飛機起落架系統擺振動力學研究進展
2022-08-01 07:28:38劉小川劉沖沖牟讓科
航空學報 2022年6期
劉小川,劉沖沖,牟讓科
1. 中國飛機強度研究所,西安 710065 2. 結構沖擊動力學航空科技重點實驗室,西安 710065 3. 陜西省飛行器振動沖擊與噪聲重點實驗室,西安 710065
摘 要:擺振是起落架支柱側向運動與圍繞支柱的扭轉運動相互耦合產生的自激振動,對飛機地面滑行的操縱性與安全性等具有很大的危害,是起落架系統設計中重點關注的動力學問題之一。擺振主要有“輪胎型”和“結構型”2類,可以采用動力學理論建模、多體動力學數值分析與全尺寸物理試驗等方法對起落架系統的擺振特性進行研究,已發展了線性與非線性理論建模方法和數值工具,建立起了起落架擺振試驗系統,也開展了全機瞬態激勵下的滑跑穩定性試驗。為防止擺振問題的產生,在認識擺振機理的基礎上,研究者廣泛而又深入地研究了起落架設計參數、輪胎參數、機體特性等對滑跑動響應與穩定性的影響,在獲得各種設計參數對起落架擺振穩定性影響的基礎上,發展了擺振動力學優化設計方法和智能器件與半主動/主動控制的擺振抑制方法,并開展了試驗驗證或裝機演示驗證。結合未來飛機平臺的發展和起落架技術的創新,對起落架擺振動力學問題的未來發展方向進行了展望。
飛機滑跑過程中,起落架遭遇外界擾動(不平整跑道、碎石等)作用,機輪將產生一定的偏角,當擾動消失后,如果機輪繼續保持周期的或發散的振動,則說明起落架穩定性不足,航空工程中將這類問題稱為擺振。擺振是起落架支柱側向運動與圍繞支柱的扭轉運動相互耦合產生的自激振動,是飛機地面運動過程中的常見現象和起落架系統的突出動力學問題。
擺振對飛機地面滑行的操縱性與安全性等均具有很大的危害,擺振發生時,起初表現為起落架系統的振動,隨著振幅的增大,最終將引起機身的劇烈抖動,輕者使飛行員感覺不適,儀表指針振動,影響其正常操縱,重者可導致機身部件、起落架結構的破壞,嚴重時可能導致飛機失控沖出跑道等災難性后果。
飛機機體、起落架系統和機場道面等組成一個復雜的動力學系統,擺振這一不穩定自激振動的能量反饋機制復雜,涉及到間隙、摩擦、阻尼等非線性現象。從擺振現象出發,擺振問題可分為“輪胎型”和“結構型”2類,一般采用動力學理論建模、多體動力學數值分析與全尺寸物理試驗等方法對擺振特性進行研究,已發展了線性與非線性理論建模方法與數值工具,通過起落架擺振試驗和全機瞬態激勵下的滑跑試驗,對建立的分析模型和分析方法進行驗證。
在深入認識擺振動力學機理的基礎上,國內外學者也開展了大量的擺振主、被動控制方法研究,其中采用減擺器是工程中常用的擺振抑制方法,通過合理設計減擺器參數,獲得滿足擺振抑制要求的動態阻尼,滿足起落架在使用速度與載荷范圍內的穩定性要求。隨著智能材料和控制方法的發展,擺振主動與半主動控制獲得了大量關注,特別是基于磁流變液的智能減擺器,因其響應速度快、控制品質好、具有一定被動阻尼效應等優勢,其工程樣機已通過了起落架擺振試驗驗證。
本文總結了起落架擺振動力學近年來的研究進展,重點關注了擺振動力學建模技術與起落架防擺設計方法的最新成果,并結合起落架技術和未來飛行器平臺創新發展的趨勢,總結了起落架擺振動力學應重點關注的問題。
1 擺振典型案例及相關標準規范
近年來國外軍民用飛機起落架擺振事故成上升趨勢,典型案例見表1,這些事故有些影響了飛機正常操縱,有些導致事故征候或直接造成飛機結構失效。中國的殲6、殲8、運11、運12等飛機也長期受擺振問題的困擾。
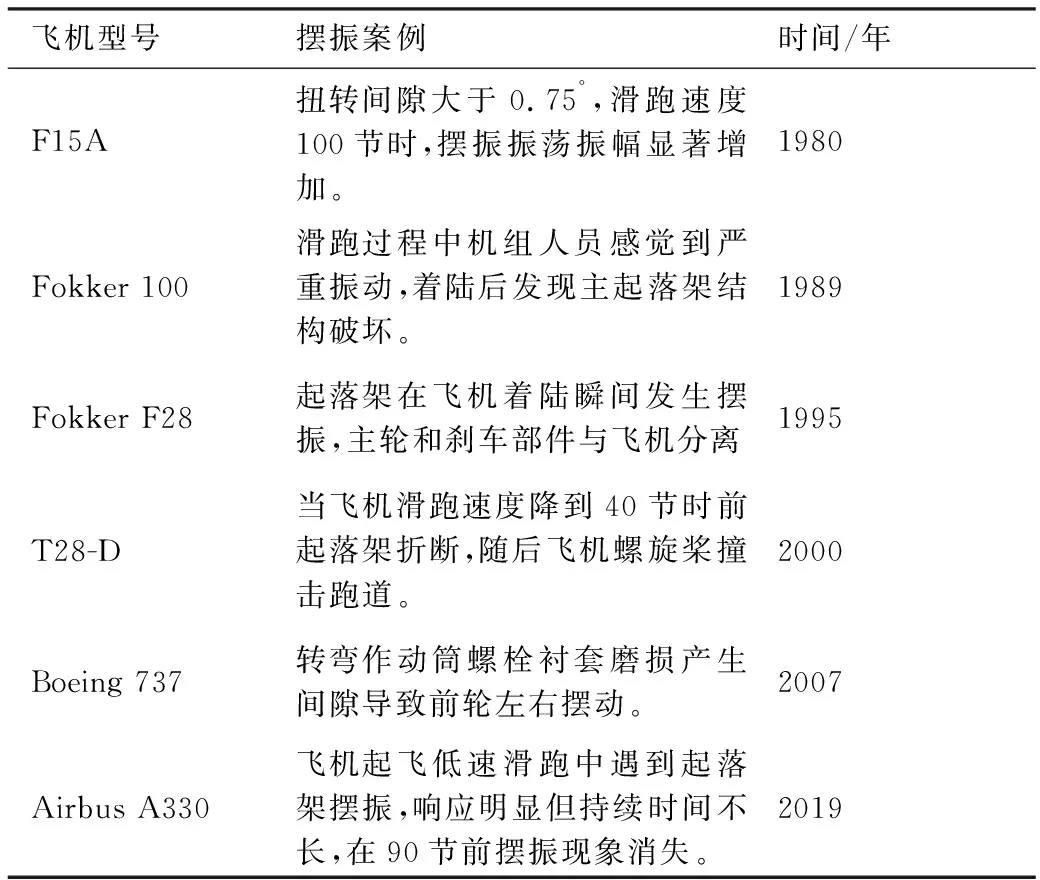
表1 典型擺振案例Table 1 Typical shimmy cases
