光纖環非互易相位誤差尾纖補償方法研究
2022-08-05 02:34:40吳雨萌畢聰志孫桂林
導航定位與授時 2022年4期
吳雨萌,胡 斌,畢聰志,孫桂林,雷 明
(北京自動化控制設備研究所,北京 100074)
0 引言
光纖陀螺是一種基于Sagnac效應的慣性測量組合的核心部件,由于具備無機械運動部件、成本低、壽命長等優點,在諸多領域有著廣泛的應用前景。光纖環作為光纖陀螺的核心部件,極易受外部環境的影響,其中,外界溫度環境的變化是制約光纖環性能提升和光纖陀螺工程化的主要原因之一,外部溫度環境的變化會直接導致光纖陀螺的零位漂移,簡稱零漂。
零位漂移是衡量光纖陀螺全溫性能的重要指標之一,用于評價變溫條件下陀螺輸出信號平均值的峰-峰值大小。對于光纖環來說,該值越小代表光纖環的溫度性能越好。為了改善光纖環溫度性能,可以通過合理的熱設計來減少外界溫度環境對光纖環的影響,還可以通過改變光纖環繞法如增加極數等來減少不對稱性帶來的非互易相位誤差。目前,國內外眾多學者已通過改進光纖陀螺結構熱設計減少環圈溫度梯度,以及通過增加光纖環繞制極數的方式減少光纖環的熱致非互易相位誤差。此外,近年來,也有學者對于光纖環不對稱與光纖環溫度特性的關系進行了研究。但光纖環繞制技術復雜,繞制過程難以保證光纖環的完美對稱,尤其是纏繞張力波動對內部應力分布影響較大。在不同溫度下,應力也會隨之發生變化,并且不同光纖陀螺儀的熱源分布也不同,因此同一環圈在不同的熱源分布條件下產生的熱致誤差也不相同,這種誤差的大小直接影響光纖陀螺的溫度性能以及在慣導系統中的應用精度。如何減少光纖環不對稱導致的熱致誤差一直是國內外研究的重點,也是工程應用中的難點。
本文針對光纖環繞制過程中順逆時針光路不對稱帶來的非互易相位誤差問題,結合實際工程應用需求,在特定設計的光纖環安裝結構中,建立光纖環的熱互易性仿真模型,計算光纖環尾纖長度非對稱對熱致誤差的影響,并通過變溫條件下光纖環溫度特性測試完成結果驗證,最終得到調整光纖環尾纖長度補償光纖環非互易相位誤差的方法,以提升光纖環實際應用精度和一致性。
1 理論分析
1.1 光纖環熱致誤差機理
