潛器水下重力匹配導航研究進展
2022-07-23 12:15:20鄭偉付騰達李釗偉祝會忠徐愛功
科學技術與工程 2022年18期
鄭偉, 付騰達*, 李釗偉, 祝會忠, 徐愛功
(1.遼寧工程技術大學測繪與地理科學學院, 阜新 123000; 2.中國空間技術研究院錢學森空間技術實驗室, 北京 100094)
隨著社會的發展和科技的進步,海洋資源開發成為熱門領域,海洋安全也愈加重要。潛器機動性強和獨立性好,是維護中國海洋安全和根本利益的中流砥柱。海水為潛器提供了天然屏障,但是當潛器沉入海水中時,也失去了水面導航狀態連續獲取衛星、無線電、天文等定位信息的能力[1-2]。因此,解決潛器的水下導航問題是潛器自誕生以來的核心問題之一,特別是在核動力技術、不依賴空氣推進技術(air-independent propulsion,AIP)解決了潛器水下續航力后,導航成為制約潛器戰斗力形成的關鍵。隨著潛艇導航技術的發展,高精度慣性導航系統(inertial navigation system,INS)成為解決水下導航問題的主要技術手段[3]。慣性導航系統有利于自身的隱蔽,能夠實時定位自身的坐標及航向角。然而,單純的慣性導航系統定位誤差會隨時間累積增大,這就需要引入其他水下可用導航信息,修正慣性導航系統誤差,構成組合導航系統并提高潛器水下導航定位精度[4-5]。迄今為止,由地球物理場和慣性導航系統聯合的輔助導航技術一直都是有效遏制INS誤差累積問題的國際研究領域熱點之一。目前輔助導航技術包括地磁匹配導航、地形匹配導航和重力匹配導航[6-9]。地磁場本身存在長期和短期的變化,使地磁圖精度達不到較高要求,并且測磁技術也存在磁干擾等局限性。地形匹配最早用于飛行器導航,根據陸地上的地形為飛行器指示方向。水下地形匹配的發展晚于陸上地形匹配。水下地形匹配需要發射聲波用于提取水下地形特征,而聲納探測精度隨著聲納與海底距離的增大和海底環境的復雜度提高而下降,因此水下地形匹配導航不適用于深海地區[10-11]。水下重力匹配導航通過測量重力信息與地球重力場進行匹配實現導航定位[12]。定位時不需要其他條件、不向外釋放能量,應用前景良好。目前中國海軍潛器的組合導航精度較美國相差較大,這嚴重制約了水下潛器的戰斗力和戰略威懾力[13-14]。
地球密度不均勻造成地球各點的重力場信息不同,因此重力場可以映射為經緯度坐標。在重力輔助導航系統運行時,采集重力特征顯著區域的重力信息與重力基準圖對比得到位置信息,實現天空海一體化水下潛器慣性/重力組合導航系統重調[15]。
1 海洋重力場中外研究進展
衛星測高技術起源于海洋大地水準面測繪,為了解決大面積海洋測繪所面臨的耗時長、覆蓋率低、精度差等問題,美國宇航局(National Aeronautics and Space Administration,NASA)開始用衛星測量海洋大地水準面。1973年,NASA發射了搭載高度計的試驗衛星Skylab[16],進行衛星測高可行性試驗。1975年,NASA發射了第一顆專用測高衛星GEOS-3[17-18],實驗結果證明了衛星測高是可行的,并且滿足大面積海洋測繪精度要求。其他國家也相繼發射了測高衛星,各國在軌測高衛星數已接近20顆,其中歐美發達國家占比達到了八成以上[19]。
相比于傳統技術手段而言,利用衛星測高[20-21]獲得的海面高來求大地水準面值,進而反演海洋重力場更加方便快捷。該方法可以獲取全球60%以上的高分辨率海洋重力場和相應海域基本信息,有效解決了海洋測繪人力和物力不足的問題。所以,衛星測高法是目前獲取大區域海洋重力場最常用和最有效的手段之一,也是未來構建全球海洋重力場模型最重要的方法之一[22-24]。目前最具代表性的基于衛星測高數據反演海洋重力場研究團隊包括:①丹麥科技大學Anderson團隊和其發布的KMS-DNSC-DTU系列;②美國斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)Sandwell團隊和其發布的SS系列。
1.1 KMS-DNSC-DTU系列重力場模型
