水下導向攻泥器鉆進過程動力學建模及實驗驗證
2022-08-06 07:13:50徐寶林楊雙喜王俊杰陳英龍
液壓與氣動 2022年7期
徐寶林,楊雙喜,王俊杰,陳英龍
(1.江門職業技術學院 機電技術系,廣東 江門 529009;2.大連海事大學 船舶與海洋工程學院,遼寧 大連 116000)
引言
隨著海洋經濟、船舶運輸、海洋資源開采、海上旅游事業等蓬勃發展,船舶向大型化發展,并逐漸駛向深水區的同時,海損事故船舶大型化、深水化趨勢明顯[1]。為保障海上航行人員安全,避免航道堵塞,減少海洋環境污染,需對海洋沉船實施定期及快速打撈。
攻千斤是沉船打撈工程的重要工藝,是通過專用裝備將抬浮沉船用的鋼纜穿引過沉船船底。作為多種救助打撈方式的先導,攻打千斤洞和完成穿引過底千斤技術的效率和和質量往往決定了救助打撈作業的成敗。
沉船打撈作業中,攻打千斤洞的主要方式有潛水員人工攻打和非開挖定向鉆機攻打。在淺水區人工攻打技術已經十分成熟,但人工攻千斤仍存在過程復雜、危險性高、效率低和精度不足等缺點。水下導向攻泥器(水下非開挖定向鉆機)基于陸地非開挖技術,石油工業受控定向鉆進技術與管線技術結合的一種新裝備新技術,可以用來對沉沒水域水深較大的沉船沉物進行過底千斤洞攻打,通過機械化替代人力化攻千斤,非開挖技術施工效率高、工程成本低[2]。
實際水下工作環境復雜,常有管道等埋于海底,障礙物較多。利用攻泥器進行沉船打撈作業,為保證安全鉆進,千斤洞軌跡的優化設計和最優數學模型的建立顯得更加有必要[3]。
近年來,國內外不少學者圍繞沉船打撈以及非開挖定向鉆機開展深入研究。張峰瑞等[4]針對大噸位沉船打撈升沉補償技術,提出雙駁半主動升沉補償打撈系統;周益邦等[5-6]介紹了液壓系統在鉆孔器中應用,對水平定向鉆進行液壓系統設計以及優化;陳英龍等[7]對水下非開挖鉆機動力頭進行推進阻力和回轉力矩計算,并設計基于壓力流量復合控制的電液驅動系統;張自力等[8]分析了水平定向鉆控向精度影響因素,通過引入水鉆等方式提升定向鉆穿越的控向精度;朱清帥[9]分析定向鉆回拖阻力構成,總結幾種回拖力計算公式適用范圍;劉永剛[10]分析非開挖鉆桿實際作業工況,總結鉆桿失效原因并對鉆桿進行改進;李志杰等[11]基于裂紋擴展預測方法推導的鉆桿疲勞壽命計算公式,并通過疲勞實驗驗證算法的準確性和安全性;閆雪峰[12]針對大直徑非開挖水平定向鉆環空巖屑運移研究鉆桿運動和巖屑運移規律。
利用水下攻泥器進行攻千斤作業過程中,動力學模型對導向控制起重要作用。王宇[13]針對鉆機對打鉆速,基于二次回歸模型進行性能優化;胡志強等[14]建立了鉆柱-鉆頭-巖石系統動力學模型,采用有限元法模擬了三牙輪鉆頭破巖鉆進的動態過程;朱才朝等[15]利用能量法研究鉆頭縱向、橫向和扭轉三個方向動力學;李琴等[16]基于達朗貝爾原理和有限元法,建立擴孔器-巖土相互作用動力學模型;LUC P[17]針對由可旋轉鉆頭轉向系統引導的旋轉鉆頭,構建了控制鉆頭3D運動學的動力學模型。
本研究以沉船救助與打撈的水下導向攻泥器為研究對象,首先基于陸地非開挖定向鉆工作原理和土力學理論進行水下攻泥器鉆進軌跡設計,鉆頭靜力學和鉆桿彎曲變形分析,加入圓孔擴張理論優化曲線鉆進彎矩模型;其次,采用牛頓-歐拉法建立鉆頭動力學方程,并通過MATLAB進行鉆進軌跡仿真分析;最后,開展了非開挖鉆進實驗,對所建立的動力學模型進行了驗證,通過實驗與仿真對比分析,驗證所提出的鉆頭動力學模型。
1 攻泥器導向原理與鉆進軌跡設計
水下導向攻泥器進行攻打過底千斤時,主要有兩種工作軌跡,一種是鉆進過程軌跡為曲線,另一種是鉆進過程軌跡為直線,其關鍵技術源于陸地非開挖定向鉆。
1.1 定向鉆工作原理
陸地定向鉆基本工作原理為:液壓系統提供推進力和旋轉,通過鉆桿傳遞給鉆頭,由于鉆頭存在斜面,當液壓系統只提供靜推進力時,鉆頭所受和力與鉆桿垂直,帶動鉆桿產生偏移,鉆機進行曲線鉆進;當液壓系統同時提供靜推進力和旋轉,鉆桿將帶動鉆頭旋轉,此時鉆頭所受合力為0,鉆機進行直線鉆進[18]。
1.2 鉆進軌跡設計
水下攻泥器鉆進軌跡近似如圖1所示,A-B段為斜向下造斜段,鉆進軌跡從A點開始且與水平面成α1角度,攻泥器受不平衡力開始斜向下鉆進,直到鉆桿到達水平鉆進點B即打撈沉船所需深度,形成曲率半徑為R1的曲線;B-C段為水平鉆進段,此時液壓系統為鉆桿提供推進力和旋轉,使得攻泥器豎直方向受力近似為0,只在水平方向上運動,鉆進位移為L2;C-D段為斜向上造斜段,由C點開始斜向上鉆進過程,形成曲率半徑為R2的曲線,從D點完成出土,導向角由0°增大至α2。