光纖環中不對稱的光纖點上有溫度擾動時,在環圈中相向傳播的兩束光將會在不同時間經過這一段光纖,從而產生非互易相移,即Shupe誤差。
光纖環的熱致非互易相位誤差為

(1)
其中,=2π為光在真空中的傳播常數;為光在光纖中的傳播速度。
將式(1)分為兩部分積分:(0,2)和(2,),則可以得到

(2)
式(2)表明,在結構和材料相同的條件下,光纖環上的溫度分布、中點左右兩側相同長度位置處光纖的距離,以及起繞點兩側順逆時針方向光纖長度的差值,均會影響光纖環的熱致非互易相位誤差。
1.2 光纖環非互易性的原因及補償原理
目前,光纖環繞制過程中采用了兩種方式降低Shupe效應的影響,一是采用對稱繞法使得光纖環中點兩側相同長度位置處光纖的距離盡量靠近,從而使得中點兩側光纖受到同樣的溫度擾動,抵消溫度變化引起的誤差,在四極對稱繞法的基礎上,拓展出了八極和十六極繞法、crossover-free 繞法等,以抵消光纖環相鄰兩個相反方向繞制周期內的相位誤差;二是穩定光纖環的纏繞過程,重點是減少張力波動和人為干預,提升光纖環內部的應力穩定性。
由式(1)可知,在光纖環溫度條件相同的情況下,影響光纖環熱致非互易誤差的因素主要在于溫度變化導致的光纖長度和光纖折射率的變化。除光纖排布方式外,影響光纖陀螺熱致非互易誤差的因素還包括:環圈繞制過程中光纖扭曲引起的扭曲應力、環圈膠體固化過程中產生的累積應力,以及光纖環中點不對稱導致的順逆時針方向光纖長度不對稱等。這些因素都會直接導致順逆時針兩束光波傳輸特性發生變化,從而引起光纖陀螺儀相位差的變化。
此外,式(2)描述的是光纖環在理想對稱條件下的熱致非互易誤差,而光纖環在實際繞制過程中并不能保證嚴格的對稱性。實際繞制光纖線圈時,光纖存在中點偏差、光纖直徑引起的每層長度不同以及纏繞工藝產生的光纖躍層越匝區等因素,都會導致對稱繞法存在非理想性,因此式(2)無法反映中點偏差、光纖直徑等因素產生的附加熱致非互易相位誤差。
假設光纖環中點偏差為Δ,則根據式(2),相對于中點無偏差的光纖環,有中點偏差Δ的光纖環上處實際處于(+Δ)處,因此式(2)變為式(3)
)](2-+2Δ)d
(3)