正因為起落架擺振問題的多發性和危害性,國內外飛機研制規范對擺振均做了詳細的規定,如表2所示,并要求采取可靠的分析方法或試驗方法對起落架的擺振穩定性進行評定。
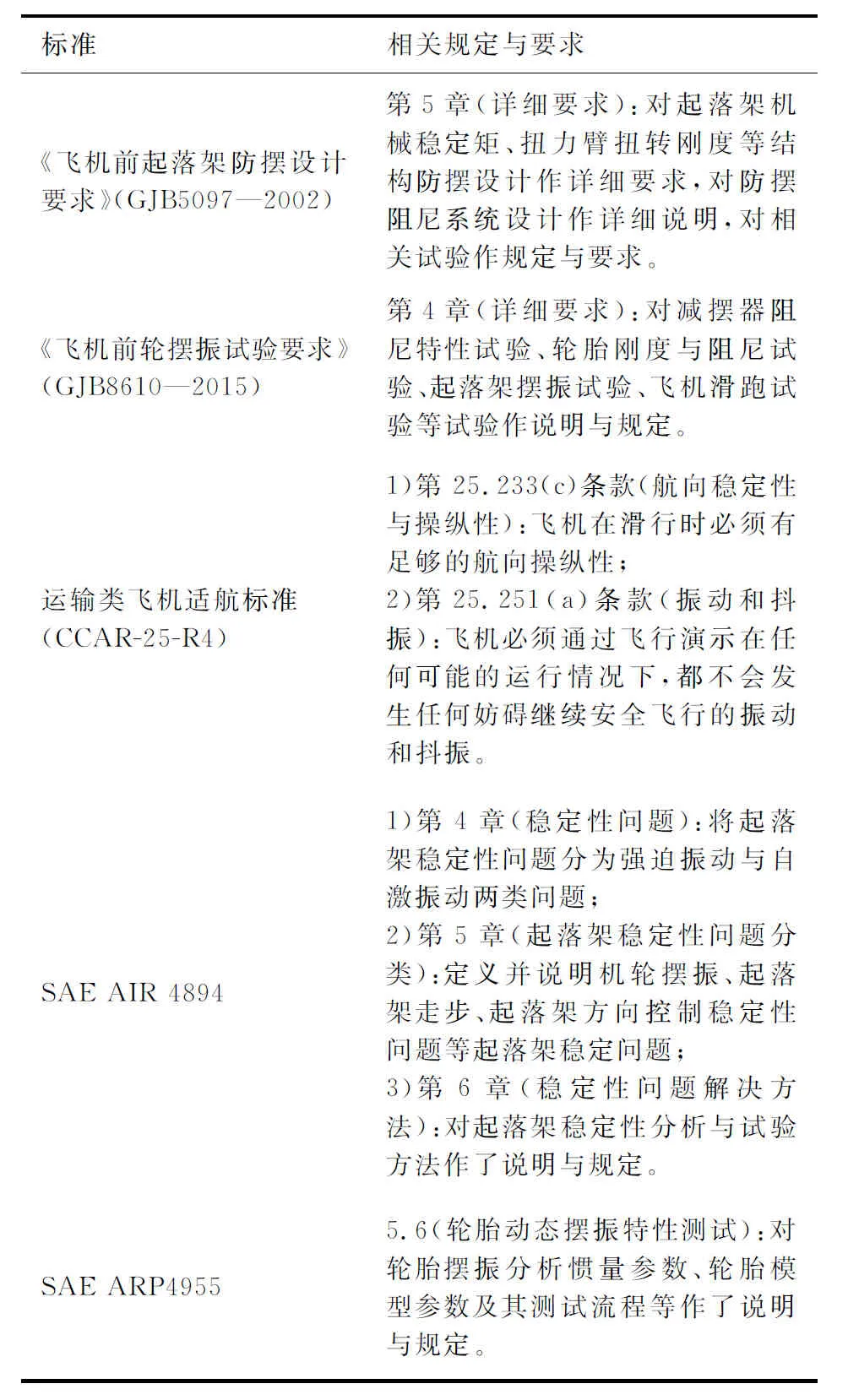
表2 起落架擺振相關標準規范Table 2 Standards of landing gear shimmy
2 起落架擺振的類型和機理
起落架由上支柱、下支柱、扭力臂、機輪組件等組成,上支柱與機身連接,上支柱與下支柱沿軸向的相對運動壓縮緩沖器,吸收地面輸入至飛機的沖擊能量,機輪組件與下支柱固連,可圍繞上支柱軸線旋轉運動,實現飛機地面滑跑過程的操縱轉向,如圖1所示,圖中是起落架滑跑航向速度;是機輪偏角;是起落架穩定矩。
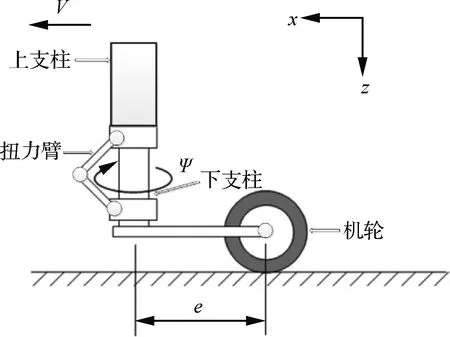
圖1 起落架運動關系原理圖Fig.1 Motion relationship of landing gear
飛機地面滑跑過程中,地面的支持力是輪胎及支柱變形等起落架運動參數的函數。起落架擺振是起落架支柱側向振動與機輪圍繞支柱軸線扭轉振動的耦合振動,與地面不平度、輪胎參數、起落架結構剛度、機體結構剛度等密切相關。一般用機輪繞起落架支柱中心線的偏擺幅度和響應頻率來描述起落架擺振特性,據統計,飛機起落架擺振頻率范圍大約在5~30 Hz左右,而擺振幅度一般都在20°以內。典型起落架擺振機輪偏擺角、角速度dΨd響應曲線見圖2。

圖2 典型起落架擺振機輪響應曲線[21]Fig.2 Response curves of wheel yaw angle and angular velocity of typical landing gear shimmy[21]
Collins和Black從擺振機理出發將起落架擺振分為“輪胎型”擺振與“結構型”擺振。當減擺器阻尼較小時,起落架在滑跑過程種可能產生一種涉及剛體扭轉運動的擺振,即是“輪胎型”擺振,如圖3所示,引起“輪胎型”擺振的主要原因是減擺器阻尼及輪胎剛度較小。當減擺器阻尼過大時,輪胎偏航振動變得非常穩定,而起落架支柱的結構振動模式可能變得不穩定,這時機輪擺動角主要由起落架支柱或減擺器傳動系統彈性變形提供。這種類型的擺振稱為“結構型”擺振。
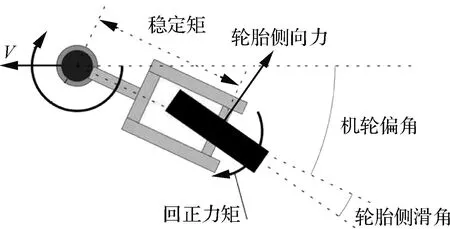
圖3 “輪胎型”擺振Fig.3 Tire-yaw shimmy
周進雄和諸德培認為影響“結構型”擺振的主要輪胎特性參數是輪胎側向剛度。增大輪胎側向剛度不利于結構型擺振的防擺;影響“結構型”擺振的關鍵參數是減擺器傳動系統扭轉剛度。增大起落架扭轉剛度,可顯著提高“結構型”擺振的穩定性。發生“結構型”擺振的主要原因是支柱扭轉剛度或減擺器傳動系統扭轉剛度較低或者是兩者剛度不匹配。另外,起落架系統存在結構間隙同樣會導致擺振,稱為“間隙型”擺振。
向錦武和楊冬梅通過靈敏度分析方法,區別研究了“輪胎型”擺振和“結構型”擺振。首先計算穩定矩、支柱側傾剛度和減擺傳動系統扭轉剛度等結構參數的改變對減擺器阻尼的影響,以獲得速度-靈敏度曲線,然后利用速度-靈敏度曲線分析阻尼特性對擺振穩定區域的影響,靈敏度計算考慮了各參數之間的耦合效應。
3 起落架擺振動力學研究方法
擺振動力學研究方法主要包括線性/非線性擺振動力學理論建模、多體動力學數值仿真、多層級擺振動力學試驗等。
3.1 擺振動力學理論建模
3.1.1 線性擺振動力學建模
起落架擺振動力學是典型的運動穩定性問題,根據李雅普諾夫經典理論,在小擾動下,由線性化假定得到的關于穩定性的結論,可以適用于真實的非線性系統,但應考慮足夠的裕度。
