同步收放線裝置的設(shè)計(jì)與實(shí)現(xiàn)
2022-07-23 12:17:30王健金濤濤張軍王穩(wěn)
科學(xué)技術(shù)與工程 2022年18期
關(guān)鍵詞:系統(tǒng)
王健, 金濤濤*, 張軍, 王穩(wěn)
(1.北京建筑大學(xué)機(jī)電與車輛工程學(xué)院, 北京 100044; 2.北京市建筑安全監(jiān)測(cè)工程技術(shù)研究中心, 北京 100044)
無人駕駛測(cè)試系統(tǒng)通過測(cè)試車搭載被測(cè)設(shè)備在平直軌道上按照預(yù)定的速度運(yùn)行來模擬移動(dòng)目標(biāo)。為確保數(shù)據(jù)可以穩(wěn)定、可靠、快速傳輸,以及在特殊工況下傳輸數(shù)據(jù)的抗干擾能力和保密性要求,多采用有線通信方式。
光纖通信由于具有抗干擾能力強(qiáng)、數(shù)據(jù)傳輸穩(wěn)定、保密性強(qiáng)等優(yōu)點(diǎn),測(cè)試系統(tǒng)常選用光纜進(jìn)行數(shù)據(jù)以及信號(hào)的傳遞。但光纜屬于特殊材料,質(zhì)地脆、機(jī)械強(qiáng)度差,測(cè)試車運(yùn)行時(shí)會(huì)經(jīng)歷不規(guī)則變速運(yùn)動(dòng),若光纜與測(cè)試車無法同步運(yùn)行,當(dāng)車速度驟變時(shí)會(huì)直接導(dǎo)致其后方拖拽的光纜受到?jīng)_擊,可能會(huì)使光纜斷裂,造成通訊中斷。由于光纜在線槽中滑動(dòng),隨著光纜拖出長(zhǎng)度變化,其受力大小也會(huì)發(fā)生變化,若不采用有效的措施會(huì)導(dǎo)致受力疊加,造成光纜損傷。因此需要收放線裝置協(xié)助測(cè)試系統(tǒng),通過恒張力收放光纜的方式,在保護(hù)光纜不受到較大沖擊的同時(shí)延長(zhǎng)光纜使用壽命。
光纜使用過程中張力如何測(cè)量及控制是收放線系統(tǒng)應(yīng)用的關(guān)鍵。傳統(tǒng)的收放線裝置雖然能夠基本上滿足日常的生產(chǎn)需要[1],但人為因素對(duì)其張力控制影響較大,不能實(shí)現(xiàn)線纜的恒張力收放[2]。
除光纜收放外,相當(dāng)多的領(lǐng)域和行業(yè)同樣需要張力控制[3],如紡織業(yè)、造紙業(yè)以及印刷業(yè)等,因此對(duì)張力控制進(jìn)行深入研究具有重要意義。羅金龍[4]對(duì)絡(luò)筒機(jī)紗線張力控制策略進(jìn)行了研究,采用單閉環(huán)控制方式實(shí)現(xiàn)了紡紗張力的控制,系統(tǒng)結(jié)構(gòu)相對(duì)比較簡(jiǎn)單,但卷繞速度低,張力波動(dòng)幅度大。王東偉等[5]選用卡爾曼濾波算法建立了特殊情況下收卷恒張力控制系統(tǒng),提高了收卷張力的魯棒性,但不能進(jìn)行線材的恒張力收放。