圖1 鉆進軌跡示意圖Fig.1 Schematic diagram of drilling trajectory
按照圖1所示,根據入土角α1,水平位移L1,L2,出土角α2設計的鉆進軌跡,經幾何關系計算得:
(1)
(2)
(3)
(4)
根據上述公式可知,水下攻泥器鉆進軌跡可由入土角α1、曲率半徑R1,R2、最大所需深度H、出土角α2獲得。
2 鉆頭負載力學建模
2.1 鉆頭靜力學分析
對鉆頭進行靜力學分析時,只考慮液壓系統,土體地質,鉆桿/鉆頭材料和尺寸、沉船船底深度等具有規律性影響的因素,鉆進過程鉆頭受力示意圖如圖2所示。

圖2 鉆頭受力示意圖Fig.2 Schematic diagram of drill bit force
推進力F由液壓系統為攻泥器提供,為實現鉆頭擠壓土體成孔,需保證推進力大于水下攻泥器表面阻力即土體作用力、土體摩擦力、導向板摩擦力、鉆頭/鉆桿摩擦力等之和。
其中土體作用力F1與導向板垂直,阻礙鉆頭向前鉆進,軸向分量為F1x,垂直分量為F1z:
(5)
式中,γ——土體重度
C——土體黏聚力
Kp——被動土壓力系數
L——導向板長度
B——導向板寬度
土體摩擦力F2為土體顆粒之間相對運動,沿滑移面運動部分土體作用于導向板上阻力,軸向分量為F2x,垂直分量為F2z:
(6)
式中,φ——土體內摩擦角
α——導向角
F3為鉆進過程中,土體與導向板之間的摩擦阻力,其軸向分量為F3x,垂直分量為F3z:
(7)
式中,μ導向板與土體之間動摩擦系數。
F4為鉆機攻進過程中,土體與鉆桿/鉆頭之間的軸向摩擦阻力:
F4=γH0π(D·L鉆頭+d·L總)μ2
(8)
式中,D——鉆頭直徑
d——鉆桿直徑
L鉆頭——鉆頭長度
L總——鉆桿在土體中總長度
μ2——鉆頭/鉆桿表面與土體之間摩擦系數,一般取0.1
F5為液壓推進力作用于鉆頭時,導向板受土壤沖擊產生的慣性力:
dm(vm-v0)=F5·dt
(9)
式中,v0——土體的滑移面處運動初速度
vm——土體向前的運動速度
假設v0=0,vm可視為攻泥器前進速度,則式(9)可化簡為:
(10)
根據土力學原理,單位時間導向板沖擊土體的質量為:
(11)
將式(11)帶入式(10)得:
(12)
式中,vt鉆頭推進速度。
將導向板、鉆桿與鉆頭所受合力沿鉆桿軸向和周向分解,軸向合力使鉆機向前鉆進,周向合力使鉆機沿預定曲線鉆進。
2.2 鉆桿彎曲變形分析