式(3)表明,光纖環中點偏差或順逆時針方向光纖長度的差值會改變光纖環的熱致非互易誤差。因此,可以通過調整光纖環順逆時針方向光纖的長度,以補償光纖環中點不對稱、光纖扭轉的扭曲應力和膠體固化累積應力等導致的光纖環熱致非互易誤差。
以上所述各種影響光纖環熱致非互易誤差的因素難以通過理論分析進行定量的研究和計算,因此本文建立光纖環有限元模型,并利用其計算通過截短或延長光纖環不同方向尾纖長度的方式,從而減少因光纖環不對稱性導致的非互易相位誤差。
2 光纖環仿真分析模型的建立
本文應用的光纖環仿真分析模型為二維固化膠體等效介質模型,光纖環結構參數和仿真模型參數如表1和表2所示。光纖環結構采用交錯排布、四極對稱繞制方式,共計44層、72匝,環圈內徑84mm。仿真分析模型采用二維固化膠體等效介質模型,其中等效介質模型根據等效介質理論計算交錯排布方式下光纖環各組分體積分數,得出光纖環等效密度、等效比熱容和熱傳導系數。
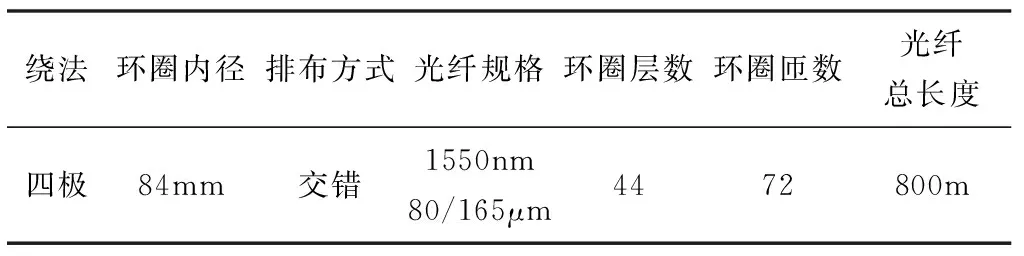
表1 光纖環結構參數
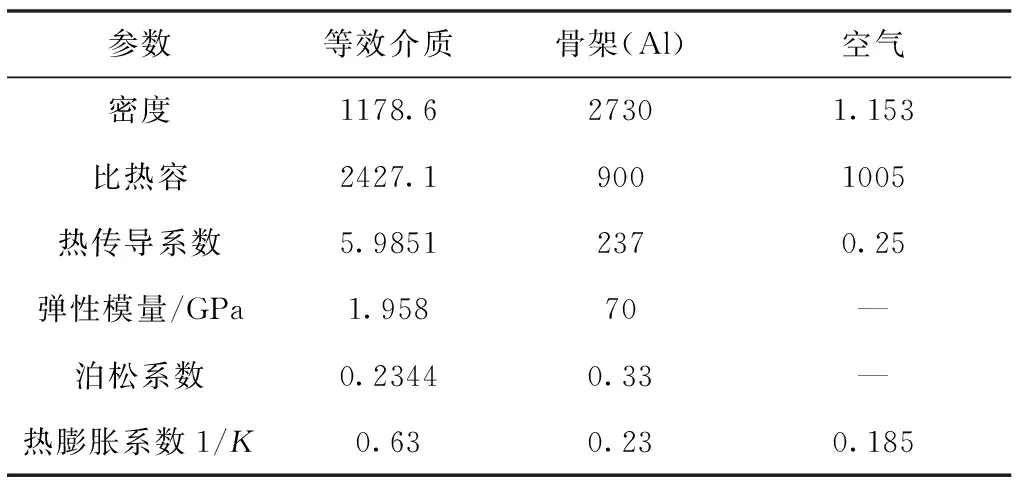
表2 等效介質模型參數
根據實際應用情況,光纖環的溫度變化主要來自于空氣熱對流以及環槽材料熱傳導,因此根據光纖環熱場環境建立熱傳導介質(環槽)和熱對流介質(空氣),并通過二維軸對稱旋轉方式建立光纖環仿真分析模型,環圈周向二維截面如圖1所示。 利用Comsol多物理場仿真分析軟件,計算出特定溫度環境條件下光纖環上各位置處的溫度分布場,并將光纖上各點的溫度代入離散的光纖環數值模型,具體流程如圖2所示,計算得到因光纖環圈變化產生的光纖陀螺儀零位漂移。
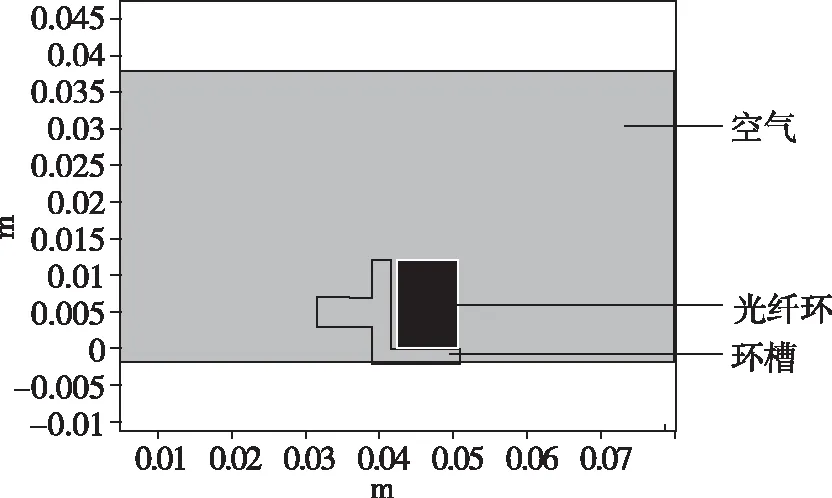
圖1 等效模型的二維截面示意圖Fig.1 Two dimensional cross section diagram of equivalent model

圖2 光纖環仿真分析模型結構Fig.2 Fiber coil simulation analysis model structure
