涌浪條件下氣墊艇進塢方法和效能評估模型研究*
2022-08-02 02:16:30韋定江許明星李康旋魏霄冉
艦船電子工程 2022年6期
關鍵詞:模型
韋定江 吳 迪 許明星 李康旋 魏霄冉
(1.海軍大連艦艇學院學員二大隊 大連 116018)(2.海軍大連艦艇學院軍事海洋與測繪系 大連 116018)(3.中國人民解放軍92692部隊 湛江 542057)(4.國防科技大學學員五大隊 長沙 410073)
1 引言
隨著我國海軍戰略轉型,登陸艦需在陌生的大洋上完成任務。大洋的海浪主要以涌浪為主,波長較長,方向不一,傳播力量大,導致艦艇縱橫搖明顯加大,艦尾上下顛簸,艉跳板被抬高甚至躍出水面[1]。在該情況下,艇艏向變化較大,側滑嚴重,艦艇操縱困難,容易造成氣墊船圍裙擠壓破損,安全風險較大。現對大洋涌浪的特征進行研究,找到艦艇搖擺周期與涌浪的周期關系,采用理想化和多因素考慮的兩個模式,建立數學模型,找出兩者的線性關系,并基于此提出相應的應用解決方案。
2 大洋涌浪的特征
2.1 大洋總體涌浪特點
在大洋航行中,長周期涌浪容易使得艦船發生垂向上的運動,短周期涌浪則會使得艦船發生一定頻率的搖擺。涌浪是海面波浪的主要形式,常受風的制約。由于不同大洋海洋環境特征不同,涌浪分布特征存在差異。以太平洋和印度洋為例,太平洋受到西風帶的影響,風致浪的作用明顯,以東為主。南北太平洋的涌浪能量衰減快,難維持,熱帶附近的衰減較為緩慢,中國南海為混合浪,宮古海峽和巴士海峽附近波齡為夏季為2.5~3,冬季為1.0~2.5,波陡夏季為0.008,冬季為0.0012[2]。印度洋涌浪時空影響明顯,如北印度洋季風期間,涌浪在混合浪中占據主導,同時其和海面表層風速呈線性關系,南印度洋的涌浪不僅向東北堆積,且有向北方運動的趨勢。整個海域總體涌浪的波高與西風帶相關,以西風帶為起始點,向北減小,印度洋南部涌浪常向北部傳播。整體上看,印度洋海域的混合浪、涌浪波高都有逐年遞增的趨勢[3]。
2.2 局部海區涌浪對艦船影響特點
本小節以亞丁灣以東、菲律賓以東、澳大利亞以西三個海區為例,分析艦船在該海區的主要影響因素。涌浪上述三個海區都有各自的特點,總體上看,在任務海區遭受到的涌浪特點,并非單一或短周期涌浪所引起,結合Ventusky 氣溫圖(圖1、圖2)可得,各海區涌浪分布均較為密集,且有主體方向。
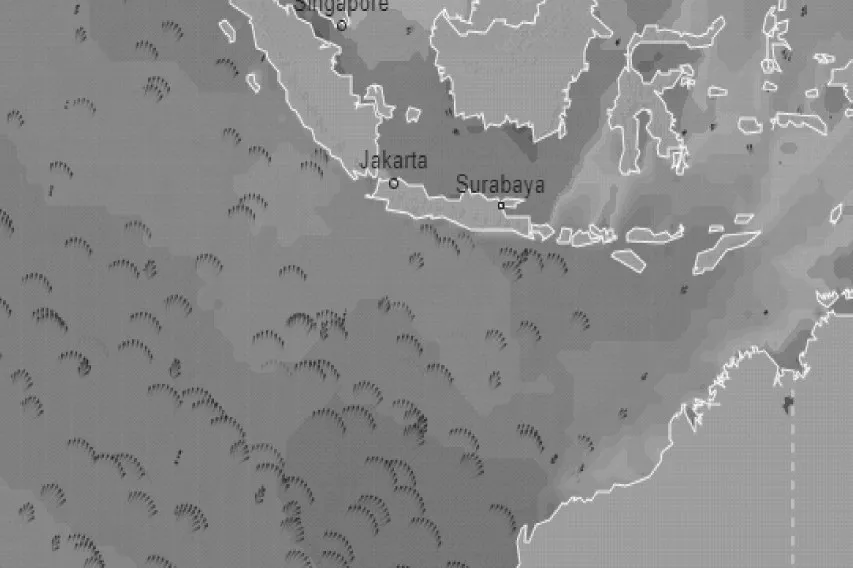
圖1 澳大利亞以西涌浪分布

