基于改進離散灰色預測的變論域模糊PID灌溉控制
2022-07-28 12:59:46謝佩軍張育斌吳文賢
節水灌溉 2022年7期
關鍵詞:模型
謝佩軍,張育斌,吳文賢
(1.浙江紡織服裝職業技術學院機電與軌道交通學院,浙江 寧波 315211;2.西安交通大學機械制造系統工程國家重點實驗室,西安 710054)
0 引 言
我國農業灌溉用水量大,傳統水肥灌溉技術的水肥利用率低、浪費嚴重,國家高度重視農業節水灌溉技術。《“十四五”全國農業農村科技發展規劃》明確提出,加強水肥精準管控,研發高效節水灌溉、測土配方施肥等現代節水節肥技術,建立高效節水灌溉、肥料緩釋等技術體系。水肥灌溉系統按照作物生長期各階段的養分需求,以有效提升水肥利用率和提高作物產量為目標,根據灌溉控制策略自動調節灌溉肥液濃度和數量,減輕農藥、化肥對農業生態環境的污染。水肥灌溉控制對象存在非線性、時變性和大慣性等問題,難以建立精確的數學模型。灌溉控制策略是水肥灌溉系統的關鍵技術,決定了系統的精準化和智能化程度。國內針對智能灌溉控制的研究主要采用PID控制技術和模糊控制策略,相關研究取得了一定成效。傳統PID 控制結構簡單、參數易整定、魯棒性強[1-3],對于灌溉系統的非線性、時變性和時滯性,PID控制參數調整的復雜程度大幅增加,且控制精度無法滿足灌溉控制實際需求。近年來,智能算法在優化控制參數、提升控制效果等方面呈現明顯優勢。許景輝等[4]采用SOA(人群搜索算法)實現PID 控制參數的自動優化、提高水泵控制精度,宋卓研等[5]利用PSO(粒子群優化算法)和BP神經網絡算法雙向優化PID 參數,有效提升了控制效果,但均存在建模難度大、模型適用性不強等問題。而模糊控制無需建立數學模型[6],且能夠有效解決非線性問題。朱德蘭等[7]結合PID 控制和模糊控制策略設計了遠程灌溉控制系統,能夠滿足特定條件下的遠程水肥灌溉控制需求。劉洪靜等[8]提出基于FPID 算法的智能灌溉控制系統,通過仿真驗證了系統的超調量小、魯棒性好,具有一定的節水灌溉應用價值。李嵩等[9]提出粒子群算法(PSO)優化FPID 控制,有效提高了系統響應速度和水肥配比精度。以上基于FPID 的灌溉控制均能夠一定程度上滿足水肥控制要求,但作物灌溉需求易受生長期、土壤、天氣等動態因素影響,而FPID 控制無法自適應調整模糊規則,從而易產生較大控制誤差,且仍存在時滯性問題。
為了進一步提高控制性能滿足實際灌溉控制要求,引入變論域思想通過論域伸縮自適應調節控制器參數[10-12],可以有效提升控制器的自適應能力和控制精度。灰色預測模型(GM)是灰色系統理論的核心內容[13],是解決不確定性系統規律預測問題的有效方法,被廣泛應用于諸多領域的預測系統[14-18]。水肥氣灌溉控制系統是非線性、時滯性的不確定復雜系統,屬于典型的灰色系統。針對智能灌溉系統的實時決策和精量灌溉問題,本研究融合PID控制的良好適應性和模糊控制的非線性控制效果,通過論域伸縮提高控制精度,建立新型變論域模糊PID 控制器(NVUFP)。結合改進離散灰色預測控制(IDGM)的超前控制能力,有效改善灌溉系統的大時滯問題,確保系統具有理想的控制精度和動態響應性能,為智能灌溉系統提供控制算法支持。
1 水肥氣智能灌溉系統
水肥氣灌溉系統是水肥一體化技術融合增氧灌溉的新型智能灌溉系統,主要由供水組件、供肥組件、增氧組件和控制組件構成,系統結構如圖1所示。供水組件主要包括儲水池、變頻水泵和供水管路等。供肥組件主要包括母液罐、過濾器、變頻吸肥泵、文丘里管和供肥管路等。增氧組件主要包括增氧罐(微納米氣泡發生器)、溶解氧(DO)檢測管路、增氧泵、氣液混合泵和氣液分離罐等。控制組件主要包括上位機、EC/pH傳感器、DO傳感器、流量計、壓力表和控制器等,實時采集EC值、pH值、流量值、壓力等各類信息進行動態分析與決策,實現水肥氣灌溉的智能控制。

圖1 水肥氣智能灌溉系統Fig.1 Intelligent oxyfertigation system
2 肥液EC/pH模型分析
肥液電導率EC值和酸堿度pH 值是肥液檢測的重要指標[19,20],建立EC/pH 模型是設計高精度灌溉控制器的基礎,灌溉系統通過變頻器和泵電機信號反饋實現控制,屬于典型一階純滯后系統。水肥氣灌溉系統中EC/pH 傳感器模塊實時檢測灌溉水肥溶液,將檢測結果反饋至控制器進行分析決策,建立EC/pH 傳感器模塊數學模型,實現對灌溉施肥過程進行實時監測。水肥氣灌溉溶液是融合各種肥料的溶液,肥液電導率EC值可以表征溶液濃度變化,考慮到EC值與灌溉肥液濃度存在著線性相關性,間接測量灌溉混合液肥素的濃度值。EC傳感器模型的傳遞函數可表示為:

式中:X(s)為灌溉水肥混合液濃度函數;σ(s)為灌溉水肥混合液電導率函數。
酸堿度pH 值也是灌溉過程中的重要指標,通常灌溉系統設有酸堿度調節通道,調節水肥混合液的酸堿度來調整土壤環境。選用pH 復合電極作為檢測傳感器,根據電極電勢差計算溶液的pH值。pH傳感器模型的傳遞函數可表示為:

式中:pH(s)為灌溉水肥混合液pH 函數;X(s)為灌溉水肥混合液濃度函數。
3 NVUFP水肥氣灌溉控制
3.1 FPID灌溉控制
PID 控制算法簡單、可靠性高、參數易調整,是水肥氣灌溉控制系統的主要控制方法。PID 控制器由比例環節、積分環節和微分環節組成,根據灌溉控制系統的水肥氣決策施用量和實際施用量構成控制偏差,實時控制變頻吸肥泵、增氧泵、電磁閥等控制對象調節灌溉水量、施肥量和增氧量。假設PID輸入水肥氣決策施用量r(t)與實際施用量u(t)的差值e(t),輸出實際施用量u(t),則系統的輸入輸出關系表示為:

式中:KP為比例系數;TI為積分時間常數;TD為微分時間常數。
雖然常規PID控制器結構簡單、適應性好,但對于水肥氣灌溉系統的非線性、時變性和時滯性,其KP、TI和TD3個參數的調整復雜程度大幅增加,且控制精度無法滿足智能灌溉要求。模糊控制無需建立數學模型,能夠有效改善灌溉控制的非線性和時變性。模糊控制的各參數需通過隸屬函數確定其修正值,隸屬函數表征一個參數對于某個集合的隸屬度。FPID 控制的3 個參數分別根據實際情況和經驗建立隸屬函數,通過隸屬函數建立模糊邏輯規則表并調整參數,FPID 灌溉控制原理如圖2所示。
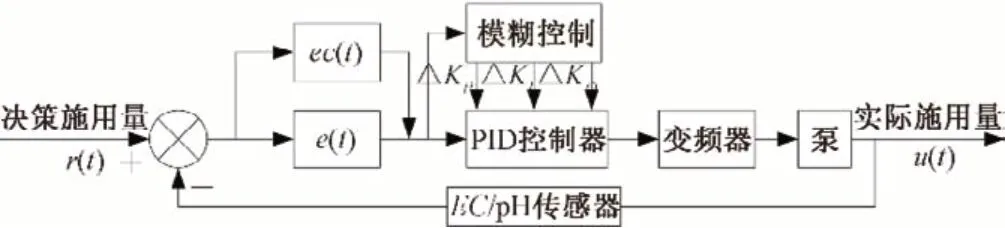
圖2 FPID灌溉控制Fig.2 FPID irrigation control
FPID 水肥氣控制將模糊推理融入PID 控制,模糊控制器采用雙輸入三輸出結構,偏差e(t)和偏差變化率ec(t)作為輸入量經模糊化、模糊推理和模糊決策,輸出PID 控制器的3 個控制參數修正量ΔKP、ΔKI、ΔKD,在線實時修正PID控制參數滿足系統需求,有效提高系統的動態響應性能。
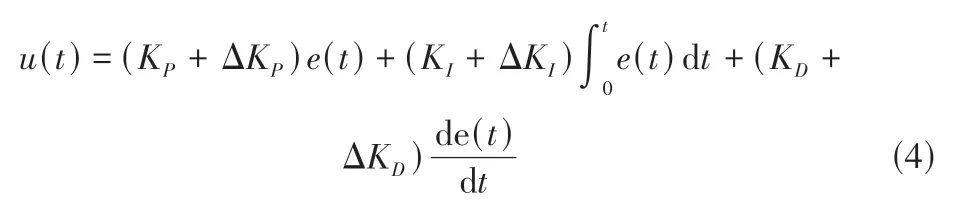
式中:KI=KP/TI,為積分系數;KD=KP/TD,為微分系數。