輪胎是起落架與地面交互的唯一介質,輪胎力學模型和參數對擺振分析結果的準確性有著直接影響,輪胎動力學模型主要有“弦”模型和點接觸模型。輪胎“弦”(張線)理論模型原理見圖4,是輪胎回正力矩;是輪胎側向力;是輪胎接觸半長;是輪胎側向變形;是輪胎松弛長度輪胎動特性隨運動狀態改變,且變化很大,輪胎動力學試驗是獲得模型參數的主要手段。輪胎剛度隨輪胎的滾動狀態、滑跑速度、振動頻率變化,通過對比不滾動輪胎動力學特性與滾動輪胎動力學特性,兩者力學特性相差很大,其中滾動輪胎扭轉剛度不到不滾動輪胎扭轉剛度的1/3。
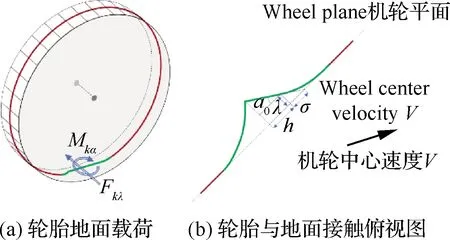
圖4 輪胎張線理論模型[37]Fig.4 Stretched string tire model[37]
在20世紀90年代前,已形成了較為系統的擺振問題限定動力學建模理論,以Von Schlippe和Dietrich、Moreland、Collins和Black、Smiley和Pacejka等為代表,輪胎的動力學建模方法的不同是這些方法的主要差別。《飛機前起落架防擺設計要求》要求在建立擺振運動和動力學聯立微分方程時,應包括起落架側向旋轉、起落架操縱扭轉、機輪扭轉、雙輪耦合、轉向操縱阻尼、機輪運動學方程、輪胎扭轉變形、輪胎側向變形等8個特征方程,其中包括2個獨立變量以及機輪扭角、輪胎側向傾角、機輪相對于飛機前進方向的轉向操縱角、轉彎操縱減擺器的轉彎操縱角、輪跡相對于機輪方向的角位移、輪跡中心的側向位移等6個自由度。
顧宏斌等采用液壓減擺器的流體力學模型代替擺振分析中常用的線性或二次阻尼系數,模型中考慮了油液壓縮性的影響采用變化的油液體積彈性模量。Sura和Suryanarayan在考慮擺振速度和擺振頻率的情況下,建立了一個三自由度前輪起落架擺振模型,得到了擺振速度和擺振頻率的解析表達式,前輪起落架在地面上的最低模態頻率近似于擺振頻率。Li等建立了包含擺振抑制裝置的福克100飛機主起落架的擺振模型,對擺振抑制裝置的參數進行了優化設計,應用2種激勵方法進行了擺振試驗驗證,振動峰值降低了16.7%。
劉勝利和劉沖沖等分別建立了考慮起落架與機體連接局部剛度影響的起落架擺振分析模型,輪胎模型分別采用Smiley模型與Moreland模型,采用復特征值優化法對擺振穩定性進行了計算分析,研究表明起落架與機體局部連接剛度對起落架擺振穩定性影響比較明顯,局部剛度偏弱可能導致起落架發生擺振。寇明龍等對飛機前起落架在轉彎控制狀態下進行了擺振分析,應用耗能等效原理建立了主動力和等效黏性阻尼力間的關系,建立并求解以輪胎變形為主的擺振方程組,并根據動態響應的收斂速度確定了防擺所需的主動力及轉彎作動器的有效活塞面積。
陳熠等建立了考慮機體動力特性的起落架擺振動力學方程組,研究了機體結構彈性、輪胎剛度對起落架擺振特性的影響規律,發現起落架擺振臨界速度、最大臨界阻尼值及擺振頻率隨著輪胎扭轉及側向剛度的增大而增大,而機體彈性使飛機起落架的擺振頻率更低,且擺振穩定區變小,更易發生擺振現象。考慮機體彈性飛機擺振響應與剛性飛機擺振響應對比見圖5。
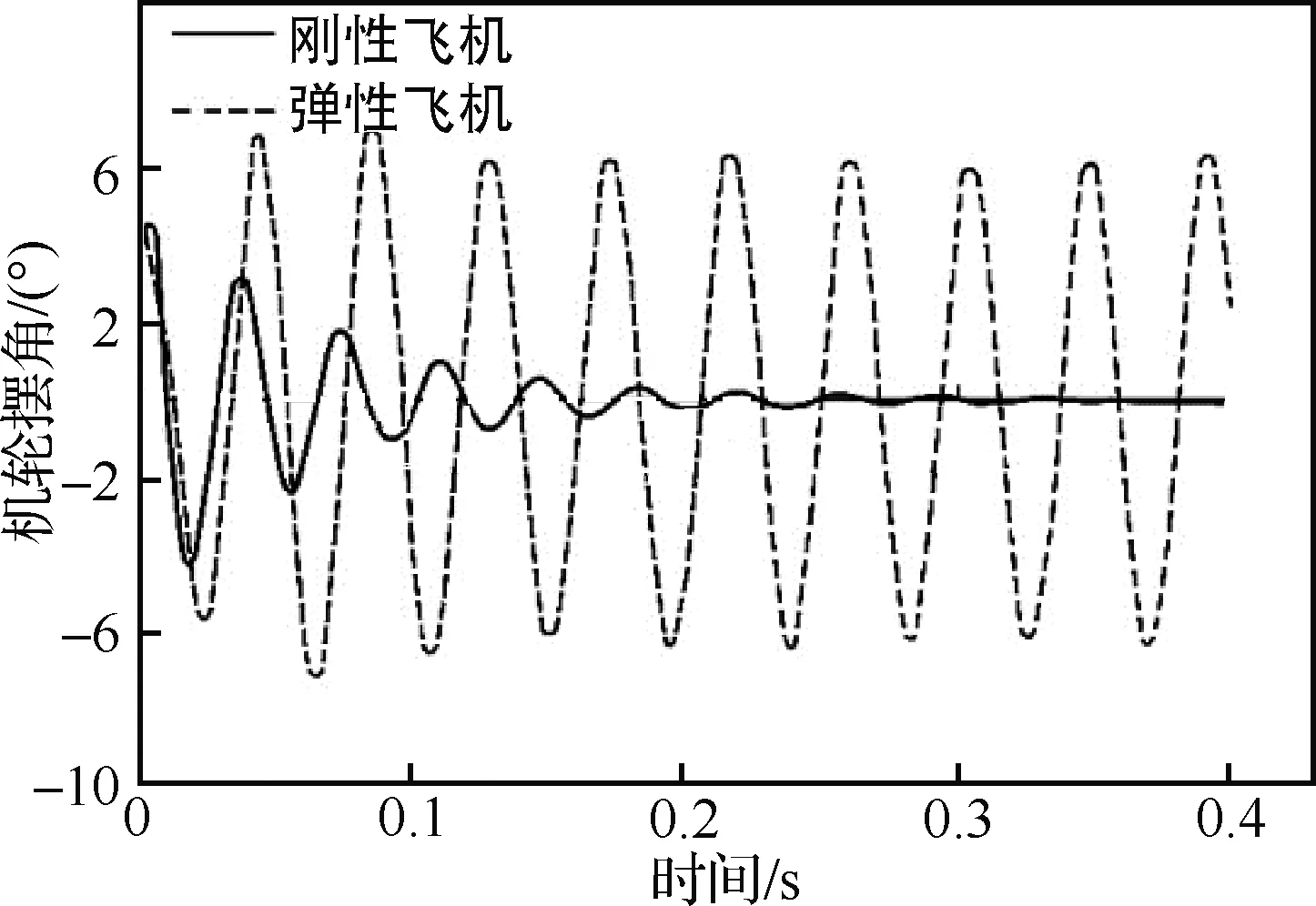
圖5 考慮機體彈性飛機擺振響應[53]Fig.5 Shimmy response of aircraft shimmy considering fuselage elasticity[53]
周進雄和諸德培研究了起落架穩定距、支柱剛度和減擺器傳動系統扭轉剛度對擺振的影響,獲得了各參數之間的耦合作用。擺振一般發生于飛機前起落架,主起落架動力學設計如果不關注振動匹配問題,同樣可能發生擺振現象。Chuban提出了一種基于支柱自由振動頻率和振型的主起落架擺振分析方法,考慮了結構的彈性效應,并以典型輕型飛機主起落架擺振分析為例給出了分析過程。
