橫列式雙傾轉旋翼機控制系統研究
2022-08-05 02:34:48施嘯宇趙君寶黃一敏
導航定位與授時 2022年4期
施嘯宇,余 帆,趙君寶,黃一敏
(南京航空航天大學自動化學院,南京 211100)
0 引言
橫列式雙傾轉旋翼機是設計有一對可傾轉旋翼短艙的獨特飛行器,根據旋翼短艙角度可將其工作模式劃分為直升機模式、過渡模式和飛機模式,因此它同時具備常規直升機的垂直起降和常規固定翼的低功耗巡航的優點。隨著電池、槳葉和電機等上游供應鏈的發展,近兩年大量資本涌入電動垂直起降飛行器(electric Vertical Takeoff and Lan-ding, eVTOL)行業,傾轉旋翼機再度成為研究熱門。橫列式雙傾轉旋翼機這類飛行器由于旋翼短艙的主動傾轉,飛行器本身的氣動特性和操縱特性顯著改變,且需要完成控制舵面的轉換,因此過渡過程具有穩定性差、非線性強和控制難度大等特點。
由于橫列式傾轉旋翼機兼具氣動操縱舵面和旋翼變距操縱,故過渡過程中存在明顯的舵面冗余,因此過渡過程的操縱分配和控制方法的選取是橫列式傾轉旋翼機的兩大控制重難點。夏青元等采用一次分段函數實現操縱分配,并在其設計的傾轉航模上進行飛行驗證;陳永等采用基于前飛速度的二次分段函數實現操縱分配,并在仿真環境中進行驗證。以上研究人員僅考慮到總距通道在過渡過程中需要從高度控制過渡到速度控制,僅從定性角度選取了單調性合理的函數作為過渡系數,因而缺乏理論證明和魯棒性驗證。而且他們的研究對象均是小型航模,其傾轉過渡的速度跨度小且舵面操縱能力足夠強,總距通道的操縱分配策略對標稱過渡效果的影響不大。
國內外各研究所和高校針對橫列式傾轉旋翼機過渡過程控制策略同樣展開了大量研究,其中夏青元單獨設計了姿態內回路和軌跡外回路,通過基于神經網絡補償的自適應控制理論設計內回路,采用經典 PID 理論設計外回路,達到了滿意的控制效果;毋萌采用基于線性模型的模型預測控制(Model Predictive Control,MPC)算法,從而實現依據實際場景在線調整控制器結構和參數;C.Papachristos等針對傾轉三旋翼提出了基于線性二次型調節器(Linear Quadratic Regulator, LQR)控制算法的姿態控制器設計,并進行了仿真驗證;姜澤翔等將基于自抗擾控制器的姿態回路和PID軌跡控制器組合起來,解決了傾轉旋翼無人機抗風性能差的問題。