根據模糊子集制定規則和水肥氣系統的實際控制要求,定義e(t)和ec(t)的模糊語言值為:“負大NB”為(-∞,-2),“負中NM”為(-3,-1),“負小NS”為(-2,0),“零ZO”為(-1,1),“正小PS”為(0,2),“正中PM”為(1,3),“正大PB”為(2,+∞),相應模糊子集的論域為{-3,-2,-1,0,1,2,3}。根據e(t)和ec(t)的值建立隸屬函數,均采用三角隸屬度函數。以水肥氣灌溉系統的EC/pH 值變化規律為依據,綜合分析灌溉系統的超調量、響應速度等因素,制定FPID控制器3個參數的模糊控制規則,如表1所示。
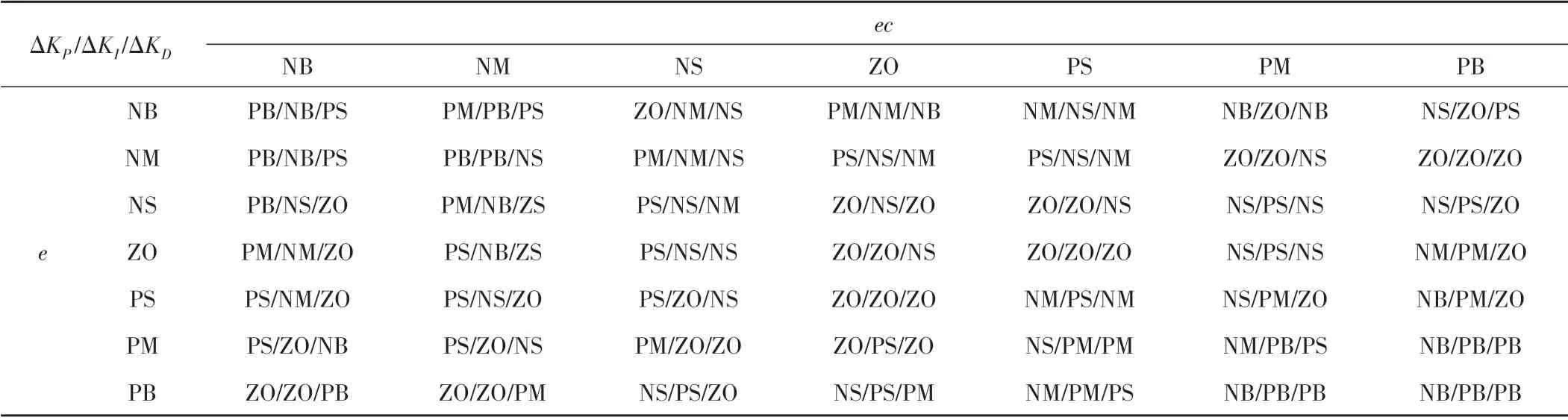
表1 模糊控制規則表Tab.1 Fuzzy control rules
3.2 NVUFP灌溉控制
灌溉系統受天氣、環境等因素影響動態變化大,為了提高模糊控制規則的適應性和控制參數的準確性,引入變論域思想構建VUFP 控制器。FPID 控制器的控制精度很大程度上決定于論域范圍大小和模糊等級劃分,VUFP 能夠在不改變模糊等級的情況下,通過伸縮因子實時調整模糊控制器的輸入、輸出變量論域[21]。分別設輸入變量e(t)和ec(t)的初始論域為[-E1,E1]和[-E2,E2],輸出變量的初始論域為[-U,U],引入伸縮因子的變論域公式為:
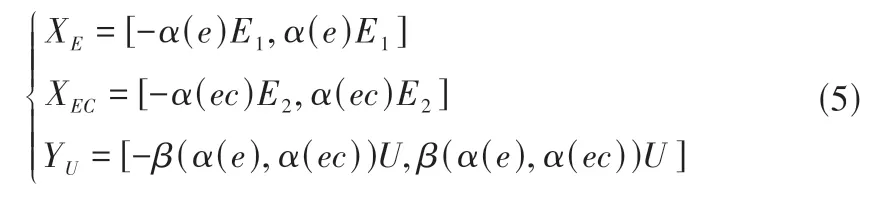
式中:α(e)為e(t)的伸縮因子;α(ec)為ec(t)的伸縮因子;β(α(e),α(ec))為ΔKP、ΔKI、ΔKD共同的伸縮因子。
由于灌溉系統具有非線性、時滯性等特點,在實際灌溉控制過程中難以對任意伸縮因子
建立完善的模糊控制規則。伸縮因子是決定變論域控制器性能的關鍵要素,基于函數模型的論域伸縮因子直接選用某些特殊函數,能夠有效避免缺乏完善模糊規則導致的系統控制性能降低。本文結合文獻參考和實驗分析[22,23],選擇基于以下函數模型研究變量論域伸縮因子:
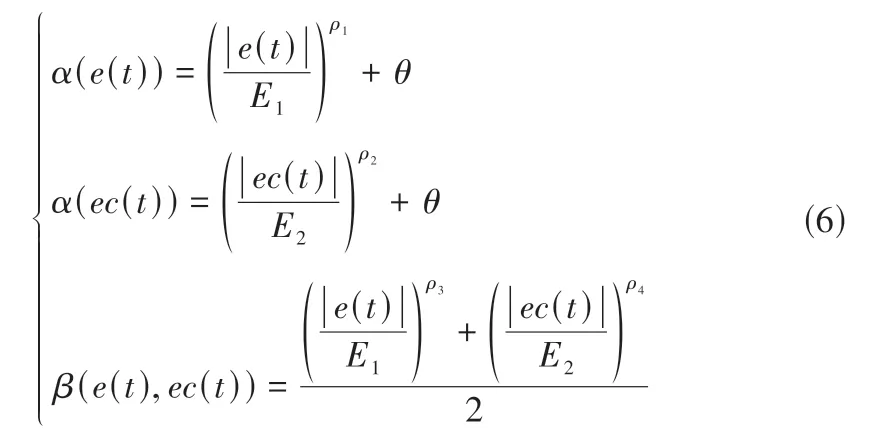
式中:θ是因子常量,為充分小的正數;E1、E2為初始論域邊界;ρi為因子設計參數,ρi∈[0,1]。
伸縮因子設計參數ρi無具體物理意義,尚無普遍適用的選值方法,通常跟據工程應用實際情況人為設定。結合水肥氣灌溉系統控制具體要求,綜合考慮伸縮因子選取原則、多次系統調試和實驗對比分析,本文提出根據灌溉系統的輸入變量e(t)和ec(t)進行實時調整因子設計參數:

