基于時延冗余測量的陣形校準(zhǔn)
2022-07-29 02:42:20宮在曉李整林李風(fēng)華郭良浩
聲學(xué)技術(shù) 2022年3期
何 琪,宮在曉,李整林,李風(fēng)華,郭良浩
(1.中國科學(xué)院聲學(xué)研究所聲場聲信息國家重點實驗室,北京 100190;2.中國科學(xué)院大學(xué),北京 100049;3.中山大學(xué)海洋工程與技術(shù)學(xué)院,廣東珠海 519000)
0 引言
陣形校準(zhǔn)精度對目標(biāo)測向性能有著顯著影響[1]。布放于海底的柔性水平陣,由于受到布放、內(nèi)波、浪涌等因素的影響,實際陣形往往與預(yù)設(shè)陣形有較大差異。進行陣列形狀校準(zhǔn)工作,可以提高后續(xù)信號處理算法的探測性能,尤其是各種自適應(yīng)算法的性能。
已有的陣形校準(zhǔn)方法大致分為兩類:一類為無源校準(zhǔn)[2-3],無需額外的校準(zhǔn)聲源,利用噪聲源就可以實現(xiàn),但是反演得到的是陣列形狀,只知道兩兩陣元之間的距離,需要額外信息對初步結(jié)果進行平移、旋轉(zhuǎn)、翻轉(zhuǎn)等操作才能獲取各陣元的準(zhǔn)確位置;另一類為有源校準(zhǔn)[4],通過利用校準(zhǔn)聲源,結(jié)合聲源與參考陣元的位置信息,測量各相鄰陣元間接收信號的時間延遲,從而獲得各陣元相對參考陣元的準(zhǔn)確位置;但由于淺海信道存在縱向相關(guān)振蕩現(xiàn)象[5],以及受到海洋環(huán)境噪聲等因素影響,傳統(tǒng)方法[4]會因為時延估計誤差累積造成校準(zhǔn)陣形的偏差。
本文提出基于時延冗余測量的陣形校準(zhǔn)方法,通過估計全部兩兩組合的陣元間的信號時延,充分利用數(shù)據(jù),可以有效提高校準(zhǔn)精度,并通過數(shù)值仿真與實驗對方法進行了驗證。
1 理論分析
1.1 信號模型