彭志輝等[6]將反饋控制、預(yù)測(cè)補(bǔ)償控制相結(jié)合,實(shí)現(xiàn)繞線機(jī)穩(wěn)定控制,但系統(tǒng)結(jié)構(gòu)復(fù)雜,很難滿足野外應(yīng)用的需求。現(xiàn)有的計(jì)算機(jī)張力控制系統(tǒng)雖然精度高,能很好地控制線纜收放張力,但只是針對(duì)造紙、紡紗等專門領(lǐng)域的特定應(yīng)用進(jìn)行的設(shè)計(jì),無法滿足光纜恒張力收放線的應(yīng)用需求,并且因結(jié)構(gòu)復(fù)雜、成本較高、維護(hù)困難,也限制了其廣泛應(yīng)用[7]。
針對(duì)上述裝置不能滿足線纜恒張力收放的弊端,同時(shí)為提高光纜收放的同步性和穩(wěn)定性,現(xiàn)提出一種同步收放線裝置的總體結(jié)構(gòu)以及恒張力控制系統(tǒng)的設(shè)計(jì)方法。在結(jié)合二級(jí)緩沖裝置的基礎(chǔ)上,引入前饋+PID閉環(huán)反饋控制策略來減少光纜同步收放過程中受到的較大沖擊,以滿足各種條件下收放線的需要。
1 同步收放線系統(tǒng)的總體設(shè)計(jì)
同步收放線裝置的結(jié)構(gòu)如圖1(a)所示,主要包括光纜承載滾筒、輔助排線單元、齒形帶傳動(dòng)系統(tǒng)、各級(jí)導(dǎo)向輥?zhàn)拥龋豢刂撇糠钟伤欧姍C(jī)控制系統(tǒng)、遠(yuǎn)距離通信系統(tǒng)、壓力反饋系統(tǒng)和張力控制系統(tǒng)等模塊組成。其中壓力監(jiān)測(cè)及布局如圖1(b)所示,收放線時(shí)光纜壓住導(dǎo)向輥?zhàn)樱瑢?dǎo)向輥?zhàn)觾啥藨冶哿荷系膲毫鞲衅鳈z測(cè)出當(dāng)前壓力大小,通過計(jì)算將導(dǎo)向輥?zhàn)铀軌毫Φ刃楣饫|所受張力大小。
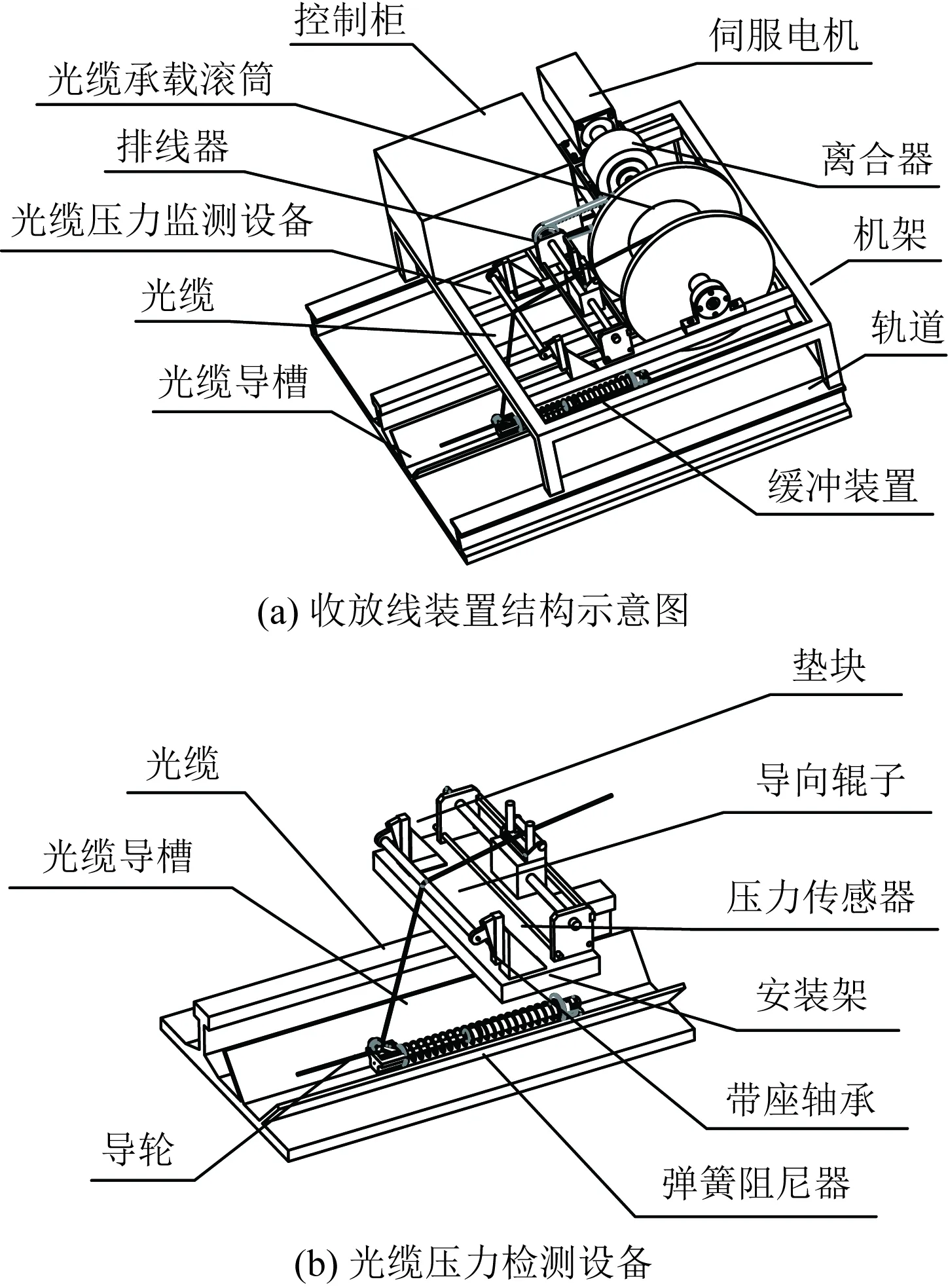
圖1 收放線裝置結(jié)構(gòu)圖Fig.1 Structure diagram of cable wiring device
2 恒張力控制系統(tǒng)設(shè)計(jì)
以光纜放線過程為例,系統(tǒng)受力如圖2所示。測(cè)試車輛向前運(yùn)動(dòng),拖動(dòng)光纜在不銹鋼導(dǎo)槽中滑動(dòng);壓力傳感器實(shí)時(shí)測(cè)量光纜收放過程中的張力變化情況;兩級(jí)緩沖裝置可將不規(guī)則運(yùn)動(dòng)下光纜所受沖擊進(jìn)行過濾;離合器調(diào)整阻力,時(shí)刻保證整個(gè)系統(tǒng)的動(dòng)態(tài)平衡,使光纜張力保持相對(duì)恒定。
現(xiàn)場(chǎng)實(shí)際測(cè)試表明,整個(gè)系統(tǒng)運(yùn)行過程中測(cè)試車對(duì)光纜的拉力隨著車輛運(yùn)行距離及加速度的變化而不斷變化。整個(gè)系統(tǒng)力學(xué)方程為
Ft+T+FK1+FC1+FK2+FC2+Ff=Fl
(1)
式(1)中:FK1、FK2、FC1、FC2分別為一、二級(jí)緩沖裝置提供的彈力及阻尼力。