Chen Q.等設計了自適應控制器和低通濾波器,并達到預期的控制性能。以上現代控制理論大都適用于理論仿真而無法工程化,而本文的研究對象是與國內某研究所合作的工業級橫列式雙傾轉旋翼機,因此本文仍然選用物理意義明確、工程經驗成熟且模型置信度兼容性強的PID控制。
1 建模與問題描述
1.1 研究對象描述
本課題來源于和國內某研究所合作的某橫列式傾轉旋翼機飛控系統設計的合作項目,對象無人機包含配有自動傾斜器的橫列式雙旋翼、可縱向轉動的旋翼短艙、渦軸式發動機、機翼、雙垂尾、平尾和輪式起落架。發動機通過機械傳動穩定左右雙旋翼的旋轉,左右雙旋翼的轉速保持一致但方向相反,從而可抵消單個旋翼產生的反作用力矩。飛行器具備常規直升機的操縱機構、常規固定翼飛機的操縱機構和控制旋翼短艙轉動的傾轉機構,其中常規直升機的操縱系統包括單個旋翼的總距角、縱向周期變距以及橫向周期變距,常規固定翼飛機的操縱系統包括升降舵、副翼、方向舵以及襟翼。該無人機設計首飛質量為600kg,其主要設計參數如表1所示。
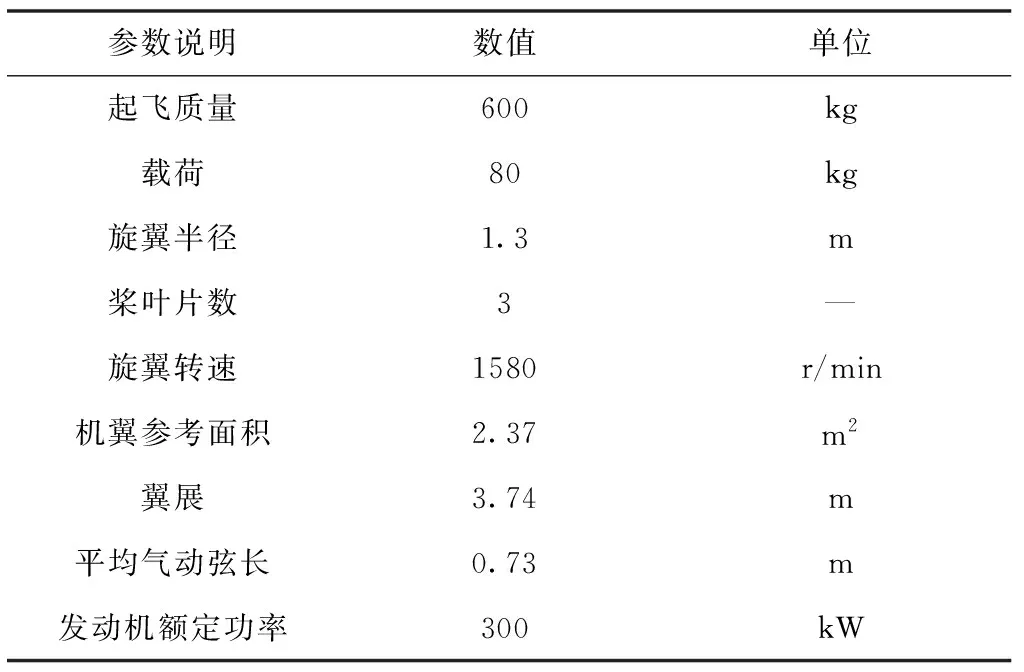
表1 對象無人機的主要設計參數表
1.2 過渡過程描述
本文主要研究平飛定高前提下的傾轉過渡控制策略,將對象橫列式傾轉旋翼機的傾轉過渡過程按照氣動特性和操縱特性劃分為直升機模式操縱段、混合模式操縱段和飛機模式操縱段,如圖1所示。
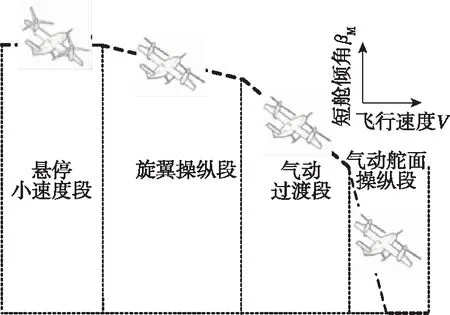
圖1 傾轉過渡過程分段圖Fig.1 Sectional diagram of tilting transition process
1.2.1 直升機模式操縱段
直升機模式操縱段飛行器速度較小且旋翼短艙接近于垂直位置,此時氣動舵面的操縱效率較低,而旋翼變距的操縱效率較高,飛行器的升力主要來源于雙旋翼的拉力,其操縱方式和氣動特性類似于直升機前飛模態。
1.2.2 混合模式操縱段
