基于圖像視場(chǎng)匹配的光電吊艙陀螺漂移補(bǔ)償方法研究*
2022-08-02 02:17:32趙志剛王德飛謝安寧陳明亮
艦船電子工程 2022年6期
趙志剛 王德飛 劉 虎 謝安寧 尚 乾 陳明亮
(中國(guó)人民解放軍63895部隊(duì) 孟州 454750)
1 引言
光電吊艙作為一種重要的偵查告警平臺(tái),具有集成度高、輕巧便利、譜段覆蓋面廣和技術(shù)成熟度高等優(yōu)勢(shì),在民用和軍事領(lǐng)域應(yīng)用非常廣泛[1~2]。尤其在軍事領(lǐng)域,已經(jīng)成為機(jī)載、艦載和車(chē)載偵查裝備必不可少的部分。特別是作為無(wú)人偵察機(jī)的核心部分,填補(bǔ)了有人駕駛飛機(jī)進(jìn)行戰(zhàn)術(shù)偵查的固有限制,展示出了巨大的發(fā)展?jié)摿Α状尉植繎?zhàn)爭(zhēng)也表明,具備先進(jìn)光電吊艙技術(shù)的國(guó)家,在戰(zhàn)爭(zhēng)制信息權(quán)的爭(zhēng)奪中,具備碾壓優(yōu)勢(shì),為直接攻擊提供了強(qiáng)大的支持。幾十年來(lái)一直是各國(guó)競(jìng)相研發(fā)、推廣應(yīng)用的熱點(diǎn)[3~6]。
陀螺傳感器是光電吊艙的核心器件之一,在干擾力矩、噪聲和溫度等因素的作用下,光電吊艙啟動(dòng)后陀螺會(huì)發(fā)生慣性漂移,這種漂移會(huì)導(dǎo)致光電吊艙的光學(xué)視軸也隨著漂移,最終影響光電吊艙的技術(shù)指標(biāo)精度。因此,必須采用相應(yīng)的措施對(duì)光電吊艙陀螺的漂移進(jìn)行補(bǔ)償。通常,對(duì)陀螺漂移的補(bǔ)償采用對(duì)陀螺輸出值進(jìn)行積分并求取平均值來(lái)實(shí)現(xiàn);或者利用組合導(dǎo)航原理,對(duì)陀螺輸出值進(jìn)行算法補(bǔ)償。但這些技術(shù)都需要在光電吊艙上加裝GPS 或者其他傳感器,增加了設(shè)備的成本,更重要的是,增大了設(shè)備的體積、重量,與未來(lái)戰(zhàn)爭(zhēng)中光電吊艙向高度集成、靈巧便利的發(fā)展趨勢(shì)相悖[7~13]。
為了減少甚至消除陀螺漂移對(duì)光電吊艙指示精度的影響,文章提出了一種基于圖像視場(chǎng)匹配的光電吊艙陀螺漂移補(bǔ)償方法,在不增加額外附屬設(shè)備的條件下,實(shí)現(xiàn)光電吊艙陀螺漂移的自動(dòng)補(bǔ)償。實(shí)測(cè)檢驗(yàn)證明,補(bǔ)償方法簡(jiǎn)便可行,具備一定的工程應(yīng)用價(jià)值。