1996年,Andersen等[25]發布了KMS96全球海洋重力場模型,模型分辨率為3.75′×3.75′,精度為10 mGal,模型范圍82°S~82°N。1998年,Andersen等[25]發布了KMS98,分辨率為2′×2′,精度優于10 mGal。1999年,Andersen等[26]發布了KMS99,該模型高緯度地區分辨率得到了極大提高。2002年,Andersen等[27]發布了KMS02全球海洋重力場模型,該模型增加了湖泊重力場,使重力場模型更加完善。2007年,Andersen等[28]發布了DNSC07全球海洋重力場模型,該模型包含了極區以外所有海域的重力場信息,分辨率為1′×1′,模型范圍90°S~90°N。2010年,Andersen[29]發布了DTU10全球海洋重力場模型;2013年,Andersen等[30]發布了DTU13;2014—2018年,Andersen等[31-34]陸續發布了DTU14、DTU15、DTU17和DTU18全球海洋重力場模型。其中,KMS系列參考重力場為EGM96,DNSC07參考重力場為PGM07B,DTU系列參考重力場為EGM08+MDOT,DTU18是目前精度最高的全球海洋重力場模型。
1.2 SS系列重力場模型
1997年,美國SIO的Sandwell等[16]發布了V7.2全球海洋重力場模型,參考重力場為JGM-3、分辨率2′×2′、精度小于10 mGal、模型范圍為72°S~72°N。1998年,Sandwell等[35]發布了V8.1全球海洋重力場模型,V8.1引入了精度更優的參考重力場EGM96,得到的新模型空間分辨率為1′×1′。1999—2007年,Sandwell團隊不斷地更新數據和優化算法,陸續發布了一系列的模型。其中,V9.1、V10.1、V11.1和V15.1覆蓋范圍為72°S~72°N;V16.1和V17.1覆蓋范圍為80.7°S~80.7°N[36-37]。2009年,隨著EGM2008的發布,Sandwell團隊以新的大地水準面模型作為參考重力場更新了重力場模型V18.1。V18.1空間分辨率為1′×1′,精度為4 mGal。2010年,歐洲航天局發射了專門用于極地觀測的測高衛星Cryosat-2,該衛星能為極地重力場反演提供更為準確的數據。Sandwell等[35]將Cryosat-2衛星的數據加入原有的模型中陸續發布了V19.1、V20.1、V21.1、V22.1、V23.1等海洋重力場模型,最新版本的模型V23.1的精度為3 mGal,覆蓋范圍為85°S~85°N。
1.3 中國重力場模型發展
中國衛星測高技術起步較晚,但是發展迅速,正逐漸接近歐美國家水平。2011年,海洋2號(HY-2)衛星的成功發射填補了中國遙感測高領域的空白,使中國海洋動力監測跨入國際先進行列,也標志著中國正式進入自研測高衛星時代。HY-2衛星的主要任務是監測海洋動力環境,通過獲取海洋表面溫度場、大洋環流、有效海浪波高、海洋表面高度場、海洋重力場、海洋風場等能夠描述海洋的各種參數為中國在海洋資源開發、環境保護、科學研究、預測海洋狀況等領域提供相應服務。
中國具有廣袤的海洋國土,海岸線綿長,因此確定中國海洋重力場信息具有重要的社會意義和經濟價值。中國在衛星測高技術研究和海洋重力場反演方面取得了階段性成果,許厚澤等[38]利用T/P、ERS-1測高數據和Stokes逆運算法反演了中國近海重力異常,分辨率30′×30′,精度為30 mGal;李建成等[39]利用T/P、ERS-2/GM和Geosat大地測量數據計算得到了分辨率為2.5′×2.5′的海洋重力異常,衛星測高反演得到南海地區的重力異常精度為±9.3 mGal。隨著國際上更多衛星測高數據發布,海量測高衛星數據也為中國科研人員得到更高精度和分辨率的中國近海重力異常帶來巨大幫助,黃謨濤等[20]簡化了交叉點平差整體解法,提高了算法的適用性和穩定性;李建成等[39]和Bao等[40]反演了中國南海的區域重力場,分辨率和精度接近世界先進水平。在船載重力測量方面,陸飆等[41]提出了利用測線交叉點處重力測量觀測值建立漂移函數的方法,該方法可以有效地減少重力儀漂移異常的影響,為構建海洋重力場提供技術支持。在重力衛星反演重力場方面,陳鑑華等[42]對GOCE衛星重力梯度值的時變重力場進行了優化改正,自主實現了由GOCE衛星Level 1b重力梯度數據直接進行重力場反演。
