基于北斗三代的鐵路監測預警系統設計
2022-08-08 07:29:24于進江楊世忠趙星宇賀云飛
鐵路計算機應用 2022年7期
關鍵詞:鐵路
于進江,甘 雨,楊世忠,趙星宇,賀云飛,何 韋
(1. 京張城際鐵路有限公司 運輸安全部,北京 100070;2. 湖南北斗微芯產業發展有限公司 技術中心,長沙 410000)
對于鐵路的安全運營來說,任何微小的異常或干擾都有可能導致嚴重的安全事故,造成經濟損失甚至人員傷亡。鐵路軌道的沿線邊坡和路基因受到雨雪、地質運動等因素的影響而存在滑坡、崩塌、沉降等安全隱患。以邊坡為例,巖體在重力、構造力、地震力,以及各種外營力的長期作用下,會有一種向下滑落的趨勢,這種趨勢受到巖體本身抗剪切、抗破壞力的阻抗。當巖體阻抗力小于向下滑落的破壞力時,巖體滑坡或崩塌的情況就會發生,并極有可能會造成災害。除了地質風險外,路基、橋梁、隧道、車站等鐵路基礎設施的狀況也影響著鐵路的運營安全。
由于北斗衛星導航系統(簡稱:北斗)在變形監測方面的作用日益凸顯[1-2],很多專家和學者已經開始將北斗應用于鐵路安全監測領域[3-5]。秦健等人[6]深入探討了北斗地基增強系統構建和基準站選址問題,但尚未涉及第三代北斗衛星導航系統(簡稱:北斗三代)的變形監測。
本文基于北斗三代高精度定位技術,設計鐵路監測預警系統,詳細闡述北斗三代的變形監測原理;同時,利用實際數據對北斗相較于全球定位系統(GPS,Global Positioning System)的優勢進行計算和論證,對比不同基線長度對變形監測精度的影響,為基準站的布設距離提供參考。
1 基于北斗三代的鐵路監測預警系統架構
基于北斗三代的鐵路監測預警系統以北斗三代接收機為核心,融合位移、雨量、水位等全維度感知信息,能夠實時且動態地測量監測點的要素變化,通過高通量、自適應、多回路的通信網絡將監測數據全天候、不間斷地回傳至監測云平臺。監測云平臺對回傳的監測數據進行計算和分析,根據結果發出預警信息,保障鐵路的安全運營。
1.1 以北斗為核心的實時感知網絡
1.1.1 北斗區域增強系統
北斗區域增強系統為服務區域內提供永久性、連續運行的差分信息,避免同一區域內基準站的重復建設,提高設備的利用率。
北斗區域增強系統由連續運行的基準站網、控制與數據中心、高速數據通信網、運營服務等子系統組成。各子系統主要功能及其構成,如表1所示。

表1 各子系統的功能及其構成
1.1.2 多維度實時感知網絡
多維度實時感知網絡的主要功能是針對災害隱患點建設全維度地質災害誘發因素(如災害體位移、氣象環境、水位、含水量等)監測網絡,由全維度監測傳感設備組成。多維度實時感知網絡通過這些傳感設備采集影響或誘發地質災害的可量化信息,為災害監測、風險評估、地災預警、應急管理等提供數據依據。多維度實時感知網絡的典型配置如表2所示。

