基于LCL濾波器的交流恒功率負(fù)載優(yōu)化控制研究
2022-08-09 00:53:26劉欣博施俊甫
浙江電力 2022年7期
劉欣博,劉 帆,施俊甫
(北方工業(yè)大學(xué),北京 100144)
0 引言
電力系統(tǒng)中存在著大量電動機(jī)、變換器負(fù)載,這些負(fù)載一般通過閉環(huán)控制的變流器接入母線,當(dāng)輸入電壓有效值變化時,輸入電流有效值也會相應(yīng)調(diào)整,消耗的有功功率不受輸入電壓變化的影響[1-2],具有負(fù)阻抗特性[3-7],會像正反饋一樣放大擾動信號,對系統(tǒng)穩(wěn)定性產(chǎn)生不利影響。例如,當(dāng)系統(tǒng)電壓出現(xiàn)大幅度突變時,這些閉環(huán)控制電動機(jī)、變換器負(fù)載可能造成母線電壓振蕩甚至崩潰,嚴(yán)重影響電力系統(tǒng)的正常運行[8]。
綜上所述,對電力系統(tǒng)穩(wěn)定性造成嚴(yán)重影響的實際上是閉環(huán)控制的電動機(jī)、變換器等實際物理裝置。但是在對電力系統(tǒng)進(jìn)行穩(wěn)定性分析時,由于閉環(huán)控制的電動機(jī)、變換器等實際物理裝置的結(jié)構(gòu)、原理、控制策略非常復(fù)雜,需要對它們進(jìn)行建模,一般以交流恒功率負(fù)載模型來代替實際物理裝置。基于準(zhǔn)確、簡單的交流恒功率負(fù)載模型,可以對含閉環(huán)控制的電動機(jī)和變換器的電力系統(tǒng)進(jìn)行動態(tài)性能和控制策略的優(yōu)化分析。
目前對恒功率負(fù)載模型的研究主要集中在直流系統(tǒng)。文獻(xiàn)[9]提出一種應(yīng)用于源端DC/DC 轉(zhuǎn)換器的復(fù)合控制器,研究恒功率負(fù)載對母線電壓穩(wěn)定性的影響。文獻(xiàn)[10]提出一種適用于恒功率負(fù)載過壓保護(hù)情況下的新型下垂控制,可以控制微電網(wǎng)每個電源電壓的上限,并實現(xiàn)負(fù)載電壓調(diào)節(jié)。文獻(xiàn)[11]為了解決恒功率負(fù)載引起的電壓不平衡問題,設(shè)計了特殊的前饋去耦網(wǎng)絡(luò),簡化了控制系統(tǒng),提高了系統(tǒng)的快速性和抗擾性。文獻(xiàn)[12]將混合模型預(yù)測控制應(yīng)用于恒功率負(fù)載閉環(huán)控制,以調(diào)節(jié)變換器的電壓,但并未考慮模型的準(zhǔn)確性。文獻(xiàn)[13]提出一種單電感雙輸出DC/DC轉(zhuǎn)換器結(jié)構(gòu),開環(huán)實現(xiàn)恒功率負(fù)載的控制,但是其控制方法的可靠性還有待考量。文獻(xiàn)[14]將環(huán)路消除技術(shù)應(yīng)用在不控AC/DC整流器上,以實現(xiàn)自適應(yīng)穩(wěn)定,但是恒功率負(fù)載的等效過于理想化。文獻(xiàn)[15]考慮恒功率負(fù)載在無線電傳輸技術(shù)中的應(yīng)用,提出單個轉(zhuǎn)換器的次級側(cè)控制策略,使直流側(cè)恒功率負(fù)載電壓恒定。
交流恒功率負(fù)載的負(fù)阻抗特性會使系統(tǒng)不穩(wěn)定,其建模方法對于電力系統(tǒng)性能分析和穩(wěn)定控制至關(guān)重要。傳統(tǒng)交流恒功率負(fù)載模型的主電路由PWM(脈沖寬度調(diào)制)整流器連接電阻構(gòu)成,結(jié)構(gòu)非常簡單,通過PWM整流器閉環(huán)控制實現(xiàn)負(fù)載功率可控。絕大部分交流恒功率負(fù)載模型應(yīng)用最簡單的雙閉環(huán)PI(比例積分)控制,當(dāng)調(diào)節(jié)速度較快時超調(diào)比較大,能夠模擬應(yīng)用PI 控制的電動機(jī)和變換器負(fù)載動態(tài)特性。文獻(xiàn)[16]研究有源整流器連接的恒功率負(fù)載提供無功功率的潛力,以及有源整流器引入無功電流控制對系統(tǒng)總體電壓穩(wěn)定性的影響。文獻(xiàn)[17-18]使用DQ 轉(zhuǎn)換方法控制PWM整流器,推導(dǎo)出適用于穩(wěn)定性分析的恒定功率負(fù)載的AC/DC電力系統(tǒng)數(shù)學(xué)模型,但是其控制效果并沒有優(yōu)化。近年來,隨著大功率電動機(jī)動態(tài)性能的要求越來越高,MPC(模型預(yù)測控制)也廣泛應(yīng)用于電機(jī)調(diào)速,與傳統(tǒng)PI控制相比,MPC方法調(diào)節(jié)速度快,超調(diào)小,魯棒性強(qiáng)。傳統(tǒng)PI 控制的交流恒功率負(fù)載模型很難準(zhǔn)確體現(xiàn)應(yīng)用MPC的電動機(jī)負(fù)載的動態(tài)性能[19]。另一方面,PWM整流器的高頻開關(guān)動作會給電源帶來嚴(yán)重的諧波污染[3],為了提高電能質(zhì)量,降低電流諧波,實際電力系統(tǒng)中電動機(jī)、變換器負(fù)載的輸入端通常連接低通濾波器。LCL 型濾波器具有較好的高頻段衰減特性和低頻增益特性,電路結(jié)構(gòu)簡單,在相同濾波效果的情況下可以顯著降低電感值,因而應(yīng)用最為廣泛[20]。
本文結(jié)合傳統(tǒng)PI控制和MPC的優(yōu)勢,提出一種外環(huán)應(yīng)用PI控制、內(nèi)環(huán)應(yīng)用MPC的新型交流恒功率負(fù)載模型,主電路由交流側(cè)帶LCL 濾波器的PWM整流電路與電阻共同構(gòu)成,LCL濾波器根據(jù)電感總量、電容和諧振頻率進(jìn)行設(shè)計。
1 交流恒功率負(fù)載模型
1.1 交流恒功率負(fù)載原理
交流恒功率負(fù)載模型的主電路包括交流側(cè)LCL濾波器、PWM整流器和阻性負(fù)載,如圖1所示。首先建立PWM整流器在靜止abc坐標(biāo)系的開關(guān)函數(shù)模型,通過Park坐標(biāo)變換將abc坐標(biāo)系的非線性模型轉(zhuǎn)化到dq旋轉(zhuǎn)坐標(biāo)系;接著應(yīng)用MPC策略設(shè)計電流內(nèi)環(huán),包括建立預(yù)測模型和評價函數(shù)兩個步驟,通過最小化評價函數(shù)來確定最優(yōu)電壓矢量,從而控制開關(guān)管的導(dǎo)通和關(guān)斷,在電流內(nèi)環(huán)的基礎(chǔ)上確定電壓外環(huán)PI 調(diào)節(jié)器參數(shù)。圖1中:Va、Vb、Vc為交流母線三相電壓;Ia、Ib、Ic為交流三相電流;θ為電網(wǎng)電壓相位;Cdc為直流側(cè)穩(wěn)壓電容;id(k)和iq(k)為dq軸的預(yù)測電流;ω為電網(wǎng)角頻率;ωLid和ωLiq為電感在dq軸的耦合分量;Vd和Vq為交流三相電壓經(jīng)Park坐標(biāo)變換后得到的dq軸電壓分量實際值;Ud和Uq為最優(yōu)電壓矢量;id和iq分別為交流側(cè)濾波電感電流經(jīng)Park變換后得的dq軸電流實際值;idref和iqref為dq軸電流給定值;Vdc和Vqc為直流側(cè)dq軸電壓實際采樣值;Vdcref和Vqcref為直流側(cè)dq軸電壓給定值。

