具有壓力和位置檢測功能的氣囊型觸覺傳感器
2022-08-05 06:23:42吳德宇楊達亮陳立挺葉錦華吳海彬
中國機械工程 2022年14期
關鍵詞:檢測
王 頂 吳德宇 楊達亮 陳立挺 葉錦華 吳海彬
福州大學機械工程及自動化學院,福州,350116
0 引言
觸覺傳感器是具有可感知接觸位置、壓力、紋理等功能的柔性電子器件[1],被廣泛應用于機器人仿生皮膚、人工假肢、康復醫療等領域,是人機交互過程必不可少的工具,在人機協作中發揮著越來越重要的作用[2]。
觸覺傳感器按照結構形式可以分為陣列式結構和非陣列式結構。隨著微機電系統技術的發展和納米新材料的涌現,陣列式觸覺傳感器正在向著高密集度、高靈敏度方向發展,在檢測原理上主要分為壓阻式[3]、壓電式[4]、電容式[5]等觸覺傳感器。近年來,陣列式觸覺傳感器的研究已經取得豐碩成果。周建輝等[6]通過制備AgNWS/PDMS導電復合材料,以壓阻橡膠作為敏感材料制作了高柔彈性觸覺傳感器,實現了接觸力及其分布的檢測;SONG等[7]以PVDF薄膜為敏感元件,研制了一種高精度、高速響應的織物表面紋理傳感器,并通過徑向基神經網絡對不同織物進行分類;LIU等[8]以PDMS材料制作了2×2的電容陣列觸覺傳感單元,該觸覺傳感器在不同受力方向均具有較高的靈敏度,可用于三維力的檢測。陣列式觸覺傳感器也存在結構復雜、相鄰檢測單元存在檢測盲區等問題,特別是在大面積使用時需要數量龐大的陣列單元,使得信號處理的實時性難以保證,這些缺陷限制了陣列式觸覺傳感器在機器人領域的應用。
相較于陣列式觸覺傳感器,非陣列式觸覺傳感器的相關研究和取得的成果相對較少。AVERY等[9]基于電阻抗成像技術應用鹽水從腔室排出產生的阻抗變化可以將接觸目標的質心定位在2.3~4.6 mm以內,并能推斷接觸目標的大小和硬度,但是該傳感器結構復雜,而且對圖像重建算法和硬件數據處理系統要求較高。ZHANG等[10]設計了一種導電織物,利用其導電表面的“自均勻”特性以多孔聚氨酯泡沫作為觸摸開關,制作了一款可實現位置檢測的觸覺觸感器,該觸感器利用織物的柔彈性可以貼敷于形貌相對復雜的曲面上。WU等[11]利用導電纖維的均勻導電性與差動電容電橋法,制作了一種兼具位置檢測和壓力反饋的觸覺傳感器,由于傳感器層數較多,該觸覺傳感器僅適用于平面檢測。PAN 等[12]基于電阻分壓原理制作了一種可檢測碰撞位置的觸覺傳感器,具有較好的實用性。非陣列式觸覺傳感器通常具有電極數量少、傳感器內部無需復雜引線、檢測區域內無盲區等優勢。另外,現有的觸覺傳感器,不論是陣列式還是非陣列式,都需要事先制備好樣品,然后貼敷在機器人表面,對于復雜不規則曲表面,傳感器的無縫、無褶貼合是非常困難的。