2 陀螺漂移的原因
光電吊艙中陀螺漂移誤差主要由陀螺固有因素和外在環(huán)境因素共同引起。
1)陀螺固有因素
機(jī)械結(jié)構(gòu)方面:體現(xiàn)在使用過(guò)程中會(huì)有各種干擾力矩作用在陀螺儀上,這些力矩就像掛在框架上的重物一樣,會(huì)使陀螺儀進(jìn)動(dòng),使陀螺轉(zhuǎn)軸相對(duì)慣性空間漸漸偏離起始位置,從而破壞了陀螺儀的定軸性,對(duì)陀螺儀使用造成誤差。
構(gòu)成器件方面:噪聲是導(dǎo)致陀螺漂移的主要因素,噪聲一般為白噪聲,包括散粒噪聲、相對(duì)強(qiáng)度噪聲、熱噪聲,以及不占主要成分的熱相位噪聲、量化噪聲和其他環(huán)境引入的噪聲等,其產(chǎn)生的主要原因是為了構(gòu)成陀螺的干涉光路,保證光路互易性以及靈敏度的最優(yōu)化,在光路中引入了各種器件。但由于這些器件的性能不佳以及器件引入與光纖的對(duì)接所帶來(lái)的光軸不準(zhǔn)、接點(diǎn)缺陷引起的附加損耗和散射等,將產(chǎn)生破壞互易性的新因素,進(jìn)而產(chǎn)生漂移。
2)外在環(huán)境因素影響
溫度的影響:溫度對(duì)于陀螺的影響主要為溫度變化、溫度變化率和溫度梯度三個(gè)方面[14]。溫度變化對(duì)光纖陀螺的影響為陀螺工作溫度變化將導(dǎo)致光源發(fā)出的光不穩(wěn)定,其波長(zhǎng)將隨溫度發(fā)生變化。同時(shí),光纖折射率也將發(fā)生變化導(dǎo)致相位變化。另外,光纖發(fā)生線膨脹,導(dǎo)致光纖長(zhǎng)度變化。根據(jù)光纖陀螺工作原理,溫度引起的這些變化都將引起陀螺漂移;溫度變化率對(duì)光纖陀螺的影響為溫度變化率通過(guò)影響光纖環(huán)的內(nèi)部溫度分布,造成光纖環(huán)圈內(nèi)部膨脹以及折射率不均勻面對(duì)在其中傳輸?shù)膬墒猱a(chǎn)生不同的影響,由此引入非互易相移,產(chǎn)生光纖陀螺漂移。溫度梯度對(duì)光纖陀螺的影響為當(dāng)外界溫度變化時(shí),殼體內(nèi)對(duì)溫度敏感的光纖環(huán)器件會(huì)經(jīng)歷一次熱傳導(dǎo)過(guò)程,改變殼體內(nèi)光纖和光纖環(huán)本身的性能以及光纖環(huán)內(nèi)部的溫度場(chǎng)分布,從而引入非互易相移,進(jìn)而產(chǎn)生陀螺漂移。