圖1 交流恒功率負(fù)載優(yōu)化控制系統(tǒng)原理
PWM整流器應(yīng)用直流母線電壓外環(huán)、交流側(cè)濾波電感電流內(nèi)環(huán)的雙閉環(huán)控制,該控制策略可維持直流母線電壓恒定,為阻性負(fù)載提供恒定的直流電壓。首先,電壓外環(huán)將Vdc與Vdcref比較,經(jīng)過PI調(diào)節(jié)器后得到有功電流給定值idref。由于整流器工作在單位功率因數(shù)條件下,無功電流給定值iqref=0。將三相交流電流實際值通過abc/dq坐標(biāo)變換,即得到有功電流實際值id和無功電流實際值iq。同理,將三相交流電壓經(jīng)過abc/dq坐標(biāo)變換,分別得到dq軸分量Vd和Vq,以及電感的耦合分量ωLid和ωLiq。將Vd、Vq、ωLid、ωLiq輸入預(yù)測函數(shù)模型,得到每個電壓矢量對應(yīng)的預(yù)測電流id(k)和iq(k),將預(yù)測電流代入評價函數(shù),評價函數(shù)最小值所對應(yīng)的電壓矢量即為最優(yōu)電壓矢量Ud和Uq,進(jìn)行dq/abc 反變換,產(chǎn)生PWM 整流器驅(qū)動信號,控制開關(guān)管的導(dǎo)通和關(guān)斷。
1.2 PWM整流器主電路等效模型
三相PWM整流器拓?fù)淙鐖D2所示,其中:vdc為直流母線電壓;N 為直流母線參考點;RL為負(fù)載電阻;i(jj=a,b,c)為三相電流;e(jj=a,b,c)為三相母線電壓;eL為直流電動勢;R為交流母線等效電阻;L為交流側(cè)濾波電感。當(dāng)直流電動勢eL=0時,直流側(cè)為純電阻負(fù)載,建立采用開關(guān)函數(shù)描述的PWM整流器主電路數(shù)學(xué)模型。

