數據驅動下供應鏈系統變更自適應預測控制
2022-08-03 09:48:16劉煒恒慶海李慶奎
傳感器世界 2022年1期
關鍵詞:系統
劉煒 恒慶海 李慶奎
北京信息科技大學自動化學院,北京 100101
0 前言
供應鏈系統是由供應商、制造商、分銷商和零售商組成的復雜網絡系統,具有原材料采購、材料轉化為中間產品和成品以及成品分銷的功能,并通過控制信息流和物流[1]傳遞給客戶。目前,大多數的動態供應鏈系統采用機理建模[2]的方式,利用物料平衡等原理對供應鏈系統進行建模,然后從控制工程的角度設計控制策略,改善系統的性能,抑制不確定需求對供應鏈系統的影響,以達到更加高效的供應鏈管理和決策。事實上,復雜供應鏈系統由于節點多,運行時間尺度不一,以及模態混雜,機理建模通常不易實現,而利用供應鏈運作過程中產生的數據進行建模比機理建模更加貼近實際。在無法獲取系統內部參數的條件下,子空間辨識方法可以利用輸入輸出數據獲得預測矩陣,這種直接數據驅動方法在學術界和工業界已有使用,WOODLEY B R等人[3]將該子空間辨識方法進行擴展并應用到了H∞控制中,其設計方法更方便擴展到自適應控制算法。GHASEMI H等人[4]的研究表明,子空間預估器可以對系統未來狀態進行預測,滿足預測控制的要求。KADALI R等人[5]提出了利用預估器設計預測控制的算法。另一方面,對于供應鏈系統為了降低企業成本,優化生產策略,在應對客戶需求的不確定性下出現的庫存積壓以及供應鏈中生產環節的變更造成的庫存波動,許多學者[6-7]采用預測控制策略進行生產庫存的決策。
預測控制來源于工業應用[8],在化工、航天等領域均有涉及。由于其對建模精確程度要求不高,并且在控制周期內采用滾動優化策略,故對于系統模型失配和干擾抑制的性能較好,所以在供應鏈系統中也常使用。BOSE S等人[9]研究了預測控制在供應鏈系統中的應用,結果表明,這種滾動優化的策略在供應鏈系統的優化決策中有突出的優勢。PEREA-LóPEZ E等人[10]采用模型預測控制策略,尋找多產品供應鏈中利潤最大化的最優決策變量,在集中管理和分散管理方式下均取得了較好的效果。
傳統動態供應鏈系統的研究一般是在基于機理建模下討論末端不確定用戶需求對供應鏈系統各級節點的影響[11-12]。然而,由于突發事件或各種因素的影響造成供應鏈系統變更是不可避免的。研究基于變更設計的供應鏈系統分析、控制及預測問題,具有重要的現實意義,尤其在新冠疫情及貿易爭端背景下,全球供應鏈系統受到重要影響,有些處于中斷或阻塞狀態,對經濟平穩運行產生巨大影響。