表2 多維度實時感知網絡的典型配置
表2所列配置能夠監測造成滑坡災害的相關因素。各感知設備的作用如下。
(1)高精度北斗三代監測站
高精度北斗三代監測站是核心設備,由北斗三代接收機、結構件、供電設備構成,提供高精度三維位移信息。
(2)雨量計
降雨是誘發滑坡災害的主要因素,降雨量是滑坡災害監測中必要的監測因素。多維度實時感知網絡能夠通過隱患點區域設置的雨量計,實時采集隱患點的小時降雨量信息,實現對滑坡災害的預警。
(3)深部位移計
深部位移監測通過打孔方式在災害體深層不同深度安裝深部位移監測設備,采集災害體深層的傾斜及相對位移變化,從而獲得地質內部結構變化情況,為災害體發展及變化趨勢提供多維度的監測數據。深部位移計是監測滑坡災害誘發因素的重要手段。
(4)土壤含水量傳感器
土壤含水量的變化可導致土體自重、土體粘接力和內摩擦角的變化,從而使土體內部力學平衡結構產生變化。土壤含水量是發生滑坡災害的重要因素,因此,多維度實時感知網絡通過土壤含水量傳感器監測土體中多層次的水分含量變化,對土體內部的平衡結構進行監測。
(5)孔隙水壓計
孔隙水壓力增大易引起感知體失穩。監測孔隙水壓力,不間斷地感知災害體在土體固結、基礎變形、水流滲透等因素作用下孔隙水壓力的大小和變化,能夠為多維度實時感知網絡分析災害體的穩定性提供物理數據依據。
(6)視頻監控設備
視頻監控作為常見的可視化監測手段,可以直觀地觀察被監測災害體的變化情況。此外,具有夜視功能的視頻設備可以實現對災害體24 h不間斷監測。同時,遠程云臺控制功能可以使監測人員通過遠程控制的方式全面了解災害體周邊情況。
(7)聲光報警器
聲光報警器能夠進行聲音告警及光電告警,快速且直接地提醒災害體周邊的群眾。
1.2 高通量自適應多回路通信網絡
為了保證監測數據能夠不間斷實時回傳至云平臺,鐵路監測預警系統設計了多回路通信鏈路,由蜂窩移動通信網、窄帶物聯通信網及天基衛星網組成。當蜂窩移動網和窄帶物聯通信網受到災害影響且通信中斷時,通信可以切換至天基衛星網,這是因為衛星通信不受地域限制,不受災害影響,且支持靈活部署。
鐵路監測預警系統使用的寬帶衛星一體化設備為Ka波段終端,該終端可直接提供RJ45接口,方便其他設備接入。寬帶一體化設備如圖1所示。
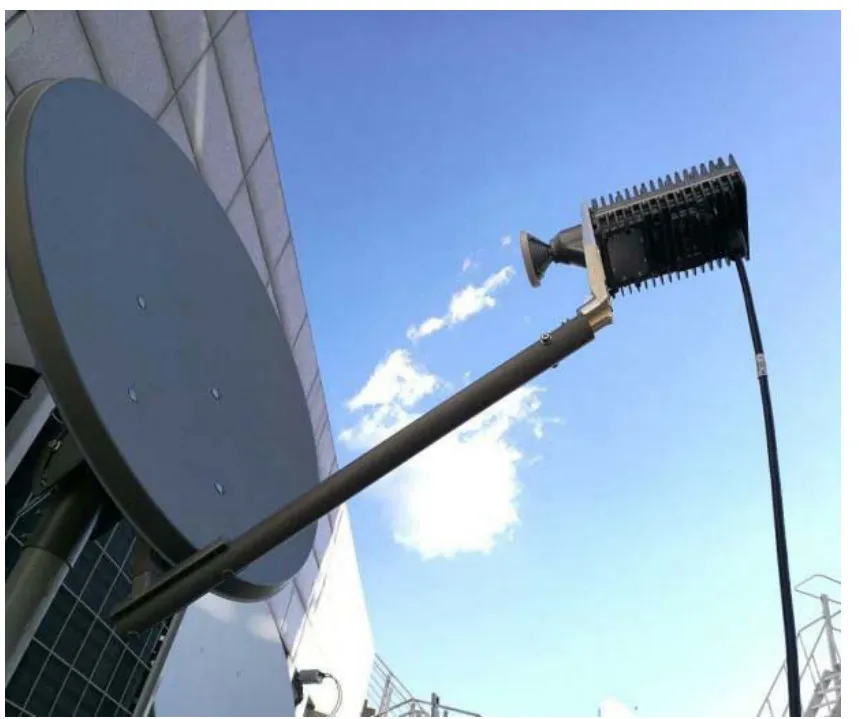
圖1 寬帶衛星一體化設備
1.3 云平臺
鐵路監測預警系統通過監測云平臺,依托高吞吐量數據處理技術、并行業務集群計算技術,實現快速評估地質災害隱患點的風險,并提供相應的預警預報及輔助決策信息,建立地質災害隱患點的全面防控體系,實現地質災害可控制、可預防。
云平臺能夠對所有監測數據進行清洗、分析、匯集、存儲和管理,并基于云計算技術對監測數據進行分布式大數據分析及處理,得到所有監測對象的全維度監測信息。云平臺監測的北斗位移情況如圖2所示。