Ft為離合器所提供的的阻力;T為光纜張力;Ff為拖動(dòng)光纜產(chǎn)生的摩擦力;Fl為測(cè)試車拖動(dòng)光纜時(shí)的拉力;x1、x2分別為兩級(jí)緩沖裝置位移大小;ω為收線卷筒轉(zhuǎn)動(dòng)角速度;V是測(cè)試車運(yùn)行速度;K1、C1分別為一級(jí)緩沖裝置彈簧彈性系數(shù)和阻尼器阻尼系數(shù);K2、C2分別為二級(jí)緩沖裝置彈簧彈性系數(shù)和阻尼器阻尼系數(shù)圖2 收放線裝置系統(tǒng)受力圖Fig.2 Force diagram of cable wiring system
2.1 兩級(jí)緩沖機(jī)構(gòu)的受力分析
一級(jí)緩沖安裝在收放線裝置底部,如圖1(a)所示。光纜通過多級(jí)導(dǎo)向輥?zhàn)訉?dǎo)入光纜導(dǎo)槽。一級(jí)緩沖裝置為單自由度有阻尼激振系,設(shè)置的目的是防止由于車速突變引起光纜張力的大幅變化,其機(jī)構(gòu)簡(jiǎn)圖如圖3(a)所示。二級(jí)緩沖裝置安裝在測(cè)試車尾部,其作用是保護(hù)光纜不會(huì)隨測(cè)試車輛運(yùn)動(dòng)而受到?jīng)_擊,系統(tǒng)簡(jiǎn)圖如圖3(b)所示。