圖2 三相PWM整流器拓?fù)?/p>
對PWM 整流器在abc 靜止坐標(biāo)系進(jìn)行建模,首先定義開關(guān)函數(shù)sj為:

再根據(jù)基爾霍夫電壓定律[21]建立三相回路方程為:

式中:vNO為N點與地之間的電壓。
考慮交流系統(tǒng)為三相電壓、電流對稱系統(tǒng),滿足以下關(guān)系:
對直流側(cè)電容及負(fù)載節(jié)點應(yīng)用基爾霍夫電流定律[21]可得:

上述PWM 整流器主電路數(shù)學(xué)模型是基于abc靜止坐標(biāo)系建立的,包含三相時變交流量,較為復(fù)雜,不利于進(jìn)行下一步分析控制,需通過坐標(biāo)變換,將abc坐標(biāo)系下的三相交流量轉(zhuǎn)化為以電網(wǎng)基波頻率旋轉(zhuǎn)的dq坐標(biāo)系下的直流量,如圖3所示。

圖3 dq旋轉(zhuǎn)坐標(biāo)系和abc坐標(biāo)系
三相靜止abc 坐標(biāo)系到dq同步旋轉(zhuǎn)坐標(biāo)系的變換矩陣為:

將式(7)代入式(2)并化簡,得兩相dq同步旋轉(zhuǎn)坐標(biāo)系中PWM整流器的數(shù)學(xué)模型為:

式中:iL為負(fù)載電流;ed和eq為電網(wǎng)電動勢e的dq軸分量。
在dq旋轉(zhuǎn)坐標(biāo)系中,PWM 整流器主電路可以等效為一個兩端口輸入、單端口輸出的三端口網(wǎng)絡(luò),且符合功率守恒原理,如圖4所示,其中idc為直流側(cè)電流。

圖4 PWM整流器主電路等效模型
1.3 LCL濾波器設(shè)計
電力系統(tǒng)中,PWM 整流器的開關(guān)頻率較高,因此高次諧波比較多,交流側(cè)電能質(zhì)量不理想。為了抑制諧波,提高電能質(zhì)量,需在交流側(cè)加入濾波器[22]。濾波器原理如圖5 所示,其中L1為橋臂側(cè)電感,L2為網(wǎng)側(cè)電感,Cf為交流側(cè)電容。濾波器輸入電壓U(s)與輸出電流I2(s)的傳遞函數(shù)為

圖5 LCL濾波器原理

式中:s為拉普拉斯算子。
圖6 為LCL 濾波器的伯德圖。和L 型濾波器相比,LCL 濾波器在低頻段的增益基本一致,但在高頻段的衰減程度明顯低于L 型濾波器,且濾波器在固定角頻率ωres處存在諧振,諧振角頻率的計算公式為:


圖6 濾波器伯德圖
LCL 濾波器的參數(shù)設(shè)計有4 個限制條件,即總電感量(L1+L2)的上限設(shè)計、濾波電容Cf的上限設(shè)計、諧振頻率fres的上下限設(shè)計、LCL 濾波器電感參數(shù)設(shè)計。
1.3.1 總電感量(L1+L2)的上限設(shè)計

