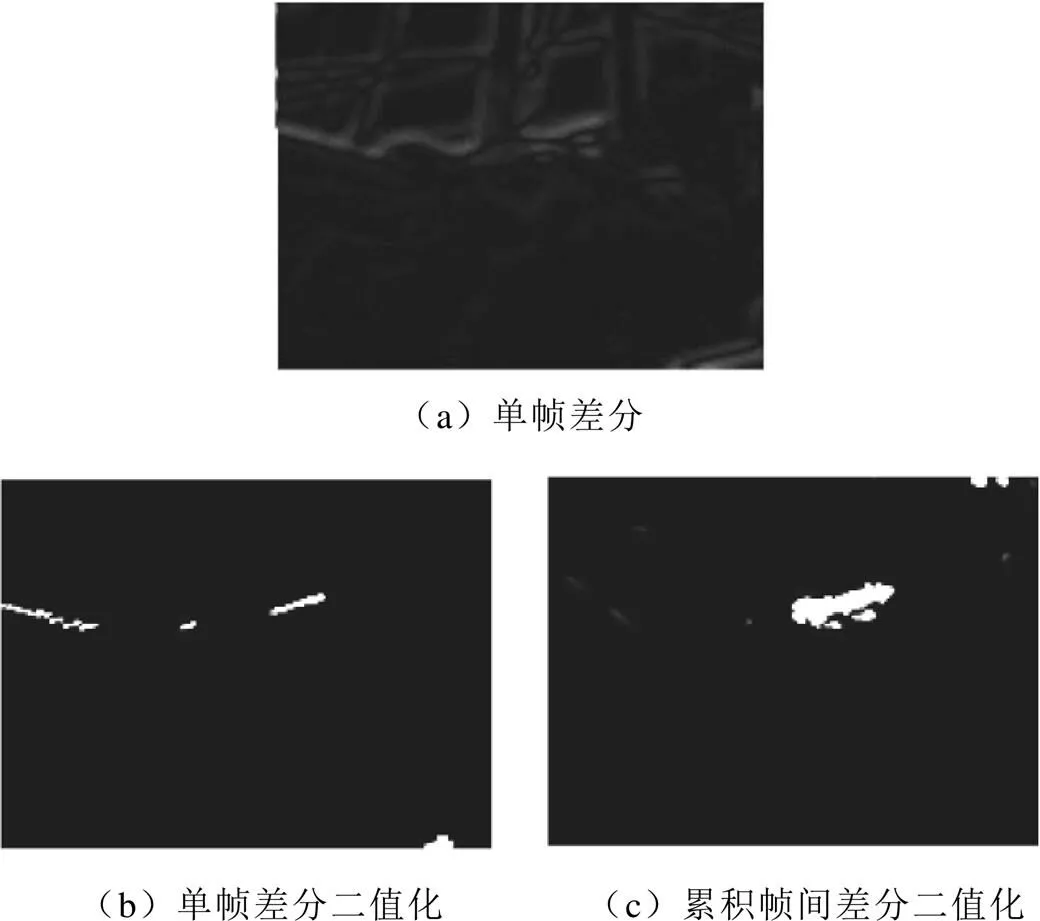
圖4 單幀差分與累積幀間差分
2.3 漏點定位及統計
上述所得圖像中白色的部位即為可能的漏點區域,為排除非設備區域的干擾,將累加圖像與1.3節得到的掩膜進行式(6)所示的與操作,得到在設備區域的漏點區域[15]。

式中:(,)為式(5)累積差分二值化的結果;(,)為1.3節中得到的掩膜。最后使用邊緣檢測[12]找出圖中輪廓,去除較小的輪廓并合并距離較近的輪廓,得到漏點位置并統計漏點個數。程序以100幀圖像為一個測試序列,不斷重復循環實時定位,單個循環的流程如圖5所示。
3 實驗驗證
實驗使用的計算機為CPU i3@2.00GHz,2GB內存,系統環境為Windows7,編程語言Python2.7,圖像處理軟件為OpenCV3.0.本實驗采用FLIR公司的GF306紅外探測器拍攝紅外視頻,幀速為15幀/s,分辨率為320×240。截取五段紅外視頻,各自進行循環定位,結果均能正確定位。算法的處理性能見表1,由表1處理速度得知,該算法能處理50幀/s的紅外視頻,滿足實時視頻處理的要求。

圖5 單個循環流程

表1 算法的處理性能
圖6為某段視頻中的某次循環定位,可以看到圖6(b)的累積差分右上方有兩處白點干擾,通過和掩膜進行與操作后只留下設備區域內的白色部分如圖6(c)所示,最終定位結果如圖6(d)所示。

圖6 定位案例
運動目標圖像定位算法主要分為差分法和光流法[16-17]。光流法運算復雜度高,對幀間位移較大的目標有更好的檢測效果;傳統的背景差分法運算復雜度低,但無法實時更新背景,容易受到背景突發變化的干擾;本文的累積幀間差分法對光線等場景變化不太敏感,能夠適應各種動態環境,穩定性較好。對三種方法的運算速度進行測試,結果見表2。