3.1.2 非線性擺振動力學建模

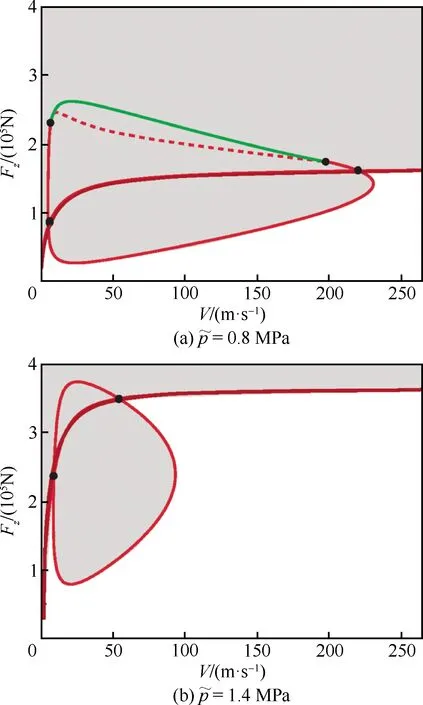
圖6 不同輪胎充氣壓力下起落架雙參數分叉圖[65]Fig.6 Two parameter bifurcation diagram of landing gear under different tire inflation pressures[65]
Rahmani和Behdinan提出了一種基于非線性擺振振幅圖和穩定性邊界圖的擺振阻尼器性能評估的有效方法,研究了扭矩連桿阻尼器參數和扭轉間隙與對擺振的影響,獲得了三維擺振圖和二維穩定性邊界,表明自由間隙會導致低振幅扭轉振蕩和零穩態側向振動。Ran等采用能量流法對魔術公式和非恒定松弛長度的輪胎模型進行比較,結果表明非線性輪胎模型不會改變平衡的穩定性,但對振動的幅值有明顯影響,為了在大振幅下獲得更準確的結果,擺振分析中應包括非恒定松弛長度,如圖7所示。Yin等等采用分岔分析方法研究了高速無人機在地面轉向過程中方向穩定性,建立了考慮大角度轉向運動對交互氣動力影響的無人機非線性地面滑行動力學模型,進行了單參數分岔分析,給出了系統的失穩機理,還通過雙參數分岔分析研究了主輪距和前輪轉向角的影響。
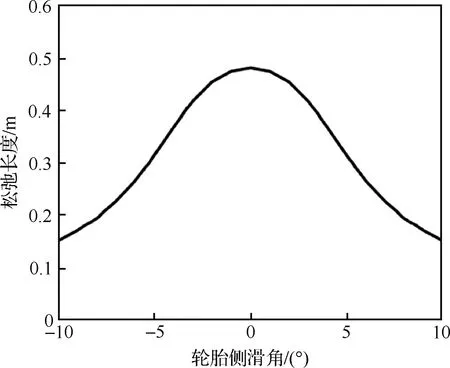
圖7 變松弛長度模型[61]Fig.7 Variable relaxation length model[61]
王學軍和喬新給出了用以描述五自由度的前輪擺振運動的非線性微分方程組,使用描述函數法研究了扭轉間隙、庫侖摩擦以及速度平方阻尼3個非線性項對前輪擺振穩定區城的影響。結果表明,非線性項對前輪擺振穩定區域有著重要的影響,由于扭轉間隙的存在,使得飛機臨界滑跑速度大大降低。陳大偉等根據分岔理論,應用數值延拓算法求解參數化非線性擺振微分方程,得到擺振的 Hopf 分岔點(臨界擺振速度)和擺振極限環的幅值,通過李雅普諾夫指數確定極限環的穩定性。
馮飛等建立了雙輪共轉起落架的擺振非線性動力學模型,并采用分岔計算方法對模型進行了穩定性求解,形成了一套適用于擺振分析的分岔計算方法,對輪間距和雙輪共轉對擺振穩定性的影響進行了分析,表明輪間距的增加能有效減小側向擺振的發生區域,對扭轉擺振區域則相反,且可能引起擺振區域拓撲結構的改變,雙輪共轉僅在輪間距較大的情況下,對側向擺振起到抑制作用。向宗威等總結了國內外現有起落架擺振間隙分析模型,總結了含間隙擺振模型求解方法,說明了不同方法的適用性并,指出其中的局限性及今后建模方向。Cheng等研究了飛機前起落架模型的Hopf-Hopf分岔問題,結果表明,由于高階項的影響,原始系統的分岔曲線與其截斷振幅系統的分岔曲線之間存在偏差,在分岔曲線上可以檢測到共振點,當在共振點附近選擇垂直力和滑行速度時,會導致輪胎在扭轉和側向方向上產生地面振動。
3.2 多體動力學數值仿真
隨著多體動力學仿真方法的發展,剛柔耦合數值分析在起落架動力學仿真中得到了廣泛的應用。典型飛機前起落架各構件運動關系見圖8。Besselink使用非線性有限元軟件MECANO研究了雙輪主起落架的擺振穩定性,構建了考慮非線性因素間隙、庫倫摩擦和速度平方阻尼的仿真模型,并通過全尺寸試驗驗證了分析結果的可靠性。

圖8 前起落架各構件運動關系Fig.8 Motion relationship of components of nose landing gear