眾多研究者從不同角度開展相關研究,如:QI X等人[13]研究了靜態方式下存在需求中斷時供應鏈協調的條件;HEARNSHAW E J S等人[14]的研究表明,供應鏈系統變更首先會影響該節點中的設備,其次,由于供應鏈的級聯特性,某一節點的變更會使得該供應鏈中的其他設備也受到影響;BLACKHURST J V等人[15]指出由于供應鏈之間的關聯性、全球性,所以在中斷等突發事件的影響下會破壞人員、貨物、信息的流動而使供應鏈的成本增加。為解決上述問題,ZHAO K等人[16]使用拓撲分析等技術提高了供應鏈網絡的魯棒性;BEHZADI G等人[17]利用魯棒優化技術,得到了期望利潤和風險為目標的風險規避解。上述研究大多基于供應鏈管理角度研究系統變更造成的不良影響并未考慮各生產節點的動態,本文旨在從工程控制論的角度設計控制器來進行生產決策,利用數據驅動方法可以很方便地將供應鏈系統變更問題建模為系統內部參數的變化,從而避免由于系統內節點變更導致對供應鏈系統的不良影響。
本文借鑒上述文獻的思想,從工程控制論的角度,針對動態供應鏈系統中節點發生變更的情況,提出了一種基于數據驅動的自適應預測控制方法。首先,為更加符合實際供應鏈運行狀況,利用數據驅動的方法建立供應鏈系統的子空間預估模型,由于運行過程中系統發生變更,故引入滑動窗口機制對系統進行在線辨識,利用異常數據檢查機制更新預估器矩陣;其次,將子空間預估器作為預測模型,利用預估矩陣參數設計自適應預測控制器,通過滾動優化和反饋校正機制,進一步求得多級供應鏈系統在運作過程中發生內部節點變更狀況下的庫存控制策略;最后,以三節點生產—庫存供應鏈系統為例,驗證所提出的方法。在仿真部分,驗證了基于數據建模的準確性和供應鏈系統在自適應預測控制的生產策略下,其在內部節點發生變更前后庫存水平的波動狀況,仿真結果表明該方法的魯棒性和有效性。
1 問題描述
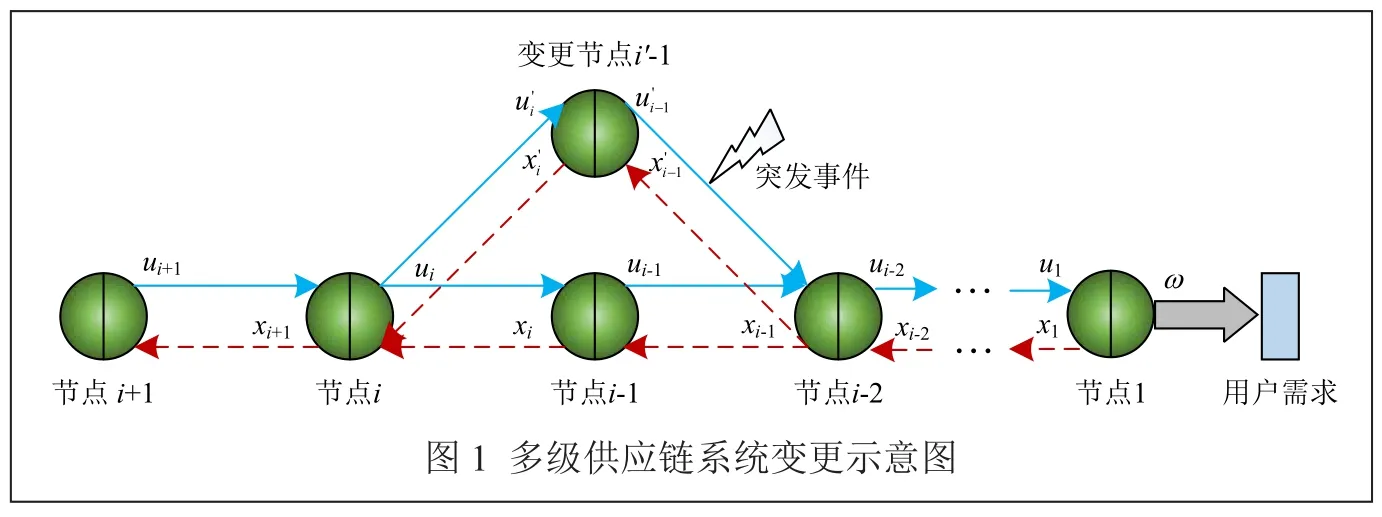
如圖1所示的多級供應鏈系統,其中,xi表示下游節點給上游節點的訂單量;ui表示節點i的生產量;yi表示每個生產節點的庫存數量。假設,每個節點的yi和ui均可獲得,且在理想狀態下不考慮運輸途中的損失,根據文獻[18],供應鏈系統動態可以用差分方程來表達,當多級供應鏈中的某一個節點或者幾個節點由于突發原因產生變更時,必然造成系統內部參數的變化,這些變化最終會反映到系統的輸入輸出數據上。本文采用數據驅動的思想對供應鏈系統進行在線建模,利用預測控制求解生產策略,從而使系統在發生變更后仍然能夠穩定運行。
由于多級供應鏈系統末端用戶需求一般視作不確定的,且與生產量之間是相互獨立的,采用POMOSEP法對上述多級供應鏈系統進行辨識。基于數據驅動的供應鏈系統可以用下式描述:

其中,(k) ∈Rm——各級理想生產量;
(k)∈Rl——理想狀態下各級庫存量;
f(·) ——未知函數;
θ(k) ——時變參數用來刻畫系統的變更情況,采用有限時域的滑動窗口在線辨識方法,遞推更新模型。在進行閉環辨識的過程中會有各種干擾,定義輸入輸出信號測量模型:

其中,ω∈Rl、v∈Rm分別為各級庫存量的測量噪聲和生產量的測量噪聲,ω和v是有界的且與過去的控制量u不相關。子空間預估器采用如下不確定形式描述:

uf=節點未來的生產量;
k——當前采樣時刻,每個元素均為列向量;
wp=過去庫存水平和生產量的輸入輸出矩陣;
Np——預測時域;
Nc——控制時域。
公式(3)表征了各級生產量與各級庫存量之間的關系,模型參數可直接作為控制器的設計參數,ΔLw和ΔLu表示模型的不確定性。
2 子空間辨識與預測控制
2.1 自適應子空間辨識與異常數據檢查策略
構造輸入量U的Hankel矩陣如下:
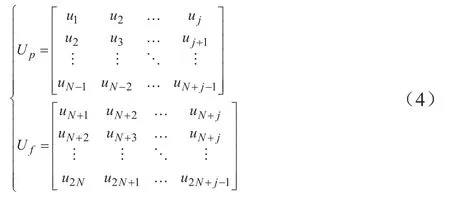
其中,p、f——“過去”和“未來”;
Up——系統“過去”的輸入;
Uf——系統“未來”的輸入。

其中,L=[L,L]為子空間矩陣,滿足L1∈R(l×N)×((l+m)×N),
12分別表示狀態和確定性輸入子空間預估器矩陣。
公元618年,唐國公李淵長安稱帝,建立了繁榮的大唐帝國,從此中國封建社會進入了最為強盛的時期。一個民族音樂文化的發展壯大,有的時候需要幾個世紀的文化沉淀,而就在唐朝建立初期,這個漫長的音樂文化沉淀已悄然開始。它融會貫通、博采眾長,造就出了歷史上空前強盛的局面,為中國古代音樂文化做出了積極的貢獻。唐代的音樂機構主要分由政府管轄和宮廷管轄兩個不同的體系,其中太常寺是唐代最高的行政機構,大樂署、鼓吹署隸屬于太常寺,屬于政府管理的音樂機構,監管雅樂與俗樂。教坊和梨園則隸屬于宮廷管轄。
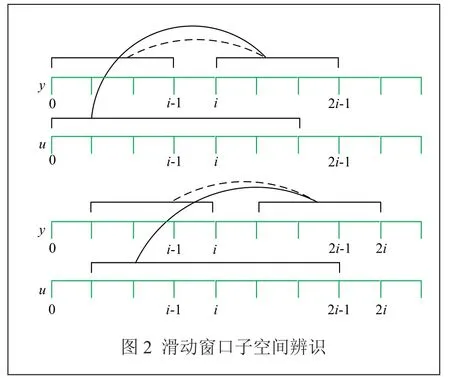
對于式(1)的系統,設計長度為n的滑動窗口方法在線更新用于計算子空間預估器矩陣的數據,并且在每個采樣時刻利用遞推方法更新一次數據集,從而實現預測模型的在線求解。
設Ξ∈R4N(m+l)×j為k時刻的輸入輸出Hankel矩陣:

其中,Wp(k)、Uf(k)和Yf(k)分別為閉環系統采集到的過去生產量和庫存水平數據矩陣、未來生產量數據矩陣和庫存水平數據矩陣。將Ξ最左列的[19]數據定義為在k+1采樣時刻,將一組新的生產量和庫存水平數據定義為,其 中,
在k+1采樣時刻的輸入輸出Hankel矩陣Ψ為:

其中,Wp(k+1)、Uf(k+1)和Yf(k+1)與Wp(k)、Uf(k)和Yf(k)的定義類似。
為了保證滾動窗口大小固定,須將ξ從Ξ中移除,并將ζ添加到Ξ中,因此得到關系式 [Ξ :ζ]= [ξ: Ψ],進一步有 [Ξ :ζ][Ξ :ζ]T= [ξ: Ψ][ξ: Ψ]T,對該式分解得到:

則k+1時刻的輸入輸出Hankel矩陣Ψ的QR分解結果:

同理,對k時刻的Ξ進行上述操作,由上述定義和式(8)可分別求得ζζT和ξξT,進一步可得預估器矩陣R(k+1)中:

故:

其中,chol(·)為Cholesky分解。要得到子空間預估器矩陣,需先求R21(k+1)、R22(k+1)和R32(k+1)。

同理,利用式(8)與Cholesky分解可分別求得R31(k+1)、R22(k+1)和R32(k+1)。

其中, ? 表示偽逆矩陣,通過奇異值分解得到,式(3)表示的子空間預估器模型中,Lw=L1,Lu為L2的前l×Nu列元素。
2.2 異常數據檢查策略
由于動態供應鏈系統的運作過程存在用戶的不確定性需求,各級庫存量的測量過程難免存在噪聲影響,這些因素會降低滑動窗口自適應策略的辨識精度。采用一次預測誤差的數據檢查策略來消除異常數據對在線辨識過程的影響[19-20]。
計算數據更新前的預測誤差:

yk+1——k+1時刻的實測值。

在下一采樣時刻,重復上面的異常數據檢查策略。
通過滑動窗口自適應機制與異常數據檢查策略有ΔLw→0,ΔLu→0,故式(3)可以轉化為:

2.3 控制器設計與自適應預測算法
在預測控制設計中,定義性能指標函數為:

rf——參考庫存水平;
uf——控制量;
Q≥0,R>0。
將上述滑動窗口自適應辨識策略與預測控制相結合,則自適應預測控制問題可以描述為求解如下的優化問題,即:

將式(17)帶入式(18)可得:


系統在每個采樣時刻重新計算式(19)的優化問題,得到最優控制序列uf,取最優控制序列的第一項作為當前的控制率施加到控制系統中。
自適應預測控制算法步驟:
(1)采集多級供應鏈系統中各級生產量與庫存量,構造閉環供應鏈系統的Hankel矩陣;
(2)在采樣時刻k,利用QR分解計算初始Lw和Lu;
(4)利用式(20)計算最優預測控制序列uk,并施加到系統中;
(5)在采樣時刻k+1,采集到新的系統數據時,執行2.2節中的異常數據檢查策略,當新數據異常時,保持uk,否則,進行如下步驟:
(6)構造新的生產量與庫存水平的Hankel矩陣Ψ,通過式(11)~(13)計算R矩陣;
(7)進行異常數據檢查,決定是否更新R矩陣,通過步驟(3)和步驟(4)計算預測輸出和最優預測控制序列uk,然后返回步驟(5)進行異常數據判斷。
3 仿真分析
以三節點生產—庫存供應鏈系統[9]為例,驗證上述算法的有效性,其中,yi(s)為供應鏈系統的3個生產環節的庫存水平;ui(s)為供應鏈系統的3個生產環節的出貨量,其中,θi為生產運輸延遲,αi為損耗系數。

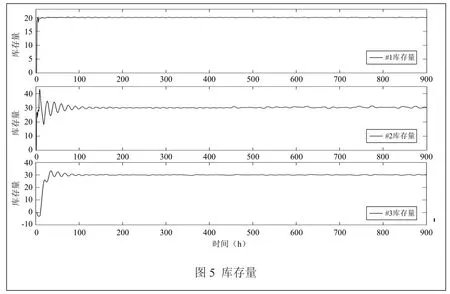
假設三節點生產—庫存供應鏈系統在t=450時,由于突發事件造成生產環節的第二環節發生變更,其延遲系數變為θ2′=3。采用自適應預測控制策略進行生產決策,設置控制時域Nc=40,預測時域Np=60,不確定用戶需求滿足正態分布(μ,σ),其中,μ=0,σ=0.01,庫存水平設定值為一號倉庫20,二號倉庫30,三號倉庫30。仿真結果表明,在上述用戶需求下,采用自適應預測控制策略可以使得庫存水平維持在設定值范圍內。在t=450時,二號節點倉庫發生變更,可以看出,庫存水平雖然波動,但仍在允許范圍,仿真結果如圖5所示。
5 結束語
本文對多級供應鏈系統在正常生產運作過程中某生產環節發生變更的情況下,從控制理論的角度提出了基于數據驅動自適應預測控制的生產-庫存控制策略。為了更符合實際供應鏈系統的運行狀況,文中采用數據驅動的方式對系統進行在線辨識,將生產環節的變更問題建模為系統內部的可變參數。為增加控制器的魯棒性,利用滑動窗口子空間線辨識方法,結合異常數據檢測機制更新預估器矩陣建立系統的預測模型,將子空間預估器參數與預測控制相結合,利用滾動優化與反饋校正機制,設計了自適應預測控制器在線求解最優控制率,最后在仿真部分利用一個三節點生產—庫存供應鏈系統驗證了所提方法能夠在發生系統變更的情況下,將庫存水平維持在給定值允許的誤差范圍內,表明該方法的魯棒性和有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32