在對尾纖補償以消除環圈繞制不對稱性的仿真分析過程中,光纖環的中點不對稱性通過改變環圈第1、2層順逆時針層數與匝數,并保證環圈層數、匝數的完整對稱性來實現;光纖環順逆時針方向光纖長度的延長或縮短,可以通過增加或減少環圈外側光纖層數或匝數的方式來實現。
3 仿真分析與實驗驗證
3.1 仿真結果分析
通過上述仿真分析模型,驗證了光纖環中點不對稱和順逆時針方向光纖長度不相等條件下,光纖環輸出的熱致非互易相位誤差。根據上述仿真分析模型建立的光纖環體總長度約為800m,圖3所示為仿真分析過程中光纖環加載的溫度條件,也是目前光纖陀螺領域通用的應用溫度環境。在圖3所示溫度環境條件下,光纖環在-40℃保溫2h后,環圈內部達到熱平衡,然后以1℃/min的溫變速率升溫至+60℃;在+60℃保溫2h后,以-1℃/min的溫變速率降溫至-40℃,并保溫2h,完成1個完整的高低溫循環過程。

圖3 光纖環加載的溫度環境Fig.3 Temperature conditions of fiber coil
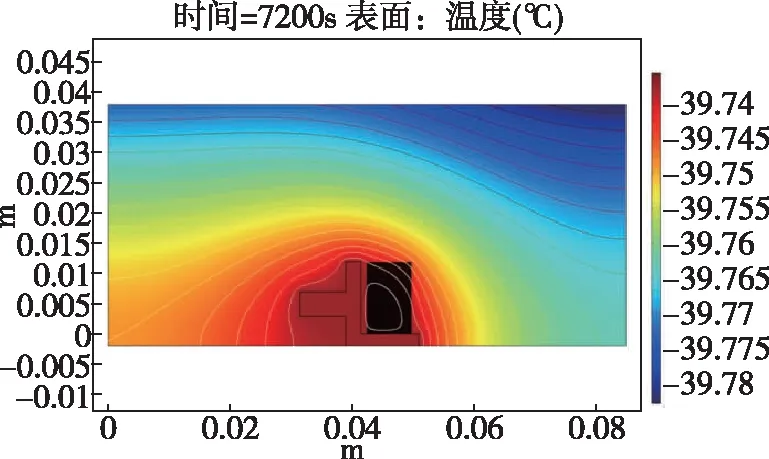
圖4 溫度加載2h時的溫度分布Fig.4 Temperature distribution under temperature load for 2h
對光纖環模型進行溫度加載,通過熱仿真瞬態分析可以得到各時刻光纖環模型的溫度分布情況。圖4所示為溫度加載2h,即-40℃時光纖環模型的溫度分布。由圖4可知,當溫度降為-40℃并穩定一段時間后,光纖環模型中溫度梯度分布情況為光纖環內層溫度略高于外層溫度。圖5所示為溫度加載5.5h,即+60℃時光纖環模型的溫度分布圖。由圖5可以看出,當光纖環模型在溫度為+60℃的環境中穩定一段時間后,光纖環內層溫度要略高于外層溫度。
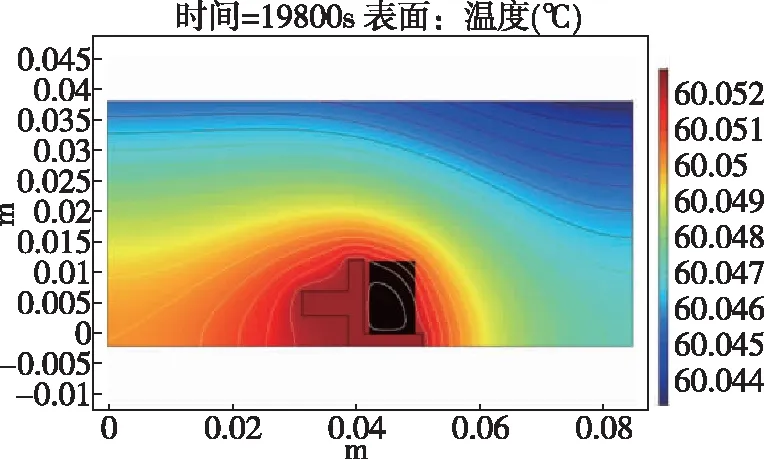
圖5 溫度加載5.5h時的溫度分布Fig.5 Temperature distribution under temperature load for 5.5h
將各時刻光纖環模型上各離散點的溫度代入熱致非互易誤差公式中,即可計算出光纖環的熱致非互易誤差,并繪制出在圖3所示的溫度下光纖環熱致非互易誤差曲線。