振動(dòng)的影響:光波的偏振態(tài)受到磁場(chǎng)影響會(huì)發(fā)生變化,這種變化方式與光的傳播方式有關(guān),這種現(xiàn)象稱為磁光法拉第效應(yīng)。由于應(yīng)用環(huán)境中不可避免的會(huì)存在磁場(chǎng),因此磁光法拉第效應(yīng)也會(huì)影響陀螺的非互易效應(yīng),產(chǎn)生漂移[15~16]。
3 補(bǔ)償原理
光電吊艙在啟動(dòng)后(各分系統(tǒng)均正常工作),將方位∕俯仰調(diào)整至零位,然后處于慣性靜止?fàn)顟B(tài)。在光學(xué)視場(chǎng)內(nèi)選擇目標(biāo)進(jìn)行觀瞄,同時(shí)開(kāi)始計(jì)時(shí)。Δt 為目標(biāo)觀瞄時(shí)間,一般選擇4s~6s。在選取目標(biāo)時(shí),原則是輪廓清晰、辨識(shí)度高、特征明顯,且目標(biāo)與背景的相似度大于30%~50%為宜。計(jì)時(shí)結(jié)束后,通過(guò)計(jì)算得到在Δt 時(shí)間內(nèi)目標(biāo)在光學(xué)視場(chǎng)中的方位移動(dòng)像元數(shù)(Δx)和俯仰移動(dòng)像元數(shù)(Δy)。計(jì)算示意圖如圖1 所示,p 和p'為目標(biāo)移動(dòng)前后的位置。根據(jù)目標(biāo)在光學(xué)視場(chǎng)中方位和俯仰兩個(gè)方向的移動(dòng)的像元數(shù)、光學(xué)系統(tǒng)焦距f 和成像探測(cè)器的像元大小l ,計(jì)算Δt 時(shí)間內(nèi)光電吊艙視軸漂移的方位角度A 和俯仰角度E:
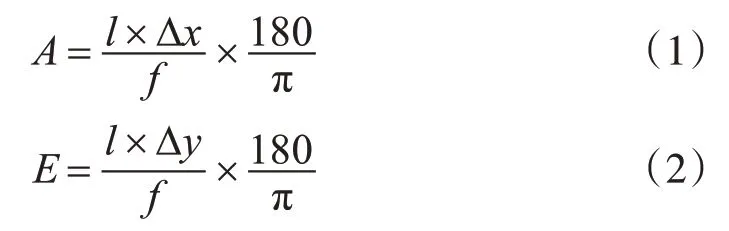
依據(jù)視軸漂移的方位和俯仰角度,得到陀螺方位和俯仰方向的漂移補(bǔ)償參數(shù)ωA和ωE為

漂移補(bǔ)償?shù)臉?biāo)準(zhǔn)為補(bǔ)償閾值,由光學(xué)系統(tǒng)中允許的每秒最大視場(chǎng)漂移角度計(jì)算得到,為光電吊艙當(dāng)前視場(chǎng)的1%,即:

式中,n 為光學(xué)成像探測(cè)器方位和俯仰像元數(shù)中的較大值。
具體方式為首先計(jì)算補(bǔ)償閾值φ,然后判斷漂移補(bǔ)償參數(shù)ωA和ωE是否大于補(bǔ)償閾值φ,如果大于補(bǔ)償閾值φ,將ωA和ωE代入陀螺的采樣程序,進(jìn)行同值反向陀螺漂移補(bǔ)償。如果陀螺方位和俯仰漂移補(bǔ)償參數(shù)都不大于補(bǔ)償閾值,說(shuō)明光電吊艙的陀螺漂移量可以忽略,不需要進(jìn)行任何操作處理。