2 重力儀中外研究進展
重力儀按測量結果的不同分為絕對重力儀和相對重力儀[43]。絕對重力儀直接測量重力值,用于重力基準點的建立。相對重力儀測量兩點之間的重力值之差。
2.1 國外重力儀發展現狀
經典絕對重力儀測量重力方法包括彈道法(測量直線加速度)、冷原子干涉法、單擺法等[44]。其中,下落法、上拋法、上拋下落法和冷原子干涉法測量原理相同,采用這種方法的便攜式絕對重力儀數量在200臺左右[45]。
2.1.1 自由落體式絕對重力儀
自由落體式絕對重力儀基本理論依據為牛頓第二定律,測量物體運動的時間t和距離s計算重力加速度。“上拋法”測重力時物體的運動分為下落運動和上拋運動,上拋下落的往復運動可以較好抵消單次下落運動中的誤差。“上拋”式重力儀結構精密、制作復雜,只有波蘭和意大利能夠制造。與“上拋法”相比,自由落體法更容易實現,在世界范圍內得到了廣泛應用。1983年,很多國家都研制出了重力儀[46-50],包括美國IGPP研制的激光干涉絕對重力儀、法國的GA60型絕對重力儀、德國MPG絕對重力儀、俄羅斯的GABL型重力儀。
隨著硬件和軟件技術的提升,重力儀測量精度越來越高。2004年,國際計量局正式將自由落體式重力儀作為測量重力的標準儀器。1992年,美國JILA實驗室研制出JILA-g型[44]絕對重力儀,精度接近1 μGal。1995年,JILA實驗室在JILA-g型的基礎上做了商品化改進,發布了FG5型絕對重力儀。FG5增加了主動隔振平臺和恒溫功能,優化了自由落體軌跡控制機構,大大增加了測量精度和穩定[51]。FG5-X和FG10-X是FG5型絕對重力儀的升級型號。FG5-X未解決反射鏡下落時驅動電機因保持通電出現的微小振動而影響位移測量系統的問題。FG10-X與FG5-X型重力儀的功能基本相同,激光器類型有所不同。A10是FG5的姊妹型[44],在理想環境下測量精度最高達1 μGal。2005年設計的FGL型綜合了FG5和A10的優點,在保持高性能的同時體積還較小。
在經典重力儀中,凸輪式絕對重力因其卓越的機械設計而受到世界各國的關注。凸輪型絕對重力儀中凸輪輪廓線的設計非常巧妙。直流電機驅動凸輪以均勻的速度旋轉,凸輪驅動帶動從動拖車做往復運動。當從動拖車行至最高點時,落體和從動拖車一起開始下落,從動拖車下落速度大于落體自由落體速度。然后從動拖車減速接住落體重新回到最高點,完成一次循環。美國JILA聯合實驗室研制的凸輪式絕對重力儀(圖1)的原理也是設計了此類凸輪機構,采用激光干涉法和銣原子鐘聯合測量落體下落距離和時間間隔。落體每個周期下落約45 mm,測量其下落長度和時間,通過擬合大量測量數據得到重力值。為了使整個測量過程順利進行,裝置中設計了兩個凸輪對稱存在以抵消單個凸輪造成的重心偏移。同時,該凸輪式重力儀還設計了一套結構簡單的彈簧-質量塊隔振系統用以減少地面震動對儀器的影響,經過測試得到測量精度為2.0 μGal[52]。
2.1.2 原子干涉絕對重力儀
根據玻色-愛因斯坦凝聚理論,當原子溫度足夠低時,所有原子會凝聚成一團低能量的原子團。用來做干涉實驗效果良好,可以用來測量加速度。原子干涉重力儀是根據原子的受激拉曼躍遷理論,原子源產生的原子束在雙光子拉曼脈沖的作用下先后分束偏轉,在t0+2時刻重新匯聚(圖2),此時兩束波的相位不同,產生了波的干涉[54-55]。通過探測裝置測量兩束原子的相位差,進而獲得與之相關的物理量。原子干涉重力儀的測量速度快,穩定性好,獲取相同精度所需的時間少于自由落體式重力儀[56],同時原子干涉重力儀精度提升空間較大,是未來重力儀發展的熱點。
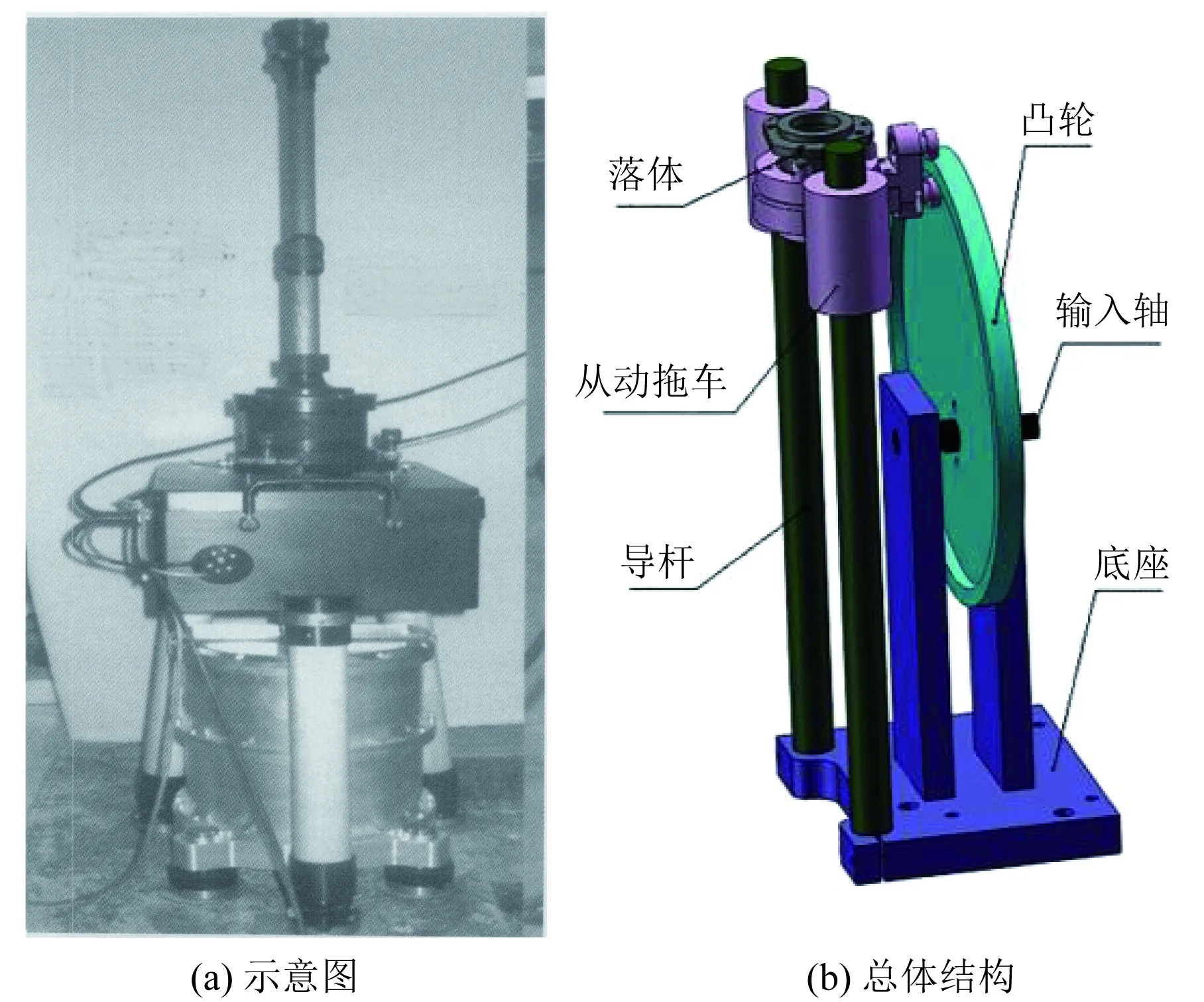