在物理上順逆時針方向光纖長度相等的模型下,將四極對稱的光纖環在順時針方向上截去約0.52m,約2匝光纖,截長前后,光纖環順逆時針方向的相位差變化如圖6所示。從圖6中可以看到,尾纖補償前物理上順逆時針方向光纖長度相等的模型并不是最優的,順時針方向的尾纖截長0.52m后,光纖環的熱致非互易誤差減小。這是由于光程中心與物理上的光纖不重合導致的。因此,需要通過截尾纖來優化光纖環的性能。由圖6可知,順時針方向上截去約0.52m時,截長后環圈熱致非互易相位誤差的極差減小為原來的43%。

圖6 溫度變化率為1℃/min時的熱致非互易誤差Fig.6 Thermally induced nonreciprocal error when temperature rate is 1℃/min
為驗證尾纖補償后,即順時針方向尾纖截長0.52m時,光纖環在不同變溫速率下熱致非互易誤差變化是否滿足同樣的規律,在-40℃~+60℃范圍內對3℃/min變溫速率條件進行了仿真分析。圖7所示為3℃/min變溫速率下,光纖環完整對稱和順時針方向截長0.52m時的熱致非互易相位誤差,尾纖調整前后環圈不對稱導致的非互易相位誤差極差降低至調整前的41%。
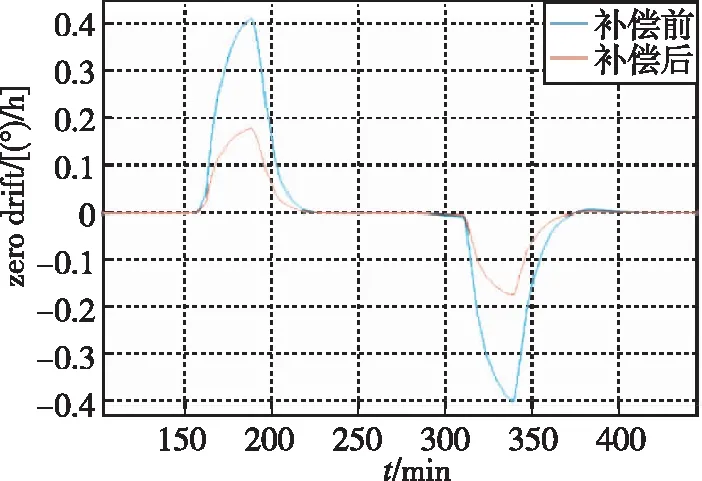
圖7 溫度變化率為3℃/min時的熱致非互易誤差Fig.7 Thermally induced nonreciprocal error when temperature rate is 3℃/min
通過以上仿真分析可見,物理結構上完美對稱的光纖環不是熱致誤差最小的狀態,通過調整順逆時針方向的光纖長度可以減小環圈的熱致非互易相位誤差。對于表1和表2所示結構和材料的光纖環來說,在-40℃~+60℃溫度范圍和1℃/min以及3℃/min的溫變速率條件下,光纖環尾纖長度變化0.52m,可將全溫范圍內的熱致非互易相位誤差極差降低至原來的41%。
以上理論及仿真分析均說明,光纖環物理長度的中點不一定是光纖環的光學中點,存在通過調整光纖環環體外尾纖長度以提高光纖環對稱性的可能。但是,光纖環中光纖和固定膠應力分布復雜,難以確定縮短或延長的光纖方向,更加難以定量描述縮短或延長的光纖長短。因此,針對設計及工藝定型的光纖環,需要結合仿真分析結果和實驗結果,確定光纖環尾纖截長或延長的方向和長度。