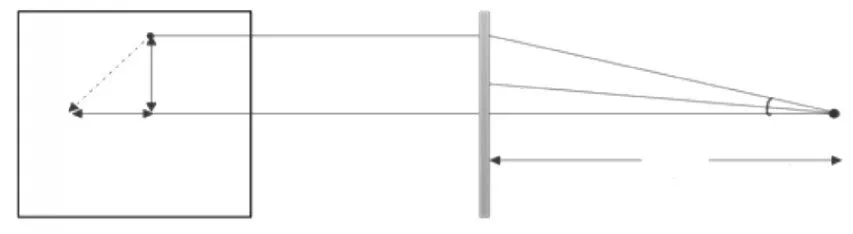
圖1 光電吊艙視場(chǎng)角計(jì)算示意圖
4 試驗(yàn)驗(yàn)證及分析
為了驗(yàn)證補(bǔ)償方法是否有效,在某型光電吊艙上進(jìn)行了實(shí)測(cè)(該吊艙未加裝GPS等額外的傳感器進(jìn)行陀螺漂移補(bǔ)償)。按照文中提出補(bǔ)償原理,首先進(jìn)行了陀螺采樣程序編寫(xiě),然后注入到操作軟件中,最終通過(guò)軟件界面上的俯仰∕方位“零漂+”或“零漂-”進(jìn)行步進(jìn)式調(diào)整,實(shí)現(xiàn)陀螺的漂移補(bǔ)償。軟件操作界面如圖2 所示。光電吊艙加電之后,待各項(xiàng)功能正常運(yùn)行后,手動(dòng)操作光電吊艙選擇輪廓清晰、辨識(shí)度較高的目標(biāo)進(jìn)行觀瞄。確定好目標(biāo)后,操作光電吊艙,使得視場(chǎng)中心的十字靶心指向目標(biāo)中心,然后開(kāi)始定時(shí)監(jiān)視,查看光電吊艙的陀螺漂移情況。選擇十字靶心指向目標(biāo)中心的時(shí)刻為T(mén)0,采集視頻圖像,然后每間隔30s,采集一副圖像,按照光電有效攻擊時(shí)長(zhǎng)40s~60s 的時(shí)段估算,采集4 副圖像為一組。未采用任何補(bǔ)償技術(shù)的光電吊艙的陀螺漂移如圖3 所示。同時(shí)還記錄了對(duì)應(yīng)時(shí)刻的光電吊艙方位∕俯仰角度,如圖4所示。

圖2 陀螺漂移補(bǔ)償操作軟件界面
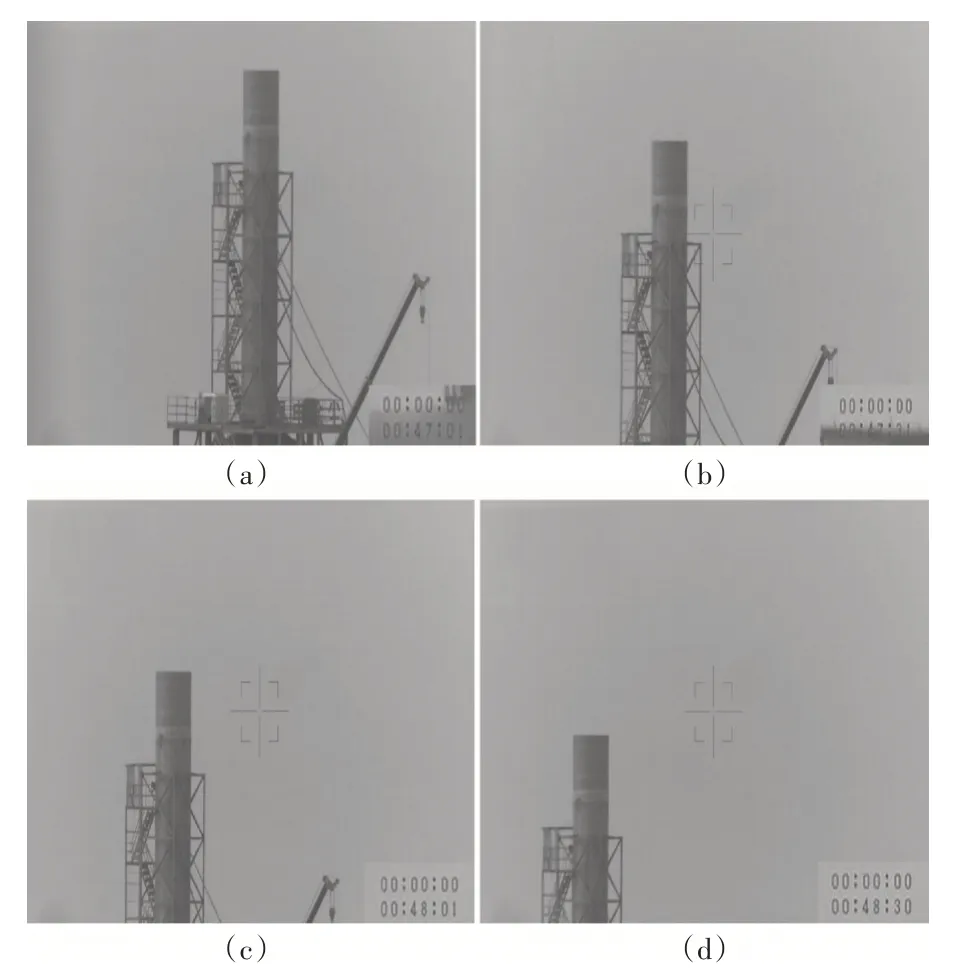
圖3 補(bǔ)償前90 s內(nèi)靶心漂移圖((a)~(d)相鄰兩圖間隔30 s)
由圖可知,陀螺在未進(jìn)行漂移補(bǔ)償前,90s內(nèi)的十字靶心圖像出現(xiàn)了較大的偏移。在T0時(shí)刻,十字靶心準(zhǔn)確指向目標(biāo)中心區(qū)域;T30時(shí)刻,十字靶心飄向目標(biāo)中心區(qū)域的右上方;在T60和T90時(shí)刻漂移量進(jìn)一步增大,如果光電吊艙距離觀瞄目標(biāo)較遠(yuǎn),從T30時(shí)刻即可視為脫靶,無(wú)法繼續(xù)進(jìn)行后續(xù)動(dòng)作。從光電吊艙對(duì)應(yīng)時(shí)刻的方位∕俯仰角度來(lái)看,T0到T90,方位發(fā)生了0.6253°的漂移,俯仰發(fā)生了0.5917°的漂移,屬于較大角度的漂移,必須進(jìn)行技術(shù)干預(yù)。
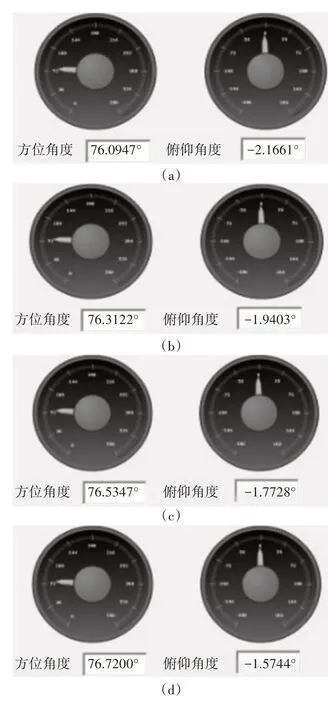