馮飛等通過采用子結構模態綜合法將關鍵部件柔性化,建立了計及前起落架和機身彈性的全機地面滑跑剛柔耦合動力學模型,機身柔性使得飛機中高速情況下所需防擺阻尼平均增加了12.1%。馮飛等根據試驗數據對某型飛機進行了地面滑跑虛擬仿真,建立了考慮機身柔性、轉向間隙和輪胎參數等非線性因素的剛柔耦合模型,見圖9,給出了由滑行速度和臨界抗擺振阻尼系數構成的穩定區圖。結果表明,輪胎回中力矩系數、松弛長度和前起落架轉向間隙對臨界阻尼系數有顯著影響。楊禮芳在獲得輪胎靜剛度參數的基礎上,考慮到航空輪胎材料非線性、幾何非線性、接觸非線性等問題,建立了直升機尾起落架全柔性虛擬樣機,進行了擺振穩定性分析。
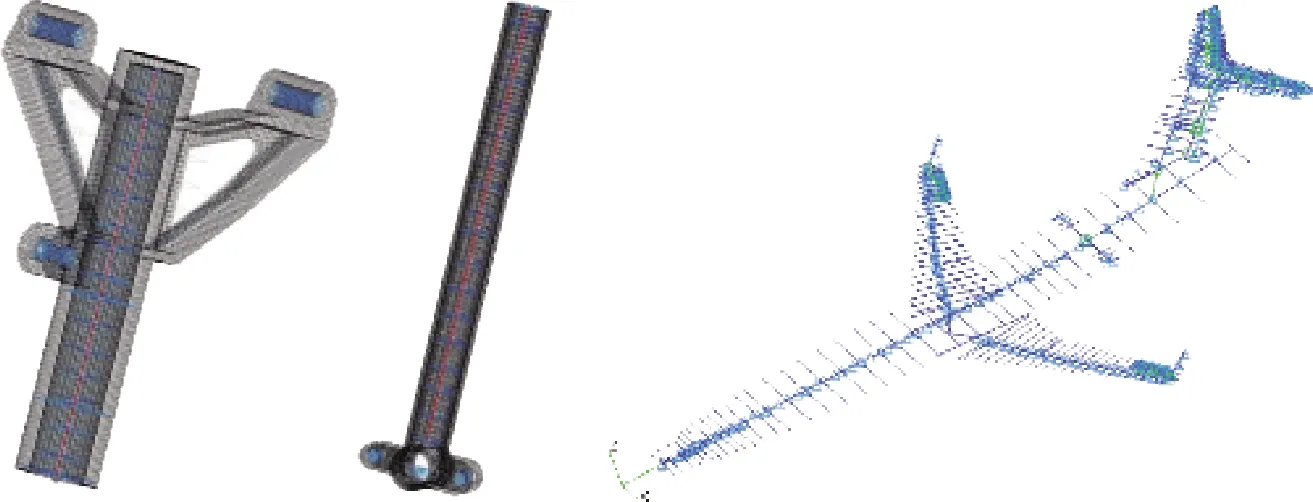
圖9 起落架與飛機柔性模型[74]Fig.9 Landing gear and aircraft flexible model[74]
Tartaruga等進行了多體動力學分析和自動分岔分析,考慮了幾種起落架和輪胎模型,建立了極限環振蕩(擺振)與系統參數變化的關系。德國航空航天中心使用SIMPACK建立了考慮剎車控制系統柔性起落架模型,引入計及側向動力學效應的輪胎模型,研究了起落架系統的滑行振動問題,評估了剎車走步和擺振等不穩定問題。Beckers等建立了柔性多體起落架模型,研究了擺振Hopf分叉,得到了飛機速度和垂直載荷的分岔圖,并開展了擺振阻尼、穩定矩和扭轉剛度的擺振敏度分析。Tartaruga等基于奇異值分解的方法,預測了典型飛機前起落架結構的擺振特性,表明分岔方法能夠非常準確地預測穩定性邊界,并通過敏度分析確定了關鍵結構參數,量化了不確定性對分岔特性的影響。
Rahmani和Behdinan通過多體動力學仿真,考慮起落架扭轉、側向、航向和軸向自由度以及輪胎、緩沖器和庫侖摩擦非線性的影響,研究了前起落架穩定性與關鍵系統參數的關系,發現庫侖摩擦是決定擺振起始和類型的關鍵因素,并使用非線性靈敏度分析研究了摩擦參數的影響,給出了防擺設計建議。何緒飛等針對民用前起落架系統,建立三維動力學仿真模型,模擬了不同的滑行速度、重量/重心和跑道障礙物,開展剛柔耦合起落架結構的擺振特性分析,評估了起落架減擺阻尼、輪胎松弛長度與側偏剛度對擺振穩定特性的影響。
3.3 擺振試驗
3.3.1 起落架擺振臺架試驗
起落架擺振動力學試驗是驗證擺振動力學建模分析方法正確性和起落架擺振設計符合性的可靠手段。《飛機前輪擺振試驗要求》規定,起落架擺振試驗由減擺器阻尼特性試驗、輪胎剛度阻尼試驗、起落架系統擺振試驗與飛機滑跑驗證試驗等組成,見圖10。通過減擺器阻尼特性試驗獲得不同頻率和振幅下的減擺器阻尼,并發現減擺系統潛在問題,通過輪胎剛度阻尼試驗,獲得不同輪胎氣壓下的輪胎剛度及阻尼,為擺振分析提供基礎數據。

圖10 多層級擺振試驗驗證體系Fig.10 Verification system of multi-level shimmy test
起落架系統擺振臺架試驗一般在專用的擺振試驗臺上開展,擺振試驗臺一般由提升系統、加載框架、飛輪系統等組成,如圖11所示。通過飛輪模擬飛機滑跑速度,通過垂向加載模擬飛機重量,通過拉偏角等方式施加初始干擾,模擬驗證起落架在地面操縱(起飛和著陸滑行)中受到初始干擾激勵后引起的飛機動態響應是否存在不穩定問題。在臺架模擬試驗中,可以通過局部剛度模擬器與機體動特性模擬器模擬飛機局部剛度及機身動特性對起落架擺振性能的影響。
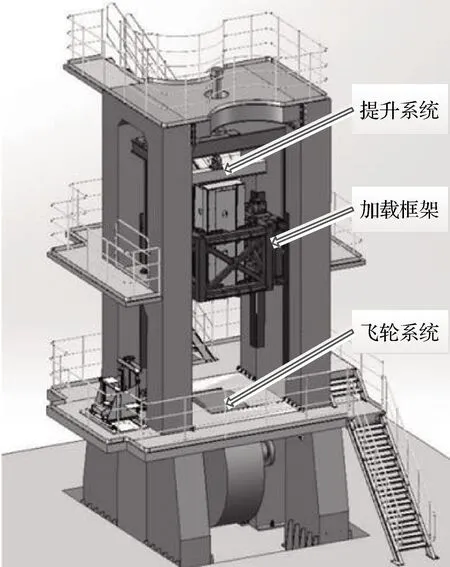
圖11 起落架擺振試驗臺Fig.11 Landing gear shimmy test bench
早在1956年,美國蘭利研究中心就建成了飛機起落架試驗設備,中國飛機強度研究所結構沖擊動力學航空科技重點實驗室也構建了滿足200 t級飛機起落架擺振試驗要求的擺振試驗臺。