圖2 云平臺監測的北斗位移情況示意
鐵路監測預警系統通過云平臺集成的大數據分析和處理模塊進行數據處理和可視化展示。當異常情況發生時,鐵路監測預警系統將通過現場廣播、電話、短信、郵件等形式實時向管理機構匯報預警信息,并提供高精度實時應急管理支持。
2 北斗變形監測技術
2.1 雙差相對定位
北斗定位的誤差源主要包括星歷誤差、衛星鐘差、接收機鐘差、電離層時延、對流層時延等因素,這些誤差源產生的影響可以通過雙差相對定位進行消除。在一定距離內,同步觀測的北斗接收機之間存在誤差相關性,通過觀測值之間組差,可使誤差被消除或大幅削弱,得到較高精度的相對位置。
監測站接收機j與衛星q的載波相位觀測方程[7]為

若于基準站接收機i對衛星q進行同步觀測,可得觀測方程為

兩個監測站間觀測方程組差,可得站間單差觀測方程為

兩個監測站同時對衛星p也能得到單差觀測方程,在不同衛星p、q間觀測方程組差,可得站星雙差觀測方程為

解算雙差觀測方程時,基準站接收機i坐標由其他渠道獲得,對觀測方程中的和線性化,則有和為坐標近似值計算的幾何距離,為接收機到衛星的方向余弦,dX為所求位置改正數向量參數。

將方向余弦表示為更簡潔的向量形式,則有

將所有共視衛星雙差觀測方程聯立,構成矩陣形式的雙差觀測方程組

其中,X代指dX,整周模糊度向量N由構成,A為觀測系數矩陣,e為觀測噪聲向量。
解方程組可得位置浮點解和模糊度浮點解。
要得到毫米級位置測量結果,必須對浮點解進行固定,將整周模糊度參數恢復為整數。模糊度搜索實質是求解整數最小二乘估計值,而最小二乘模糊度降相關平差(LAMBDA,Least Square AMBiguity Decorrelation Adjustmen)方法目前體系完整、應用廣泛,能夠對原始模糊度進行整數變換,降低模糊度之間的相關性,縮小搜索范圍。
將混合整數最小二乘估計轉化為整數最小二乘估計問題[8],如式(8)所示。