圖7 PWM整流器簡化模型

圖8 穩(wěn)態(tài)運行時PWM整流器電網(wǎng)側(cè)矢量圖
選擇適當(dāng)?shù)碾姼泻椭绷麟妷褐担纯煽刂芇WM整流器運行在矢量圓周的任意一點,在電感L取值一定的情況下,不同電流對應(yīng)不同的圓周。當(dāng)PWM整流器在C點工作時,電感設(shè)計的上限值最小;而當(dāng)PWM 整流器運行于A 點時,電感設(shè)計的上限值最大。設(shè)計時考慮最嚴(yán)重的情況,即PWM整流器工作在C點的情況,可得濾波器總電感取值的上限值范圍為:
式中:Ep為網(wǎng)側(cè)電壓峰值;ILp為電感電流峰值。
1.3.2 濾波電容Cf的上限設(shè)計
在PWM 整流器中,LCL 濾波器的濾波電容值越大,濾除高頻電流的能力就越強(qiáng),產(chǎn)生的無功功率也越多,從而降低了PWM整流器的功率變換能力。因此設(shè)計LCL 濾波器時,需要限制電容產(chǎn)生的無功功率,即要求電容的無功功率不超過系統(tǒng)額定功率的5%,即:

式中:uc為電容電壓;Pn為PWM 整流器的額定功率。
當(dāng)濾波電感的壓降較小時,電容電壓uc可近似為電網(wǎng)電壓un,滿足uc=un,因此可將式(12)轉(zhuǎn)化為:
式中:f為電網(wǎng)頻率。
1.3.3 諧振頻率fres的上下限設(shè)計
關(guān)于讀者是否關(guān)注了圖書館的微信公眾號:調(diào)查結(jié)果為約70%的讀者已關(guān)注,約29%的讀者沒有關(guān)注。已關(guān)注的讀者中約有60%對該微信公眾號的功能和信息表示滿意;約40%的讀者表示不滿意。
不同功率PWM 整流器的開關(guān)頻率也不相同,設(shè)計LCL濾波器的諧振頻率fres時,一方面需要考慮濾波器應(yīng)充分濾除開關(guān)頻率有關(guān)的諧波,另一方面應(yīng)使控制系統(tǒng)具有足夠的控制帶寬和穩(wěn)定裕度。通常可根據(jù)開關(guān)頻率范圍確定LCL 濾波器諧振頻率fres的上下限設(shè)計范圍,即:

式中:fsw為PWM整流器的開關(guān)頻率。
1.3.4 LCL濾波器電感參數(shù)設(shè)計
LCL 濾波器電感包括橋臂側(cè)電感L1和網(wǎng)側(cè)電感L2。橋臂電流紋波過大不僅增大濾波元件損耗,還使功率開關(guān)管承受較高的開關(guān)應(yīng)力,影響PWM整流器的控制。一般將LCL 濾波器的橋臂側(cè)電感L1取得大一些,而網(wǎng)側(cè)電感L2取得小一些,滿足:

式中:γ為網(wǎng)側(cè)電感與橋臂側(cè)電感的比例系數(shù),一般取γ≤0.5。
對于LCL濾波器設(shè)計而言,諧振頻率ωres的表達(dá)式為:

將式(15)帶入式(16),可得:

則橋臂側(cè)電感L1需滿足:

由于LCL 濾波器的網(wǎng)側(cè)電感L2較小,比例系數(shù)γ可取0.2。
2 交流恒功率負(fù)載的控制系統(tǒng)設(shè)計
對于三相交流對稱系統(tǒng),若只考慮交流基波分量,則穩(wěn)態(tài)時dq坐標(biāo)系的dq軸分量均為直流量;另一方面,當(dāng)dq旋轉(zhuǎn)坐標(biāo)系的d軸與電網(wǎng)電動勢矢量E重合時,d軸為有功分量參考軸,q軸為無功分量參考軸,有利于PWM整流器分別控制網(wǎng)側(cè)有功、無功分量(本文中無功分量為0)。
2.1 電流內(nèi)環(huán)PI控制器設(shè)計
將dq坐標(biāo)系以電網(wǎng)電動勢E定向d軸,則PWM整流器dq旋轉(zhuǎn)坐標(biāo)系的模型可簡化為:
式中:p為微分算子。
在同步旋轉(zhuǎn)坐標(biāo)系dq中,d軸以電網(wǎng)電動勢矢量E定向,dq軸變量相互耦合,因此采用前饋解耦控制,vd和vq的控制方程為:

式中:KiP和KiI分別為電流內(nèi)環(huán)的比例系數(shù)和積分系數(shù)。
將式(21)和(22)代入式(19),整理可得:

式(23)表明式(21)和(22)實現(xiàn)了解耦控制,控制框圖如圖9所示。

圖9 電流內(nèi)環(huán)解耦控制結(jié)構(gòu)
本系統(tǒng)令d軸以電網(wǎng)電動勢矢量E定向,因此以iq控制為例設(shè)計控制調(diào)節(jié)器,控制系統(tǒng)暫時不考慮eq的擾動,并將傳遞函數(shù)寫成零極點形式,解耦后的iq電流內(nèi)環(huán)控制框圖如圖10所示。

圖10 id控制框圖
圖10中,Ts為電流內(nèi)環(huán)采樣周期,KPWM為橋路PWM 等效增益。按典型I 型系統(tǒng)設(shè)計,令τi=L/R即可以PI 調(diào)節(jié)器零點抵消電流控制對象傳遞函數(shù)極點。以此方法所得電流內(nèi)環(huán)的開環(huán)傳遞函數(shù)為:

求解可得電流內(nèi)環(huán)PI 控制參數(shù)KiP和KiI的計算公式為:

2.2 電流內(nèi)環(huán)MPC設(shè)計
MPC 設(shè)計步驟包括建立預(yù)測模型和使評價函數(shù)最小化,從而選擇最優(yōu)的開關(guān)狀態(tài),對控制目標(biāo)的性能進(jìn)行優(yōu)化。MPC的核心在于評價函數(shù)的設(shè)計,通過評價函數(shù)選擇最優(yōu)電壓矢量,即分別計算8個電壓矢量對應(yīng)的評價函數(shù)值,選取評價函數(shù)最小值所對應(yīng)的電壓矢量作為最優(yōu)電壓矢量,控制PWM整流器開關(guān)管的導(dǎo)通和關(guān)斷。
若忽略線路電阻R,同步旋轉(zhuǎn)dq坐標(biāo)系下PWM整流器模型方程滿足:

式中:ed=E,eq=0。
當(dāng)開關(guān)頻率足夠高時,電感電流微分形式可近似為:

式中:(ik)為kTs時刻電流預(yù)測值。
將式(29)帶入式(28),并將離散時間向前推導(dǎo),可得:
定義評價函數(shù)為:

式中:idref(k+1)和iqref(k+1)為(k+1)Ts時刻dq軸的電流參考值,可由電壓外環(huán)計算得到。由于d軸以電網(wǎng)電動勢矢量E定向,iqref(k+1)=0。
在每個采樣周期內(nèi),根據(jù)參考電流所處的工頻半周,將8個開關(guān)狀態(tài)對應(yīng)的電流預(yù)測值分別代入式(31)滾動尋優(yōu),選取評價函數(shù)J最小時對應(yīng)的電流預(yù)測值作為最優(yōu)預(yù)測值,實現(xiàn)電流跟蹤控制。依據(jù)評價函數(shù)式(30)和(31)選取最優(yōu)電流矢量id、iq,再返回式(28)得到最優(yōu)電流矢量對應(yīng)的最優(yōu)電壓矢量ud和uq,經(jīng)dq/abc 坐標(biāo)反變換得到ua、ub、uc,從而控制PWM 整流器開關(guān)管的導(dǎo)通和關(guān)斷。電流內(nèi)環(huán)MPC算法流程如圖11所示。

圖11 電流內(nèi)環(huán)模型預(yù)測算法流程
2.3 電壓外環(huán)PI控制器設(shè)計
電壓外環(huán)控制的目的是穩(wěn)定直流側(cè)電壓vdc。網(wǎng)側(cè)三相電壓與三相電流分別為:

式中:Im為交流側(cè)相電流幅值;Em為交流側(cè)電網(wǎng)電壓幅值。
變換器開關(guān)頻率遠(yuǎn)高于電網(wǎng)基波頻率,因此只考慮開關(guān)函數(shù)的低頻分量,則有:

式中:m為PWM的調(diào)制比,m≤1。
此時直流側(cè)電流可表示為:

將式(33)、(34)代入式(35),化簡可得:

電壓外環(huán)簡化后的控制框圖如圖12所示。

圖12 電壓外環(huán)控制框圖
圖12中,Tv為電壓外環(huán)PI調(diào)節(jié)器參數(shù)。為簡化控制結(jié)構(gòu),將電壓采樣小慣性時間常數(shù)τv與電流內(nèi)環(huán)等效時間常數(shù)3Ts合并,即Tev=τv+3Ts。考慮到電壓外環(huán)的抗干擾性,將其設(shè)計成二階系統(tǒng),由圖12可得開環(huán)傳遞函數(shù)為:

式中:KvP為電壓環(huán)比例系數(shù)。
電壓環(huán)中帶寬hv滿足:

可得到電壓外環(huán)PI調(diào)節(jié)器控制方程為:

式中:vdref為直流側(cè)電壓給定值。
接著,由二階系統(tǒng)控制器參數(shù)整定關(guān)系[23]可得:

綜合考慮電壓外環(huán)的抗干擾能力及跟隨性,取帶寬hv=5,Tv=5Tev=5(τv+3Ts),代入式(40)可得:

當(dāng) 取τv=3Ts時,Tv=5Tev=5(τv+3Ts)=20Ts,為與KvP形式一致,令電壓環(huán)積分系數(shù)KvI=Tv,即:

電壓外環(huán)PI調(diào)節(jié)器輸出電流給定值idref,作為電流內(nèi)環(huán)的參考值。
3 仿真分析
應(yīng)用MATLAB-Simulink 仿真軟件進(jìn)行仿真驗證。為了驗證本文設(shè)計的交流恒功率系統(tǒng)模型采用電壓外環(huán)PI 控制、電流內(nèi)環(huán)MPC,比電壓、電流雙PI 控制具有更強(qiáng)的魯棒性和穩(wěn)定性,搭建兩種控制電路進(jìn)行對比;為了驗證交流側(cè)具有較高的波形質(zhì)量,搭建主電路為LCL 濾波器連接PWM整流器的等效電路。
3.1 恒功率負(fù)載主電路仿真模型搭建
圖13 為交流恒功率負(fù)載的主電路模型,交流電網(wǎng)通過LCL 濾波器與PWM 整流器相連,電流經(jīng)整流器由交流變?yōu)橹绷鳎绷鱾?cè)負(fù)載由電阻等效且并聯(lián)電容進(jìn)行穩(wěn)壓,整個系統(tǒng)可以視為交流恒功率負(fù)載接在電網(wǎng)中。系統(tǒng)的初始環(huán)境為:交流系統(tǒng)母線的相電壓有效值220 V、峰值311 V,電網(wǎng)頻率50 Hz,交流恒功率負(fù)載的額定功率Pn為5 800 W,PWM 整流器開關(guān)頻率fsw為20 kHz,直流電壓vdc為800 V,峰值電壓Ep為311 V,電感電流峰值ILp為16 A。t=1 s 時交流母線相電壓峰值由311 V升至367 V,模擬系統(tǒng)大擾動條件。

圖13 交流恒功率負(fù)載主電路仿真模型
由式(11)計算得到總電感量?需滿足L1+L2≤1.1×10-2H;將PWM整流器額定功率Pn以及電容電壓uc的值帶入式(13),可得濾波器電容Cf≤2×10-6F,選擇濾波電容為0.2μF;電網(wǎng)頻率f=50 Hz,PWM 整流器開關(guān)頻率fsw=10 kHz,基于式(14)可得諧振頻率fres的范圍,選擇fres=2 kHz;最后分別計算橋臂側(cè)電感L1和網(wǎng)側(cè)電感L2,由式(15)和(18)可得橋臂側(cè)電感L1=0.5 mH,網(wǎng)側(cè)電感L2=0.2 mH。
3.2 恒功率負(fù)載控制電路搭建
系統(tǒng)的電壓外環(huán)控制均采用PI 控制,依據(jù)PWM整流器基本電路模型以及式(41)和(42),可得電壓外環(huán)比例調(diào)節(jié)系數(shù)KvP=0.5,積分調(diào)節(jié)系數(shù)KvI=3.5。當(dāng)電流內(nèi)環(huán)采用PI控制時,系統(tǒng)的控制電路模型如圖14所示。

圖14 電流內(nèi)環(huán)為PI控制時的控制電路模型
當(dāng)電流內(nèi)環(huán)采用MPC時,系統(tǒng)的控制電路模型如圖15 所示。電流內(nèi)環(huán)控制通過式(21)和(22)可得到最佳預(yù)測電流,最終選取最優(yōu)電壓矢量ud、uq對應(yīng)的開關(guān)狀態(tài),控制PWM整流器開關(guān)管的導(dǎo)通和關(guān)斷。
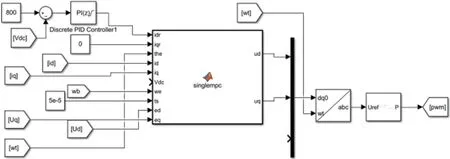
圖15 電流內(nèi)環(huán)為MPC時的控制電路模型
建立的交流恒功率負(fù)載系統(tǒng)參數(shù)如表1所示。