隨著旋翼短艙的前傾,混合模式操縱段的速度進一步提高,飛行器的升力由旋翼拉力的垂向分量和氣動升力共同組成,氣動舵面的操縱效率進一步提高,而旋翼變距效率由于入流速度的增加而進一步削弱,此時氣動舵面和旋翼變距均有一定的操縱效率,故此段是氣動舵面和旋翼變距的混合控制階段。
1.2.3 飛機模式操縱段
飛機模式操縱段飛行器速度最大且旋翼短艙接近于水平位置,此時旋翼變距的操縱效率足夠小,而由氣動舵面全面接管其操縱權限,旋翼的工作方式類似于螺旋槳推進器,其操縱方式和氣動特點類似于固定翼平飛模態。
1.3 建模與特性分析
本文采用混合機理法建模,基于Rotorlib旋翼葉素模型計算旋翼的氣動力與力矩,針對機體氣動模型采用增量式氣動數據建模,其中包括基態的氣動數據與舵偏產生的氣動數據增量。最后將旋翼模型與機體氣動模型計算得出的力和力矩轉化到機體坐標系下,并代入剛體六自由度運動方程。
圖 2(a)、(b)是以總距和縱向周期變距為輸入的機體系下的時域響應曲線。由圖2(a)可以看出,當短艙傾角為90°時,總距輸入無法引起前向速度響應,隨著短艙傾角的減小,總距能夠引起的前向速度響應逐漸增大;且短艙角小于50°以后,前向速度響應的峰值均大于1m/s,表明在飛機模式操縱段,總距對速度影響較大。由圖2(b)分析可知,縱向周期變距輸入對前向速度的響應隨著短艙角的減小而減小,短艙角為50°時,前向速度響應峰值僅為0.2m/s,這表明縱向周期變距僅在直升機與混合模式操縱段對速度有一定的操縱能力。
圖 2(c)、(d)是以總距和升降舵為輸入的機體系下的時域響應曲線。由圖2(c)可以看出,當短艙傾角大于50°時,高度變化率響應的峰值均在1m/s以上,這說明直升機與混合模式操縱段總距對于高度的操縱影響較大,飛機模式操縱段總距對高度操縱能力持續減弱。由圖2(d)可以看出,升降舵隨著短艙角的減小,對高度的操縱能力會逐漸增強。
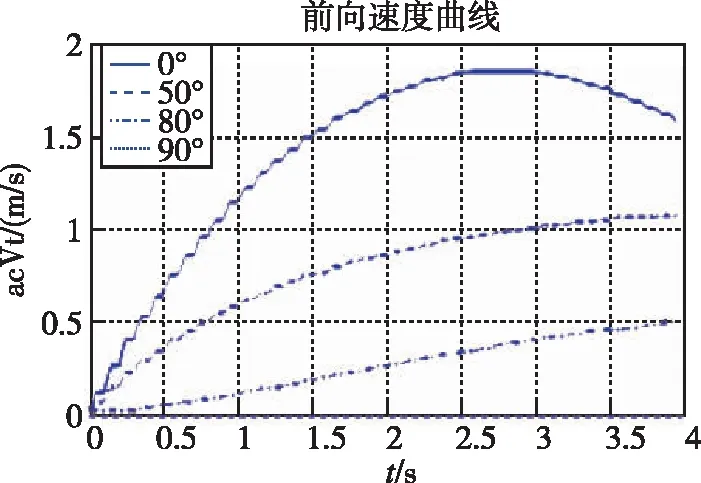
(a) 總距到Vx操縱響應
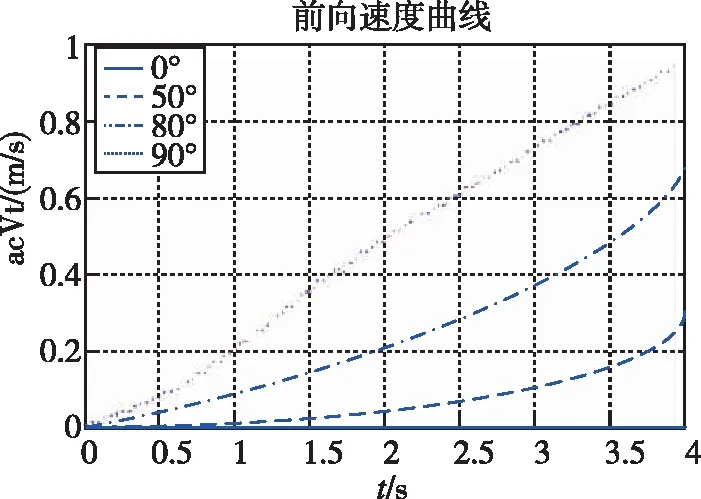
(b) 縱距到Vx操縱響應
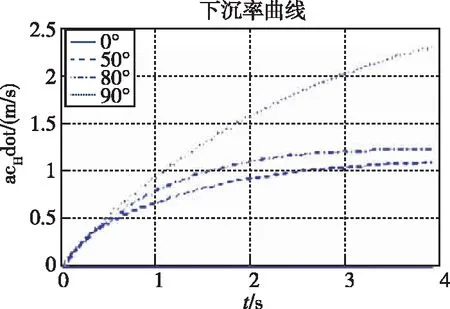