彈簧高度為24 in(1in=2.54 cm),運輸模式下為14 in;帶支腿的干涉儀高度為22.5 in;下降室高度為13.5 in圖1 凸輪式絕對重力儀[52-53]Fig.1 Cam absolute gravimete[52-53]

圖2 三拉曼脈沖原子干涉示意圖[57]Fig.2 Schematic diagram of three Raman pulse atomic interference[57]
1992年,美國斯坦福大學的朱棣文課題組研制出第一臺冷原子干涉絕對重力儀。2000年,該小組優化了干涉結構[58],有效降低了共模噪聲,并提出了用于補償多普勒頻移的算法,將靈敏度提高到3.4×10-8(°)/s·Hz-1/2。2011年,他們研制出一種銫冷原子重力儀[59],靈敏度為1×10-8g/Hz1/2(g為重力加速度),精度為3×10-9g。2013年,德國洪堡大學Peters小組研制的可移動式原子干涉重力儀[60](gravimetric atom interferometer,GAIN)(圖3)測量靈敏度接近10 μGal/Hz1/2。
2009年,法國巴黎天文臺LNE-SYRTE實驗室研制的原子重力儀CAG-01[62](圖4)正式開始運行,測量100 s的靈敏度為1 μGal。法國巴黎天文臺LNE-SYRTE實驗室和法國波爾多光子/數字/納米科技實驗室(LP2N)合作開發的高精度便攜式重力儀MiniAtom[63],預計測量靈敏度為10 μGal/Hz1/2。此外,英國、德國、新西蘭和美國的多家科研單位也相繼開展了冷原子絕對重力儀的研究工作。2018年,法國航天實驗室(ONERA)研制的絕對重力儀[64-65](圖5)完成了海上試驗,重力場模型偏差為1.4 mGal,均方誤差為2.4 mGal,精度遠超KSS32M海洋重力儀。
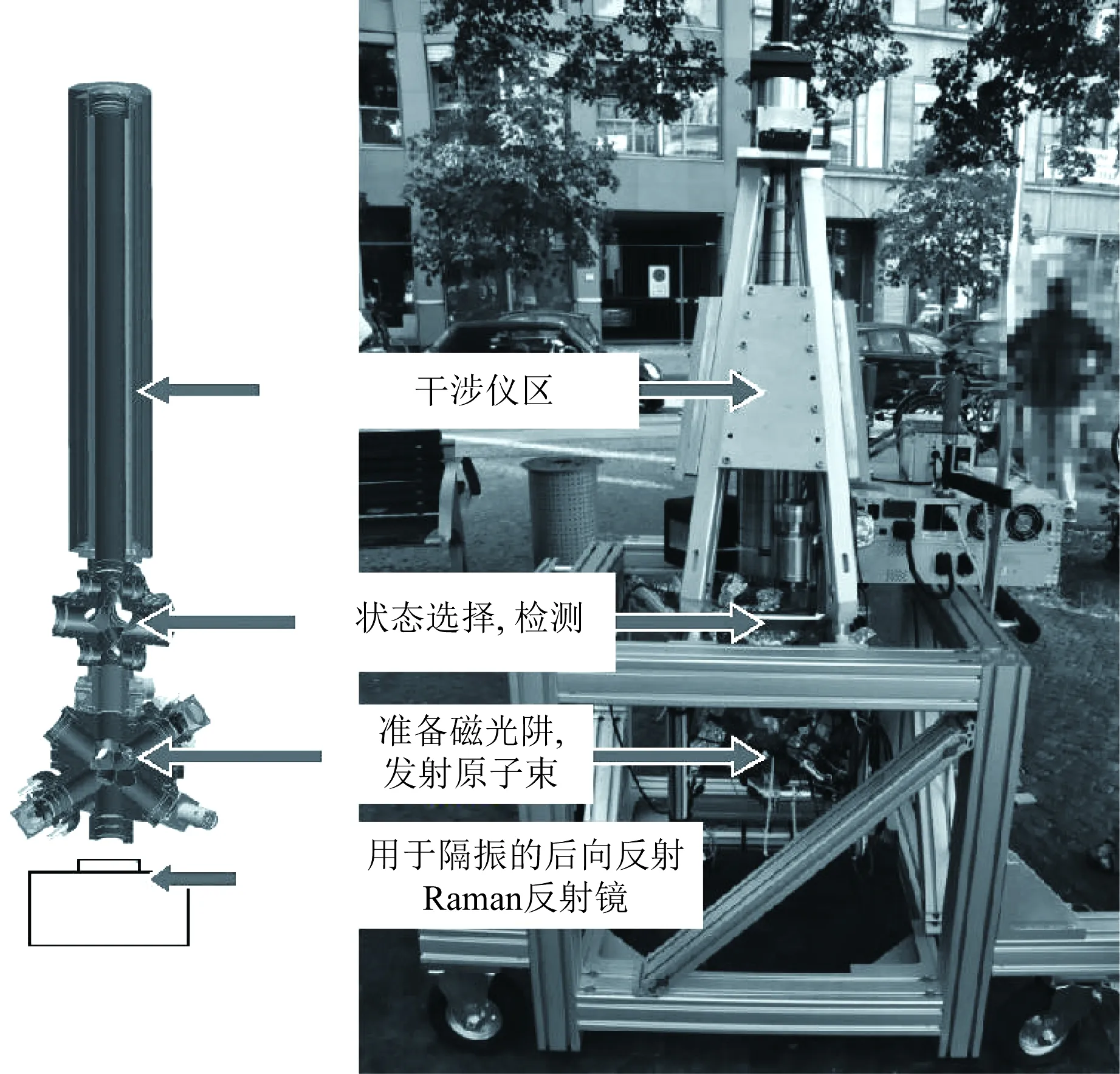
圖3 可移動式原子重力儀GAIN[60]Fig.3 Mobile atomic gravimeter GAIN[60]
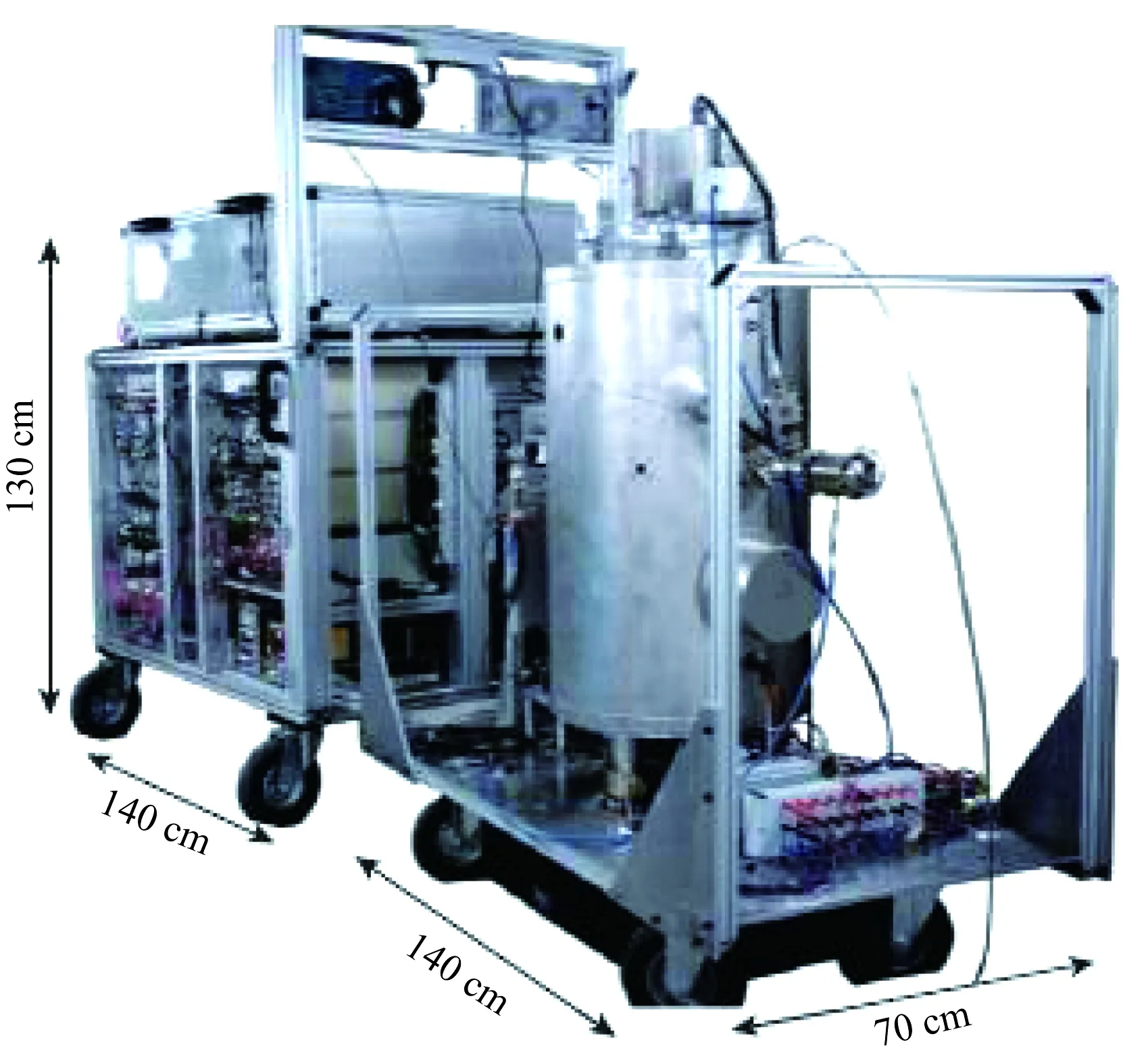
圖4 LNE-SYRTE實驗室研制的原子重力儀CAG-01[61-62]Fig.4 Atomic gravimeter CAG-01 developed by LNE-SYRTE laboratory[61-62]
2.1.3 相對重力儀
相對重力儀通常用于在運動的載體上(如航空器、艦艇)測量重力的動態變化量,即重力差值。其基本測量原理是根據零長彈簧對重力變化敏感的特性,監測測量零長彈簧處于不同空間位置的形變量[66]。不同的重力對應不同的形變量,兩點之間重力差可以通過形變量的變化量體現。目前應用廣泛的相對重力儀包括金屬彈簧重力儀和石英彈簧重力儀[67]。為了提高重力儀的測量精度和效率,相對重力儀還配備了穩定平臺以減弱載體運動產生的噪聲影響。

圖5 ONERA研制的原子重力儀[61]Fig.5 Atom gravimeter installed in a ship for marine measurement developed by ONERA[61]
(1)雙軸陀螺穩定平臺重力儀。美國拉科斯特和隆伯格(Lacoste&Romberg)公司發布了首臺搭載在雙陀螺穩定平臺上的海洋重力儀[69](圖6)。使用金屬材料的零長彈簧作為重力敏感器,固定在兩軸陀螺穩定平臺上過濾載體產生的轉向噪音。此后,貝爾航空研制了BGM海空重力儀、俄羅斯中央科學研究所研制了Chekan-Am重力儀、德國Bodenseewerk公司研制了KSS系列海空重力儀,這些重力儀結構類似但零長彈簧的材料不同,精度均約為1 mGal[70]。
(2)三軸慣性穩定平臺重力儀。由于雙軸陀螺穩定平臺無法消除載體水平加速度噪聲,所以需要在穩定平臺上再加一個方向變為三軸,即三軸慣性穩定平臺。加拿大Sander地球物理公司(Sander Geophysics Limited,SGL)的AIRGrav重力儀(圖7)是三軸穩定平臺重力儀的主要代表,該儀器基于三軸慣性穩定平臺+石英撓性加速度計傳感器方案[71],并且做了溫度控制。經過多次試飛試驗,該型重力儀測量精度為0.5 mGal,分辨率小于2 km,動態測量范圍為±2 000 Gal[72]。