表2 差分法和光流法運算速度對比
由表2可知,兩種差分法處理速度遠快于光流法。在準確率方面,光流法對位移較小的目標不敏感,對5段紅外視頻,可以準確識別出2段視頻中的漏點,正確率僅為40%;傳統的背景差分法無法實時更新背景,對5段測試視頻的準確識別率為80%,但無法識別中途闖入鏡頭的干擾物;本文的累積幀間差分法對5段測試視頻的識別率為100%,且能區分人為設置的中途入鏡的干擾物。因此,相比于光流法,差分法更適用于紅外檢漏視頻定位。但由于驗證的視頻樣本數量有限,本文的驗證結果有一定局限性。
4 結論
本文根據SF6泄漏點在紅外圖像中相對位置固定且持續時間長這一特點,提出一種基于累積幀間差分和掩膜的定位方法。通過實驗分析,得出以下結論:
1)該方法處理速度快,抗干擾性好,適合實時視頻處理,既可用于變電站自動巡檢機器人的紅外檢漏自動定位,亦可用于手持式紅外圖像檢漏儀輔助定位。
2)高斯模糊和幀間差分對消除攝像機抖動的干擾效果明顯;設備區域和背景區域劃分可以有效區分非設備區的干擾。
3)該方法對視頻拍攝的平穩程度有一定要求,大幅度的抖動會造成較大干擾;另外,雨天對該方法的干擾尚未經過實驗測試。
4)下一步可以充分挖掘SF6泄漏紅外圖像的紋理特征、幾何特征、動態特征等,使用貝葉斯分類、神經網絡等算法來識別這些特征,或許能有更一步的改進。
[1] 劉財明. 氣體絕緣開關設備局部放電帶電檢測綜合應用[J]. 電氣技術, 2020, 21(10): 117-122.
[2] 潘巖, 章海斌, 馬凱, 等. 一起GIS傳動失效導致的接地故障原因及分析[J]. 安徽電氣工程職業技術學院學報, 2021, 26(2): 36-40.
[3] 陳振生. GIS高壓電器SF6氣體密度、濕度及泄漏檢測技術[J]. 電氣技術, 2007, 8(4): 16-20.
[4] 馬鳳翔, 袁小芳, 程登峰, 等. 基于紅外吸收原理的SF6氣體泄漏檢測技術應用研究[J]. 電氣技術, 2021, 22(10): 51-56.
[5] SONG Yifeng, WANG Hongguang, ZHANG Jianwei. A vision-based broken strand detection method for a power-line maintenance robot[J]. IEEE Transactions on Power Delivery, 2014, 29(5): 2154-2161.
[6] 李玉齊, 朱琦文, 張健. 發電廠帶電設備紅外檢測與故障診斷應用研究[J]. 電氣技術, 2020, 21(1): 78-82, 85.
[7] 許侃, 高凱, 鄧先欽, 等. 極端環境下SF6氣體紅外熱成像檢漏技術在GIS帶電檢測中的效果加強方法研究[J]. 高壓電器, 2021, 57(3): 191-197.
[8] 王建平, 李俊山, 楊亞威, 等. 基于紅外成像的乙烯氣體泄漏檢測[J]. 液晶與顯示, 2014, 29(4): 623-628.
[9] 肖欣怡. 紅外成像氣體檢漏儀軟件設計[D]. 武漢: 華中科技大學, 2019.
[10] 吳春龍, 潘海鵬, 夏永明. 基于光流法的氣密性檢測裝置研究[J]. 機電工程, 2013, 30(8): 947-951.
[11] 楊帆. 數字圖像處理與分析[M]. 北京: 北京航空航天大學出版社, 2007.
[12] BRADSKI G R, KAEHLER A. Learning OpenCV[M]. Sebastopol: O’apos; Reilly Media, Inc., 2008.
[13] 李剛, 邱尚斌, 林凌, 等. 基于背景差法和幀間差法的運動目標檢測方法[J]. 儀器儀表學報, 2006, 27(8): 961-964.
[14] 包玉剛. 視頻圖像中的運動目標跟蹤算法研究[D]. 哈爾濱: 哈爾濱工程大學, 2010.
[15] GONZALEZ R C, WOODS R E, EDDINS W L. 數字圖像處理[M]. 北京: 電子工業出版社, 2009.
[16] 裴巧娜. 基于光流法的運動目標檢測與跟蹤技術[D]. 北京: 北方工業大學, 2009.
[17] 歐陽玉梅. 基于稠密光流算法的運動目標檢測的Python實現[J]. 現代電子技術, 2021, 44(1): 78-82.
Study of an accumulated interframe difference and mask based SF6leakage infrared video location method
HUANG Bo YANG Fan DENG Jianping BI Fan
(Electric Power Test and Research Institute, Guangzhou Power Supply Bureau Co., Ltd, Guangzhou 510410)
Automation and intelligence are the development trend of substation. More and more automatic inspection robots are used in inspection work. Infrared image leakage detection technique is widely used in detecting SF6gas leakage in electrical equipment. It can be used in local leakage searching and large-scale patrolling. Therefore, it is necessary to study the automatic location algorithm of infrared leakage detection. First, gray processing is applied to infrared image and Gauss blur is used to eliminate the noise. Threshold transformation is used to recognize the device area in the first frame image and obtain mask. Then, accumulated interframe difference method is used to get the cumulative changes in infrared images. Finally, the interferences outside the device area are removed, and the leakage points are located. The experiment shows that the proposed method has fast computing speed and good anti-interference ability, which makes it suitable for real-time video processing. This method can be used in both automatic substation patrol robot and handheld infrared image leakage detector.
infrared image; SF6; accumulated interframe difference; mask; leakage location
2022-01-05
2022-05-09
黃 柏(1988—),工程師,從事高壓試驗和器材檢驗工作。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