本文提出一種可以同時實現接觸位置和壓力檢測的氣囊型觸覺傳感器,該傳感器具有結構簡單、可定制匹配任意曲表面等優點。
1 氣囊型觸覺傳感器的設計原理
1.1 結構模型
本文提出的氣囊型觸覺傳感器可以針對機器人的各種曲表面直接定制。不失一般性,這里以一上臂假肢為基體,進行觸覺傳感器定制化設計。
首先,需要在假肢基體上制備非閉合的導電涂層,并在導電涂層上分時構造出兩個分布方向不同的電勢場(圖1)。在導電涂層的兩端可以各選擇2點并對角組合作為激勵電極,通過2組電極分時接入激勵,導電涂層上某點的位置與該點在兩組激勵下的電勢值具有一一對應關系。基于此,即可通過檢測該點在兩組激勵下的電勢值,獲取該點的位置坐標。

圖1 傳感器基體與導電涂層
為了實現接觸力的實時檢測,在導電涂層外用柔性導電薄膜進行包裹,并在導電薄膜與導電涂層之間充入氣體,形成氣囊,如圖2所示。氣囊所起的作用,一是使導電涂層與導電薄膜實現電氣隔離;二是當導電薄膜受接觸力作用時,氣囊發生形變,致使氣囊內氣壓發生改變,通過檢測氣壓的變化可獲取接觸力信息。
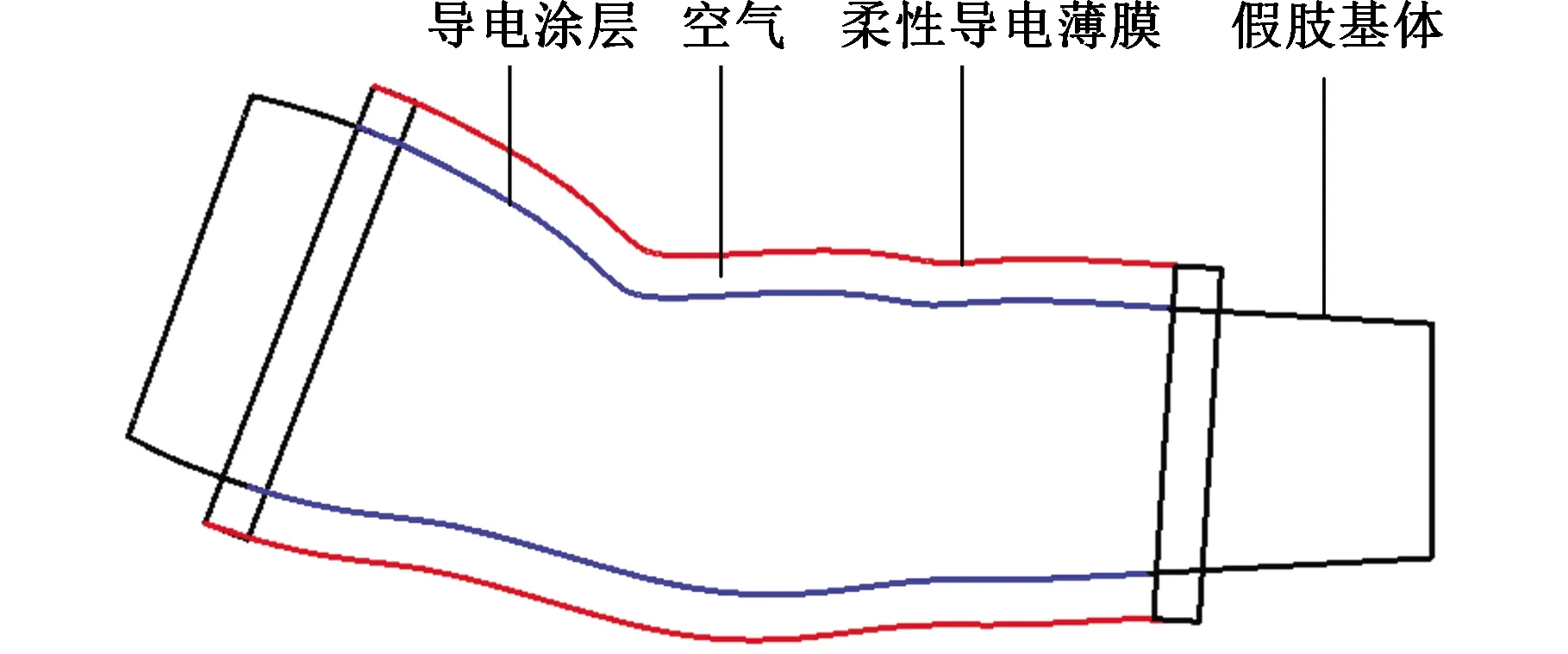
圖2 傳感器模型圖
1.2 接觸位置檢測原理
盡管假肢基體是三維結構,但其曲表面的導電涂層卻具有二維性質,其上任一點在導電涂層二維坐標與假肢基體三維坐標之間具有一一對應關系,為此只需檢測接觸點在導電涂層上的二維坐標即可。在導電涂層上,只需建立兩個不同方向的穩態電勢場,通過等勢線交點即可唯一確定其二維坐標。以圖1所示導電涂層進行物理建模與仿真。導電涂層的四個電極分別分布在四個頂點上。
在導電涂層的兩端點設置兩個點電極,若在兩個電極間施加恒定電壓,導電面內將形成靜電場。靜電場是無旋場,其物理模型可以表示為
E=-U
(1)
·D=ρv
(2)
式中,E為電場強度;為梯度算子;U為靜電勢;D為電位移矢量;ρv為自由電荷體密度。