(2)
對(duì)式(2)進(jìn)行整理可得

(3)
測(cè)試車位移長(zhǎng)度與收放線裝置排線長(zhǎng)度的差值為緩沖裝置總位移x2。因此設(shè)x2為輸入,x1為輸出,則該系統(tǒng)的模擬結(jié)構(gòu)圖如圖4所示。

圖3 緩沖裝置系統(tǒng)簡(jiǎn)圖Fig.3 Buffering system diagram

圖4 系統(tǒng)模擬結(jié)構(gòu)圖Fig.4 System simulation structure diagram
2.2 系統(tǒng)摩擦力計(jì)算模型
隨著光纜被不斷拖出,在線槽中的光纜質(zhì)量不斷增加,摩擦力也不斷增大。根據(jù)現(xiàn)場(chǎng)應(yīng)用的實(shí)際經(jīng)驗(yàn)可認(rèn)為摩擦力大小與測(cè)試車運(yùn)行速度呈線性關(guān)系,摩擦力計(jì)算公式為
(4)
式(4)中:v為拖動(dòng)光纜速度;t為光纜被拖動(dòng)時(shí)間;?為光纜質(zhì)量系數(shù);g為重力加速度;μ為光纜與固定導(dǎo)槽滑動(dòng)摩擦的摩擦系數(shù)。
2.3 平衡阻力的閉環(huán)控制策略
PID (proportional-integral-derivative control) 控制是最早發(fā)展起來的控制策略之一,由于其算法簡(jiǎn)單、魯棒性好、可靠性高,被廣泛應(yīng)用于工業(yè)過程控制,其數(shù)學(xué)表達(dá)式為

(5)
式(5)中:u(t)為PID控制器輸出;e(t)為系統(tǒng)誤差;Kp為比例系數(shù);Ki為積分系數(shù);Kd為微分系數(shù)。其控制原理為控制器經(jīng)加權(quán)計(jì)算得出控制信號(hào),驅(qū)動(dòng)被控對(duì)象達(dá)到精確控制的要求。
光纜收放過程中根據(jù)傳感器反饋的張力大小,通過前饋+反饋的控制方案調(diào)整離合器的阻尼力,減小張力變化幅度,達(dá)到恒張力收放光纜的目的。其控制系統(tǒng)原理框圖如圖5所示。

圖5 光纜恒張力收放控制系統(tǒng)框圖Fig.5 Block diagram of constant tension control system for optical cable
3 同步收放線系統(tǒng)仿
為驗(yàn)證所提出的控制方法能否縮短系統(tǒng)響應(yīng)時(shí)間、提高控制精度,達(dá)到恒張力收放光纜的目的。根據(jù)前文建立的數(shù)學(xué)模型,在MATLAB/Simulink環(huán)境下搭建同步收放線系統(tǒng)的仿真模型,所建模型如圖6所示。光纜初始被拖出長(zhǎng)度為2.5 m;為保護(hù)光纜不受沖擊,對(duì)光纜預(yù)先施加張力48 N;模型中所選取的參數(shù)均來源于現(xiàn)場(chǎng)實(shí)測(cè),具體參數(shù)如表1所示。
對(duì)于收放線系統(tǒng)而言,采用前饋+PID閉環(huán)反饋控制策略可以有效地實(shí)現(xiàn)光纜張力的快速穩(wěn)定。如圖7示,光纜張力在車輛運(yùn)行0.8 s后系統(tǒng)趨于穩(wěn)定。對(duì)比普通PID控制(圖8),本文所提出的控制策略下系統(tǒng)響應(yīng)時(shí)間更短,且光纜張力變化平穩(wěn),未產(chǎn)生較大突變;系統(tǒng)穩(wěn)定后張力值基本保持在50 N恒定狀態(tài)。因此前饋+PID閉環(huán)反饋控制策略可實(shí)現(xiàn)光纜恒張力同步收放的要求。