根據(jù)簡正波理論[6],在水平不變分層的海洋波導(dǎo)環(huán)境中,點聲源激發(fā)的單頻聲場可以表示為M階簡正波的線性疊加

其中:krm為第m階模態(tài)的水平波數(shù),Ψm為第m階模態(tài)的深度函數(shù),ρ(zs)為聲源處水介質(zhì)的密度,zs和z分別為聲源深度和接收深度,r為陣元與聲源間的水平距離。
假定在頻帶[fL,fH]內(nèi),聲源信號的頻譜為S(f),則第i號陣元接收該頻段信號的時域波形為

其中:ri為第i號陣元與聲源間的水平距離。
1.2 陣形校準(zhǔn)方法
校準(zhǔn)方法示意圖如圖1 所示,S1、S2分別為校準(zhǔn)聲源的位置,O為海底水平陣參考陣元的位置,Ai為某待校準(zhǔn)陣元的位置。
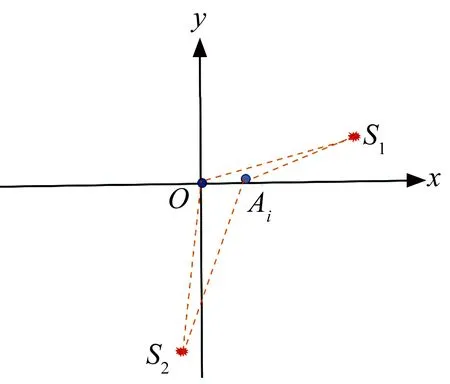
圖1 校準(zhǔn)方法示意圖 Fig.1 Schematic diagram of calibration method
已知聲 源S1(X1,Y1)、S2(X2,Y2)與參考陣元O(x1,y1)的GPS 位置信息,通過估計各陣元較參考陣元的信號到達時延,以求解Ai點坐標(biāo)(xi,yi):

選取目標(biāo)函數(shù)如下:
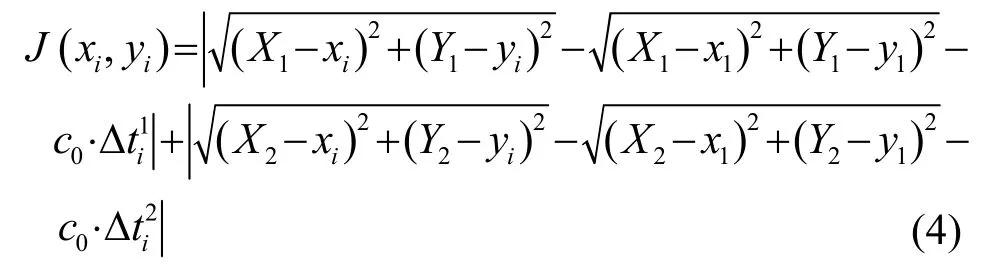
通過優(yōu)化搜索,可得Ai點坐標(biāo):

由于淺海信道存在縱向相關(guān)振蕩現(xiàn)象[5],同時受海洋環(huán)境噪聲等因素影響,簡單地以參考陣元為基準(zhǔn)估計時延存在誤差。
1.3 時延估計
任意兩個陣元間的信號時延可以根據(jù)相關(guān)峰的位置來估計:
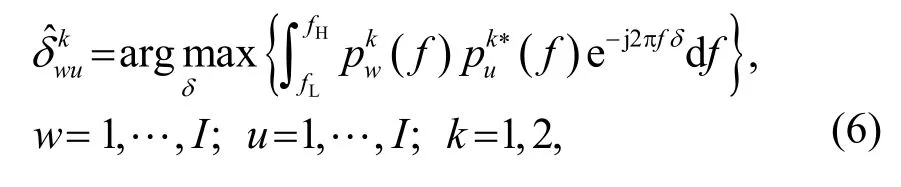
其中:上標(biāo)*表示取共軛,最大相關(guān)系數(shù)對應(yīng)的δ即為陣元Au相對于陣元Aw接收到聲源Sk的信號時延估計值。
測量全部陣元組合后,可得兩兩陣元間的時延估計矩陣Gk:
1.3.1 時延累計測量
在高信噪比和信號空間相關(guān)較好的理想條件下,文獻[4]近似為通過兩兩相鄰陣元的信號相關(guān)來估計時延,累計可得第i個陣元相對參考陣元的時延量為

進而估計陣形參數(shù)。
1.3.2 時延冗余測量
當(dāng)信噪比偏低、或者聲場相關(guān)存在起伏的情況下,僅僅測量(I? 1)個相鄰陣元的時延并沒有充分利用信號的空間信息。通過全部兩兩陣元組合進行次時延估計,然后由最小二乘方法計算第i個陣元相對參考陣元的時延量,可更好地對時延進行估計:

1.4 陣形校準(zhǔn)誤差
定義陣形校準(zhǔn)誤差為

2 數(shù)值仿真
2.1 波導(dǎo)環(huán)境參數(shù)
通過數(shù)值仿真來對比上述兩種時延估計方法用于陣形校準(zhǔn)的差異。根據(jù)實驗中測量的數(shù)據(jù)來設(shè)置聲場仿真所用的信道參數(shù),接收陣位置處實測聲速剖面如圖2 所示,水層介質(zhì)密度設(shè)為1 g·cm-3,海深設(shè)為 96 m,海水的聲吸收衰減系數(shù)設(shè)為0 dB·λ-1。海底假設(shè)為平坦半無限基底,聲速1 630 m·s-1,密度為 1.76 g·cm-3,衰減系數(shù)0.33 dB·λ-1。參考聲速選取為1 568 m·s-1,聲源深度設(shè)為50 m,接收陣列布放于海底。仿真信號頻段選為20~30 Hz,分辨率為0.2 Hz,采樣率設(shè)置為16 000 Hz,使用Kraken 程序[7]計算聲場。
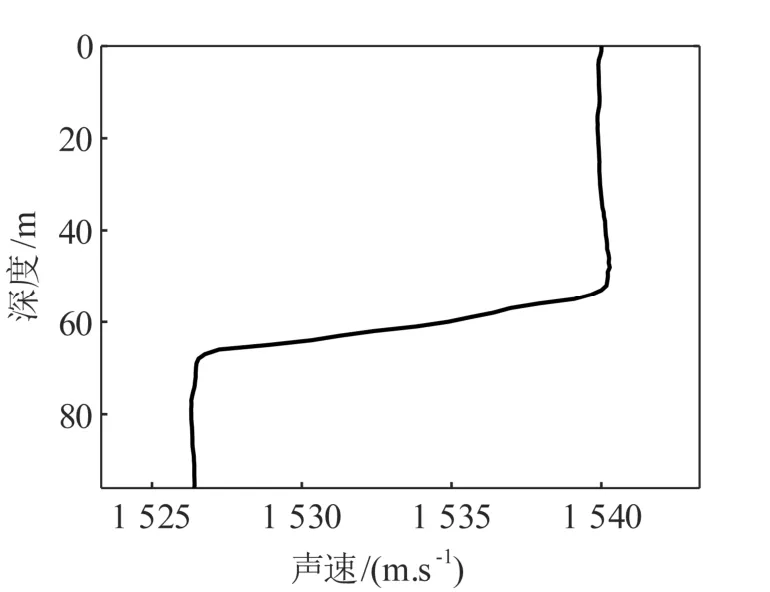
圖2 實測的聲速剖面 Fig.2 A measured sound velocity profile
2.2 陣形校準(zhǔn)
根據(jù)文獻[4]校準(zhǔn)聲源的最佳位置關(guān)系,布設(shè)校準(zhǔn)聲源位置如下:以x軸正半軸為0°方向,逆時針方向旋轉(zhuǎn)角度遞增,S1在參考陣元O的0°方向,距離為20 km;S2在參考陣元O的270°方向,距離為20 km。