圖2 亞丁灣附近涌浪分布
單一長周期涌浪的主體頻率約在8s~22s以內,并與風場的相關參數形成強相關的數學關系。在風區內,風速大,風時長的海面風引起的涌浪周期不小于8s,相鄰兩個周期內的時間間隔在40s 以內,難以滿足艦船任務需要。因此,艦船在大洋中研究涌浪特點時,需結合海面風區的時空特征,以涌浪波群的形式分布。根據艦船的耐波性和任務實際反饋,影響氣墊船進塢窗口期的涌浪波高為1m~4m,通過數據處理分析得出該波高下涌浪出現頻率隨月份的變化關系。
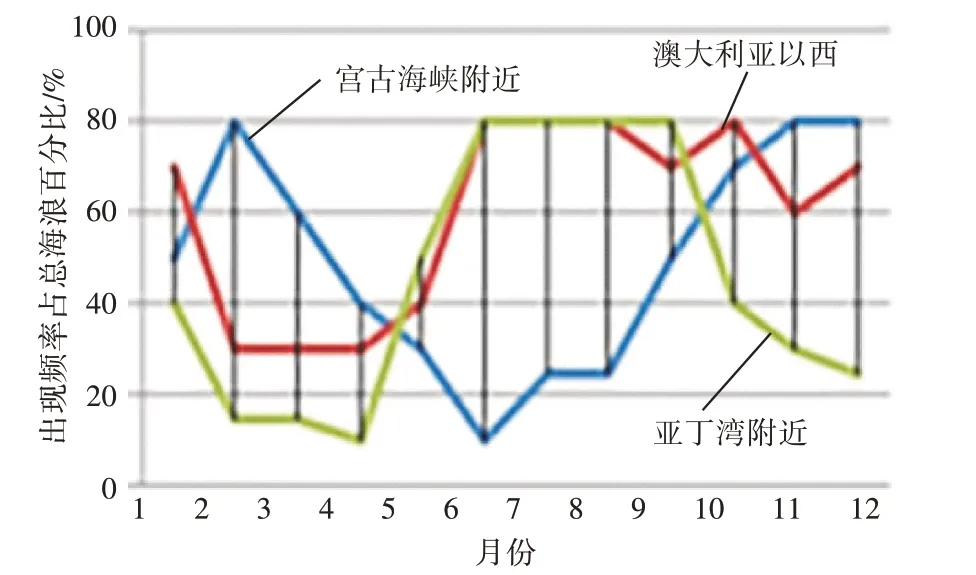
圖3 該波高下涌浪出現頻率隨月份的變化關系
由圖3 可得,9~10 月的出現頻率較高,4~5 月出現頻率較低,澳大利亞以西、印度尼西亞海域出現頻率由近岸向大洋呈階梯關系。綜上所述,我們可根據實際任務的時空需求,根據海區涌浪分布特點,得到合適的訓練任務時間。
2.3 海浪波群的特征
艦船在大洋上航行時主要受到以涌浪為主的海浪波群影響。涌浪可看成若干的小波,根據大洋特性,每個海區中的波陣面相位分布都有一定差異。波群是海區中,隨機波陣列的一組高波數,每段時間間隔內,高波總是成群出現,并且波高和周期滿足聯合分布函數。基于合田良實和俞律修等人的數據觀測和分析結果可得,海浪的波群和群高分布、組成波都有一定的影響,群性較大的波群的相位分布在Π附近取得最大值,群性大時的波高分布較寬。海浪波群特征與單個涌浪特征息息相關,單一涌浪在組成波群的過程中,隨著時間的推移將發生一定的衰減。波浪在離開風區后,由于受到湍流變形效應和在邊界層中其他因素的影響,將發生一定的能量衰減。艦船任務時主要考慮以長周期的涌浪為主、波高為1m~4m 的涌浪影響,該范圍內的涌浪單個周期在8s~22s不等,無法滿足氣墊船進塢的時間需要,但是同時,長周期波主要以大圓的形式進行傳播,從源區開始向外發生衰減,該區域內的涌浪逐步消亡并保持一定的群速關系。在研究氣墊船進塢窗口期時,需考慮多高波的波群衰減情況,得到合適的進塢時間。
3 艦船在波浪中的運動模型
艦船在波浪中,保持著一定的運動響應,受到航行態勢、涌浪遭遇角、任務時空和海區的制約,本節利用艦船在波浪上的運動模型,結合實際研究艦船在長周期涌浪下的運動狀態。
3.1 艦船在長周期涌浪中的運動方程
船舶在長周期涌浪干擾中的運動,可視為規則波中的微幅搖蕩運動,主要由三個線位移(縱蕩、垂蕩、橫蕩)和三個角位移(橫搖、縱搖、首搖)組成。但在氣墊船進塢過程中,受到的主要影響為縱搖,橫搖和垂蕩[4],其他影響在實際任務過程中均可忽略不計,基于此,將其簡化為三個自由度運動方程。現定義在該涌浪周期內,波浪與艦船的遭遇次數為遭遇頻率ω 如式(1)。 ω0為波浪圓頻率,β為浪向角,k0為波數:

同時,為方便計算研究,以穩定狀態下,船舶位移向量簡化后可作為遭遇頻率,ω為變化頻率簡譜量如式(2):

其中η1,η2,η3,代表橫搖、縱搖、垂蕩并由剛體運動定理得船舶在波浪中運動簡化方程,如式(3):

其中[M]為剛體質量矩陣,F(t)為外力列向量,η(t)為剛體位移列向量。在該線性理論分析中,需考慮兩部分的流體載荷F(t),一部分為源于船舶相對靜水平衡你位置的流體靜力載荷FS(t),另一部分為依賴于波浪與船舶運動的流體運力載荷FD(t)[5],如式(4):

綜上所述,可整理出艦船在長周期下的涌浪簡化運動方程:

[A]、[B]為流體動力系數,[C]為流體動力系數,{f(t)}為波浪干擾力,{f}為波浪干擾力的復數振幅。
3.2 艦船在非線性運動中的響應
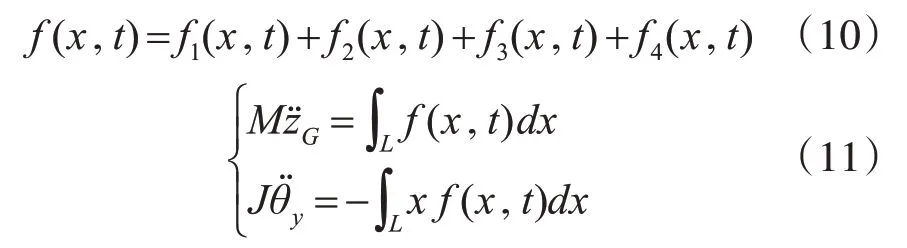
規則波條件下的艦船運動模型存在局限性。艦船以浪向角β =0°的頂浪航行過程中,艦船所受波浪載荷的影響產生的運動狀態為非線性[6]。基于擴展非線性切片理論,我們可對一定搖蕩運動幅度的艦船分析。氣墊船進塢時,母艦艉部主要影響因素源于鉛垂面,通過對母船艦艉垂向流體力的分析,可分析得出四個部分的微分運動方程如式(6~9)。

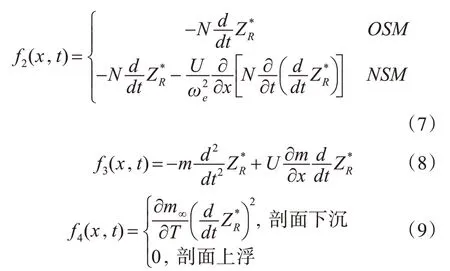
并結合四個部分運動方程[7],假設其時間步長為t,所受到力為靜水恢復力+波浪主干擾力,提出該部位整體垂向流體受力分析方程如式(10),以及鉛錘面上縱搖和垂蕩的運動方程如式(11)[8]:
通過對規則波和非線性運動下的情況研究,我們可得出艦船運動參數和在長周期、多方向涌浪中會產生的干擾因素,確定橫搖、縱搖、垂蕩方向的運動影響系數,為窗口期數學模型確定提供了艦船運動的系數參照。
4 預測氣墊艇進塢的窗口期的方法
氣墊艇進塢窗口期的選擇與確立需圍繞海區涌浪時空特征和艦船在涌浪中的運動狀態展開。各海情都對應特定的艦船搖蕩系數,確立該艦船搖蕩系數并和海浪時空特征結合,得到窗口期。
4.1 窗口期的影響因素的定義
窗口期影響因素主要有艦船的搖蕩系數、涌浪的波高與周期、風區影響,同時,每個地區都有一定的影響系數。艦船在一定的搖蕩頻率內,仍然可以完成進塢操縱。基于此,現定義在搖蕩頻率可以滿足進塢需求的搖蕩頻率閾值為艦船搖蕩的影響系數K船,其中橫搖、縱搖、垂蕩的放大系數分別記為a橫、b縱、c垂,并忽略除該三個運動外的其他運動。因此艦船搖蕩影響系數如式(12):