圖6 L&R海洋重力儀[68]Fig.6 L&R marine gravimeter[68]
莫斯科重力測量技術公司首次試飛了GT-1A型航空重力儀,并且試驗成功,它的基本原理與AIRGrav類似,并同樣采用了溫度控制措施。在GT-1A的基礎上又衍生出海洋型GT-2M(圖8)、航空型GT-2A(圖9)和極地型GT-2R。GT-1A航空重力儀的穩定平臺升級了隔振系統,增大了重力敏感器的量程,該系列重力儀[73]測量精度為0.6 mGal,分辨率約為2 km,動態范圍為10 Gal。

圖7 AIRGrav 重力儀[68]Fig.7 AIRGrav gravimeter[68]

圖8 GT-2M 重力儀[68]Fig.8 GT-2M gravimeter[68]

圖9 GT-2A 重力儀[68]Fig.9 GT-2A gravimeter[68]
(3)捷聯數學穩定平臺重力儀。捷聯式重力儀采用數學平臺代替機械平臺,通過后續數據處理,降低動態環境下產生的噪音。與穩定平臺式重力儀相比,體積更小,質量更輕,耗能更低,成本更少,還具備可靠性高和操作性好等優點。在20世紀最后10年,隨著新技術的發展,世界各國都開始研制捷聯式重力儀。加拿大卡爾加里大學開發出了捷聯數學穩定平臺重力測量系統[74],該系統使用了LASEREFⅢ型捷聯慣導系統,在試驗中其測量精度可達1.5 mGal/2 km或2.5 mGal/1.4 km。
2.2 中國重力儀發展現狀
中國重力儀的發展自20世紀60年代開始,許多單位自主研制了重力儀。中國計量科學院研制的NIM-Ⅱ型絕對重力儀[75],測量不確定度為4 μGal,達世界較高水平,但距世界先進水平還有差距。在冷原子干涉重力儀方面中國起步較晚,對微小型化研究才剛開始[76]。目前,實驗室測試結果誤差約為50 μGal[77-78],與國際上同類重力儀相近,但仍不能滿足高精度的應用需求。
1977年,國家地震局海洋地震物理研究所研制出ZYZY型海洋重力儀[79],通過實驗可知最高精度為1.69 mGal。1984年,中國科學院和國家地震局合作研制的DZY-2型海洋重力儀[80],經過了大量的航海測量實驗,精度為2.4 mGal。1986年,中科院測地所研制成功了海洋重力儀CHZ[80-81],經過實驗調試,測量精度接近1 mGal。1995年,西安測繪研究所承擔了中國首個航空重力測量系統(Chinese Airborne Gravity System,CHAGS)的研發,之后開發了基于L&R型航空重力儀的重力數據處理算法和系統。2000年以后,慣性重力儀技術研究開始進入重力測量和慣性儀器的開發應用領域。早在“十五”期間,為滿足中國海軍需要,中船重工集團股份有限公司就在中國海軍基礎上組建了一支強大的研究隊伍。天津導航儀器研究所開始了海洋慣性重力儀的制造,研制了基于金屬零長彈簧原理的雙軸慣性穩定平臺重力儀和具有高精度石英撓性加速度計原理的三軸慣性穩定平臺重力儀[80],測量精度為1 mGal。
2008年,國防科技大學科研團隊基于激光陀螺儀和石英撓性加速度計的原理,研制出第一代捷聯式重力儀SGA-WZ01。經飛行試驗,SGA-WZ01[82]測量精度約為1.5 mGal/160 s。“十二五”期間,國防科技大學科研團隊開發了第二代捷聯式重力儀SGA-WZ02[83](圖10),精度為1 mGal/160 s。
北京航天控制儀器研究所的SAG系列海空重力儀(圖11)采用了激光陀螺捷聯數學穩定平臺、石英撓性航空重力加速度計,在對比實驗中測量精度與相同條件下的GT-1A型和L&R型基本相當[84]。
中國最早從事慣性技術研究的是北京自動化控制設備研究所,與加拿大SGL的AIRGrav重力儀類似,其開發的重力儀樣機GIPS-1AM[85](圖12)采用石英撓性加速度計傳感器和三軸慣性穩定平臺方案在已有裝備基礎上升級而成,內符合精度優于1 mGal。該平臺式重力儀的優點是測量精度穩定,造型小巧。