(c) 總距到Vy操縱響應
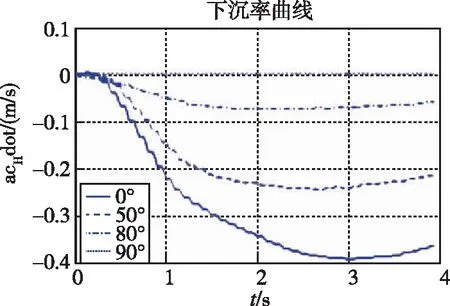
(d) 升降舵到Vy操縱響應圖2 過渡過程操縱響應曲線Fig.2 Transition process control response curves
綜上所述,傾轉過渡過程中,旋翼與氣動舵面在縱垂向的操縱能力會隨著短艙角的變化而變化。對于前向速度通道而言,直升機與混合模式操縱段以縱向周期變距影響為主,飛機模式操縱段以總距影響為主。對于高度通道而言,直升機與混合模式操縱段以總距影響為主,飛機模式操縱段升降舵與總距均有一定影響,但是總距對高度的操縱能力會隨著短艙角的減小而逐漸消失。
2 加速過渡策略設計
2.1 標稱軌跡設計
本文的研究目標是在保持高度不變的前提下,控制對象能平穩快速地跟蹤預先設計的速度軌跡,確保無人機安全地由直升機懸停模態快速過渡至固定翼前飛模態。在此過程中,前行槳葉壓縮性、發動機功率及變距限幅均限制了同一短艙傾角下飛行器的最大速度,而飛行器失速則限制了同一短艙傾角下飛行器的最小速度,因此傾轉旋翼機必須飛行在一定的短艙傾角-速度范圍內,這個安全范圍稱為過渡走廊。
在加速傾轉初期,主要由旋翼變距提供前向加速度,因此需要通過選取合適的速度以減小旋翼變距出舵量,從而保證足夠的控制余量。在加速傾轉后期,傾轉旋翼機類似于常規固定翼,需要選取合適的速度以保證安全飛行迎角,從而避免失速。綜合以上兩點即可在過渡走廊中設計一條最優過渡軌跡,稱為標稱軌跡。為了方便工程化實現,本文選取加速傾轉過程中的幾個特征工作點并進行配平。配平值作為前饋量加入控制回路中,以增加快速性。由于加速過渡過程中,前飛速度可能受到大氣環境的影響而出現波動,因此本文設計短艙開環的傾轉策略。在確保短艙傾角單調變化的前提下,以短艙角度為自變量線性插值出傾轉全過程的控制前饋量,線性近似出的前饋量與實際配平值之間的誤差可以視為干擾,并由控制回路調節。
加速傾轉過程中,旋翼拉力垂向分量由于短艙前傾而不斷減小,而機翼氣動升力由于速度增大而不斷增大,但兩者的合力變化可忽略不計,不同短艙傾角下的旋翼拉力垂向分量和機翼升力在飛行器總升力的占比如圖3所示。