由于導向板斜面的存在,使得鉆進過程中鉆頭兩側受力不平衡,并在鉆桿上產生彎矩,加上鉆桿存在彈性模量發生偏轉,鉆進軌跡成一條曲線,而鉆頭導向彎曲程度與負載力矩相關,將鉆頭的導向彎曲過程分解如圖3所示。
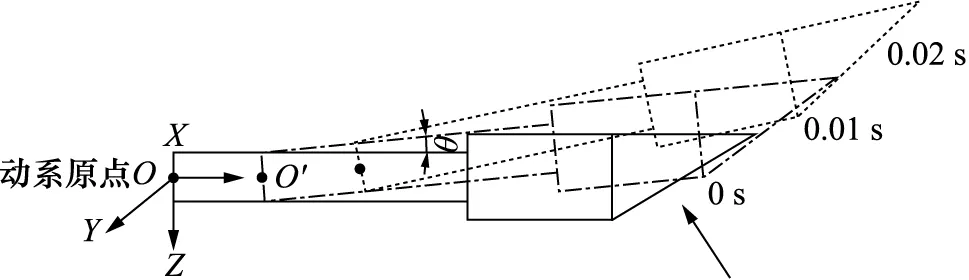
圖3 導向彎曲過程分解示意圖Fig.3 Exploded schematic diagram of guided bending process
點O為動系原點,X方向為鉆頭進給方向,Z軸垂直于X軸向下,Y軸垂直于XOZ平面向外,到下一工作時刻,鉆頭原點變為O′點,運動過程近似可分為沿X軸正向移動和繞Y軸轉動,由于后部鉆桿限制,Z軸方向位移近似不變。
1) 圓孔擴張理論
如圖4所示,基于土體的基本假設,可將鉆頭附近土體劃分為塑性區Ru≤R≤Rp,彈性區Rp≤R≤∞,兩區交界處半徑為Rp[19]。在鉆進初始時,鉆頭受半徑為Ri的圓形均布壓力,隨著水下攻泥器在海底中鉆進,鉆頭逐漸產生偏移,鉆孔半徑增大至最大值Ru,鉆頭所受均布壓力變為最大值pu。

圖4 圓孔擴張理論示意圖Fig.4 Schematic diagram of circular hole expansion theory
實際鉆進過程中,鉆孔半徑由R0→Ru,鉆桿受F1,F2,F3和鉆頭頂等效合力F6作用,該合力作用于壓縮變形土體,大小與鉆桿變化角度和壓縮變形部分土體剛度有關。
據周炳勤[20]的研究,圓孔擴張問題極限擴張壓力可表示為:
(13)
式中,p0——鉆頭初始半徑所受圓形均布壓力
A1,A2,A3——與土體相關的常數
φ0——土體的內摩擦角
c0——土體黏聚力
β——軟化參數
I——擴張半徑與初始半徑的比值
如圖3、圖4所示,假設經過Δt時間,鉆桿變化角為θ,土體受鉆頭擠壓產生壓縮變形,鉆頭頂側受力F6作用,其合力矩M6可表示為式(14):
M6=ω·k1·Δt
(14)
式中,ω——鉆進變化角速度
k1——海底地質剛度系數
2) 鉆桿彈性變形分析
按材料力學可知,在曲線鉆進過程中,由于鉆孔限制,鉆桿將受到一個外力,產生彎曲變形,形成彎矩M7用式(15)表示,并施加給鉆頭體反彎矩:
(15)
式中,E——鉆桿彈性模量
LG——鉆桿彎曲部分實際長度
A——鉆桿橫截面積
鉆桿角度變化如圖3所示,綜合海底地質、鉆桿自身材料和管徑等諸多影響,利用上述分析方法,求得水下導向攻泥器在進行曲線鉆進過程中,所受彎矩的大小如表1所示。