2.2 高精度北斗相對定位解算軟件
高精度北斗差分定位解算軟件使用獨特的周跳探測與修復和部分模糊度快速固定技術來提高系統的精度、連續性、完好性,并且在干擾和部分遮擋環境下,仍然能提供高精度的定位信息。
準確探測周跳是北斗高精度載波相位測量的關鍵問題。周跳會引起位置解算結果發生分米級以上的跳變,影響災變評估和預警分析。目前廣泛使用的TurobEdit探測法[9]由于其中的MW(Melbourne-Wubeena )組合包含偽距觀測,受多路徑效應和衛星高度角的影響,可能無法探測到1~2周的小周跳。使用小波、經驗模分解等信號降噪的方法降低MW組合觀測值的噪聲,有效降低探測量噪聲后,能夠探測出所有的小周跳。
使用基于位置約束的多頻模糊度融合解算方法,將多頻寬巷直接固定法與LAMBDA搜索固定方法聯合,逐級固定模糊度。使用部分模糊度固定的概念,通過浮點解驗后方差估計,對雙差殘余誤差較大的觀測值進行判別和篩選,利用測量條件和幾何結構最優的模糊度子集進行固定,提升固定成功率,增加北斗高精度解算的可用性和實時性。
2.3 北斗三代與GPS定位精度對比
北斗三代與GPS定位精度對比的試驗數據來自某北斗監測站,該監測站的接收機能同時接收北斗數據和GPS數據,如圖3、圖4及表3所示。
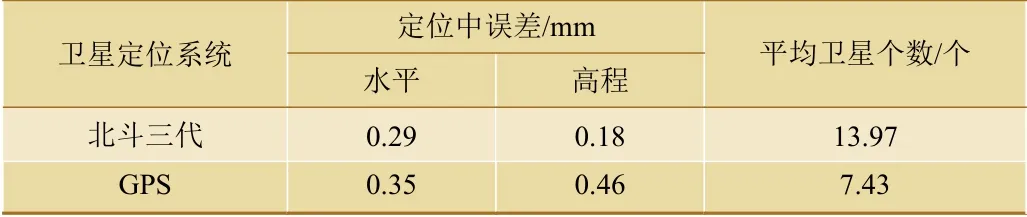
表3 北斗與GPS定位誤差對比
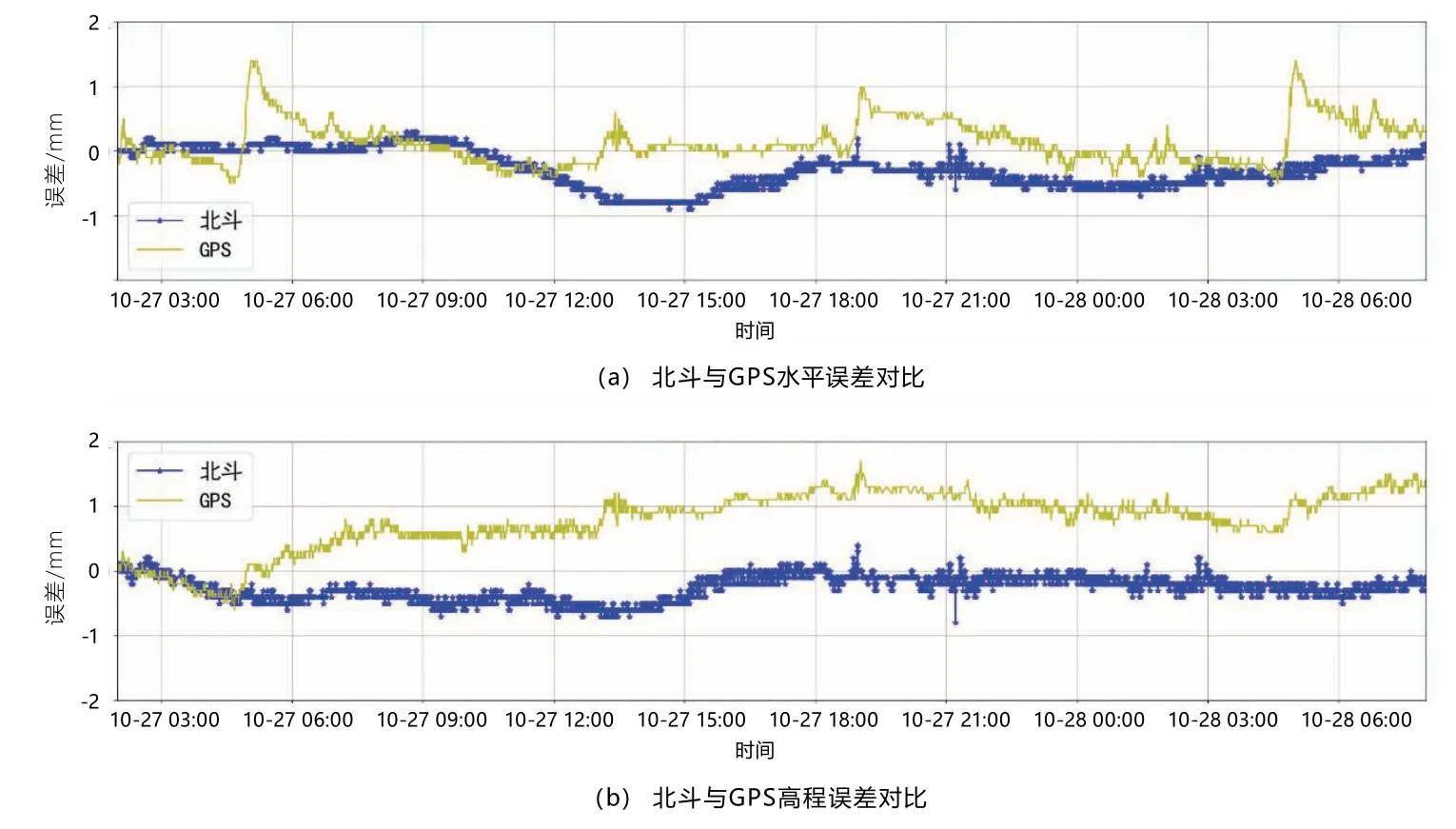
圖3 北斗與GPS定位誤差對比
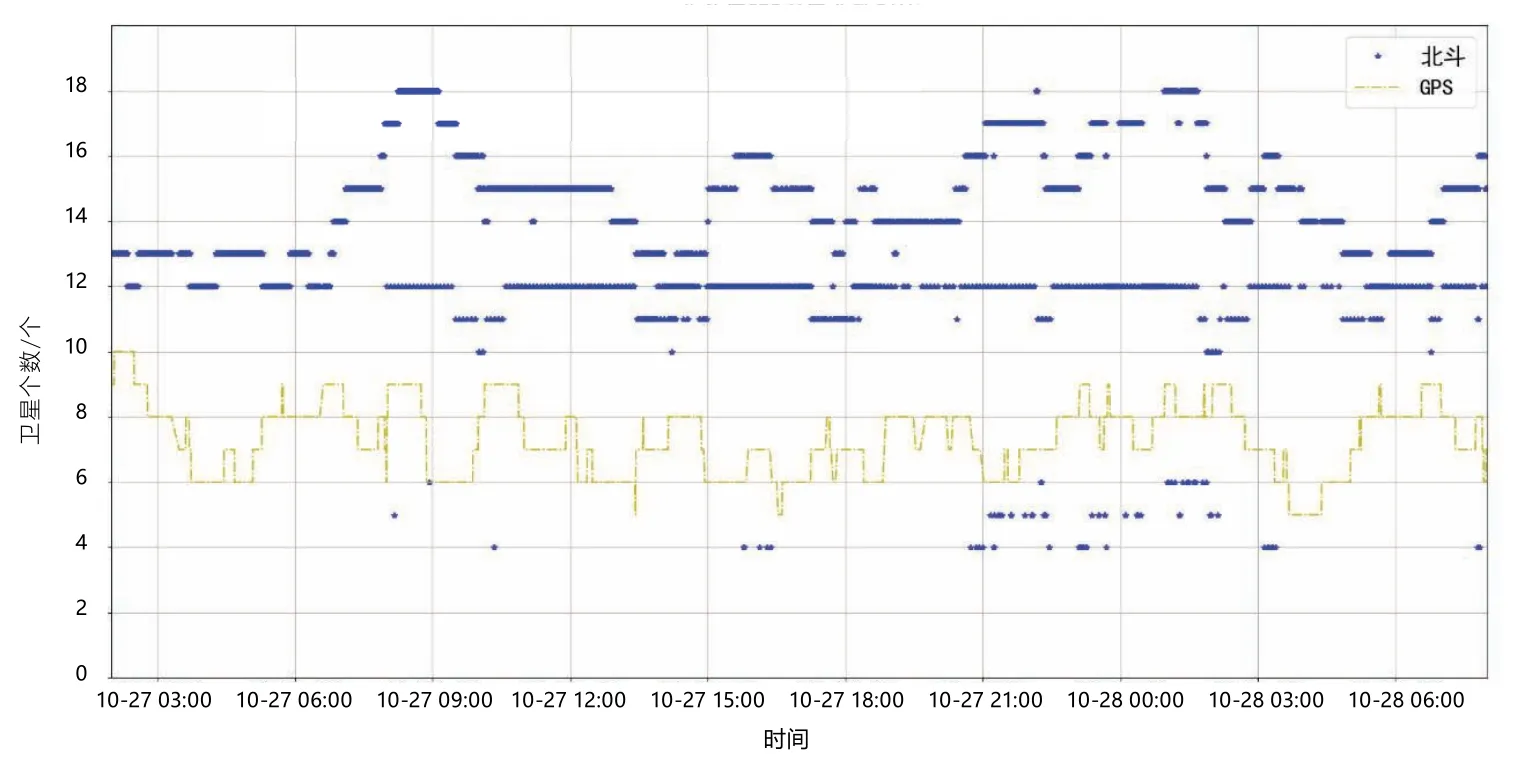
圖4 北斗與GPS定位衛星個數對比
從以上圖、表可知,北斗衛星個數明顯多于GPS;北斗衛星幾何結構優良,定位誤差明顯低于GPS;北斗三代系統在變形監測方面具有顯著優勢。
3 基線長度測試與分析
試驗現場包括一個北斗三代監測站和一套北斗區域增強系統,增強系統中距離北斗監測站最近的兩個基準站距離分別為1 km和3 km,北斗監測站的接收機天線安裝在沉降和位移平臺上進行測試。在試驗過程中,我們使用測試臺不斷調整沉降和位移量,通過解算變形量與實際調整變形量的對比來分析不同基線長度下北斗三代系統解算精度。