圖1中A+與A-是構成電勢場A的電極對,B+和B-是構成電勢場B的電極對。首先對A電勢場的電極對施加偏置直流電壓激勵,此時B組電極對懸空,A電勢場產生的電勢分布如圖3a所示。接著用相同大小的偏置直流電壓對電勢場B施加激勵,A組電勢對懸空,B電勢場電勢分布如圖3b所示。在兩個分時電勢場的作用下,某一點在兩個電勢場的作用下,對應兩條等勢線,通過檢測該點在兩條等勢線的電壓值(φA,φB)(φA是電勢場A在相交點的電勢值,φB是電勢場B在相交點的電勢值),進而可以唯一確定該點的二維坐標,如圖3c所示。曲表面上任意一點都可以用電勢對(φA,φB)來表示。所以建立位置與電勢對的映射關系就可以求解出該點的位置坐標。于是有
(φA,φB)=f(mx,ny)
(3)
其中,mx和ny表示曲表面任一點的二維位置坐標。但是從圖3a和圖3b的電勢分布可以看出:每個電勢場在曲表面上產生的電勢分布都是非線性的,并且很不均勻,也沒有精確的理論模型來描述二維位置坐標與電勢對的對應關系。這里擬采用函數逼近的方法,利用神經網絡工具對非線性電勢分布進行擬合。

(a)A電勢場電勢分布 (b)B電勢場電勢分布
1.3 接觸壓力檢測原理
密閉氣體受壓時,其內部氣壓會隨外部壓力的變化而變化,基于此,可以實現接觸壓力檢測。假設密閉氣體滿足理想氣體方程:
(p0+pa)V0=nRT
(4)
式中,p0為初始狀態下的相對壓力;pa為大氣壓力;V0為初始狀態下氣囊的空腔體積;n為氣體物質的量;R為理想狀態下氣體的普適常量;T為理想氣體的溫度。
這里假設R和T保持不變,觸覺傳感器的氣囊是密閉的,所以n也保持不變。假設氣體流動是靜態的,當氣囊表面受力,空腔體積改變ΔV時,由玻意耳定律可以建立如下方程:
(5)
式中,pΔV為變化后的相對壓力。
氣囊在外部載荷作用下的計算公式[13]為
F=pSe
(6)
式中,F為氣囊受到的外部載荷;p為囊內氣體的相對壓力;Se為壓力的有效作用面積。
將式(6)代入式(5)可以得到氣囊在外力壓縮過程中計算公式:
(7)
由式(7)和式(5)可知,隨著外部載荷F的增大,ΔV也隨之增大,氣囊內氣體的壓力也隨之增大。在本研究中利用BOSCH公司生產的BMP180微型氣壓傳感器測量不同載荷作用下內部相對壓力的變化值。
2 徑向基神經網絡重構電勢分布
2.1 徑向基神經網絡
采用徑向基(radial basis function,RBF)神經網絡算法對電勢分布進行重構,用于建立輸入電勢對和接觸位置之間的映射關系。