式中:υ為充分小正數,υ∈(0,1)。
確保系統變量的協調性,令ρi(i= 1,2,3,4)均相等。代入公式(6)可以得到新型伸縮因子:
穩定有效的伸縮因子能夠保證控制系統迅速調整輸入偏差和偏差變化率,因此選取伸縮因子應遵循嚴格的選擇原則,下面對新型函數型伸縮因子的對偶性、單調性和正規性等性能進行驗證。
(1)對偶性。論域關于原點中心對稱,滿足對偶性保證論域兩邊伸縮比例一致。

(2)單調性。由上文可知對于任意e1(t)、e2(t) ∈[0,1],令e1(t) ≤e2(t)則有:
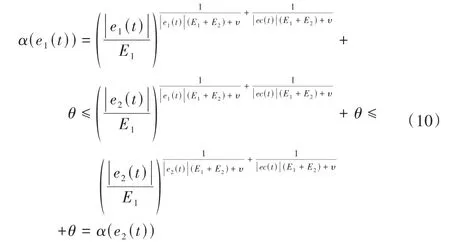
即α(e1(t)) ≤α(e2(t))滿足嚴格單調,保證論域對稱且伸縮比例一致。
(3)避零性。由于ρi∈[0,1],令e(t) →0時則有:

滿足避零性原則即確保伸縮因子不為零,從而避免隸屬度函數收縮至“零點”。
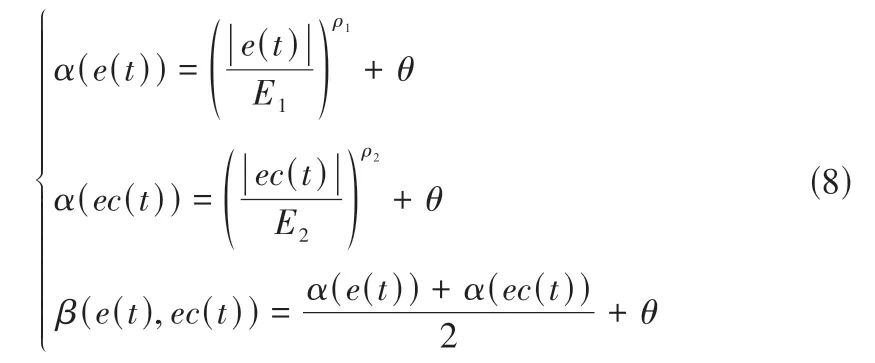
(4)協調性。根據公式(8)可得到:

因ρ1∈[0,1],且α(e(t)) ∈[0,1],則有:

可見滿足協調性原則,保證任何情況的論域伸縮調整均不超出初始論域邊界。
(5)正規性。當e(t)取論域邊界值,即e(t)= ±E1,ρ1= 1時有:
α(e(t))滿足正規性原則,確保變論域模糊控制器初始采樣偏差有實際意義。
按上述步驟同樣可以驗證α(ec(t))也滿足以上5 條穩定性原則,由公式(8)可知β(e(t),ec(t))是變量α(e(t))和α(ec(t))的線性組合,同樣可以驗證其滿足穩定性原則。因此,本文提出的新型函數型伸縮因子均滿足伸縮因子基本性質,基于新型伸縮因子構建NVUFP控制器應用于灌溉控制系統。
3.3 水肥濃度控制策略
NVUFP 灌溉系統以水肥氣決策施用量r(t)與實際施用量u(t)的偏差e(t)和偏差變化率ec(t)作為輸入,通過伸縮因子實時調整模糊控制器的變量論域。利用模糊控制規則進行模糊化和模糊推理得到PID控制器的修正量ΔKP、ΔKI、ΔKD,在線實時修正KP、KI、KD三個參數,控制變頻器實現水肥氣溶液的EC值和pH值動態調節,形成反饋控制流程如圖3所示。
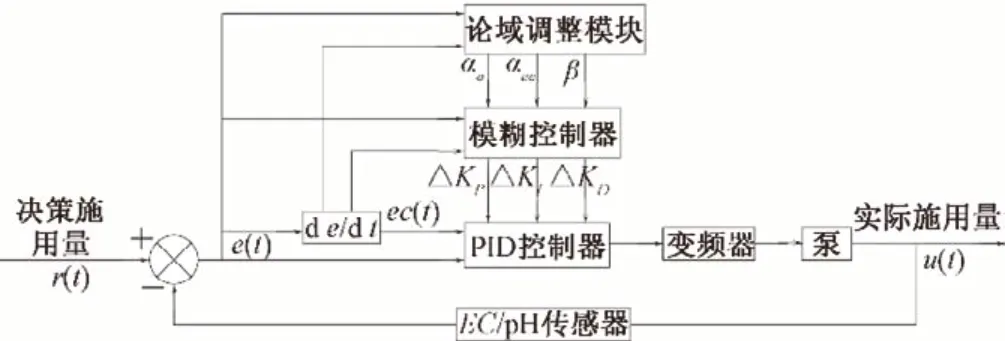
圖3 灌溉系統NVUFP控制結構圖Fig.3 NVUFP control structure diagram of irrigation system
(1)EC值控制策略。灌溉系統采用開環階躍響應檢測灌溉溶液的靜態增益,自適應FPID 控制原理圖如圖4所示。系統輸入信號r(t)是階躍信號時,灌溉系統獲得初始狀態值,自辨識決策模塊就會進行無擾動的切換,有效提高灌溉控制精度。
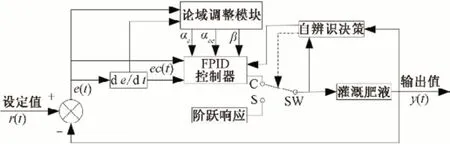
圖4 EC值控制原理圖Fig.4 EC control schematic diagram
(2)pH 值的控制策略。系統通過對初始設定值與實際檢測值的差值控制開關SW,實現對自適應FPID控制和階躍控制的模式切換,在線檢測灌溉管路中肥液酸堿度pH 值,反饋至灌溉決策模塊進行實時調控(見圖5)。
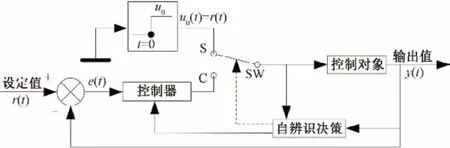
圖5 pH值控制原理圖Fig.5 pH control schematic diagram
(3)控制策略性能分析。在灌溉管道的毛管處檢測灌溉肥液濃度,分析EC值和pH 值控制策略性能。根據EC/pH 響應時間的變化,檢測不同時間段毛管處灌溉肥液的濃度變化,通過實驗數據分析和研究自適應FPID 控制的灌溉控制性能。
周期性采集毛管處灌溉肥液的EC值和pH 值得到控制曲線,如圖6所示,從圖6可以看出,灌溉管道毛管處周期性采集EC值和pH 值的實際擬合檢測曲線,與仿真器模擬曲線趨向保持很高的一致性。因此,可以認為上述控制策略適用于灌溉控制系統對肥液EC/pH 值的實時監測,為灌溉系統的肥液濃度智能控制提供了理想的控制策略。
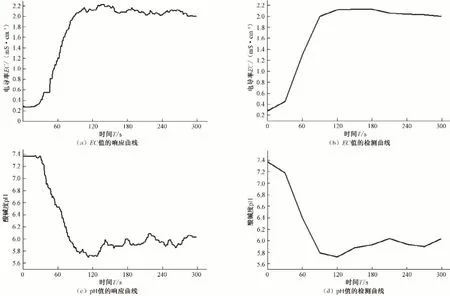
圖6 系統控制性能測試曲線圖Fig.6 Test curve of system control performance
4 基于IDGM的NVUFP灌溉控制
灌溉控制受作物需水量、天氣、土壤等諸多因素影響,不同時間段會表現出較大波動性,且通過灌溉管路輸送肥液系統具時滯現象。因此,灌溉系統是多因素、非線性的不確定復雜系統,有些因素明確可知,而有些因素未知或未確定,屬于典型的灰色系統。為了改進系統的時滯現象、控制精度等問題,建立離散灰色預測DGM(1,1)模型,提前預測灌溉肥液調節量,達到智能灌溉系統的精量灌溉要求。
灰色預測能夠對控制系統未來輸出進行預測,具有較好的超前性和自適應性,灰色預測模型GM(1,1)提出以來被廣泛用于各類預測與決策[24,25]。但由于GM(1,1)模型參數估計采用離散形式,而模擬預測采用連續形式,導致實際工程應用中預測精度不高,本文提出改進型離散灰色預測模型(IDGM(1,1))可有效改善預測精度。
4.1 DGM(1,1)模型
分析灌溉系統特點和水肥氣控制策略,根據灰色預測模型的動態特點,建立DGM(1,1)模型,利用灌溉系統旁路管道的肥液流量作為控制系統的反饋信號。
設X(0)為原始數據序列:

一次累加生成序列為:

其中:

上式即可表示為:

其中:=(β1,β2)為參數列,β1、β2通過最小二乘方法求得,即為一階單變量DGM(1,1)。
可設:
則灰色微分方程x(1)(k + 1)=β1x(1)(k) +β2的最小二乘估計參數列滿足:

取x(1)(1)=x(0)(1),則遞推公式為:

還原值為:

4.2 IDGM(1,1)模型
考慮到灌溉數據預測過程中模型訓練的初始灌溉數據不變,勢必影響DGM(1,1)模型的預測精度和預測結果,與實際灌溉情況存在差異。因此,分析更新初始灌溉數據,本文選用序列初始點的迭代初值為迭代基準,建立離散灰色預測模型:

利用迭代初始值增加修正項以反向抵消初始值帶來的誤差,從而有效解決迭代初值對預測模型擬合值的影響,以此建立IDGM(1,1):

其中=(β1,β2,β3)為參數列,參數β1、β2采用最小二乘法求解可得。而β3的求解采用類似最小二乘原則的方法,求解無約束優化模型的優化問題:

將所求得的β1、β2代入求解可得:
則IDGM(1,1)模型的遞推公式為:

序列的還原值為:

利用PID 控制和模糊控制的技術優勢,構建NVUFP 控制器,融合超前控制的灰色預測模型,實現時滯、非線性灌溉系統的實時決策和智能灌溉,控制原理圖如圖7所示。
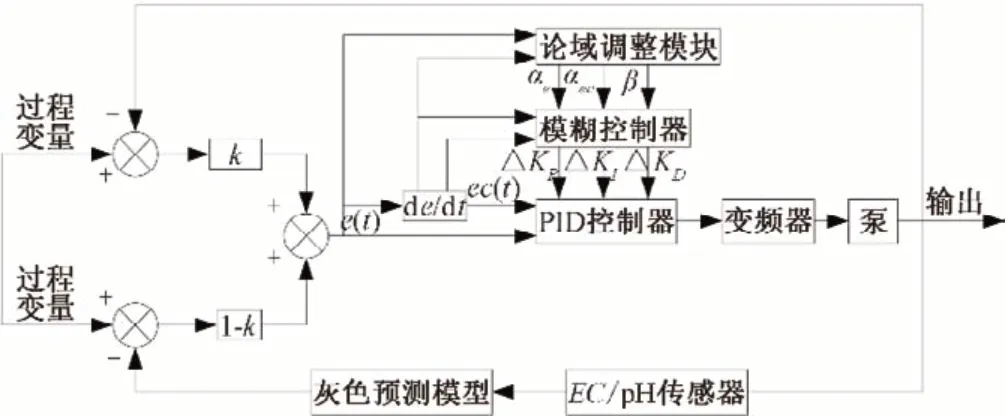
圖7 基于IDGM的NVUFP控制原理圖Fig.7 NVUFP control schematic diagram based on IDGM
灌溉系統以EC/pH 傳感器反饋信號依據,由灰色預測決策模塊預測作物所需水肥量,給出水肥預測值信號;通過水肥決策方案對比匹配與水量比值的施肥量,確定水肥信號;再根據這組水肥預測信號,進行變論域模糊推理得到系統參數;最后經由控制器系數確定肥量輸出信號,實現變頻器、泵等執行機構的灌溉控制。
5 仿真實驗與測試分析
5.1 仿真實驗與分析
為了驗證基于IDGM 的NVUFP 的控制性能,在Matlab/Simulink 環境下進行仿真實驗分析模型性能指標,分別建立PID、FPID、NVUFP 和IDGM-NVUFP4個模型。根據灌溉控制實際情況,采用臨界比例法[26]設計3個參數初始值分別為KP0=12.14、KI0= 0.48、KD0= 0.08,各模型的PID 參數初始值采用相同數值。經現場試驗調試,NVUFP 和IDGM-NVUFP 模型參數設定為ρ1=ρ3= 0.85、ρ2=ρ4= 0.25。灌溉控制實驗的輸入單元采用階躍信號源進行水肥流量控制模擬仿真,得到仿真曲線如圖8所示。
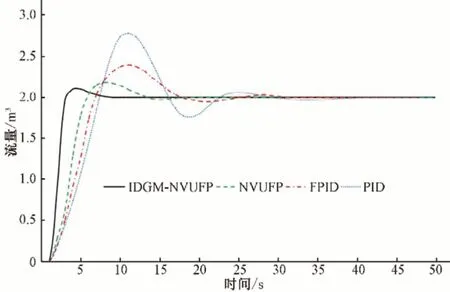
圖8 灌溉控制模型仿真圖Fig.8 Simulation diagram of irrigation control model
根據仿真曲線分析上述4個模型的控制效果,對比研究各模型的階躍響應曲線,計算分析模型性能指標,如表2所示。
從圖8和表2可知,常規PID 的超調量最大,系統響應時間最長,22 s 左右才趨于穩定狀態,NVUFP 和IDGM-NVUFP的超調量遠小于常規PID 和FPID,NVUFP 較FPID 減少了10.5%,而IDGM-NVUFP 的超調量更減少至5.1%。常規PID和FPID 的響應曲線均存在較大震蕩和一定的穩態誤差,NVUFP 略有小幅震蕩及0.002的穩態誤差,說明自適應變論域明顯改善了控制效果,IDGM-NVUFP 響應曲線平穩無震蕩且穩態誤差為0,說明系統控制精度和穩定性均得到優化。NVUFP 的上升時間和峰值時間分別為5.48 s 和7.24 s 均比常規PID 和FPID 小,尤其調節時間大幅度縮短至10.61 s,說明本文提出的新型函數型伸縮因子較好地提升了控制器的自適應能力,融合離散灰色預測的IDGM-NVUFP 進一步縮短各項時間參數,優化控制模型響應性能,能夠有效改善灌溉系統的時滯性問題。