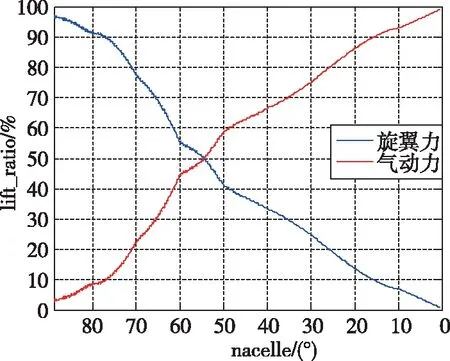
圖3 機翼升力和旋翼拉力垂向分力占比曲線Fig.3 Vertical component ratio of wing lift and rotor pull
因此,本文依據傾轉各階段的氣動特性和操縱特性分別設計各通道控制律,分段的自變量選取為過渡過程中絕對單調的短艙傾角而不是速度,對象飛行器的分段如表2所示。
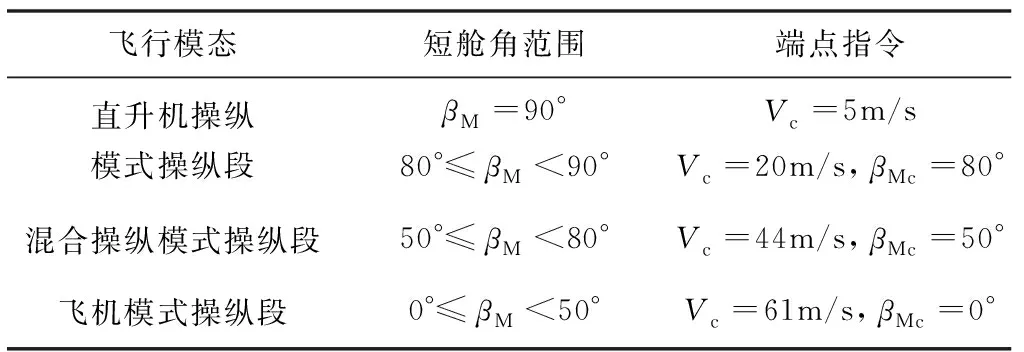
表2 傾轉過渡過程分段表
2.2 舵面混控系統設計
對象無人機的發動機功率充裕,且可以根據旋翼轉速偏差自行調整輸出扭矩,故本文不考慮發動機控制;為了減少不可控因素,襟翼在整個過渡過程均保持固定角度,因此對象無人機的縱垂向可控舵面包括總距、縱向周期變距和升降舵。對象無人機的直升機操縱段和混合操縱段的舵面分配如表3所示。
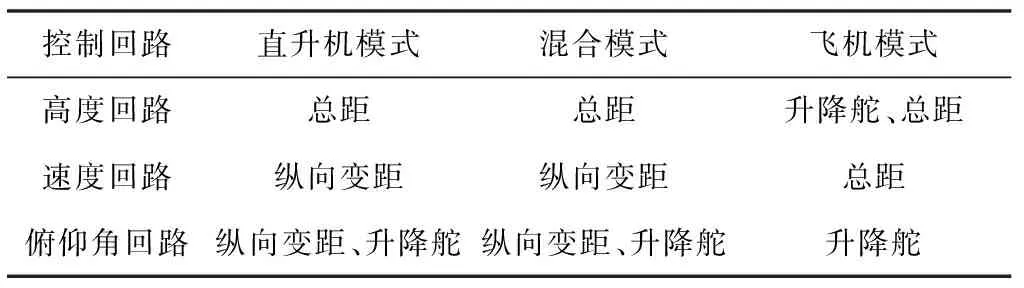
表3 傾轉過渡各段操縱分配表
由于直升機操縱段時對象無人機的前向速度較低,大氣環境對于空速的影響較大,無法獲取準確的空速信息,故該段采用地速控制回路。此段升降舵的偏轉基本上不影響飛行器飛行狀態,為避免升降舵在較大速度時突然接入控制帶來的擾動,故在直升機模式操縱段即接入升降舵姿態增穩控制。隨著飛行器逐漸加速至混合操縱模式,速度信息源切換至空速,升降舵舵效增強,此時升降舵不接高度控制外環,以降低縱垂向耦合,且旋翼變距仍有充足的控制裕度,故升降舵仍保持姿態增穩回路控制,從而簡化過渡過程的控制結構。因此,兩段的氣動特性雖然不同,需要分段設計特征參數,但舵面分配和控制律設計保持一致。
飛機模式操縱段飛行器的升力主要由機翼升力組成,周期變距對于俯仰通道的控制效果明顯弱于升降舵,且旋翼拉力在前向的分力已明顯增強,總距足以調節飛行器的飛行軌跡。考慮到飛機模式操縱段相較于直升機懸停/小速度模態和固定翼巡航模態,其本身就處于準平衡狀態,非線性特性強,縱垂向耦合嚴重,故操縱分配時考慮由升降舵完全取代縱向周期變距。