圖4 補(bǔ)償前90s內(nèi)靶心方位∕俯仰角度((a)~(d)相鄰兩圖間隔30s)
操作軟件界面的補(bǔ)償按鈕,先進(jìn)行初步陀螺漂移補(bǔ)償,觀察十字靶心的漂移速度明顯變緩之后,再進(jìn)行精細(xì)補(bǔ)償調(diào)整。同樣的,選擇輪廓清晰、辨識(shí)度高的目標(biāo)進(jìn)行捕獲,十字靶心精確指向目標(biāo)的中心區(qū)域,然后觀察方位和俯仰位置的漂移,進(jìn)行反向調(diào)整,直至十字靶心穩(wěn)定指向目標(biāo)中心區(qū)域。對(duì)試驗(yàn)中的光電吊艙進(jìn)行陀螺漂移補(bǔ)償后,選擇相同的場(chǎng)景、觀瞄目標(biāo)、光學(xué)系統(tǒng)焦距等參數(shù),進(jìn)行90s 觀瞄監(jiān)測(cè),在T0、T30、T60和T90時(shí)刻的圖像如圖5所示,同時(shí),記錄對(duì)應(yīng)時(shí)刻光電吊艙的方位∕俯仰角度,如圖6所示。
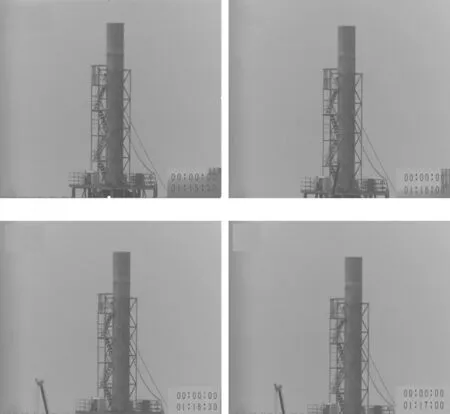
圖5 補(bǔ)償后90 s內(nèi)靶心漂移圖((a)~(d)相鄰兩圖間隔30s)
由圖可知,補(bǔ)償后光電吊艙陀螺的漂移有了明顯改善,90s內(nèi)的漂移量相對(duì)較小,十字靶心偏離中心區(qū)域較小,按照光電有效攻擊時(shí)長(zhǎng)40s~60s的時(shí)間評(píng)估,采用文章提出的補(bǔ)償技術(shù)可以確保十字靶心持續(xù)指向目標(biāo),補(bǔ)償方法是有效的。從方位∕俯仰的漂移角度來(lái)看,90s 內(nèi)方位漂移了0.0948°,俯仰漂移了0.1053°,與未進(jìn)行技術(shù)補(bǔ)償前的方位∕俯仰漂移量相比,實(shí)現(xiàn)了接近1 個(gè)數(shù)量級(jí)的提高。綜合來(lái)看,文中提出的補(bǔ)償技術(shù),對(duì)于光電吊艙陀螺的指向穩(wěn)定性是有效的,具備工程應(yīng)用價(jià)值。
從圖中可知,雖然進(jìn)行技術(shù)補(bǔ)償后,光電吊艙的陀螺漂移有了明顯的改善,但依然存在微小的漂移,沒(méi)有完全消除。之所以依然出現(xiàn)較小的漂移,分析原因主要有三點(diǎn)。第一點(diǎn)是在光電吊艙陀螺采樣程序編寫(xiě)時(shí),方位∕俯仰的單次補(bǔ)償步進(jìn)量稍大,雖然提高了調(diào)整效率,但是影響了補(bǔ)償精度。