信噪比為10 dB 時陣形校準(zhǔn)結(jié)果如圖3 所示,校準(zhǔn)陣列是陣元間距10 m 的11 元直線陣。
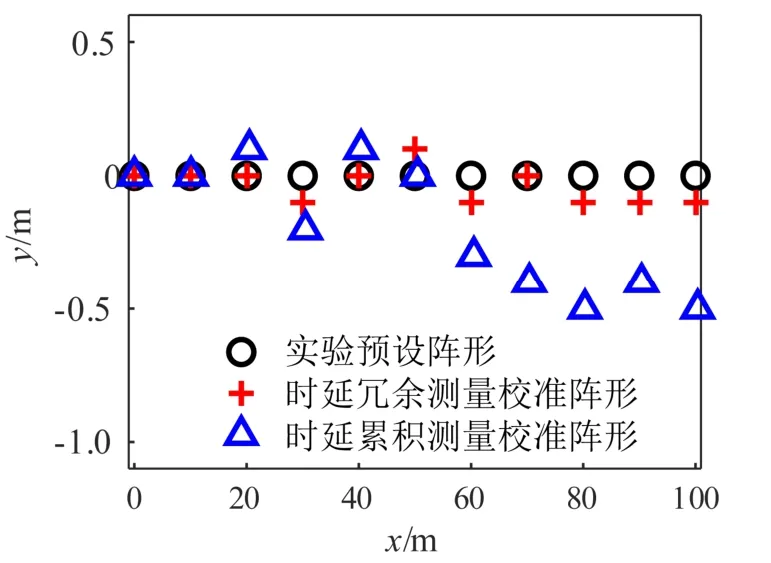
圖3 信噪比為10 dB 時兩種方法的陣形校準(zhǔn)結(jié)果 Fig.3 Array shape calibration results of the two methods when the SNR is 10 dB
由圖3 中的對比可以看出,基于時延冗余測量的陣形校準(zhǔn)結(jié)果明顯優(yōu)于基于時延累積測量的校準(zhǔn)結(jié)果。進一步考察不同信噪比下,兩種時延估計方法的陣形校準(zhǔn)精度。給接收信號添加不同大小的高斯白噪聲,并進行100 次蒙特卡洛仿真實驗。圖4 給出了信噪比在5~30 dB 范圍內(nèi)變化時,兩種方法陣形校準(zhǔn)誤差的均值與標(biāo)準(zhǔn)差。
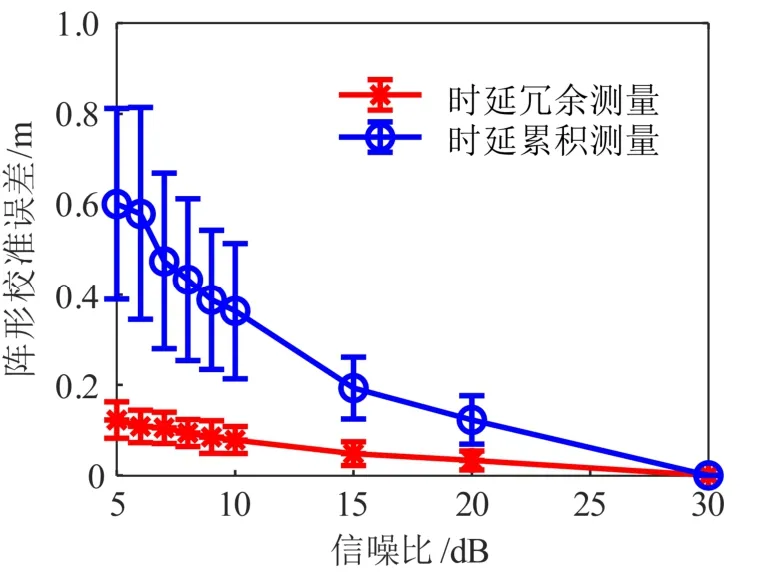
圖4 不同信噪比下兩種方法的陣形校準(zhǔn)誤差的均值與標(biāo)準(zhǔn)差 Fig.4 Means and standard deviations of the array shape calibration errors of the two methods under different signal to noise ratios
從圖4 可以看出,在信噪比大于30 dB 時,時延冗余測量方法和時延累積測量方法都可以準(zhǔn)確地實現(xiàn)陣形校準(zhǔn),而信噪比降低時,時延冗余測量的優(yōu)勢更為明顯,不僅誤差均值小,而且標(biāo)準(zhǔn)差也更小。如以誤差校準(zhǔn)精度0.1 m 為門限,冗余測量方法對信號的信噪比要求比累積測量方法低約10 dB。