K為一級(jí)緩沖彈簧彈性系數(shù);C為本系統(tǒng)所使用的離合器阻力系數(shù)圖6 同步收放線系統(tǒng)的Simulink仿真模型Fig.6 Simulink model of synchronous cable wiring system

表1 同步收放線系統(tǒng)參數(shù)Table 1 Parameters of synchronous cable wiring system
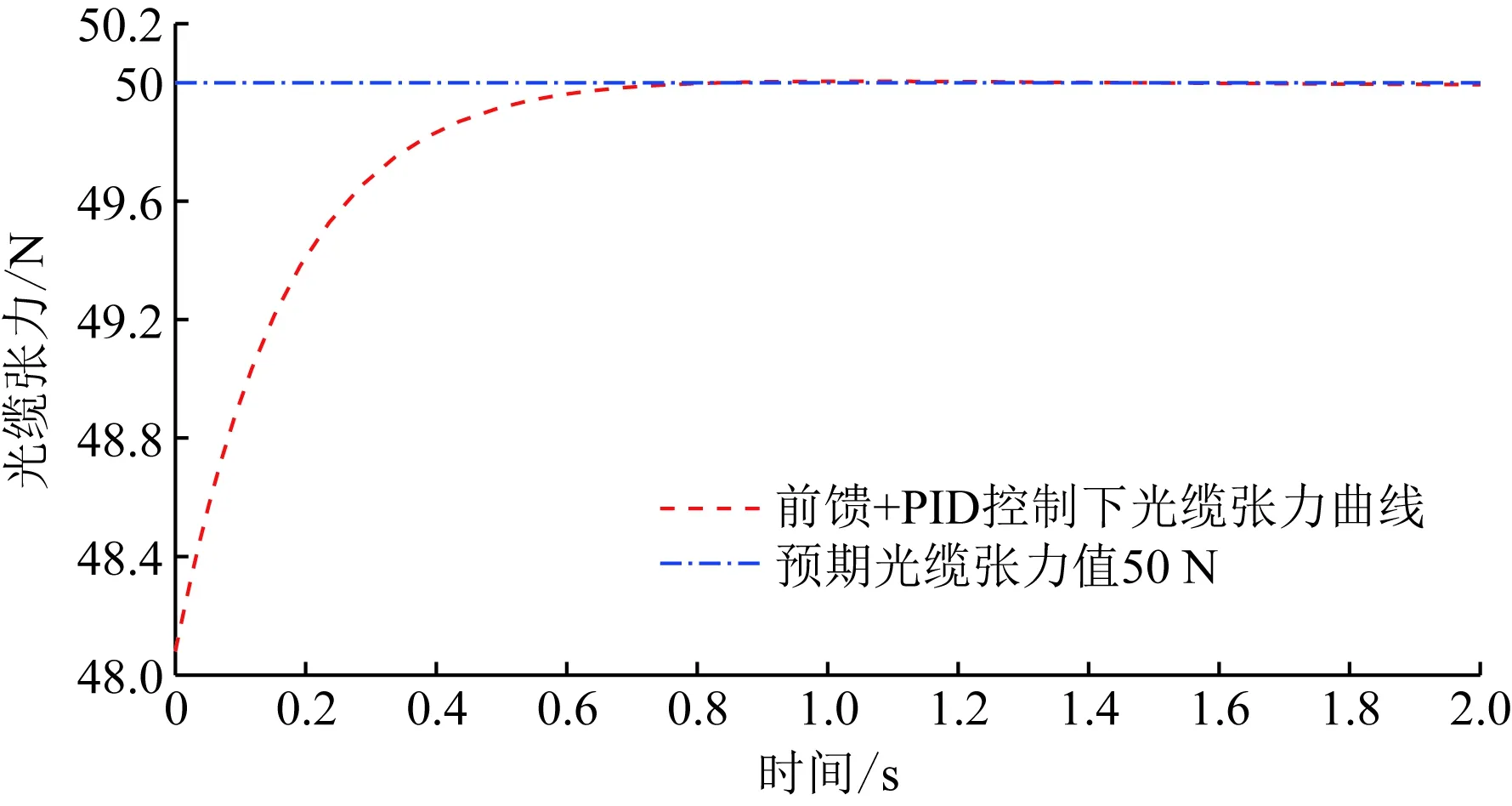
圖7 光纜張力變化仿真結(jié)果Fig.7 Simulation results of cable tension variation
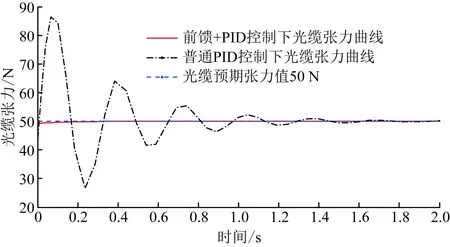
圖8 不同控制策略下光纜張力仿真結(jié)果Fig.8 Simulation results of cable tension under different control strategies
4 控制系統(tǒng)的軟硬件實(shí)現(xiàn)
4.1 控制系統(tǒng)總體方案
控制器是整個(gè)控制系統(tǒng)的核心,要求其具有較高的邏輯控制能力、高可靠性和抗干擾能力,可以適應(yīng)工業(yè)自動(dòng)化及智能化需求[8]。根據(jù)收放線裝置的工作原理和控制需求,選擇可編程邏輯控制器(pogrammable lgic cntroller,PLC)作為核心控制器,具體控制系統(tǒng)結(jié)構(gòu)如圖9所示。