總體而言,在經過早期的探索和學習后中國重力儀發展突飛猛進。但是由于后續研究及技術理論缺乏和材料研制與加工工藝等基礎設施不完備,21世紀前幾年中國的高精度絕對重力儀發展陷入瓶頸期。近幾年,隨著理論和技術上的突破,加之重力儀應用越來越廣泛,重要性增加。這都推動了中國絕對重力儀的迅速發展。

圖10 SGA-WZ02型航空/海洋重力儀[80]Fig.10 SGA-WZ02 airborne/marine gravimeter[80]

圖11 SAG-2型航空/海洋重力儀[80]Fig.11 SAG-2 airborne/marine gravimeter[80]

圖12 GIPS-1型航空/海洋重力儀[85]Fig.12 GIPS-1 airborne / marine gravimeter[85]
3 重力梯度儀中外研究進展
重力梯度測量是一項困難而耗時的地球物理勘探與大地測量任務,重力梯度數據對于經濟、國防、科學發展等都具有重要意義。1971年,美國空軍提出研發高精度重力梯度儀的計劃,隨后重力梯度儀被越來越多的科學家關注并重視,重力梯度儀得到了更好發展。直至今天,重力梯度儀雖然發展迅速,但是能夠實際應用的產品并不多,大部分重力梯度儀仍處于試驗樣機階段,世界上唯一投入實際生產工作的重力梯度儀是美國貝爾宇航公司(Bell Aerospace,現并入洛克希德·馬丁公司)的旋轉加速度計式重力梯度儀。
重力梯度儀發展至今,已經衍生出了不同系列不同原理的重力梯度測量設備。發展最迅速的是旋轉加速度計式的重力梯度儀,發展前景良好的是超導重力梯度儀,最先進的有望提高精度上限的是基于激光干涉和原子干涉的絕對重力梯度儀[86-88]。
3.1 國外重力梯度儀發展現狀
1975年,美國貝爾宇航公司開始研制基于旋轉加速度計的重力梯度儀(gravity gradient instrument,GGI)。1990年,該儀器被用于潛艇輔助導航,后來被安裝在石油和天然氣勘探船上。GGI最初只能用來測量部分重力矢量分量對某一個方向的偏導數,故也被稱為部分張量重力梯度儀。2000年,洛克希德·馬丁(Lockheed Martin space systems company,LMT)公司和澳大利亞必和必拓(BHP)公司合作研發了獵鷹(FALCON)重力梯度儀。1988—2002年,貝爾宇航公司與美國軍方合作研制Air-FTGTM型全張量航空重力梯度儀,Air-FTGTM型使用了全張量重力梯度測量技術(full tensor gravity,FTG)。FTG測量系統將三套GGI組合在一個穩定平臺上,能夠同時測量重力梯度的全部獨立分量。英國ARKeX公司對FTG測量系統做了特殊改進形成了FTGeX測量系統,可以較好地適應一些特殊要求。旋轉加速度計式重力梯度儀是目前唯一可以直接投入實際生產應用的重力梯度儀[89]。
基于微機電系統(micro-electro-mechanical system,MEMS)的重力梯度儀(圖13)將兩個差分加速度計直接集成在一枚晶片上,具有更小的晶片體積和質量,這也是未來利用衛星測量重力梯度的重要發展方向。
靜電懸浮加速度計重力梯度儀用差分電容靜電懸浮加速度計(圖14)作為重力梯度敏感器[90],測量精度可達很高。該類型重力梯度儀的量程小和靈敏度高,可以較好地應用在太空微重力環境中。目前美國、法國等已成功研制出高精度的靜電懸浮加速度計系統。
超導重力梯度儀是利用某些物質的低溫超導特性制成。這類重力梯度儀具有靈敏度高、穩定性好等優點。20世紀80年代早期,馬里蘭大學研制出單軸超導重力梯度儀實驗室樣機,精度為0.01 E[91]。目前,超導重力梯度儀的研制取得突破性進展,處于準實用階段。3個軸向分量超導重力梯度儀和3個交叉分量超導重力梯度儀可以組合成全張量超導重力梯度儀(SGG)。