升降舵通過改變飛行器的俯仰力矩并間接引起姿態變化,進而引起氣動升力變化,從而實現對高度軌跡的控制,因此存在滯后特性,故其控制能力隨著速度的提高而增強;而總距是直接力控制,總距通道的控制效果較好,其對于高度的控制能力主要受短艙傾角和飛行速度的影響而逐漸減弱。故隨著旋翼變距的退出,由總距輔助升降舵逐漸接管高度的控制。
3 原控制策略分析
3.1 原控制結構
由2.2節分析可知,雖然直升機模式操縱段到混合模式操縱段的升力來源已經明顯過渡,但兼顧過渡安全和結構簡化后,兩段的控制結構保持統一,即以旋翼舵面控制為主,氣動舵面僅接通姿態內環為輔。直升機模式和混合模式操縱段縱垂向控制律如式(1)所示。
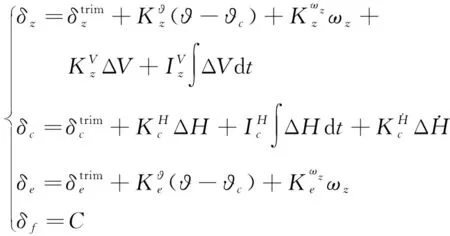
(1)
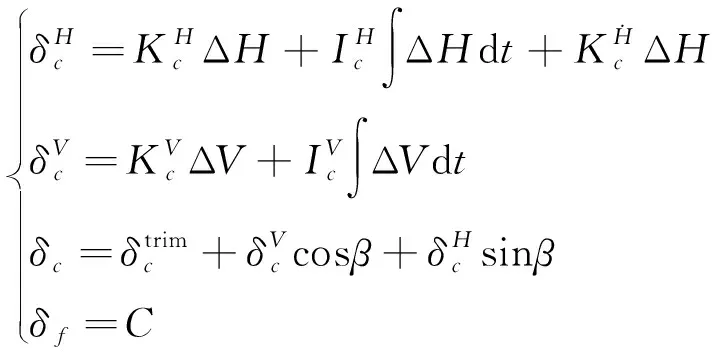
相較于直升機與混合模式操縱段,飛機模式操縱段控制結構存在一定的差異。從旋翼操縱舵面來看,總距通道由高度控制切換為速度控制,縱向變距由于操縱能力不足,退出速度控制通道。從氣動操縱舵面來看,升降舵接入高度控制回路,變為高度的主控通道。具體控制律結構如式(2)所示。
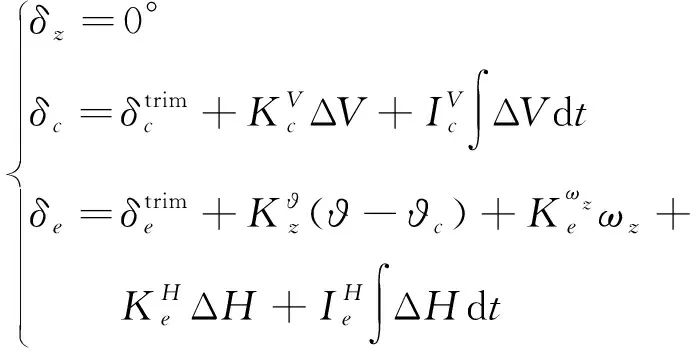
(2)
3.2 魯棒性仿真
為了驗證控制策略設計的有效性和飛機模式操縱段的飛行控制效果,考察舵面切換對于速度與高度控制的影響,設計仿真驗證方案如表4所示。
表4 飛機模式操縱段仿真條件
圖4給出了極限干擾偏差情況下飛機模式操縱段縱向仿真曲線,分析仿真曲線,可得如下結論:
1)極限干擾偏差情況下,可以看出,速度控制偏差保持在±3m/s內,空速基本能夠保持對指令的跟蹤性能。其中順逆風干擾對空速影響最大,速度偏差幅值可達4m/s,但由于總距速度控制回路的作用,曲線變化逐漸平緩。
2)飛機模式操縱段高度控制效果不理想。主要是因為過渡過程中旋翼拉力在速度方向的分量不僅容易引起速度的變化,其垂向分量也會對高度軌跡造成影響。當采用總距角調節飛行速度時,旋翼拉力在垂向的分量對無人機的高度軌跡造成干擾。但是升降舵通道的軌跡響應滯后特性將導致高度偏差逐漸增加。
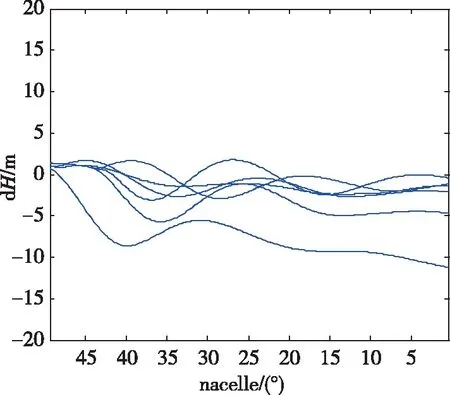