Krabacher介紹了T-46前起落架擺振參數的測試方法。描述了相關試驗測試裝置,定義了要測試的參數,描述了數據處理技術,給出了最終計算值,并對起落架扭轉自由間隙的測試技術進行了討論。Black利用模擬跑道的飛輪和模擬機身的起落架安裝結構上的實驗室擺振測試,說明了實驗室測試和飛機滑行測試之間的差異,給出實驗室測試和飛機外場滑行對比結果。
Yager在蘭利中心的LLT(Landing Loads Track)設備上進行了前起落架擺振測試,試驗結果表面混凝土跑道和飛輪擺振試驗得到的試驗數據十分相似,潮濕跑道和沙土跑道的前起落架穩定性能與干跑道類似。
3.3.2 全機滑跑試驗
在飛機全機地面滑行試驗階段,分別進行全機低速、中速、高速及高速抬前輪地面滑行試驗,測試起落架及飛機關鍵部位載荷、位移、速度、加速度、壓力等動態響應,驗證飛機的滑行穩定性和起落架的擺振穩定性。
賈天嬌和湯阿妮開展了起落架地面滑跑試驗研究起落架擺振穩定性。通過在跑道上加裝激勵板,如圖12所示,有效激起起落架擺振相關模態;采用模態單峰隔離結合最小二乘算法,通過模態參數識別進行試驗數據分析。謝帥等建立了前起落架擺振多體動力學模型,進行擺振工況仿真,識別出工作模態,并從時域和頻域2個角度與飛行滑跑試驗結果反復對比,不斷修改更新模型,完成模型標定,仿真與試驗結果對比見圖13, 圖中:表示起落架關鍵部位加速度;為重力加速度。最后用模型擴展試驗包線,驗證了起落架在整個包線范圍內的穩定性。賈天嬌等還對激勵板扭轉、側向、縱向擾動的初始載荷進行了理論分析,包括尺度效應、延遲效應、形狀效應,研究了激勵板的安裝角、橫截面形狀和尺寸等主要設計參數的影響作用。通過帶有柔性體的起落架多體建模仿真方法,分析不同安裝角下前起落架扭轉、側向和前后方向的激勵效率,以及不同高度和寬度組合設計的激勵板激勵出的輪胎載荷及輪軸加速度響應。
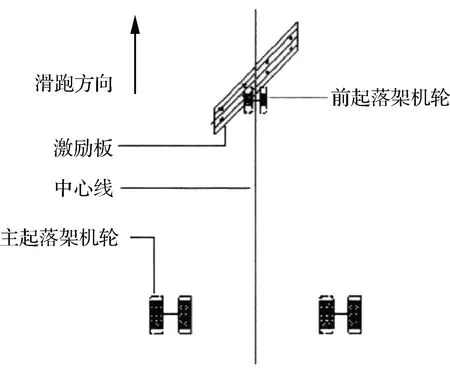
圖12 擺振飛行試驗激勵方法[87]Fig.12 Excitation method of shimmy flight test[87]

圖13 飛機地面滑行仿真與試驗結果[88]Fig.13 Simulation and test results of aircraft ground taxiing[88]
Grossman開展了F-15飛機地面滑行試驗,通過分析與試驗結合的方法研究了擺振對輪胎參數值、支柱摩擦系數以及支柱扭轉間隙變化的敏感性,評估了設計變更對前起落架擺振的影響。Sura和Suryanarayan分析起落架在地面橫向激勵的動力學響應,將跑道表面的空間變化轉化為功率譜密度的隨機地面激勵。
某輕型飛機的前起落架在地面滑行過程中觀察到了明顯的擺振現象,在某些情況下,擺振問題非常嚴重,成為飛機安全地面操作的障礙。通過實驗室擺振試驗復現了問題,確定了擺振發生的一些特定條件。通過改進轉向軸環,增加轉向黏性阻力特性,獲得了更大的阻尼和更穩定的摩擦特性,擺振問題最終得到解決。
4 起落架系統防擺振設計方法
工程實踐中,主要通過對起落架總體設計參數、減擺器阻尼參數等進行優化設計,以及對起落架振動進行主動/半主動控制等方法,避免起落架在使用條件下發生擺振問題。
4.1 起落架擺振動力學優化設計
常正等闡述了擺振產生的機理和防擺設計中需要重點考慮的因素,結合國內外飛機起落架擺振研究進展,從工程設計角度,提出了起落架擺振分析與驗證的思路方法與流程,認為采用減擺器仍是抑制擺振的重要手段,對于保持起落架的穩定性和安全性至關重要。