RBF神經網絡是一種三層前向網絡,分別是輸入層、隱含層和輸出層,從輸入層到隱含層空間的變換是非線性的,而從隱含層到輸出層空間的變換是線性的[14]。在MATLAB中利用標準函數newrb()建立RBF神經網絡模型:
nRBF=newrb(xi,yi,er,sp,qx,add)
(8)
其中,xi是輸入量,它包括兩個變量,即測得的電勢對(φA,φB);yi是輸出量,它也包含兩個變量即曲面的二維位置信息(mx,ny);er是設置的目標輸出的均方差;sp為徑向基的膨脹速度;qx是最大的神經單元數目;add為每次計算所增加的神經元的數目。
神經網絡訓練的樣本集合分為訓練集和測試集,并且這兩個集合是互斥的,訓練集用來生成RBF神經網絡重構電勢的訓練模型,測試集用來評估模型的準確度。
2.2 二維坐標構建
由于導電涂層具有二維性質,所以只需要在假肢曲表面建立合適的二維坐標系,為了適應假肢曲表面的曲率,這里采用以曲代直的思想,將導電層的左邊線和底邊線分別作為Ny軸和Mx軸,兩個邊界的交點為零點記為(0,0),曲面上任意一點到Ny軸平行于Mx軸的曲線距離記為m,曲面上任意一點到Mx軸平行于Ny軸的曲線距離記為mx,得到曲面的二維位置信息(mx,ny),對應式(3)中的位置信息,如圖4所示。
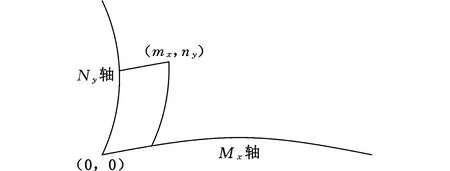
圖4 位置信息示意圖
通過建立非正交坐標系完成了導電涂層的電勢信息與二維位置信息的映射。
3 傳感器的制備與測試系統的搭建
3.1 傳感器的制備
基于圖2所示的傳感器設計原理制備傳感器樣品。傳感器實物樣品分為3層:
(1)導電層。采用噴涂的方法將導電石墨均勻地噴涂在基體表面,選用FUKKOL公司生產的導電石墨噴漆,該產品具有較低的表面電阻率。在導電涂層的四個頂點利用DJ002型導電銀漿制備電極。
(2)防護與信號引出層。該層的作用一是受壓形變時提取觸碰點的電勢信號,二是對觸覺傳感器整體起封裝和保護作用。要求該層內側面需具有導電特性、而外側面應具有絕緣特性,并具有較好的柔性,適于觸摸按壓。該層由導電布進行制備,利用化學沉淀的方法將金屬鎳轉移到聚酯纖維上,在金屬鎳表面鍍上導電性高的銅層,然后對其另一側均勻涂抹上密封膠。
(3)氣體隔離層。在基體導電涂層和防護與信號引出層之間通過氣泵充入空氣,實現兩層之間的電氣隔離。只有當防護與信號引出層某點受到觸摸按壓時,該點才可能使兩層發生接觸。實物樣品通過3D打印部分結構配件,將防護與信號引出導電布包裹在假肢基體導電涂層外側。傳感器制備過程及樣品如圖5所示。