引入風干擾力系數為e風,用于表示風速、風向對艦船的整體影響力。涌浪周期內高波出現的頻率記為f涌,表示在每個時間間隔內涌浪周期中高波出現的次數。通過三個系數定義,基本將隨機涌浪窗口期的出現要素包含,但由于需考慮地區差異值對窗口期的影響,可監測不同海區的1m~4m 涌浪出現頻率和波群個數,引入地區校正系數G地。地區校正系數將對不同海區的影響力進行修正,以便適應各海區的任務需要。
4.2 窗口期的實時判斷
基于上述定義,可提出窗口期判斷數學模型,現設A為窗口期出現因素,結合上述定義得式(13):

在該公式下,取10min 內船舶中出現不利于進塢橫搖、縱搖、垂蕩出現的次數。大于5 次以上時取小于0.5,基于3 次與5 次之間取0.5,小于3 次取0.7。在10min 內風速大于氣墊船進塢所能接受風速時取小于0.5,處于最大承受風速和適航風速之間取0.5,處于適航風速及以下時取0.7。在10min時間間隔內涌浪周期中出現高波次數大于三次取小于0.5,其余取0.5及以上。地區校正系數與常年涌浪時空特征有關,如臺海地區取1.25 及以上,亞丁灣附近取0.9等,但需后續調整論證。
綜上所述,當且僅當A小于0.55時,存在氣墊船進塢窗口期,但后續實際應用時需引入地區校正進行修改。窗口期的時間長度與波群的數量存在很大關系,觀察連續幾組波群小波高涌浪和高波間的相位關系,計算波浪波長D和波群中低浪的傳播速度,在地區校正后可以得出其低波高時出現的時間,基于此提出了窗口期時間簡化方程如式(14):