表2 控制模型性能指標Tab.2 Control model performance index
5.2 灌溉控制測試分析
為了檢驗所研究控制模型的實際灌溉應用效果,將控制器應用于智能灌溉設備開展灌溉控制測試實驗,驗證與評價控制器的控制性能。在保證灌溉環境條件相同的情況下,分別將PID、FPID、NVUFP 和IDGM-NVUFP 嵌入智能灌溉設備的控制系統進行水肥氣流量的實際控制測試。在寧波市農業科學研究院農業技術實驗園進行灌溉測試實驗,通過變頻恒壓供水系統保持主管水壓為0.35 MPa,采用電磁流量計(EMF-5000)實時檢測主管流量。測試母液采用碳酸氫銨配制成EC值為10 mS/cm 的灌溉肥液,由EC傳感器(JZ-DDL)檢測EC值,無線模塊將采樣數據發送至上位機。
灌溉控制策略設計在有效范圍內采集數據,考慮到灌溉肥液流動滯后的實際情況,灌溉過程中肥液經過流量計有一定的延時,在灌溉開始前2 s 均未見流量數據變化,流量值都為零。經過現場灌溉試驗與分析,電磁流量計的采樣周期為0.5 s 時能夠準確反映灌溉實際情況,且便于對比分析控制效果,故各組別流量數據的采樣周期均取0.5 s,每組連續采樣時間20 s。經過整理得到灌溉流量測試數據(表3)、流量偏差對比圖(圖9)和不同EC設定值檢測實驗對比結果(表4)。
從表3流量測試數據可知,對比PID 和FPID 控制,NVUFP 和IDGM-NVUFP 控制的灌溉系統肥液調節時間較短,NVUFP大約9 s左右達到穩態,IDGM-NVUFP控制實際肥液流量值最快達到設定值,大約7 s 左右能夠達到穩態,而PID 和FPID 控制的系統均需要13 s 以上,說明IDGM-NVUFP 控制的系統響應更迅速、控制性能更好。根據表4和圖9實際灌溉流量偏差的數據分析,實際灌溉過程PID、FPID 和NVUFP 控制均有不同程度震蕩從而造成灌溉肥液浪費,從灌溉開始到四個模型控制系統均達到穩定流量,IDGM-NVUFP 控制至少能夠節省15%的水肥用量。IDGM-NVUFP 穩態誤差比其他模型更小,系統平穩無震蕩,灌溉控制更精確、更節省水肥用量。
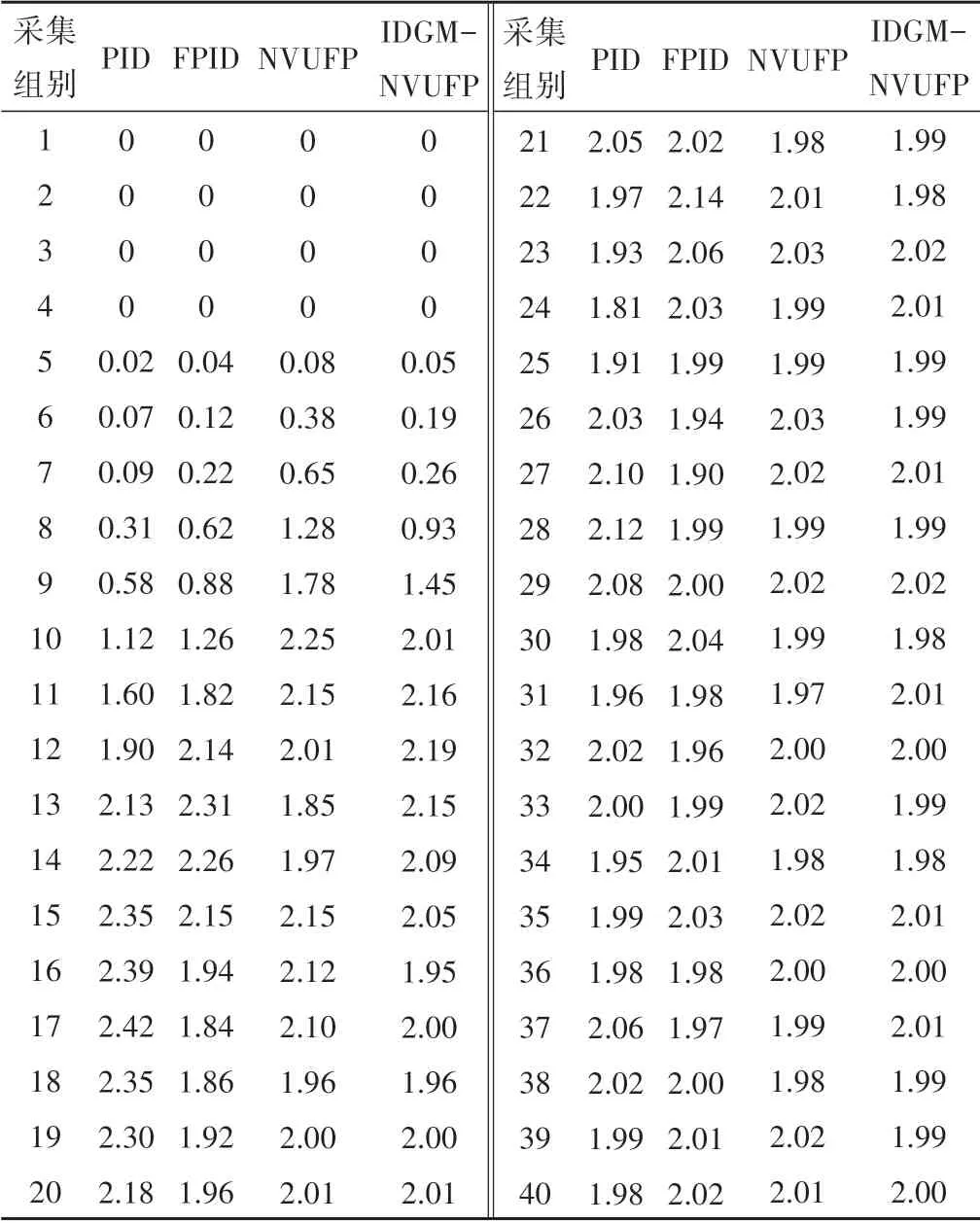
表3 灌溉流量測試數據表 L/minTab.3 Irrigation flow test data sheet
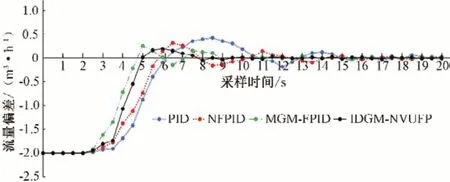
圖9 實際灌溉流量偏差對比圖Fig.9 Comparison chart of actual irrigation flow deviation
從表4不同的目標EC值檢測實驗結果可知,設定的目標EC值越大,則EC值的波動幅度越小,系統的穩態EC值控制越精確,目標EC值設定為3.0 mS/cm 時,IDGM-NVUFP 穩態EC值最小,穩定在2.98~3.01 mS/cm 區間;相同目標EC值的各模型數據對比分析,IDGM-NVUFP 相較于其他模型控制EC值波動幅度最小,系統的穩定性最強。因此,本文提出的IDGM-NVUFP 各項控制性能均優于其他控制模型,灌溉測試結果表明響應速度、控制精度和穩定性均能夠滿足實際灌溉系統需求,適用于智能灌溉系統的水肥氣控制。