圖5 傳感器樣品
3.2 傳感器測試系統的搭建
觸覺傳感器測試系統的工作原理如圖6所示。壓力檢測信號處理電路實現對BMP180實時氣壓的采集;位置檢測信號處理電路實現對傳感器導電層的雙路電壓切換,利用Labview軟件開發了傳感器的數據處理和顯示程序,利用ActiveX技術調用RBF神經網絡模型,將傳感器電勢矢量轉化為接觸位置矢量,實現對接觸信息的動態顯示。

圖6 信號處理系統結構框圖
4 傳感器的標定與測試
4.1 位置檢測
為了更好地擬合整個曲表面電勢與位置的映射關系,采集1460組樣本數據,每組數據包含該點的位置矢量與電勢矢量。其中位置矢量包括每個點的Ny軸坐標和Mx軸坐標,電勢矢量即為該點電勢對的電勢值。本研究將1140組樣本點作為訓練集,將320組樣本點作為測試集。

(a)Mx軸坐標值比較
將測試集輸入到訓練模型中,計算每個點對應的坐標值,并與已知的坐標值進行對比,結果如圖7所示。由圖7a和圖7b可以看出,目標值與檢測值絕大多數可以做到良好的擬合,只有極少數的點偏離較大,為了評價測試結果的準確度,引入均方根誤差來反映Mx軸和Ny軸測量的精密度,其計算公式如下:

(c)仿真位置與實際位置分布圖
(9)
式中,Xobs,i為第i個目標值;Xmodel,i為第i個觀測值;k為樣本數量的總和。
經過計算得到ERMSE,Mx=1.262 mm,ERMSE,Ny=1.073 mm,由此可見訓練模型具有較高的精度。
由圖7c可以看出,仿真結果與實測點可以達到較好的擬合效果。
4.2 壓力檢測
搭建壓力標定實驗平臺,實時采集在不同質量的砝碼作用下,內部壓力的變化值。為了保證不同質量的砝碼具有相同的接觸面積,將砝碼放在打印好的托盤上,打印了面積大小不同的托盤,用來研究相同質量的砝碼在不同接觸面積的作用下對內部壓力的影響,如圖8所示。
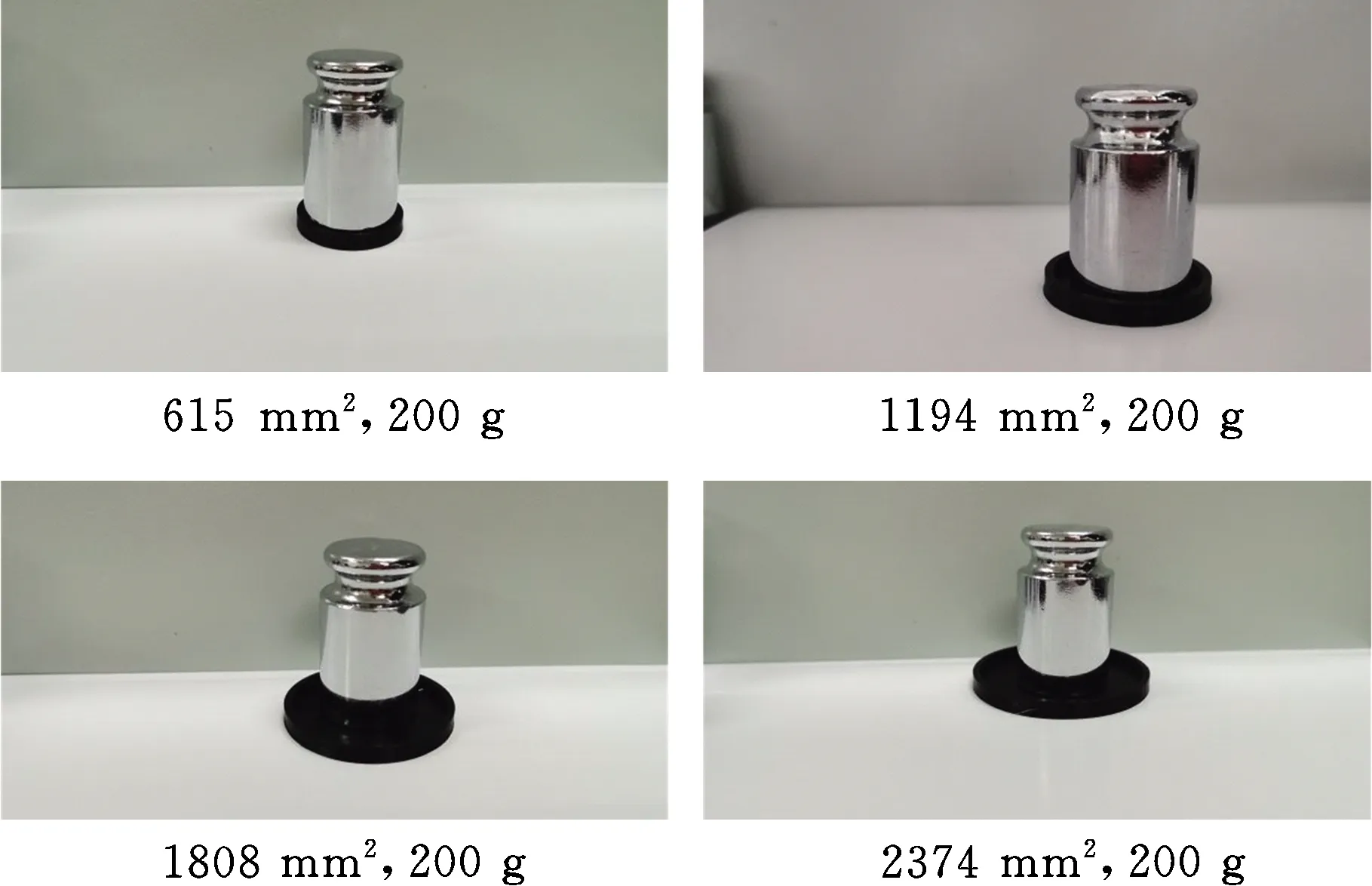
(a)托盤與砝碼
對采集到的數據進行標定,建立外部載荷和內部相對氣壓的響應曲線(圖9)。