基于扭矩的重力梯度儀是利用扭秤來測量重力梯度,用扭絲懸掛橫梁,橫梁端點懸掛質量塊,即可形成水平扭秤。一戰時扭秤被廣泛用于鹽丘圖測繪。隨后,一些石油公司利用扭秤系統測量了全球重力梯度。1922年,美國Shell公司和Amerada Hess公司引進了扭秤。兩年以后,Amerada公司首次利用扭秤發現了Nash鹽丘,之后又使用該設備發現了其他一些鹽丘和油田[92]。扭秤式重力梯度儀的使用在石油勘探歷史上具有不可或缺的意義。不過,扭秤式重力梯度儀的結構穩定性差,測量時間長,受地形起伏影響很大,不適用于野外觀測,因此后來逐漸被其他類型的重力梯度儀取代。
m=0.02 kg為檢驗質量; b=5 cm為兩個檢驗質量質心間的距離圖13 基于MEMS的重力梯度儀的測量機構[90]Fig.13 Measuring mechanism of MEMS based gravity gradiometer[90]
Cx1與Cx2為固定電極與移動電極間的電容;d0為固定電極與移動電極之間的初始間距;x為變化量 圖14 差分電容靜電懸浮加速度計[90]Fig.14 Differential capacitance electrostatic suspension accelerometer[90]
目前,絕對重力梯度儀主要包括激光干涉型和原子干涉型兩種。
激光干涉絕對重力梯度儀可以測量固定高度差的重力差值,儀器內有兩條光路分別測量重力值,然后利用差分算法得出重力差。美國Micro-g公司為NASA設計了一款激光干涉絕對重力梯度儀用于科學研究。激光干涉絕對重力梯度儀具有更大的動態范圍,對近地孔洞敏感,有利于動態測量。目前,該絕對重力梯度儀還未正式公布其測量精度和分辨率的水平。
原子干涉絕對重力梯度儀的理論基礎是原子噴泉理論,設計思路主要包括單重力儀多次拋射原子團、單重力儀多次原子拉曼光脈沖和雙重力儀組合三種。原子干涉對重力場的變化十分敏感,理論上不會發生漂移,因此使用原子干涉絕對重力梯度儀測量的數據精度和分辨率更高。美國Stanford大學朱棣文小組研制的原子干涉絕對重力梯度儀試驗機分辨率可達4×10-9g/Hz1/2,是已知最高精度和分辨率的原子干涉絕對重力梯度儀[90]。意大利佛羅倫薩大學也進行了原子干涉重力梯度測量系統的研究,他們設計了一種單磁光阱MOT雙拋系統,經過實驗參數優化,該系統可以實現重力加速度的短期穩定度為3×10-9g/Hz1/2,優化后分辨率為5×10-11g[93]。不過,隨著原子干涉技術的進步與時間標準的提高,該型重力梯度儀的精度和分辨率水平會進一步得到提高。
3.2 中國重力梯度儀發展現狀
中國重力梯度儀研制從“十一五”開始,經過10年發展,中國重力梯度儀核心器件加速度敏感器的靈敏度達到了1×10-8g,分辨率為70 E[94]。2010年,中國科學院武漢物數所研制的原子干涉重力儀樣機的分辨率已達到6×10-9g[95],其中垂向原子重力梯度儀精度為7.5 E,水平原子重力梯度儀精度為7.4 E[80]。華中科技大學、浙江大學和浙江工業大學在垂向原子重力梯度儀的技術上取得了重要突破。華中科技大學的原子干涉儀用于重力測量時靈敏度可達5.5×10-9g/Hz1/2,重力梯度儀的靈敏度為670 E/Hz1/2。浙江大學研制的原子重力儀精度為10-8m/s2[96]。中國重力梯度測量所采用的理論與技術包含了國際上的主流方案,但距國際先進水平仍有一定距離。
目前中國重力測量主要依靠進口方式,航空重力梯度測量在某些方面尚屬于空白領域。
4 錢學森空間技術實驗室天空海一體化導航與探測團隊研究進展
研究團隊預期利用天空海一體化融合手段(星載、機載和船載),提出全球、高精度和高空間分辨率的海洋重力場反演理論方法和關鍵技術,以及構建高精度智能水下重力匹配導航優化算法,進而為實現自主、隱蔽、長航時和高精度的全球水下導航提供理論方法和關鍵技術支撐。
4.1 已取得階段性研究成果
(1)開展了基于海面測高數據反演海洋重力場研究。提出了基于垂線偏差空間分辨率損失最小化的海面高反演重力異常法,研究結論:經內部檢核反演模型與國際模型V28和DTU17的標準差分別為2.3 mGal和1.26 mGal;經外部檢核反演模型與船測點標準差為4.84 mGal,國際模型V28和DTU17與船測點標準差分別為3.95 mGal和5.86 mGal。因此,海洋重力場反演模型與國際機構結果差異較小,且相對船測數據的誤差與國際機構相當。