3 實驗數(shù)據(jù)處理
3.1 實驗描述
2020 年9 月某近海實驗中,8 元水平接收陣布放于海底,陣列的信號采樣率為16 kHz,靈敏度為?170 dB,實驗船沿著測線投擲爆炸聲源,標(biāo)稱深度為50 m。實驗期間的聲速剖面、波導(dǎo)環(huán)境等參數(shù)與上文數(shù)值仿真所用參數(shù)一致。兩輔助聲源的布設(shè)位置與數(shù)值仿真接近,S1在參考陣元O的358.6°方向、距離19.67 km 處;S2在參考陣元O的269.4°方向、距離20.78 km 處,聲源的位置信息由船載差分GPS 獲得。由文獻[4]可知,當(dāng)校準(zhǔn)聲源按照最佳位置關(guān)系布放時,聲源位置的偏差對陣形校準(zhǔn)結(jié)果的影響較小。
3.2 處理結(jié)果
對接收信號進行20~30 Hz 帶通濾波處理,各陣元接收到的帶內(nèi)信號波形如圖5 所示,圖5(a)為對S1的接收信號,圖5(b)為對S2的接收信號。
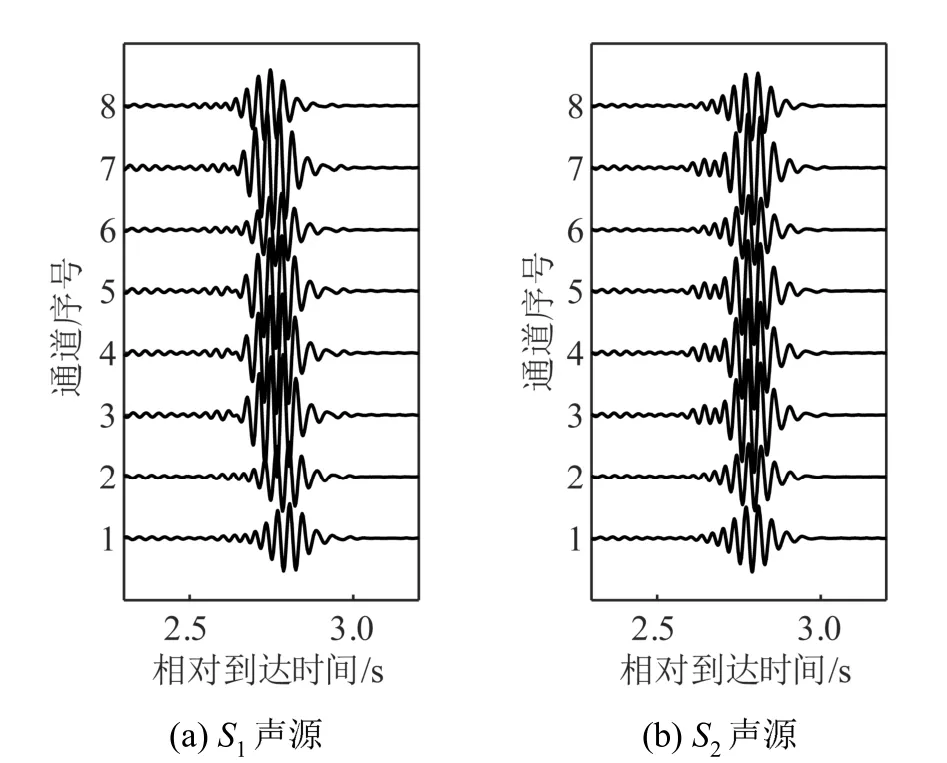
圖5 陣列接收的來自兩個聲源的信號波形 Fig.5 Signal waveforms received by the array from two sources
對濾波后信號分別用兩種方法進行時延估計,得到陣形校準(zhǔn)結(jié)果如圖6 所示,可以看出校準(zhǔn)后陣形與實驗預(yù)設(shè)的直線陣形差別較大。
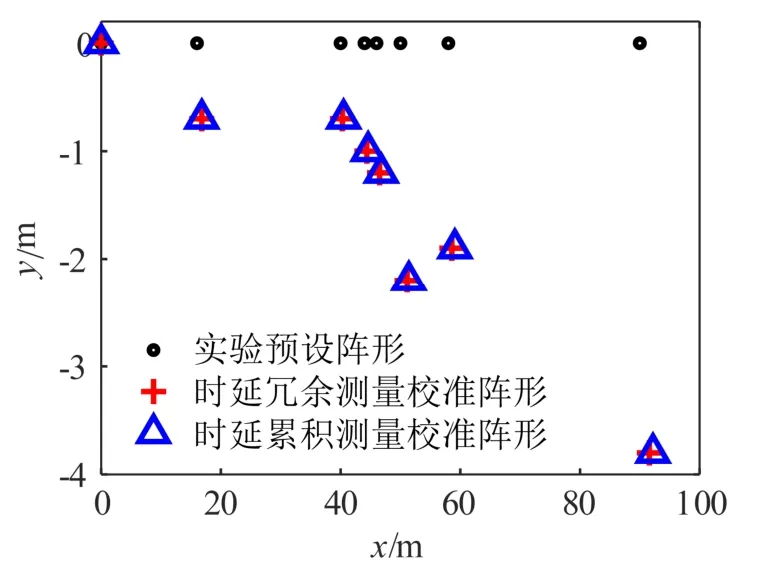
圖6 兩種方法進行接收信號時延估計得到的的陣形校準(zhǔn)結(jié)果 Fig.6 Array shape calibration results obtained by using the two methods to estimate the time delay of array received signals