圖9 控制結(jié)構(gòu)框圖Fig.9 Control structure block diagram
測(cè)試車運(yùn)行時(shí),收放線裝置與測(cè)試車同步工作。系統(tǒng)采用Modbus協(xié)議,通過RS-485總線實(shí)現(xiàn)遠(yuǎn)程通信[9-12];壓力傳感器實(shí)時(shí)反饋光纜張力大小;PLC基于當(dāng)前的車速信息及張力改變離合器阻尼,實(shí)現(xiàn)收放光纜過程中張力的精確控制。
4.2 控制系統(tǒng)電路設(shè)計(jì)
控制系統(tǒng)接線如圖10所示。數(shù)字量I/O實(shí)現(xiàn)光纜收線、放線,運(yùn)行模式切換(X00、X01、X02)3個(gè)輸入信息;AD/DA端口能夠滿足傳感器信號(hào)采集和控制信號(hào)輸出的要求;采用RS485串口服務(wù)器滿足與上位機(jī)的通信需求;控制系統(tǒng)分別通過伺服驅(qū)動(dòng)器以及張力控制器控制伺服電機(jī)和離合器,在使收放線速度與測(cè)試車運(yùn)行速度同步的同時(shí)實(shí)現(xiàn)光纜張力控制。

圖10 主回路電路接線圖Fig.10 Schematic diagram of the main circuit
4.3 控制器的選型
選用PLC觸摸屏一體機(jī),實(shí)時(shí)了解車輛工作狀態(tài)與設(shè)備運(yùn)行情況。作為人機(jī)交互平臺(tái),觸摸屏上不僅可直觀方便地了解及改變電機(jī)和離合器參數(shù),而且能夠進(jìn)行參數(shù)的修改,使整個(gè)控制系統(tǒng)的結(jié)構(gòu)更加緊湊[13-14]。
控制器需要進(jìn)行遠(yuǎn)距離的信息通訊;因具有壓力傳感器的模擬信號(hào)反饋和張力控制器的控制輸出,需要具有AD/DA轉(zhuǎn)換端口;因手動(dòng)控制需要有一定數(shù)量的數(shù)字I/O點(diǎn)。結(jié)合以上控制需求,選用臺(tái)達(dá)MM-40MR-12MT-700-ES-E觸摸屏PLC一體機(jī)作為本裝置的控制設(shè)備,既滿足了相應(yīng)的控制功能需求,又有效地節(jié)約了硬件成本。
4.4 電機(jī)選型
本裝置驅(qū)動(dòng)電機(jī)需同時(shí)帶動(dòng)收放卷筒以及排線器。理論分析得到帶動(dòng)排線器所需最大電機(jī)扭矩為0.251 N·m。滾筒運(yùn)動(dòng)多變,纏繞在滾筒上的光纜多少不一,所以計(jì)算該裝置所需最大轉(zhuǎn)矩,并以此作為挑選電機(jī)的標(biāo)準(zhǔn)。經(jīng)過大量實(shí)驗(yàn)計(jì)算得出在光纜滿載,滾筒由靜止到啟動(dòng)這一狀態(tài)下所需轉(zhuǎn)矩為整個(gè)系統(tǒng)運(yùn)行全過程中的最大值。
當(dāng)200 m四芯鎧裝光纜全部盤繞在滾筒上時(shí)滾筒總重為8.1 kg。對(duì)滾筒進(jìn)行整體分析,由式(6)得滿載滾筒由靜止到啟動(dòng)的轉(zhuǎn)動(dòng)慣量:

(6)
式(6)中:J為轉(zhuǎn)動(dòng)慣量;m′為滾筒所承載光纜質(zhì)量;r1為滾筒內(nèi)筒有效半徑,取0.115 m;r2為最外層光纜有效半徑,取0.15 m。
收放線時(shí)光纜最高收放速度V′為10 m/s,滾筒半徑R為0.25 m。在此情況下電動(dòng)機(jī)所需轉(zhuǎn)矩為
T=JV′/R=5.787 N·m
(7)
綜上,總轉(zhuǎn)矩為分別驅(qū)動(dòng)排線器與收放卷筒之和除以機(jī)械效率0.8,大小為7.836 N·m。電機(jī)所需功率可經(jīng)式(8)計(jì)算得出,大小為1.641 kW。
T′=9 550P/n
(8)
式(8)中:T′為系統(tǒng)所需轉(zhuǎn)矩;P為系統(tǒng)所需功率;n為電機(jī)額定轉(zhuǎn)速。
綜合電機(jī)所需最大扭矩以及所需功率大小,選擇臺(tái)達(dá)C310-20型號(hào)的伺服電機(jī)作為動(dòng)力源,并選用與之配套的驅(qū)動(dòng)器,電機(jī)詳細(xì)數(shù)據(jù)如表2所示。

表2 電機(jī)技術(shù)參數(shù)表Table 2 Technical parameters of motor
4.5 張力控制元件選型
收放光纜時(shí),卷徑的改變和測(cè)試車的不規(guī)則運(yùn)動(dòng)均會(huì)導(dǎo)致光纜受到?jīng)_擊。因此采用可控磁粉離合器輔助光纜收放,實(shí)現(xiàn)柔性化動(dòng)力傳輸。結(jié)合上文所得數(shù)據(jù)以及控制需求,選用有過載保護(hù)、無振動(dòng)沖擊、控制精度高、響應(yīng)速度快,型號(hào)為TL-POD-1.5的雙軸磁粉離合器。其額定轉(zhuǎn)矩為12 N·m,滑差功率為150 W,可以很好地滿足設(shè)備運(yùn)行需求。
5 控制程序設(shè)計(jì)
控制系統(tǒng)具有手動(dòng)調(diào)試、自動(dòng)運(yùn)行兩個(gè)操作模式。①手動(dòng)控制:便于設(shè)備人工調(diào)試及參數(shù)調(diào)整;②自動(dòng)控制:滿足設(shè)備運(yùn)行時(shí)光纜的同步自動(dòng)收放要求。兩個(gè)子程序嵌套在主程序中,主程序按照一定的條件和順序調(diào)用各功能子程序,完成設(shè)備要求的功能。
5.1 手動(dòng)控制程序設(shè)計(jì)
手動(dòng)控制模式下按動(dòng)相應(yīng)的按鈕,程序接收到收(放)線信號(hào),電機(jī)完成相應(yīng)的動(dòng)作,從而進(jìn)行設(shè)備調(diào)試,控制系統(tǒng)流程圖如圖11所示。