表1 鉆頭曲線鉆進彎矩模型Tab.1 Curved drilling bending moment model of drill bit
3 鉆頭動力學建模
3.1 坐標系選取及參數定義
為描述水下導向攻泥器鉆頭在海底鉆進動態過程,建立固定坐標系E-ζηξ和運動坐標系O-XYZ如圖5所示。坐標系E-ζηξ在地球上,坐標系原點E為鉆頭初始運動時位置,Eζ軸與Eξ軸在水平面上,Eη軸垂直于Eζξ平面,鉆頭運動遵循牛頓第二定律,通過固定坐標系E-ζηξ可確定鉆頭相對于地球的位姿。坐標系O-XYZ坐標原點取在鉆頭質心處,OX軸沿鉆頭軸向指向頭部,OZ軸在鉆頭對稱面內向下為正方向,OY軸垂直于OXZ平面且向外指出。

圖5 鉆頭坐標系Fig.5 Drill bit coordinate system
用鉆頭3個姿態角Φ,θ,ψ描述鉆頭鉆進坐標系O-XYZ到坐標系E-ζηξ的坐標轉換關系。面向角Φ為繞X軸旋轉角度,用來描述鉆桿旋轉的角度;導向角θ為鉆桿繞Y軸旋轉的角度,用來描述鉆桿彎曲的角度;偏向角ψ為鉆頭繞Z軸旋轉的角度。
將第2部分中鉆頭所受外力,在O-XYZ坐標系下進行矢量分解,FX,FY,FZ分別為3個坐標軸上受力大小,K為鉆桿繞X軸的旋轉力矩,M為鉆桿繞Y軸的彎曲力矩,N為鉆桿繞Z軸的偏離力矩;將鉆頭O-XYZ坐標系相對于E-ζηξ坐標系的速度,按O-XYZ的3個方向軸進行矢量分解,用u表示沿X軸前進速度,v表示繞Y軸的彎曲速度,w表示沿Z軸的偏離速度;將鉆頭O-XYZ坐標系繞E-ζηξ坐標系的旋轉角速度φ,按相應歐拉角關系進行角速度矢量分解,用p表示繞X軸的旋轉角速度,q表示繞Y軸的彎曲角速度,r表示繞Z軸的偏轉角速度。
3.2 鉆頭動力學建模
實際鉆進過程中,為討論鉆桿、鉆頭與土壤相互作用,確定水下攻泥器鉆進動態過程中驅動力、阻尼力、位移、速度變化,采用牛頓-歐拉方法建立鉆頭動力學方程表示為:

(16)
水下導向攻泥器在海底鉆進過程可視沿x軸正向移動和繞y軸轉動,則式(16)可近似表示為:
(17)
式中,m——鉆頭質量
v1=[uvw]T——鉆頭速度矩陣
v2=[pqr]T——鉆頭角速度矩陣
I0——鉆頭轉動慣量矩陣
F,M——外力及外力矩
取鉆頭與鉆桿連接處為質心,rG=(xG,yG,zG)T為鉆頭動系下重心坐標。
將外力F沿運動坐標系3個方向軸分解為FX,FY,FZ,各個分力對鉆桿產生的力矩分別為MX,MY,MZ,則動力學方程可表示為式(18):
(18)
通過轉換矩陣,將運動坐標系下物理量轉換為固定坐標系下,并求得鉆頭在固定坐標系中位姿。
3.3 仿真分析
按照水下導向攻泥器的工作需求,采用MATLAB中的S函數進行水下攻泥仿真,研究液壓系統驅動力、海底地質以及鉆桿彈性模量等對鉆進軌跡、鉆頭導向角變化的影響。
1) 液壓系統驅動力的影響
水下導向攻泥器由液壓系統提供驅動力,針對黏土地質,鉆頭初始導向角為-30°,對鉆頭施加不同驅動力,研究驅動力變化鉆進軌跡、導向角變化的影響,仿真結果如圖6所示。
由圖6可知,在80,90,100 kN推力下,水平位移ζ最大值分別為54,57,61 m;鉆頭推進力為80,100,120 kN時,鉆頭導向角變化至0°的時間分別為17.5,19.5,20.5 min。可以看出,對鉆頭施加的推進力越大,鉆進軌跡越長,完成相同導向角變化量所需時間越長。

圖6 液壓系統驅動力仿真分析Fig.6 Simulation analysis of driving force of hydraulic system
2) 海底地質變化的影響
我國渤海、黃海區域海底表面沉積物主要以砂礫和黏土為主,鉆頭在不同地質中所受阻力不同,對鉆頭施加80 kN推進力,初始導向角-30°,研究鉆頭在黏土和砂礫兩種不同地質中,鉆進軌跡和鉆頭導向角變化,仿真結果如圖7所示。
由圖7可知,同一驅動力下,在黏土、砂礫地質中,水平位移ζ最大值分別為55,42 m,最大鉆進深度即豎直位移ξ最大值分別為7.7,6.0 m;繞η軸的角度變化至0°的時間分別為14,17 min。可以看出,相對于砂礫地質,鉆頭在黏土中受到阻力和彎矩較小,鉆進軌跡較長,相同時間導向角變化量較小。

圖7 海底地質變化仿真分析Fig.7 Simulation analysis of seabed geological changes
3) 鉆頭初始導向角變化的影響
在鉆進過程中,鉆頭逐漸受力發生偏轉,鉆頭的導向角在地質中緩慢改變,針對黏土地質,由液壓系統提供80 kN推進力,初始導向角分別為-30°,-25°,-20°,研究初始導向角變化對鉆進軌跡的影響,仿真結果如圖8所示。
由圖8可知,水平位移ζ最大值分別為55,44,36 m,豎直位移ξ最大值分別為7.7,5.9,3.6 m,達到最大水平推進速度的時間分別為1.90,1.91,1.92 m/min。可以看出,在同一地質和驅動力情況下,初始導向角越大,鉆進軌跡越長,最大水平速度越小。

圖8 初始導向角變化仿真分析Fig.8 Simulation analysis of initial steering angle change
4) 鉆桿彈性模量變化的影響
由2.2可知,鉆進過程中由于鉆孔限制,鉆桿發生彈性變形產生彎矩M7,并給鉆頭施加反彎矩;同時,根據式(15)可知,彎矩與鉆桿彈性模量即鉆桿與海底地質相互作用剛度系數相關。針對黏土地質,與鉆桿相互作用剛度系數分別為1×107,2×107,3×107MPa,由液壓系統提供80 kN推進力,研究不同鉆桿彈性模量情況下,鉆進軌跡和鉆頭導向角變化,仿真結果如圖9所示。
由圖9可知,水平位移ζ最大值分別29,55,78 m,豎直位移ξ最大值分別為4.0,7.7,11.2 m,鉆頭導向角變化至0°的時間分別為7.5,17.5,22.5 min。可以看出,鉆進過程中,剛度系數較小的鉆桿更容易彎曲,鉆進軌跡越短,鉆桿偏轉越明顯,完成相同導向角變化量所需時間越短。