表4 EC值檢測實驗結果 mS/cmTab.4 Test results of EC
6 結 論
(1)搭建了融合水肥一體化技術和增氧灌溉技術的水肥氣智能灌溉系統。為了對灌溉過程中肥液濃度進行實時監測,分析灌溉肥液的兩個重要指標電導率EC值和酸堿度pH 值,建立EC/pH傳感器模型,分別設計了EC值和pH 值的控制策略。
(2)設計了基于FPID 控制、變論域思想和灰色預測控制相結合的灌溉控制模型,在PID 控制基礎上融入模糊推理構建FPID 控制器,解決了灌溉控制的非線性問題;引入變論域思想設計了新型函數型伸縮因子實現變量論域自適應伸縮,有效提升了系統適應性和控制精度;結合具有超前控制能力的改進型離散灰色預測,提前預測肥液調節量,能夠實現大時滯、非線性灌溉系統的實時決策與智能灌溉。
(3)為了驗證灌溉控制模型的控制性能,建立了PID、FPID、NVUFP 和IDGM-NVUFP 四個控制模型進行仿真實驗與實際灌溉對比分析。實驗結果表明,IDGM-NVUFP 的超調量為5.1%,比FPID 降低14.5%,比NVUFP 降低4.0%,且IDGM-NVUFP 的上升時間、峰值時間和調節時間均比其他控制模型更短。灌溉測試驗證了基于IDGM-NVUFP 的灌溉控制系統在實際灌溉過程中響應速度快、控制精度高、穩定性好。因此,IDGM-NVUFP 灌溉控制模型,各項控制性能均優于其他模型,具有理想的動態響應性、控制精度和魯棒性,滿足實際灌溉控制需求,有效節省水肥用量,為智能、精準的水肥氣灌溉系統提供有力支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19