為了驗證校準(zhǔn)陣形的有效性,對位于[參考陣元O269.4°方向、距離21.98 km]的測試聲源Stest的接 收信號進行波束掃描,并與實際結(jié)果進行比較。
圖7 給出了三種陣形數(shù)據(jù)對測試聲源信號的常規(guī)波束形成(Conventional Beamformer,CBF)結(jié)果,為了更好體現(xiàn)陣形準(zhǔn)確性對目標(biāo)測向的影響,選擇頻段為200~300 Hz。圖7(a)為根據(jù)實驗預(yù)設(shè)陣形CBF 波束掃描結(jié)果,其中目標(biāo)的方位角估計為88.6°與271.4°,不具備左右舷分辨能力。圖7(b)為根據(jù)冗余測量時延估計陣形校準(zhǔn)后CBF 波束掃描結(jié)果,其中目標(biāo)的方位角估計結(jié)果為269.4°。圖7(c)為根據(jù)相鄰累積時延估計陣形校準(zhǔn)后CBF 波束掃描結(jié)果,目標(biāo)的方位角估計結(jié)果為269.5°。由GPS 測量得到的方位角為269.4°,因此可以看出校準(zhǔn)后陣形CBF 測向更準(zhǔn)確,驗證了所提方法的有效性。
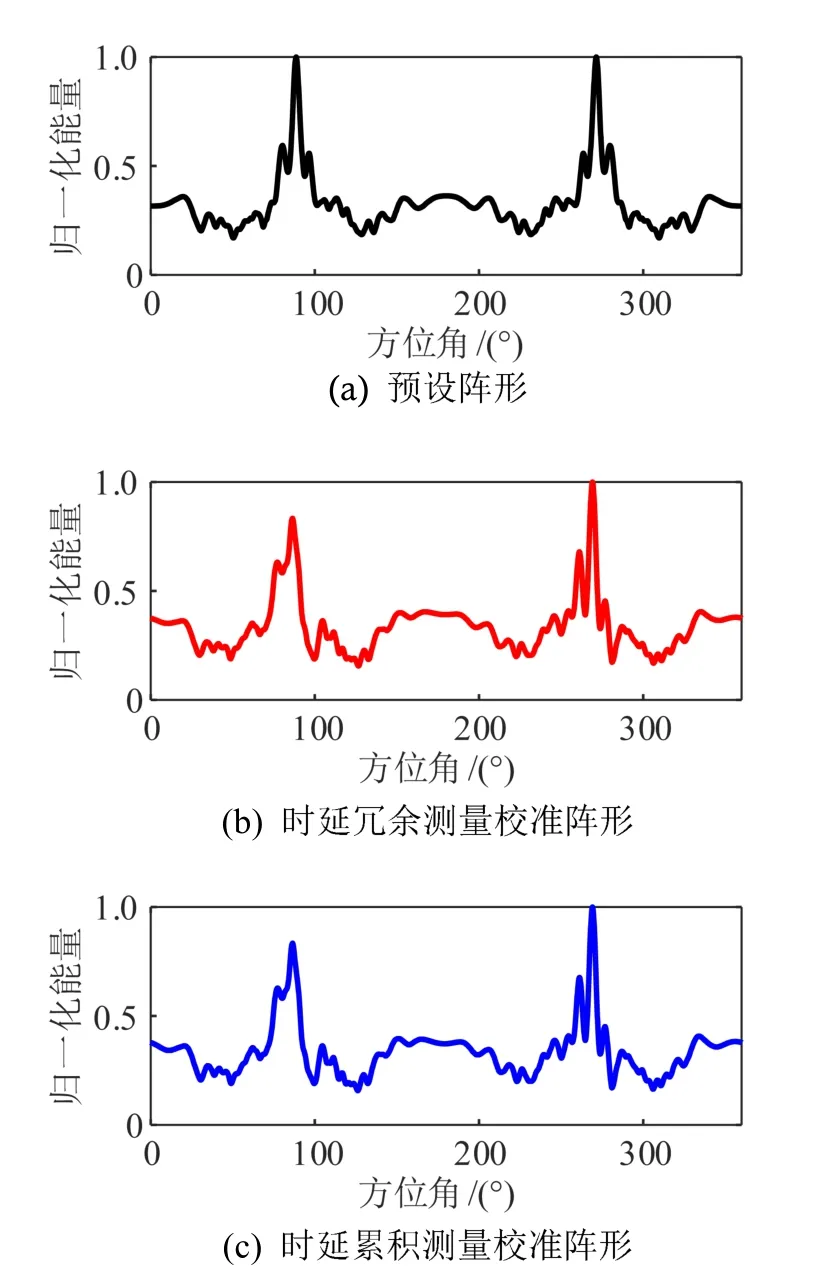
圖7 對圖6 中三種不同陣形的常規(guī)波束形成結(jié)果 Fig.7 Conventional beamforming results for the three different array shapes shown in Fig.6
3.3 進一步處理
從圖5 可以看出,由于各陣元接收信號的信噪比很高,兩種陣形校準(zhǔn)方法的差別并不明顯。對接收信號添加10 dB 的高斯白噪聲,加噪聲后陣列接收信號的時域波形如圖8 所示。進行50 次蒙特卡洛仿真實驗,以分析兩種方法的陣形校準(zhǔn)結(jié)果的穩(wěn)定性。陣形校準(zhǔn)結(jié)果如圖9 所示,當(dāng)接收信號信噪比降低后,圖9(a)中充分利用了信號的空間信息進行冗余時延估計,相較圖9(b)中時延累積方法的陣形校準(zhǔn)結(jié)果,校準(zhǔn)得到的陣元位置更加穩(wěn)定。