3.1 1 km基準站北斗數據分析
圖5和圖6分別為1 km基站的北斗實測數據與標定臺數據的對比曲線。可以明顯看出,當每一級標定臺位移變化時,北斗實測數據均緊跟著發生變化,且變化趨勢一致。1 km基站的位移數據較沉降數據更加穩定,與標定臺數據非常吻合。
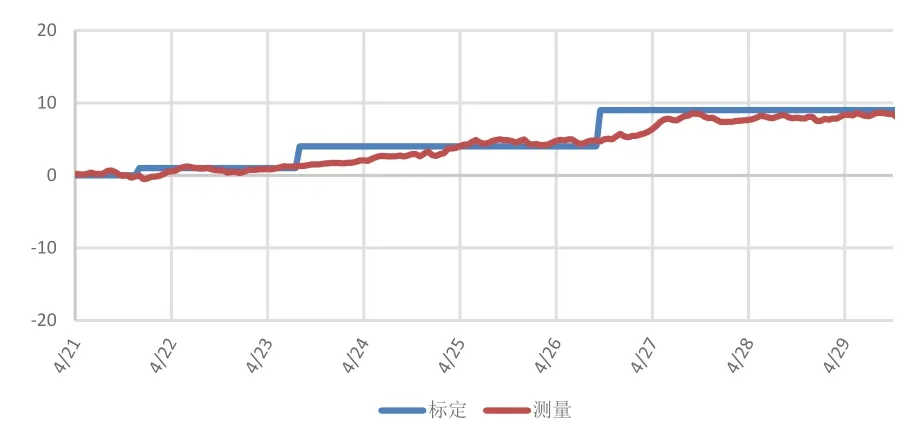
圖5 1 km基站水平位移變化曲線
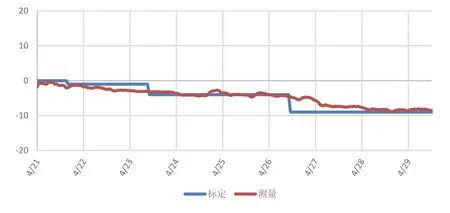
圖6 1 km基站豎直沉降變化曲線
表4和表5分別為1 km基站的水平位移和豎直沉降數據統計情況。在整個標定過程中,水平位移共調整了4次,內符合精度在0.227~0.351mm,外符合精度在0.427~1.574 mm。豎直沉降共調整了4次,內符合精度在0.146~1.456 mm,外符合精度在0.979~2.150 mm。