(a) 高度差值曲線
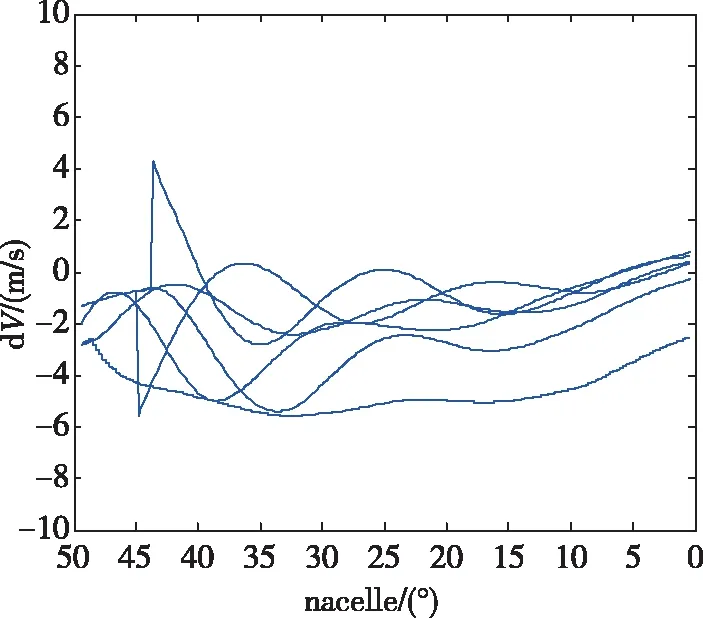
(b) 速度差值曲線
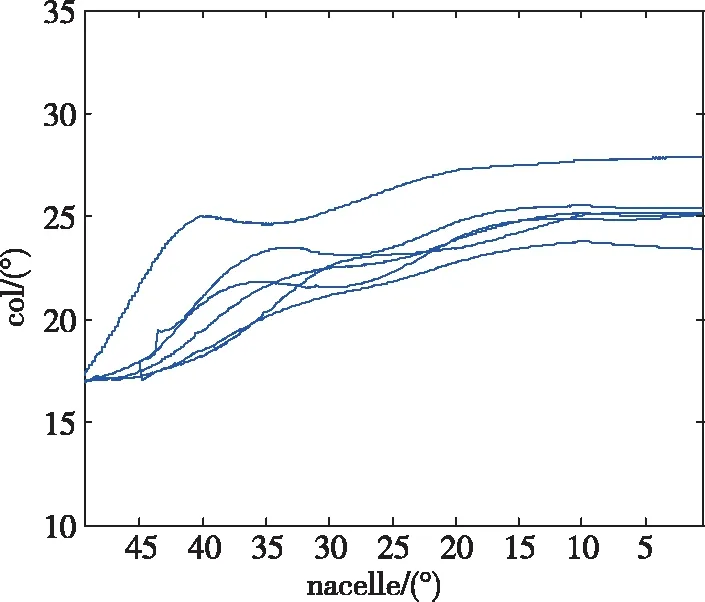
(c)總距變化曲線
(d)升降舵變化曲線圖4 飛機模式操縱段魯棒性仿真曲線Fig.4 Robustness simulation curve of aircraft mode control section
因此,有必要對飛機模式操縱段控制策略進行改進,以降低縱垂向的耦合,在保證速度控制精度的前提下,盡可能改善高度控制性能。
4 飛機模式操縱段控制策略研究
4.1 總距通道控制結構改進
飛機模式操縱段的非線性特性嚴重且縱垂向耦合最為明顯,因此設計了獨特的操縱分配方法:總距通道以余弦分配的方式主控速度,輔控高度,縱向周期變距以指數函數退出控制,而升降舵在姿態增穩內回路的基礎上接通高度控制外環。
總距通道由于是直接力控制,在飛機模式操縱段的短艙傾角范圍內,其對高度和速度均有足夠的控制能力,同時也引起了縱垂向控制耦合。因此,本段選用過渡過程天然存在的余弦函數關系,總距通道的高度控制結構參考直升機懸停/小速度段的高度阻尼回路,速度控制結構采用由固定翼巡航模式設計的PI速度控制,過渡過程中總距高度控制分量和總距速度控制分量參照具有物理意義的余弦函數的權重進行分配,具體控制律如式(3)所示。
(3)
4.2 控制原理
文獻[16]對于過渡過程的受力分解到氣流系有
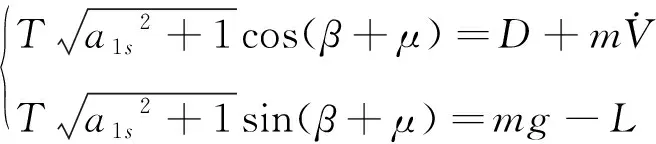
(4)

當無人機處于飛機模式操縱段時,短艙角∈(50°,0°),縱向速度在44m/s~61m/s內,旋翼逐漸轉換為螺旋槳特性,為突出主要矛盾,忽略旋翼揮舞的影響,可以得到式(5)
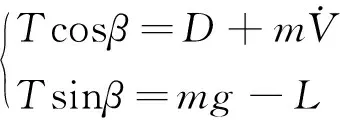
(5)
從式(5)可以看出,過渡過程中,旋翼拉力在縱垂向的分量與短艙角有著天然的三角函數關系,而飛機模式操縱段的縱垂向耦合程度也與旋翼軸的傾轉有關。因此,可以對總距通道的速度控制分量與高度控制分量按照一定權重系數進行分配,權重系數由短艙角的余弦值確定。