減擺器一般采用液壓式,連接在上支柱與下支柱之間,或在支柱結構上并入扭矩連桿,也可以安裝在扭力臂頂點連接處,見圖14。另外,還可采用摩擦式減擺器或者安裝慣性質量抑制起落架擺振。
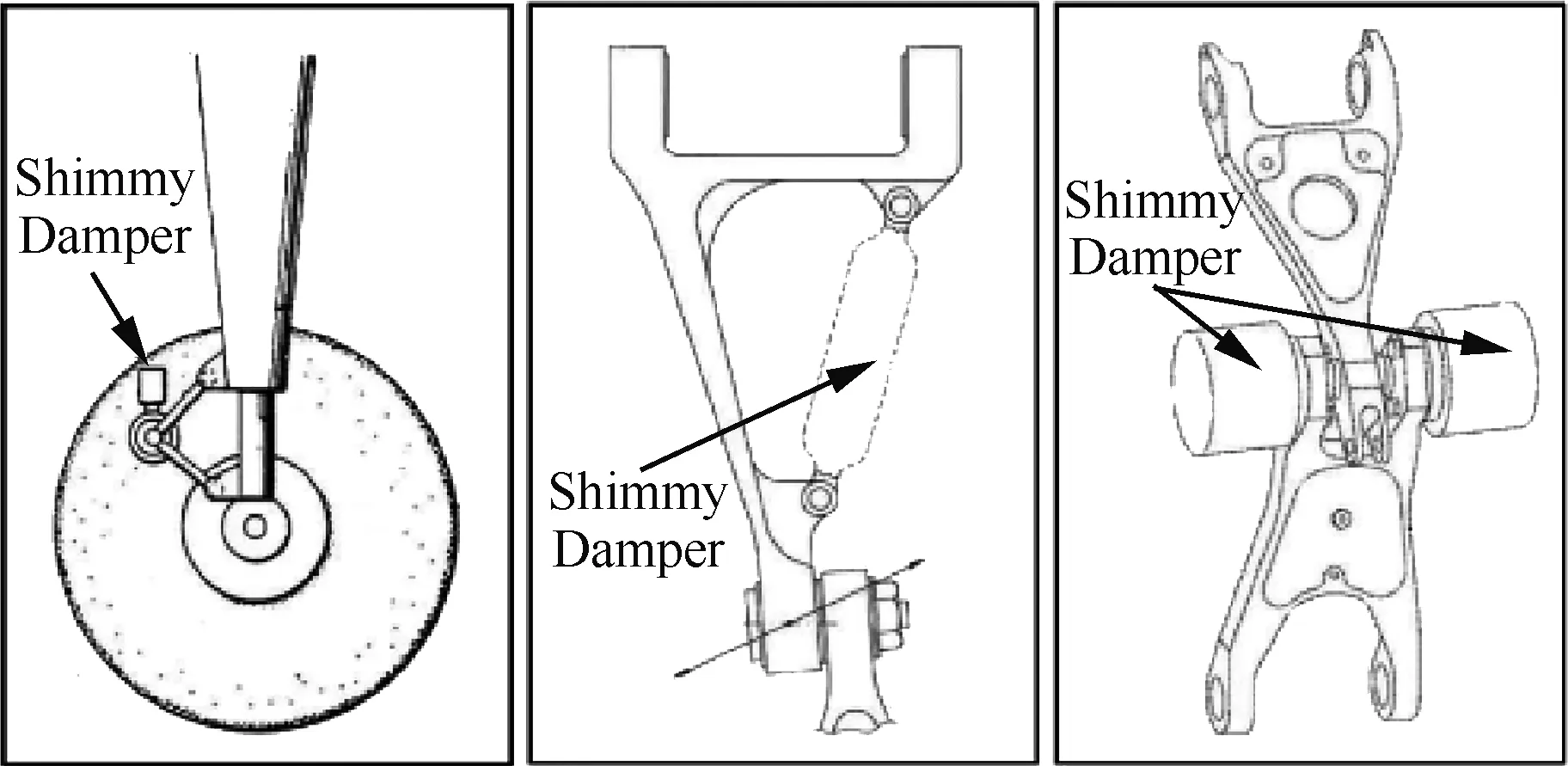
圖14 不同種類減擺器[66]Fig.14 Different kinds of shimmy dampers[66]
Rahmani和Behdinan介紹了一種新型前起落架擺振減振器的結構拓撲優化設計,見圖15,采用一種滿足強度要求的扭矩連桿機構抑制擺振,分析結果表明新型減擺機構可以有效降低擺振響應。
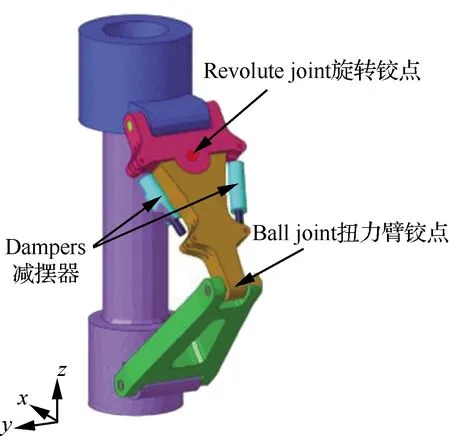
圖15 扭矩連桿機構減擺器[93]Fig.15 Torque linkage shimmy damper[93]
Liu等利用反向傳播(BP)神經網絡能,建立了以擺振阻尼孔徑、激勵頻率和激勵幅值為輸入,以擺振阻尼值為輸出的BP神經網絡結構軟測量模型,利用神經網絡對模型進行學習和預測,預測結果證明了方法的可行性和實用性。張海東等在輪胎和起落架結構基本確定的條件下,通過優化減擺器傳遞比和增加減擺器阻尼提高減擺器減擺能力,調節減擺器相關桿件的長度有效調節傳遞比,通過增加減擺器活塞面積和縮小阻尼孔油孔面積,增大減擺器阻尼,使改進的減擺器滿足新飛機的設計要求。
4.2 擺振的主動與半主動控制
歐盟第七研究框架資助研究了一種電動機驅動的減擺系統,并加入主動控制,通過試驗驗證減擺器的效能。目前國內外多款中小型飛機已應用電動操縱減擺系統。Tourajizadeh和Zare將滑模控制(SMC)與狀態相關方程(SDRE)相結合,設計了一種魯棒最優控制器,該控制器能有效抑制起落架擺振。為了驗證該控制器的最優性能和魯棒性,利用MATLAB軟件對系統的振動響應進行了仿真,并通過對比分析驗證了其性能和效率。
陳大偉和顧宏斌采用主動控制策略抑制擺振,建立相應數學模型,應用數值延拓算法求解加入控制后的非線性擺振微分方程。結果表明,適當選取控制參數,在飛機滑跑速度范圍內,應用主動控制策略可以達到完全抑制擺振的目的。列舉起落架擺振控制研究中采用的控制方法,給出各種控制算法的效果和局限性分析。
Gaétan Pouly提出了2種基于間接模糊自適應理論和直接模糊自適應理論的狀態反饋控制方案,并與經典的比例積分微分(PID)方案進行了比較。與PID控制器不同,針對不同測試場景的結果和魯棒性分析表明,所提出的控制器能夠有效地抑制擺振現象。Pouly等在歐洲DREAT項目的支持下,采用模糊自適應控制器進行起落架擺振主動控制。基于李雅普諾夫理論,證明了所提出的自適應控制方案保證了即使估計中出現近似誤差,跟蹤誤差也將漸近收斂到零。仿真結果表明,所提出的控制律產生了真實的控制輸入,能夠適當地抑制擺振,見圖16。

圖16 加入主動控制起落架偏擺角響應對比[99]Fig.16 Comparison of yaw angle response of landing gear with active control under random excitation[99]
除了通過飛機轉彎控制系統進行擺振主動控制,還可以通過智能材料實施半主動控制。祝世興等等開展了磁流變減擺器結構設計、磁路設計、控制方法研究、地面擺振試驗驗證等研究工作,一種磁流變減擺器內部結構見圖17。Atabay和Ozkol采用電流相關Bouc-Wen模型建模的磁流變(MR)阻尼器引入有間隙和無間隙的扭轉起落架擺振模型。采用遺傳算法對Bouc-Wen模型進行參數辨識,并在起落架減擺中應用。Dong等采用線性自抗擾控制技術(LADRC)對擺振進行控制,并與PID控制方法進行了比較。仿真結果表明,LADRC能很好地控制擺振。當飛行速度較高時,穩定時間和幅值均小于PID控制。