圖9 鉆桿彈性模量變化仿真分析Fig.9 Simulation analysis of drill pipe elastic modulus changes
5) 動力頭旋轉的影響
由1.1可知,動力頭是否旋轉決定鉆頭軌跡是否發生偏轉,對鉆頭施加120 kN推進力,初始導向角-14°,研究鉆頭是否旋轉對鉆進軌跡和鉆頭導向角變化的影響,仿真結果如圖10所示。
由圖10可知:鉆頭不旋轉,水平鉆進位移ζ為10 m時,豎直位移ξ為3.3 m,鉆頭導向角時刻變化;當鉆頭發生旋轉,水平鉆進位移ζ為10 m時,豎直位移Z為4.0 m,鉆頭導向角保持-30°。
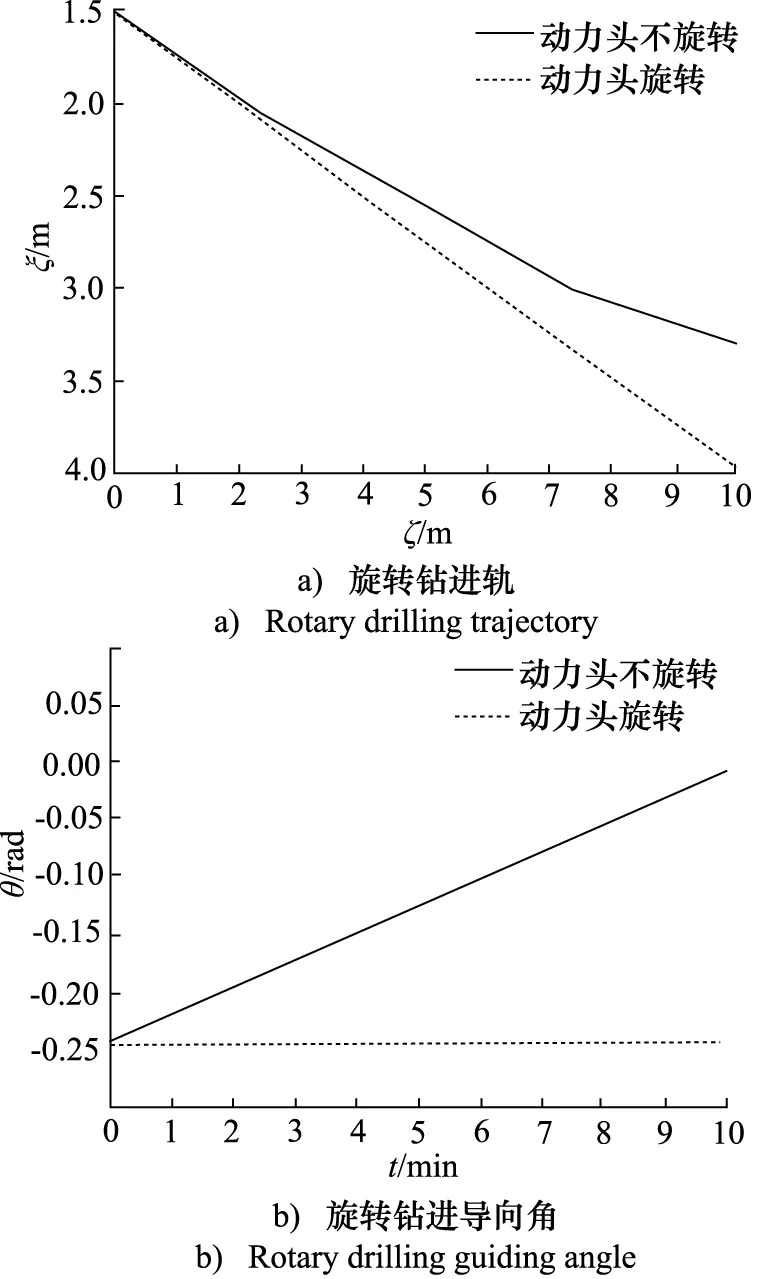
圖10 動力頭旋轉仿真分析Fig.10 Simulation analysis of power head rotation
4 非開挖鉆進實驗與驗證
實驗以Ditch Witch公司JT2720型號非開挖鉆機系統為動力源,為鉆桿和鉆頭提供推進力和轉矩,通過實驗鉆進過程鉆進軌跡和導向角變化數據與仿真進行對比,驗證動力學模型。鉆機和實驗環境參數如下:鉆機推進力112500 kN,鉆機功率93 kW,導向頭直徑0.08 m,鉆桿長度3.00 m,鉆桿直徑0.073 m,導向板長度0.248 m,導向板寬度0.1 m,鉆桿推進速度1.3 m/min,鉆桿旋轉速度200 r/min。