3.2 實驗結果分析
選用與以上仿真分析結構相同的1#和2#光纖環,進行改變光纖環尾纖長度不對稱性以降低光纖陀螺全溫零偏的實驗。其中,光纖環1#為正常繞制的光纖環,光纖環2#為繞制時出現一些問題的故障環。
實驗過程中,為了排除光源、耦合器、Y波導、探測器和數字處理電路對光纖陀螺儀全溫零位漂移的影響,圖8實線框中的光學器件和電路的配套及裝配狀態在光纖環順逆時針尾纖調整過程中均保持不變。
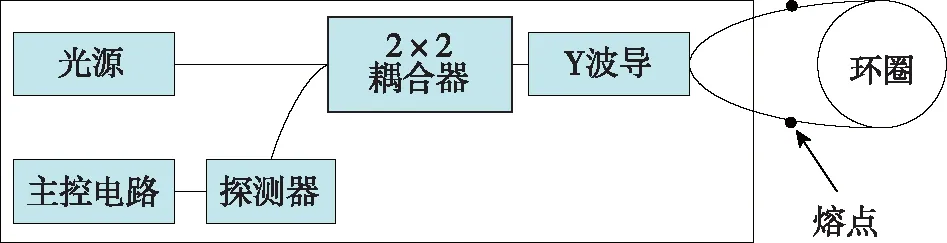
圖8 實驗光路Fig.8 Experimental light path
表3所示為實驗光纖環1#和2#尾纖調整前后相應的光纖陀螺儀全溫零位漂移值。

表3 光纖環實驗參數及測試結果
圖9所示為光纖環1#在1℃/min的溫變速率下,順時針方向尾纖截長約0.46m時,光纖陀螺儀輸出零位隨溫度變化的曲線,尾纖調整前后陀螺儀全溫零位漂移值由1.48(°)/h減小為0.87(°)/h。
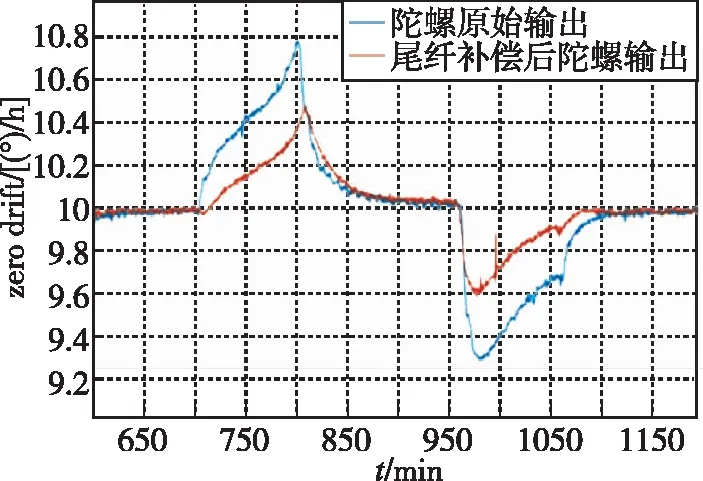
圖9 光纖環1#原始輸出與逆時針尾纖截去0.5m后陀螺輸出曲線Fig.9 Original gyro output and the output after removal of 0.5m fiber in anticlockwise fiber coil
圖10所示為將光纖環2#順時針方向尾纖減少約1.38m時,在一個完整的溫度循環內陀螺儀零位漂移值。尾纖調整前后,陀螺儀全溫零位漂移值由原來的5.84(°)/h減小為2.30(°)/h。

圖10 陀螺2#原始輸出與逆時針尾纖截去1.5m后陀螺輸出曲線Fig.10 Original gyro output and the output after removal of 1.5m fiber in anticlockwise fiber coil