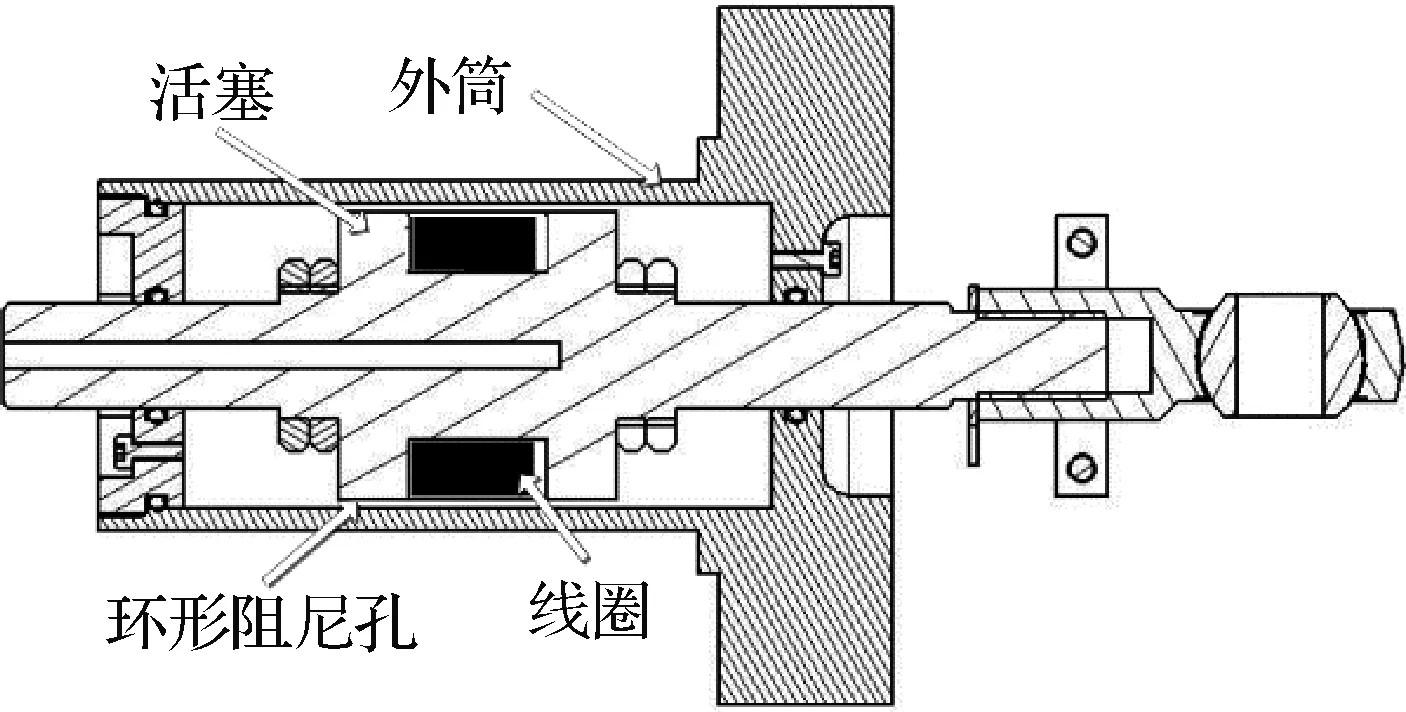
圖17 一種磁流變減擺器內部結構[104]Fig.17 Internal structure of a magnetorheologic shimmy damper[104]
Kang等基于神經網絡中的S型遲滯模型,提出了一種電流閉環和阻尼器活塞桿位移閉環的雙閉環控制系統,針對磁流變擺振阻尼器阻尼力輸出的強非線性,設計并制作了基于stm32控制器的小型控制電氣系統。采用深度神經網絡算法設計了多輸入單輸出的多層訓練學習模型。振動頻率24 Hz,振幅0.6 mm,不同電流作用下功量圖見圖18,圖中:是阻尼器作用力,是阻尼器振幅。結合擺振試驗數據,磁流變擺振阻尼器可以有效地降低起落架在不同工況下的振動,有效地抑制擺振。楊永剛等采用線性二次型(LQR)最優控制策略對由磁流變(MR)阻尼器構成的前起落架減擺器進行半主動控制,考慮其對機輪擺動角度、擺動角速度和側向位移的影響,對前起落架系統的振動響應和控制性能進行比較分析。仿真結果表明在飛機滑跑速度范圍內,半主動線性二次型最優控制作用于磁流變阻尼器中能有效地抑制前起落架擺振。
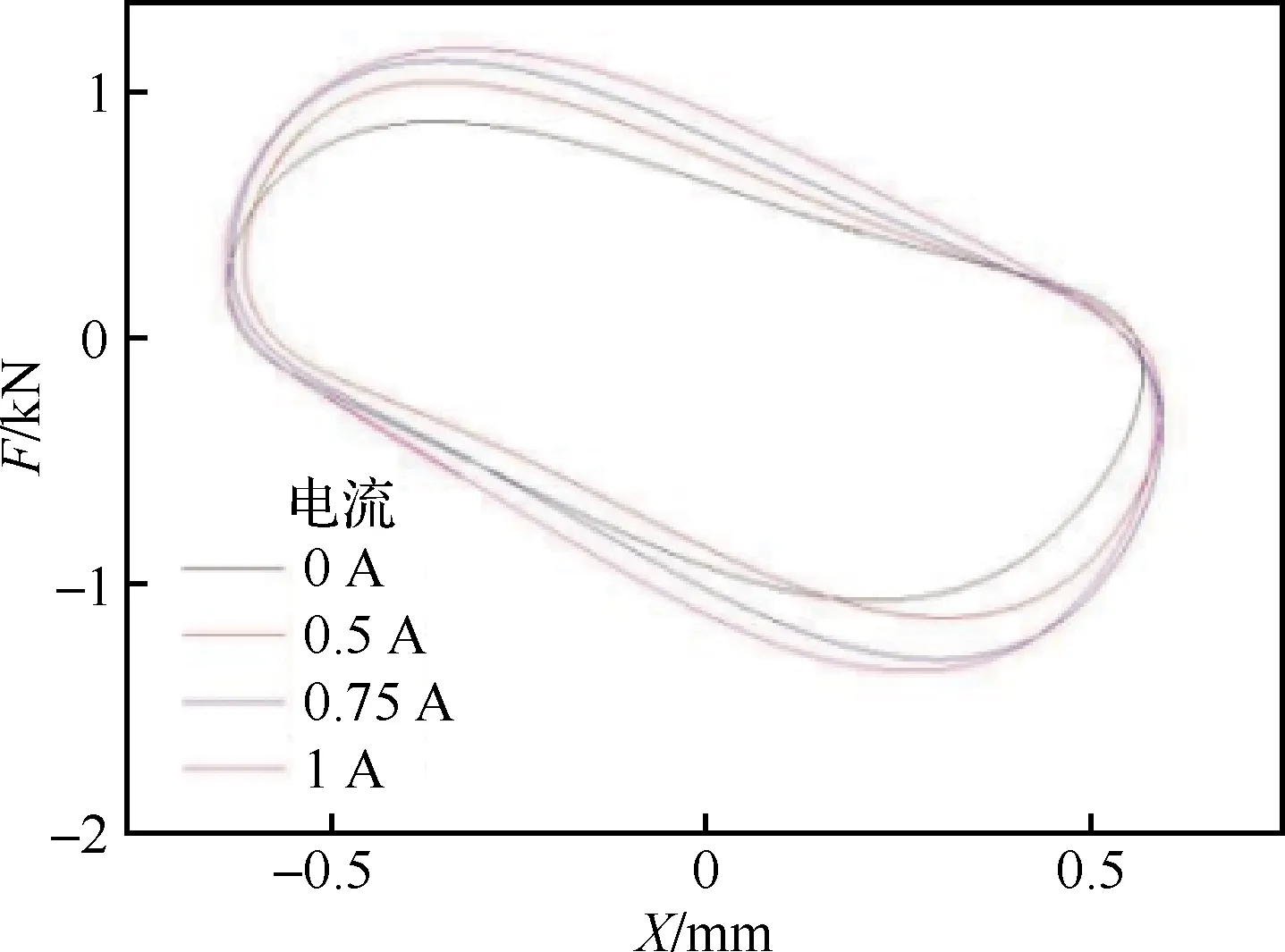
圖18 磁流變減擺器阻尼試驗結果[108]Fig.18 Damping test results of MR damper[108]
5 結 語
伴隨著飛機發展,起落架擺振問題已有百年的歷史,至今仍然是飛機使用過程中的多發性事故征候,軍用飛機研制規范和民機適航標準均對飛機的擺振穩定性作了明確規定。從機理出發,擺振問題可分為“輪胎型”和“結構型”2類。一般采用動力學理論建模、數值分析與物理試驗手段進行擺振穩定性研究,物理試驗方面已形成了涵蓋減擺器、輪胎、起落架系統與整機滑跑在內的多層級試驗體系。工程中多通過動力學優化方法優化起落架設計參數以在要求的速度-載荷包線內確保起落架的滑跑穩定性,或采用半主動/主動控制手段對擺振響應進行抑制。
起落架擺振是復雜的非線性動力學問題,飛機機體、起落架系統和機場道面等組成一個復雜的動力學系統,擺振這一不穩定自激振動的能量反饋機制復雜,涉及到間隙、摩擦、阻尼等非線性現象,需要對機體結構動特性、起落架設計參數、輪胎參數、道面參數等進行綜合匹配設計。隨著新能源飛機、高超聲速飛機等創新型飛行器的持續涌現,以及電動起落架、復合材料起落架等先進起落架技術的發展,在后續起落架系統擺振動力學研究中,以下幾個方面的問題還需要著重考慮:
1) 持續研究濕滑跑道、結冰跑道、晃動艦面、側風、非對稱推力等對擺振穩定性的影響,發展更高精度的輪胎模型,進一步完善擺振穩定性的非線性隨機動力學建模方法與求解方法。
2) 關注電驅動起落架、復合材料起落架、磁流變充填起落架等先進起落架的擺振穩定性問題。
3) 通過智能作動器件和半主動/主動控制方法,綜合考慮起落架滑跑穩定性與滑跑動響應問題,在保持穩定性的同時,降低傳遞至機體的動態載荷,并提高滑行舒適性。
4) 隨著數字技術的發展,探索數字孿生在起落架滑跑動力學領域的應用,構建起落架數字孿生模型,通過振動響應在線監測,開展數據驅動的擺振穩定性預測等研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
數學物理學報(2017年6期)2018-01-22 02:26:40
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19