表2 地質參數Tab.2 Geological parameters
4.1 導向鉆進實驗
實驗采用鉆機鉆進總長約75 m,初始導向角-18.06°,進給速度1.4 m/min,鉆進孔深度1.4 m,鉆出孔2.1 m,每鉆進一根桿,做一次數據記錄。取鉆進造斜段1-8桿、22-27桿的數據與仿真進行對比如圖11所示。
實驗斜向下鉆進段1-8桿、斜向上鉆進段22-27桿鉆頭面向角為0°。由圖11可知,1-8桿造斜段豎直位移ξ最大值為4.45 m,對應水平位移ζ為17.5 m,在水平位移ζ變化量相同時,豎直位移變化量ξ逐漸減少,導向角由-18.06°變化至0°;相反22-27桿水平位移ζ變化量相同時,豎直位移ξ變化量逐漸增大,導向角由0°變化至15°。

圖11 實際導向段軌跡變化圖Fig.11 Actual trajectory change of guiding section
實驗時,為提升鉆進效率,從第22根桿增大驅動力,完成出土時,水平位移增大約2.1 m,同時相比仿真,實驗時由于不確定負載力存在,實際軌跡具有較小誤差,繞η軸角度變化基本一致。
4.2 避障鉆進實驗
考慮海底障礙和管道會影響實際鉆進過程,進行鉆機避障鉆進實驗,實驗現場簡圖如圖12所示,鉆頭12點鐘和6點鐘方向面向角分別為0°和180°,總長約50 m,初始導向角-13.89°,鉆進速度1.5 m/min,鉆進坑深度1.5 m,鉆孔深度2.5 m。將實驗鉆進數據與仿真對比如圖13所示。

圖12 避障鉆進實驗示意圖Fig.12 Schematic diagram of obstacle avoidance drilling experiment
實驗中斜向下造斜段1-6桿、斜向上造斜段12-18桿面向角為0°。由圖13可知,1-6桿導向角由-13.89°變化至0°,在水平位移ζ變化量相同距離時,豎直位移變化量逐漸減小;相反12-18桿導向角由0°開始增大,在水平位移變化量相同距離時,豎直位移變化量增大。

圖13 鉆桿參數變化圖Fig.13 Change of drill pipe parameters
將造斜段1-6桿、15-17桿鉆進軌跡和導向角變化進行仿真對比如圖14所示。由圖14可知:造斜深度為3.75 m時,水平位移ζ為15 m。實驗與仿真相比,鉆進軌跡存在較小誤差,鉆頭導向角變化基本一致,為提升效率,實驗時在15 min增大鉆進驅動力,相對于仿真相同時間內鉆頭角度變化增加。

圖14 導向段鉆桿參數變化圖Fig.14 Change of drill pipe parameters in guide section
5 結論
從土體破壞分析實際鉆進過程,基于土力學原理對攻泥器鉆頭進行負載力建模,并加入圓孔擴張理論分析優化鉆進彎矩模型。
運用牛頓-歐拉方程建立了鉆進過程鉆頭動力學模型,通過MATLAB進行仿真分析,水下導向攻泥器的液壓系統驅動力、海底底質、初始鉆進角度和鉆桿彈性模量等均會對鉆進過程產生影響。
利用非開挖鉆進技術進行實驗,通過仿真分析和實驗數據對比分析,所建立的鉆進過程動力學模型符合實際鉆進。