如果把方位∕俯仰的單次調(diào)整量修改為大的幅值和小的幅值兩種,就可以通過(guò)大的幅值實(shí)現(xiàn)初始粗調(diào),然后再通過(guò)小的幅值進(jìn)行后期精調(diào),操作就會(huì)更加科學(xué)合理,陀螺漂移補(bǔ)償?shù)木染蜁?huì)更高;第二點(diǎn)是為了選擇合適的觀瞄目標(biāo),同時(shí)模擬機(jī)載試驗(yàn)場(chǎng)景,試驗(yàn)時(shí)將光電吊艙放置在了距離地面60多米高的樓房上,同時(shí)使用液壓升降車(chē)模擬機(jī)載平臺(tái)。風(fēng)速、溫度變化和液壓升降車(chē)的自身穩(wěn)定性都會(huì)對(duì)光電吊艙的指示精度產(chǎn)生影響。這種使用場(chǎng)景在補(bǔ)償時(shí)不能去除,需要綜合考慮。第三是人為因素。個(gè)體的習(xí)慣差異、心理素質(zhì)不同,在操作光電吊艙進(jìn)行試驗(yàn)時(shí),也會(huì)帶來(lái)誤差。后續(xù)的試驗(yàn)中,將會(huì)繼續(xù)優(yōu)化陀螺采樣程序,調(diào)整方位∕俯仰的“零漂”步進(jìn)量,模擬更加逼真的機(jī)載試驗(yàn)場(chǎng)景,強(qiáng)化光電吊艙技術(shù)保障人員的實(shí)操技能,更好地優(yōu)化光電吊艙陀螺的漂移,全面提升設(shè)備性能。
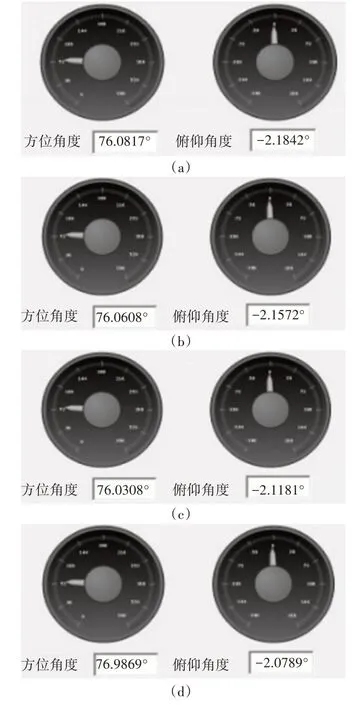
圖6 補(bǔ)償后90 s內(nèi)靶心方位∕俯仰角度((a)~(d)相鄰兩圖間隔30 s)
5 結(jié)語(yǔ)
光電吊艙陀螺的漂移除了影響偵查過(guò)程中的指示精度外,還會(huì)影響跟蹤過(guò)程中的指示精度,尤其是當(dāng)跟蹤遠(yuǎn)距離的小目標(biāo)時(shí),指示的不穩(wěn)定會(huì)使目標(biāo)不間斷的脫靶。最明顯的表現(xiàn)是帶有激光測(cè)距裝置的光電吊艙,在陀螺漂移較大的情況下,對(duì)遠(yuǎn)距離目標(biāo)進(jìn)行照射∕測(cè)距時(shí),經(jīng)常會(huì)發(fā)生無(wú)激光回波信號(hào)的現(xiàn)象。因此,對(duì)于光電吊艙陀螺的漂移,必須進(jìn)行有效補(bǔ)償。文中提出的補(bǔ)償方法,不需要增加額外的設(shè)備,對(duì)于光電吊艙的結(jié)構(gòu)狀態(tài)沒(méi)有任何影響,簡(jiǎn)單可行,通過(guò)試驗(yàn)證明,該方法可以對(duì)光電吊艙陀螺的漂移進(jìn)行有效的補(bǔ)償,為工程應(yīng)用提供了有價(jià)值的參考。