將2個實驗環圈配套光纖陀螺儀在3(°)/min溫變速率下進行測試,實驗結果顯示,光纖環1#順時針尾纖截長0.46m時,對應陀螺儀全溫零偏漂移值由3.32(°)/h減小為1.49(°)/h ; 光纖環2#順時針方向尾纖截長1.38 m時,陀螺儀全溫零偏漂移值由7.17(°)/h減小為1.37(°)/h,如圖11(a)和(b)所示,其中圖11(b)輸出異常的點是由于測量過程中溫度受到了一次擾動造成的。
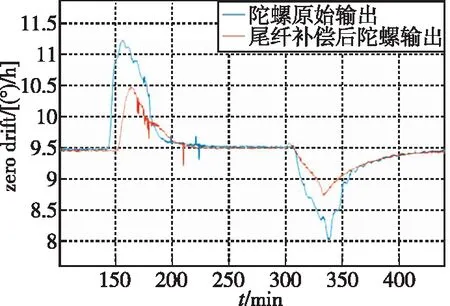
(a) 1#,順時針截長0.46m
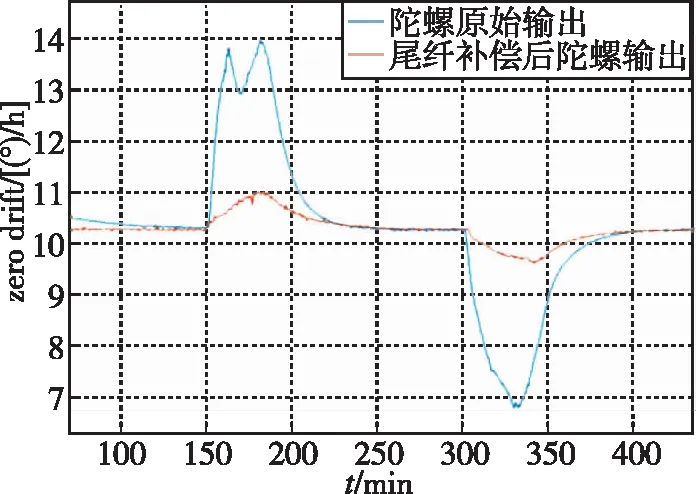
(b) 2#,順時針截長1.38m圖11 實驗陀螺儀配套光纖環順逆時針尾纖不等時陀螺儀全溫零位漂移Fig.11 Gyroscope full temperature zero drifts for different length of test tail fiber
通過實驗分析,光纖環的零偏漂移偏差可以通過截取光纖環尾纖長度的方式來改善。在實際應用中,針對如1#環圈所示的全溫零偏漂移增大的情況,可以在實際生產中,通過將順逆時針光纖延長或縮短固定長度后,通過有限元仿真分析尾纖截長方向并通過試驗結果擬合曲線,尋找最適合長度,從而將光纖陀螺全溫零偏漂移降低至最小,以提升光纖環溫度性能。針對如2#環圈所示零偏漂移異常增大的情況,可以通過截取尾纖的方式進行補償,通過調整尾纖長度,盡可能抵消掉光纖環繞制缺陷導致的光纖環零偏漂移異常的現象。
4 結論
本文根據等效介質理論和Mohr理論,建立了光纖環熱致相位誤差仿真分析模型,并利用該模型分析了不同溫度環境條件下,光纖環熱致非互易誤差與光纖環尾纖長度的關系。文章的結論與不足之處如下:
1)根據光纖環順逆時針方向光纖長度存在差值時陀螺儀全溫零位漂移的變化量,得出了補償光纖環光程中點偏差的方法及規律。
2)相較于靠實驗摸索改變尾纖長度的方法,有限元仿真不僅能夠確定截取尾纖的方向,也能得出尾纖長度與光纖環全溫零偏漂移的關系,為后續光纖環的全溫零位漂移補償提供了參考。
3)本文的仿真及實驗只將零偏漂移曲線的極差作為評判標準,未說明這種方法對陀螺噪聲等其他指標是否有關鍵影響,后續可以圍繞其他評判標準開展研究。