表1 系統(tǒng)仿真參數(shù)
根據(jù)表1 中的交流恒功率負(fù)載模型的系統(tǒng)參數(shù),對系統(tǒng)的恒功率特性以及內(nèi)環(huán)采用MPC對比PI 控制的動態(tài)優(yōu)勢進(jìn)行仿真驗證。首先在對系統(tǒng)的恒功率特性以及可以實現(xiàn)穩(wěn)定控制進(jìn)行仿真驗證時均采用MPC。初始時刻交流母線電壓輸入有效值給定值為327 V,系統(tǒng)穩(wěn)定運行且直流側(cè)負(fù)載電壓能穩(wěn)定控制在給定值800 V,功率恒定,交流側(cè)輸入功率也保持恒定。在t=1 s時將交流母線的電壓從311 V升至367 V,根據(jù)功率計算公式,本系統(tǒng)可認(rèn)為功率因數(shù)為1,交流側(cè)輸入電壓有效值上升,輸入電流的有效值需相應(yīng)調(diào)整下降,才能滿足功率恒定。為了更直觀地表現(xiàn)交流恒功率負(fù)載的負(fù)阻抗特性,將交流側(cè)電壓和電流經(jīng)Park 變換后從d軸采樣,即以有效值的形式表示,如圖16所示。可以看出,此模型是準(zhǔn)確的。

圖16 交流側(cè)電壓、電流有效值
圖17 為內(nèi)環(huán)采用MPC 與內(nèi)環(huán)采用PI 控制的直流側(cè)電壓曲線對比。可以看出,內(nèi)環(huán)采用MPC時,直流側(cè)電壓可以更快達(dá)到給定值,并且超調(diào)明顯更小。

圖17 直流側(cè)負(fù)載電壓對比
圖18 為內(nèi)環(huán)采用MPC 和內(nèi)環(huán)采用PI 控制的直流側(cè)功率曲線對比。當(dāng)t=1 s 系統(tǒng)發(fā)生突變時,功率曲線均在母線電壓突變之后短暫波動,并很快恢復(fù)到初始狀態(tài)。經(jīng)比較可得,當(dāng)t=1 s系統(tǒng)發(fā)生突變時,采用MPC的系統(tǒng)魯棒性更強(qiáng)且恢復(fù)速度更快。
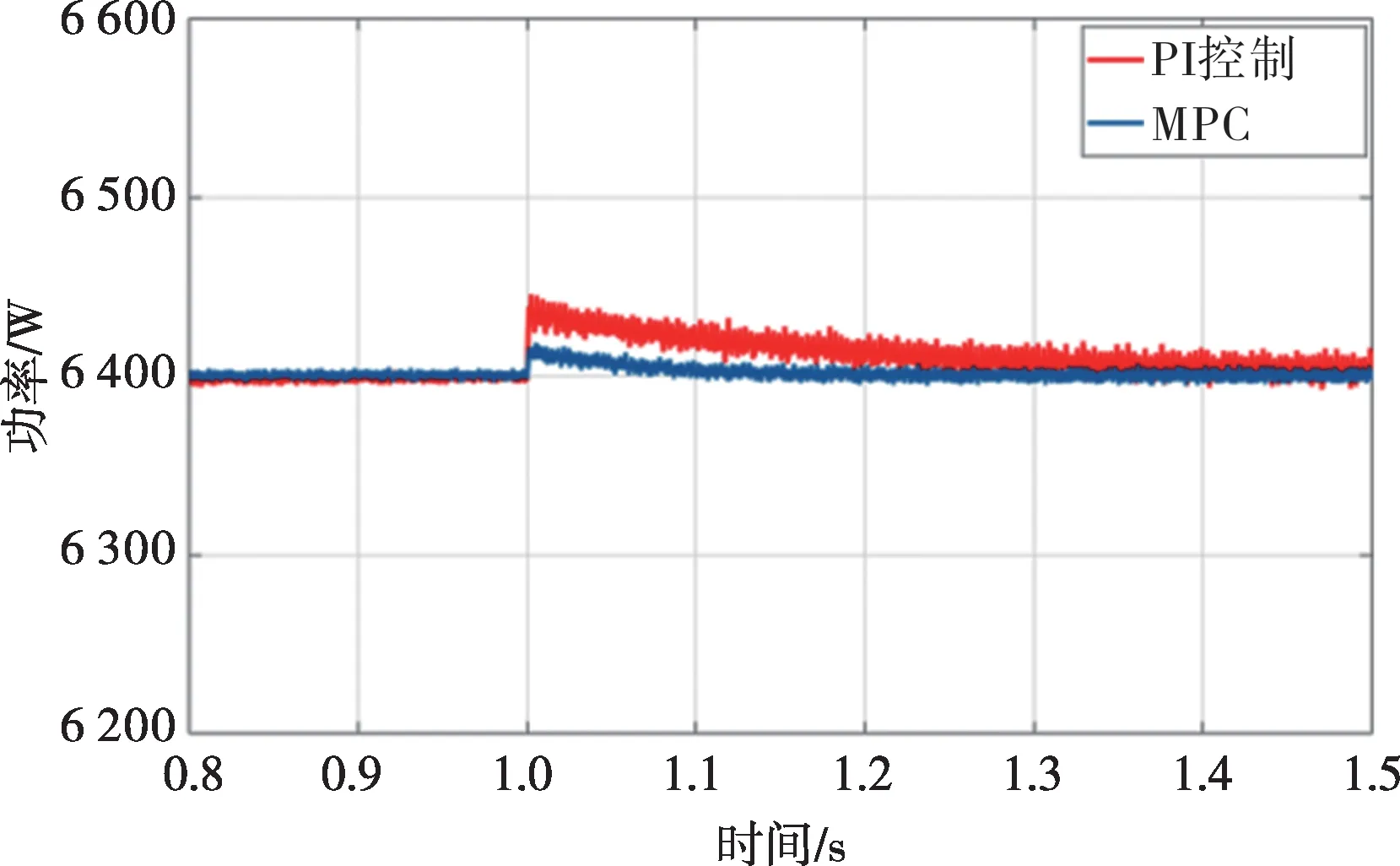
圖18 直流側(cè)負(fù)載功率對比
交流側(cè)電流波形如圖19 所示。可以看出,相較于傳統(tǒng)LC 濾波裝置,采用LCL 濾波裝置時交流側(cè)電流的波形質(zhì)量明顯更好。