(2)開展了有助于提高水下重力匹配導航精度的海洋重力加密基準圖重構方法研究。為了提高海洋重力基準圖空間分辨率并使精度損失最低,在傳統克里金二維插值法的半方差函數中首次引入平均海平面第三維分量,構建了新型平均海平面三維修正法。在相同海域及同等條件下,采用新型平均海平面三維修正法較傳統克里金二維插值法的重力基準圖精度提升了62.25%[97]。
(3)開展了海底地形反演研究,有助于規避淺灘、暗礁等危險區域。通過引入地形約束因子,改進變異函數模型進而優化權重,提出了用于長波重力場模型構建的新型地形約束因子權重優化算法。該方法充分考慮海底地形約束條件對Kriging算法的變異函數的影響,分別從水平與深度方向構建變異函數模型,解決了長波重力場模型構建過程中過擬合與擬合不足的問題,進而提高海底地形反演的精度。結果表明,基于新方法反演的海底地形相較傳統算法,測船檢核點差值結果提升近26%,且優于國際常用ETOPO1模型[98]。
(4)針對慣性/重力匹配導航系統中適配性問題展開了研究。使用Sobel算子對重力異常圖進行卷積運算獲取卷積特征圖,結合卷積特征圖和重力異常圖構建卷積坡度參數,并聯合卷積特征圖的卷積行列間差值/卷積方差與重力異常圖的池化差值/極差等特征參數,基于支持向量機算法,提出卷積坡度特征值-支持向量機聯合法。結果表明:與預標定結果相比,測試集的分類準確率在92%以上,優良適配區內定位精度均小于1個格網,此方法能夠有效區分適配區域和非適配區域[99]。
(5)開展了水下潛器重力匹配導航的可靠性研究。以誤匹配的后處理為切入點研究,以先驗遞推多次匹配和迭代最小二乘為思路,基于統計和擬合原理提出了新型先驗遞推迭代最小二乘誤匹配修正法,并綜合分析討論了遞推采樣點數、先驗匹配點數等參數,基于先驗遞推迭代最小二乘誤匹配修正法,構建了新型誤匹配判別動態修正模型。結果表明:在優良適配區內,經判別修正后誤匹配點數由2個降低到0個,基本可以剔除全部誤匹配點;在一般適配區內,經判別修正后誤匹配點數由18個降低到4個,大幅度降低誤匹配點的出現概率,提高了匹配導航可靠性[100]。
4.2 預期研究成果
(1)鑒于當前公布的全球海底地形空間分辨率(0.25′×0.25′)高于全球海洋重力異常空間分辨率(1′×1′),預期綜合考慮海洋重力異常與海底地形之間的相關性,以高精度和高空間分辨率海底地形為數據元,結合高精度船測重力數據,并聯合重力校正和重力地質法,提出新型海底地形-重力聯合法,旨在保證高精度的前提下,提高海洋重力異常模型的高空間分辨率。
(2)預期探討新型格網拓撲結構迭代最佳環域點算法的構建,以慣導起點位置為中心并以預設漂移誤差和旋轉角張成小環域匹配格點而構建環型拓撲結構的航跡起點小環域匹配定位機制,根據航跡起點的最佳匹配位置再結合慣導航向航距信息得到大環域匹配格網的中心位置,再基于慣導累積漂移誤差等以確定大環域匹配格網環數并按中間環半徑的格點基準偏轉角和“內倍外半”角原則而構建格網拓撲結構迭代最佳環域點法,旨在提高水下潛器重力匹配導航精度。
5 結論
中國海岸線綿長,海洋資源豐富,潛艇作為海洋戰略的重要組成部分為保衛領土安全與經濟利益做出了巨大貢獻。保障潛艇水下安全尤為重要,慣性/重力匹配導航技術可以有效提高水下導航精度。區域海洋重力場研究已取得階段性成果,隨著越來越多測高衛星數據公布,融合多元數據反演有利于提升重力場信息的空間分辨率和精度。同時,重力儀/重力梯度儀的研究也取得較大進步。隨著海洋重力場空間分辨率和精度的提高、海空重力儀精度的提高、重力匹配算法的優化,水下重力匹配導航精度將會達到實用水平。錢學森空間技術實驗室天空海一體化導航與探測團隊在海洋重力基準圖構建、海底地形反演、重力匹配導航算法等方面取得了階段性進展。同時,團隊正在開展基于重力和重力梯度的水下障礙物探測技術研究,用以輔助潛艇水下導航,并取得了初步研究成果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03