4.3 魯棒性仿真
本節選擇3.2節中的仿真條件進行驗證,其仿真曲線如圖5所示。
相較于3.1節的控制策略,本節提出的基于總距的余弦分配的改進控制策略在仿真曲線上表現得更加平滑,其中速度控制偏差接近于0m/s,高度控制偏差僅為±2m。
4.4 多操控分配策略的控制指標對比
鑒于本文是與實際項目緊密結合的,項目要求在傾轉實飛實驗中,對象無人機的高度偏差應保持在5m范圍內,否則需要人工遙調干預。由3.2節的魯棒性仿真可知,等效總距舵面干擾對高度的影響最大,因此本節選擇對象無人機可容忍的最大等效總距干擾作為量化指標,對比一次函數、二次函數和余弦分配的操縱分配策略的魯棒性,如表5所示。
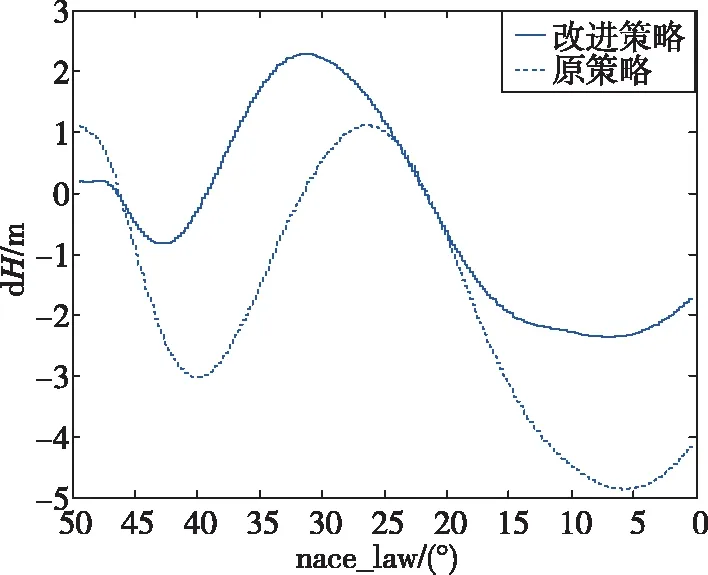
(a) 風擾動下高度差值曲線
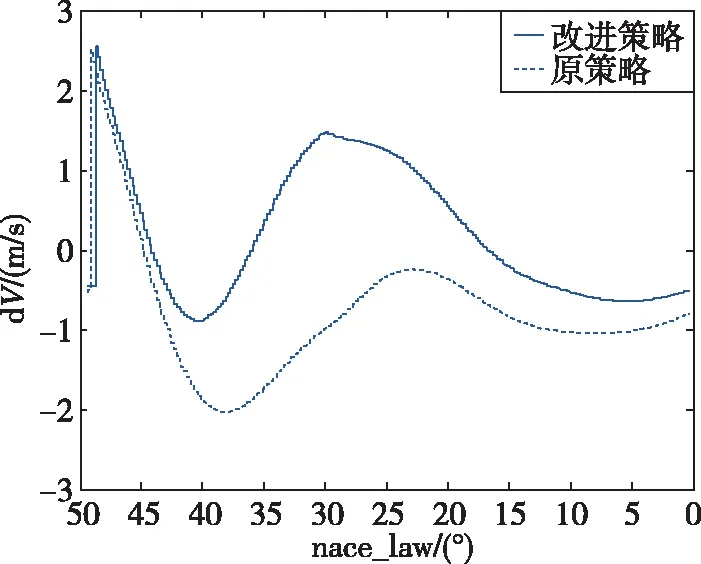
(b) 風擾動下速度差值曲線

(c) 舵面擾動下高度差值曲線
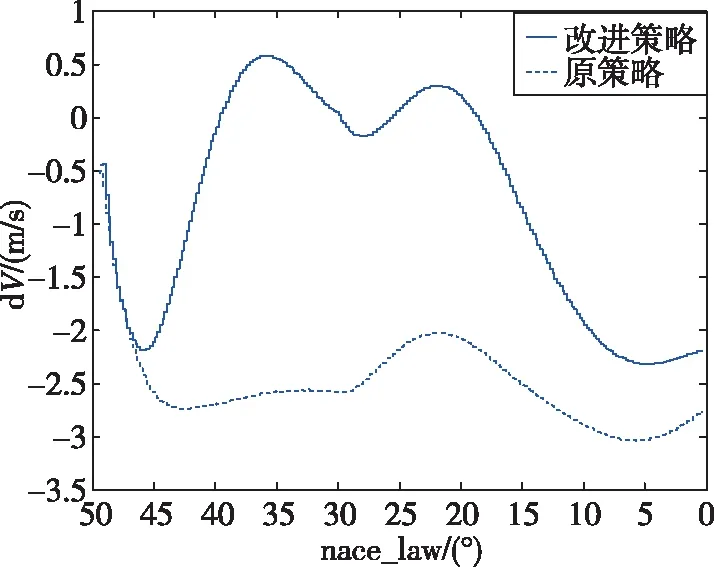
(d) 舵面擾動下速度差值曲線圖5 飛機模式操縱段魯棒性對比曲線Fig.5 Robustness comparison curves of aircraft mode control section

表5 不同操縱分配策略的關鍵量化指標
對象無人機的總距最大行程為10°,由于機械和安裝誤差等原因,總距誤差不大于1°,考慮到實飛環境等不確定性,對象無人機的最大可容忍的等效總距干擾應大于1.5°。由表5可見,僅余弦分配策略滿足需求。
5 結論
本文聚焦于橫列式雙傾轉旋翼機平飛過渡的操縱分配等縱向控制問題,從經典控制理論出發,分段設計了舵面混控系統和縱向控制結構,并借助魯棒性仿真驗證了縱距余弦分配的有效性,具體研究成果包括:
1)從飛行器氣動特性和操縱特性角度出發,將加速過渡過程細化為三個階段,簡化了標稱軌跡的工程化實現。
2)從經典PID控制理論出發,根據各段的特點設計了各段控制律,并結合魯棒性仿真,揭示了常規過渡控制的短板。
3)針對過渡過程的操縱分配問題,從控制機理和仿真對比兩個角度,分析了總距余弦分配的優越性。