(1)線性化擬合。圖9a所示為在1600 Pa初始相對壓力基礎上,傳感器受力與內部氣體壓力變化的關系。由此可知,當外部載荷達到7 N時,防護與信號提取導電布與導電涂層發生接觸,內部壓力不再增大,在所施加的力逐漸增大的過程中,內部壓力基本以線性關系同步增大。利用最小二乘法對其進行線性擬合,靈敏度K1=85.69 Pa/N,在響應范圍內的相關系數R2=0.9937。
(2)不同接觸面積測試。不同接觸面積測試是指在相同的初始壓力下,對于相同大小的力,不同的作用面積是否影響測量的精度。如圖9b所示,同樣壓力下,不同接觸面積對內部壓力的影響相對較小。
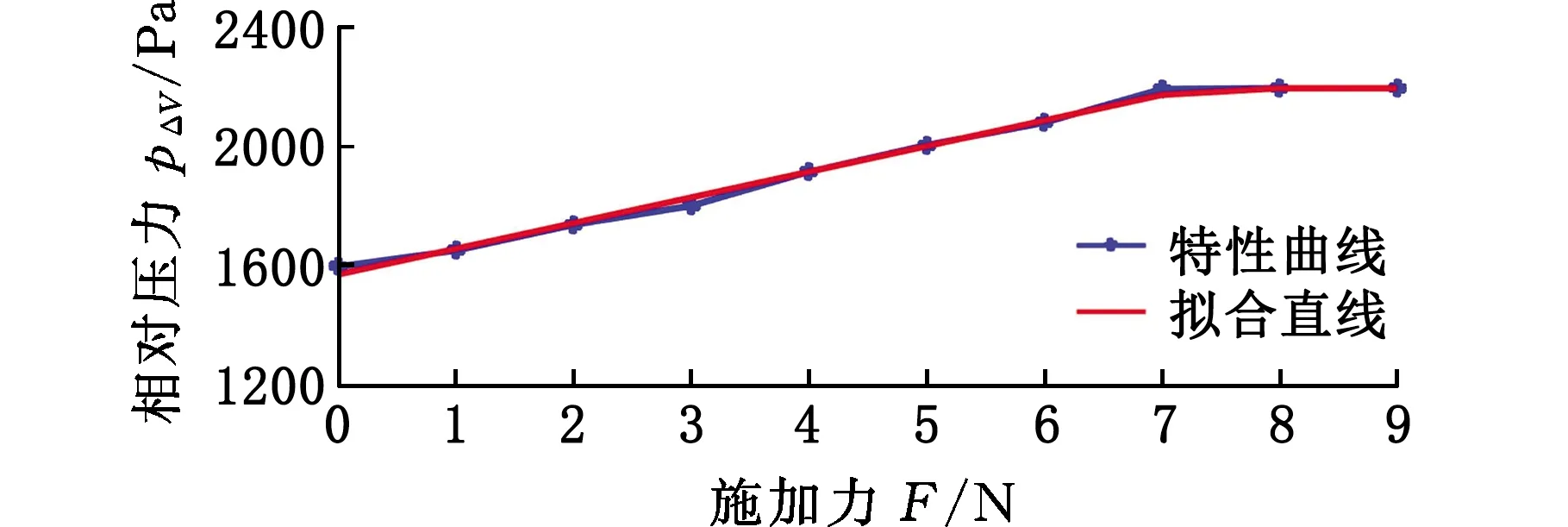
(a)特性響應與線性擬合
(3)靈敏度與量程測試。分別以初始相對壓力960 Pa、1250 Pa、1600 Pa、1900 Pa繪制了內部壓力與外部載荷之間的關系曲線。并采用圖9a的方法對其進行線性擬合,結果如圖9c所示,可以看出,傳感器的初始壓力越高,其靈敏度越低,但量程越大。
(4)重復性測試。在傳感器同一位置上進行多次加載測量,重復4次試驗,結果如圖9d所示,說明該傳感器具有良好的重復性。

由上述測試結果可知,所提出的觸覺傳感器具有較高的線性度和靈敏度,良好的可重復性和一致性。
4.3 傳感器性能測試
以初始相對壓力960 Pa為例,對動態碰撞信息進行檢測,實驗如圖10所示。

(a)無接觸時碰撞
實驗結果表明,在傳感器表面施加質量為200 g 砝碼的情況下不會顯示接觸位置坐標,只顯示力的大小2.12 N;當砝碼質量增大至500 g時與導電層接觸,同時顯示對應接觸位置到坐標(143,154)與力的大小4.89 N。
5 結論
(1)基于曲面電勢分布理論和壓縮氣體定律設計和制備了一種兼具位置檢測和壓力反饋的柔性氣囊型觸覺傳感器。利用機器學習算法對電勢分布進行重構,通過獲取某一點的電勢值,從而確定該點的位置坐標。仿真結果表明Mx軸坐標值的均方根誤差為1.262 mm,Ny軸坐標值的均方根誤差為1.073 mm。利用最小二乘法,建立外部載荷和內部氣壓變化的線性擬合關系,此外在接觸壓力檢測方面具有良好的可重復性和一致性。
(2)搭載了信號處理電路和Labview顯示界面,實現了接觸位置和接觸壓力的實時可視化顯示,并且具有良好的精度和魯棒性。氣囊型觸覺傳感器研究具有很高的科研價值,為人機交互提供了新的方向。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48