圖19 交流側(cè)電流波形
圖20 給出了交流電流諧波分量,可以看出,采用傳統(tǒng)LC濾波裝置時交流側(cè)電流諧波分量達(dá)到18.44%,而采用LCL濾波裝置時交流側(cè)電流諧波分量只有2.6%,THD(總諧波畸變率)小于5%,波形質(zhì)量更好。
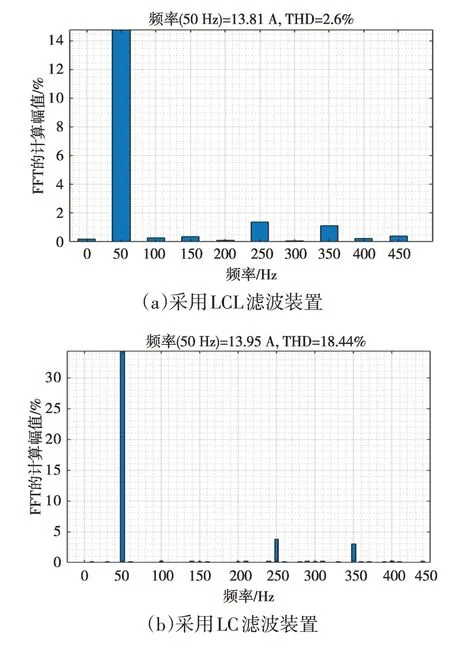
圖20 交流側(cè)電流諧波分量
4 結(jié)語
本文分別對濾波器和控制策略進(jìn)行優(yōu)化,基于PWM 整流器、電阻和LCL 濾波器,結(jié)合傳統(tǒng)PI控制和MPC的優(yōu)勢,提出一種電壓外環(huán)控制應(yīng)用PI調(diào)節(jié)器、電流內(nèi)環(huán)應(yīng)用MPC、主電路設(shè)計加入LCL 型濾波器的交流恒功率負(fù)載模型。仿真結(jié)果表明:在物理層面,根據(jù)電感總量、電容和諧振頻率設(shè)計的LCL 濾波器能夠有效抑制交流側(cè)電流諧波失真,提高電能質(zhì)量;在控制算法層面,所提控制模型通用性強(qiáng)、動態(tài)響應(yīng)快、超調(diào)較小、魯棒性強(qiáng),能夠準(zhǔn)確體現(xiàn)高性能電動機(jī)的動態(tài)特性,為電力系統(tǒng)動態(tài)性能分析提供必要保障。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科教新報(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
海峽姐妹(2020年8期)2020-08-25 09:30:18
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12