并于海浪觀測周期中取得標繪相應出現位置,可記錄相應的時間。波浪波長和波速實際測量相對困難,需結合衛星遙感影像進行研判。
4.3 窗口期的未來預測
窗口期的未來預測需圍繞海浪預報模型或波浪能[9]展開。可預報海面風場驅動WW3 模式[10],對未來幾個小時的海浪場預報。或利用神經網絡模型構建BP 網絡預測模型,引入海情數據。在該神經網絡中,利用WW3 模式所預報的海浪有效波高、波向作為輸入層,以現有浮標和其他波向、波高、周期觀測數據作為輸出層,其訓練函數為最速下降BP算法。整體預測模型為一層隱層,4個隱層節點的人工網絡模型。若搭建深度學習網絡時,可設置多個隱層和多個隱層節點[11]。在預測過程中,利用最小二乘法將海浪數據引入擬合算法,并將預測的海情數據等轉為艦船未來搖蕩運動響應。利用式(13),計算出各階段的窗口期出現因素,結合式(14),得出時間分布圖像,得到未來窗口期的時間分布。
5 氣墊艇進塢效能評估模型
基于窗口期預測模型,我們可預測未來某時刻氣墊艇進塢的時機。為了優化氣墊艇進塢效能,基于多種模型和方法,提出了氣墊艇進塢效能的評估模型和相關計算方法。
5.1 基于現在點模式下的預測誤差
基于氣墊艇和投放母艦的態勢關系,選取氣墊艇和母艦態勢中現在點作為預測的基點,并以此提出了氣墊艇進塢時預測誤差,輔助指揮員修正進塢態勢。采用基于現在點預測窗口期模式時,該時刻下的窗口期誤差包含四大部分:1)平臺測控誤差;2)監測與預報手段誤差;3)地區校正系數確立誤差;4)平臺與進塢母艦機動的誤差。同時在各方向上,誤差滿足正態分布的規律,如式(15),并可歸類于側向和縱向,得到了預測誤差模型,并由此我們可以得到單次窗口期出現概率計算,如式(16~17):
1)x,y,z 對應橫搖,縱搖,垂蕩;2)f監,1λ,涌浪規律監測誤差;3)φ1進塢平面二維范圍內橫縱搖離散規律通過對比預測誤差和單次窗口期出現概率,我們可得到窗口期出現規律預測各階段的分布規律和誤差大小,進一步優化了進塢效能。
5.2 進塢效能的計算方法
氣墊艇進塢效能則需要通過ADC 模型法[12]進一步計算。A 為可用性,D 為可信性,C 為進塢能力,基于傳統的ADC能力矩陣,如式(18)得:
引入氣墊艇進塢狀態后,系數A 可用性為式(19),D可信性為式(20):
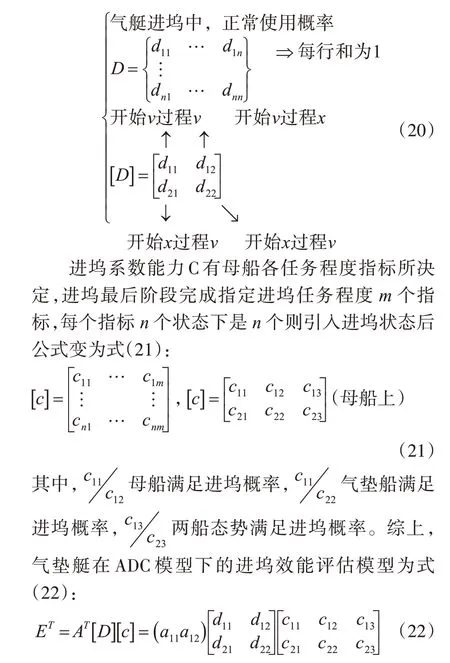
基于該模型我們可以分析在全墊升態[13]和全過程中氣墊艇進塢的能力和效能,為未來指揮員的決策部署提供更好的建議。
5.3 進塢模型的確立
基于艦船在長周期涌浪下的運動模型、窗口期預測方法、進塢效能的檢驗,提出了氣墊艇進塢時刻的運動模型,即氣墊艇進塢金字塔(如圖4)。
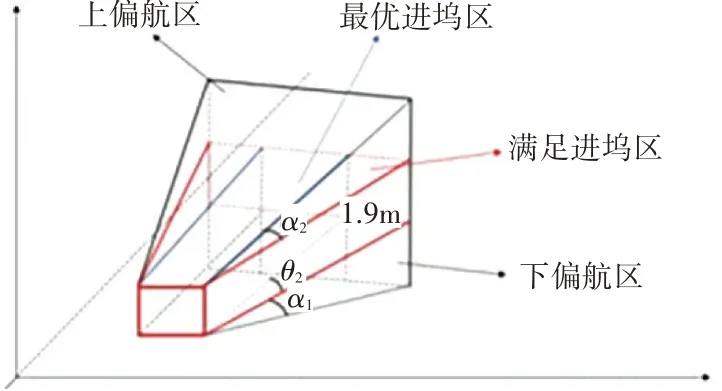
圖4 氣墊艇進塢金字塔
氣墊艇進塢金字塔依據氣墊艇進塢時刻的母艦和氣墊艇的態勢關系,母艦自身尾部裝備的性能與工作狀態,將母船尾部視為規則長方體,氣墊艇視為的錐體,構建的三維進塢多邊形。該模型將整個氣墊艇進塢區域劃分為:上偏航區、下偏航區、最優進塢區、滿足進塢區。其中α1為縱向下部由于氣墊艇自身在長周期涌浪下運動和艉跳板影響的下段進塢偏向角,α2縱向上部由于氣墊艇自身在長周期涌浪下運動和艉跳板影響的上段進塢偏向角,θ1為橫搖和艦船在風流中偏移導致的橫向偏向角。
基于此和經驗得,最優進塢區滿足條件為1)正對塢門;2)左右無偏航;3)上下跳板無干擾。滿足進塢區為1)左右偏航不超過2m;2)偏差65CM內;3)橫向偏航角小于30°的區域。上下偏航區為1)母船尾部和氣墊艇態勢差(上下移動)1m~2m;2)縱搖角度為0~0.8°的區域。除四個區域外,其他區域為危險進塢區,容易發生碰撞危險。
6 結語
本文分析各地區大洋涌浪的時空特征,結合艦船在波浪中的運動響應和涌浪特征,針對性地提出了氣墊艇窗口期的發現判斷方法,并對未來出現的窗口期進行預測和氣墊艇進塢效能評估的模型。該方法為指揮員在引導氣墊船進塢過程中提供了參考意見,該預測模型不僅可應用于氣墊船,還可指導艦載機的起降,極大地減少環境因素對裝備使用和人員安全的影響。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