圖11 手動(dòng)調(diào)試程序設(shè)計(jì)流程圖Fig.11 Flow chart of manual operation program design
5.2 自動(dòng)收放線程序設(shè)計(jì)
自動(dòng)收放線模式下,收放線裝置會(huì)根據(jù)壓力傳感器及上位機(jī)傳回?cái)?shù)據(jù)自動(dòng)匹配相應(yīng)收放線速度,自動(dòng)控制模式下無需人員操作,其控制流程如圖12所示。
5.3 人機(jī)交互界面設(shè)計(jì)
根據(jù)收放線裝置的控制要求,設(shè)計(jì)該設(shè)備的人機(jī)交互界面,可以對(duì)光纜與測(cè)試車運(yùn)動(dòng)情況進(jìn)行實(shí)時(shí)監(jiān)控,顯示電機(jī)轉(zhuǎn)速、滾筒轉(zhuǎn)速、離合器阻力狀態(tài)、當(dāng)前車速與位置、光纜張力、電機(jī)當(dāng)前工況等。人機(jī)交互界面如圖13所示。

圖12 自動(dòng)收放線程序設(shè)計(jì)流程圖Fig.12 Flow chart of automatic cable wiring program design
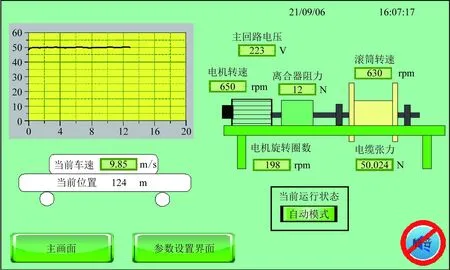
圖13 收放線裝置觸摸屏主屏幕Fig.13 Main screen of control system
6 同步收放線裝置的現(xiàn)場(chǎng)應(yīng)用
所設(shè)計(jì)的光纜恒張力同步收放線裝置實(shí)物如圖14所示。
壓力傳感器組成張力反饋系統(tǒng),監(jiān)測(cè)系統(tǒng)運(yùn)行時(shí)光纜張力的變化;控制器通過張力反饋值實(shí)時(shí)調(diào)整離合器的阻尼,實(shí)現(xiàn)光纜的恒張力收放;機(jī)構(gòu)通過兩級(jí)緩沖裝置,減少了光纜在收放操作時(shí)所受沖擊。所設(shè)計(jì)的收放線裝置通過現(xiàn)場(chǎng)實(shí)測(cè)具有響應(yīng)速度快、收放線精細(xì)化程度高、張力控制準(zhǔn)確等優(yōu)點(diǎn),延長(zhǎng)了光纜的使用壽命,可滿足不同應(yīng)用場(chǎng)景下高速收放線的需求。
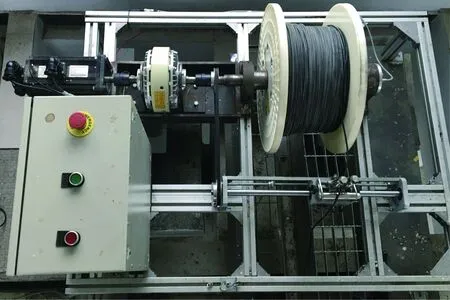
圖14 收放線裝置實(shí)物圖Fig.14 Actual drawing of cable wiring device
7 結(jié)論
針對(duì)無人駕駛測(cè)試系統(tǒng)的通訊光纜同步收放問題進(jìn)行了研究,所設(shè)計(jì)的同步收放線裝置結(jié)構(gòu)合理,控制性能好,反應(yīng)速度快,可滿足光纜恒張力收放的要求。
(1)采用兩級(jí)緩沖裝置使光纜與測(cè)試車柔性連接,極大程度上減少了光纜所受沖擊。
(2)壓力傳感器反饋光纜張力大小,選用前饋+PID閉環(huán)反饋的控制方法實(shí)現(xiàn)了離合器阻力的精確控制,保證收放線時(shí)光纜的恒張力收放。
(3)運(yùn)用MATLAB/SIMULINK平臺(tái)對(duì)所提出的控制策略進(jìn)行了仿真模擬,仿真結(jié)果表明該方法可以保證光纜張力穩(wěn)定在設(shè)定值。
(4)所開發(fā)人機(jī)交互界面友好,功能豐富,具有手動(dòng)及自動(dòng)控制功能。
本文系統(tǒng)適用性強(qiáng),可用于造紙、紡紗等企業(yè)對(duì)加工材料的張力控制及野外應(yīng)急通訊下通訊線纜的布設(shè)及回收,也可為相關(guān)的設(shè)計(jì)提供參考。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32