表4 1 km基站水平位移統計

表5 1 km基站豎直沉降統計
3.2 3 km基準站北斗數據分析
圖7和圖8分別為3 km基站的北斗實測數據與標定臺數據的對比曲線。可以發現,當每一級標定臺位移變化時,北斗實測數據均緊跟著發生變化,且變化趨勢一致。相對于1 km基站的數據來看,3 km基站的數據波動幅值更大。

圖7 3 km基站水平位移變化曲線
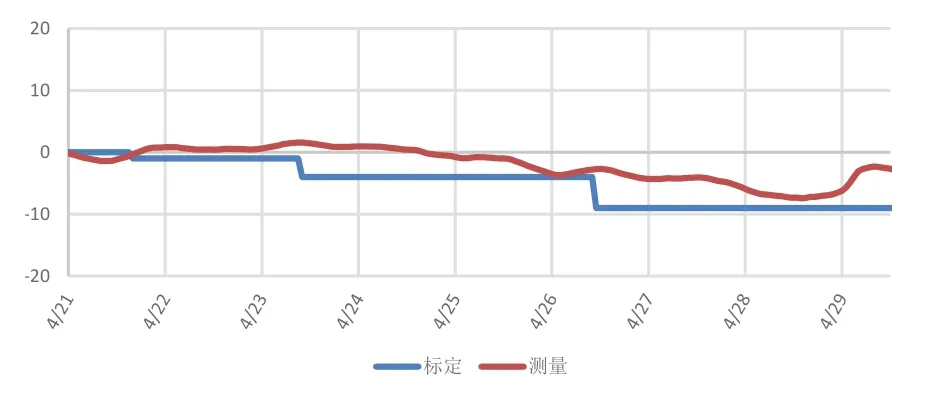
圖8 3 km基站豎直沉降變化曲線
表6和表7分別為3 km基站的水平位移和豎直沉降數據統計情況。在整個標定過程中,水平位移共調整了4次,內符合精度在0.540~2.772 mm,外符合精度在1.000~2.723 mm。豎直沉降共調整了4次,內符合精度在0.340~2.083 mm,外符合精度在1.161~4.884 mm之間。受到雙差殘余誤差影響,3 km基線下監測精度相對1 km基線存在顯著下降,但仍控制在5 mm以內。

表6 3 km基站水平位移統計

表7 3 km基站豎直沉降統計
3.3 實驗結果
通過試驗結果可以看出,北斗三代的定位服務性能已超過GPS,在變形監測中可獲得優于GPS的結果。鐵路監測預警系統采用區域增強、北斗高精度定位、多回路通信、監測預警等多種技術,可協助快速掌握鐵路沿線災害狀況,實現對隱患點地質災害的預測。
4 結束語
本文設計了鐵路北斗三代高精度監測預警系統,解決了鐵路變形監測實時高精度監測和預警問題,為北斗三代系統在鐵路領域的應用提供了重要的思路。未來,本文將繼續研究北斗三代系統在鐵路中的系統應用,探索鐵路北斗增強系統和多源融合監測的新思路,以實現對鐵路隱患進行全覆蓋、高精度、自動化監測的目標。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
云南畫報(2021年12期)2021-03-08 00:50:54
云南畫報(2021年12期)2021-03-08 00:50:28
鐵道通信信號(2020年10期)2020-02-07 01:01:16
鐵道通信信號(2019年1期)2019-03-21 07:37:40
鐵道通信信號(2018年12期)2019-01-31 05:36:36
鐵道通信信號(2018年7期)2018-08-29 01:17:04
中國共青團(2016年8期)2016-11-11 08:22:46
中國社會歷史評論(2016年2期)2016-06-27 07:11:50
通信電源技術(2016年4期)2016-04-04 02:58:04