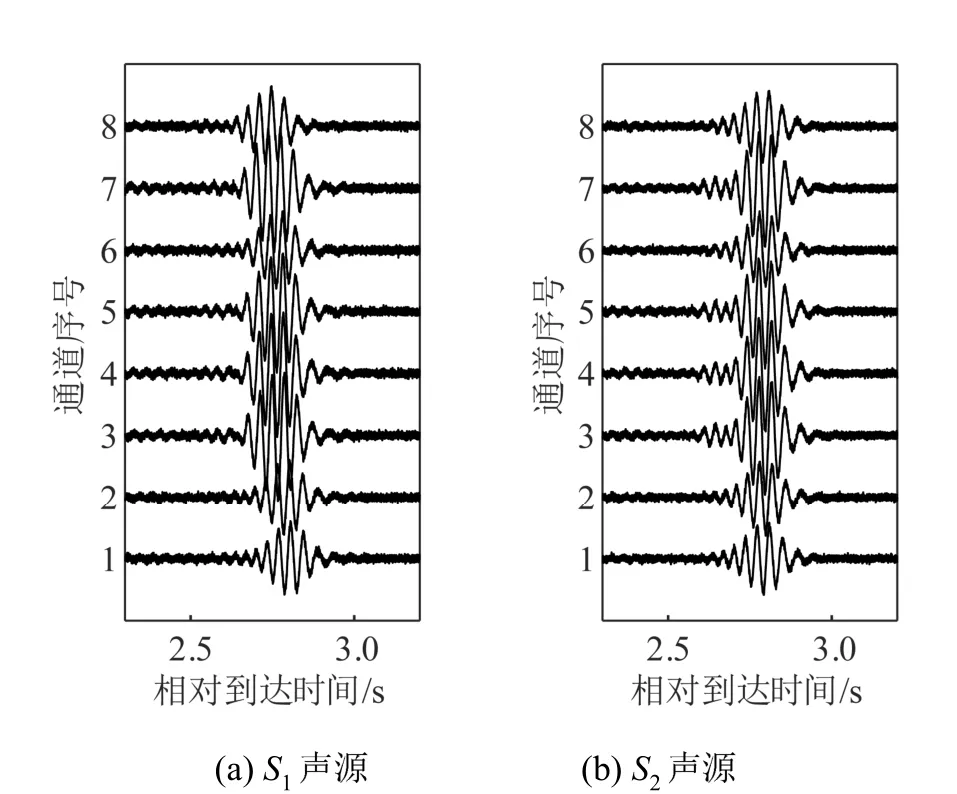
圖8 加10 dB 噪聲后陣列接收的來自兩個聲源的信號波形 Fig.8 Signal waveforms received by the array from two sources after adding 10 dB noise
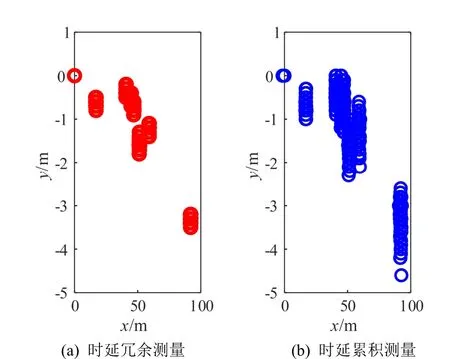
圖9 加10 dB 噪聲后的陣形校準(zhǔn)結(jié)果 Fig.9 Array shape calibration results obtained by using the two methods to estimate the time delay of array received signals after adding 10 dB noise
4 結(jié)論
本文提出了一種基于時延冗余測量的陣形校準(zhǔn)方法。數(shù)值仿真結(jié)果顯示,在信噪比偏低時,相較相鄰陣元時延累積的陣形校準(zhǔn)方法,所提的基于時延冗余測量的陣形校準(zhǔn)方法,更充分地利用了陣元的空間信息,可以提高陣形校準(zhǔn)精度與穩(wěn)定性。通過2020 年某近海實驗的數(shù)據(jù)分析,對所提基于時延冗余測量的陣形校準(zhǔn)方法進行了驗證,用校準(zhǔn)后的陣形進行波束掃描得到的聲源方位角與實際值更接近,表明了所提方法可以更準(zhǔn)確地給出各陣元相對參考陣元的位置,驗證了該方法的有效性。
致謝:感謝參加實驗的全體工作人員,他們的辛苦工作為本文提供了寶貴的實驗數(shù)據(jù)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55