基于AlphaPose與REBA的手工搬運作業姿勢風險評估方法*
2022-08-10 09:47:54鄭穎琇陳再勵何華剛
中國安全生產科學技術 2022年7期
陳 星,常 原,鄭穎琇,陳再勵,何華剛
(中國地質大學(武漢)工程學院,湖北 武漢 430074)
0 引言
與工作相關的肌肉骨骼疾病(Work-related Musculoskeletal Disorders,WMSDs)是一類職業性的慢性累積性疾患,是目前備受關注的職業健康問題之一[1]。WMSDs涉及各行各業,患病率較高,嚴重影響工人的生活質量,其中重復作業、不舒適的姿勢、搬運、舉重[2]均是導致WMSDs的主要原因。人工搬運作業[3]廣泛存在于生產生活中,在建筑施工傷害中,因WMSDs造成的傷害占比大于37%[4],且大部分因人工搬運作業導致。WMSDs癥狀包括腰痛、頸、肩痛等,在各行業中搬運作業人群患病情況極為嚴重,主要癥狀常見于人體軀干的上肢和下背部區域[5-6]。據統計,從事手工搬運作業的工人中,有25%的工人存在背疼癥狀,23%的工人存在肌肉疼痛癥狀,WMSDs呈高發態勢[7-8]。
評估工人作業姿勢常用方法主要有自我評價法、直接測量和觀察性評估[9]。自我評價法通過對工作日記、訪談、問卷的分析,收集工作場所對工人的不利因素;直接測量法通過試驗對象在工作時附著人體傳感器,收集工人的肌肉骨骼數據和運動角度,傳感器主要由運動捕捉系統、腦電圖儀和運動傳感器[10]組成。自我評價法簡單易行,但主觀性較強,只提供最終的疲勞狀態,不適用于建筑工人身體疲勞的調查。直接測量法在作業過程中可能中斷正常工作活動,影響參與者試驗過程中的生理和心理表現。針對人體數據收集,一般采用將職業安全與健康從業人員要求相結合的方式,但在建筑制造業中存在較大局限性。而觀察性評估方法允許工人在工作過程中不受干擾地進行觀察,可為人體工程學風險評估提供精確、準確的結果。
計算機視覺技術在安全風險防控方面的應用比較廣泛[11],本文采用人體姿態識別AlphaPose模型檢測作業姿勢,根據關節點的位置坐標信息計算關節角度,依據快速全身評估方法(Rapid Entire Body Assessment,REBA)[12]評分規則,評估搬運作業姿勢風險大小,便于及時修正工人的高風險動作,預防職業性肌肉骨骼疾患。該方法通過非接觸式對采集視頻進行識別檢測,可計算視頻中每一幀的骨骼信息、關節夾角、REBA評分情況以及該動作風險程度,評估過程中不影響正常作業過程,可廣泛應用于作業現場。
1 AlphaPose模型與REBA方法
1.1 人體姿態識別AlphaPose模型
AlphaPose為分階段檢測模型[13],采用自頂向下的方法,利用目標檢測算法檢測人體,通過單人姿勢估計(Single Person Pose Estimation,SPPE)算法對檢測到的人體進行姿態估計,選取18個關鍵關節點構建人體骨架結構,骨骼關節點檢測示意如圖1所示。
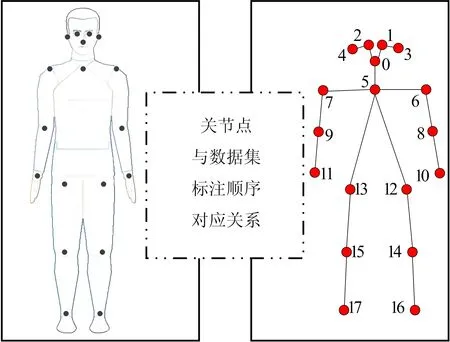
注:0-鼻子;1-左眼;2-右眼;3-左耳;4-右耳;5-肩中心;6-左肩;7-右肩;8-左手肘;9-右手肘;10-左手腕;11-右手腕;12-左臀部;13-右臀部;14-左膝蓋;15-右膝蓋;16-左腳踝;17-右腳踝
針對已有骨骼模型存在2個主要問題:定位錯誤和產生冗余檢測結果[14]。AlphaPose模型添加3個模塊:對稱空間變換網絡(Symmetric Space Transformation Network,SSTN)、姿態引導的樣本生成器(Pose-guided Proposals Generator,PGPG)與姿態非極大值抑制器(Parametric Pose Non-Maximum Suppression,PPNMS)。SSTN通過自動調整檢測框使目標檢測結果更準確;PGPG對已有數據進行姿態引導擴充,達到數據增強目的;PPNMS通過定義姿態距離計算姿態相似度,可消除冗余的檢測框,實現更精確的姿態識別與骨骼關節點檢測。在MPII數據集上對模型進行訓練,保證算法的檢測精度滿足試驗要求,采用AlphaPose對人體關節點進行檢測,得到18個骨骼關節點在每幀圖像中的坐標(x,y),進而計算出該幀圖像人體各個關節的夾角。
1.2 快速全身評估方法(REBA)
REBA方法于2000年由Hignett等研發,廣泛應用于制造業、農業等行業的肌肉骨骼疾患評估。其基本原理是通過檢測作業行為中的6種身體關節角度(軀干、上臂、下肢、頸部、下臂、手腕)以及3種影響因素(負荷、抓握、活動頻率),對照評分表[12]獲得相應分數,累計相加得到總分,分值高低代表該作業姿勢的危害程度大小。
REBA方法評估流程如圖2所示。分數查詢表A~C具體見文獻[12],且分數A由表A得出,分數B由表B得出,分數A與負荷分數之和得到分數C,分數B與抓握工具分數之和得到分數D,分數C與分數D共同得到表C,并最終得到分數E,最終結合活動頻率分數(現在所進行的動作頻率)得到作業姿勢的REBA總分。在搬運過程中搬運動作的頸部和手腕2個部位處于相對靜止狀態,為排除非必要部位影響,將頸部及手腕在試驗動作中的夾角限制為特定范圍。根據REBA得分情況,基于表1中REBA與風險水平的對應關系,評估搬運作業姿勢的風險等級。
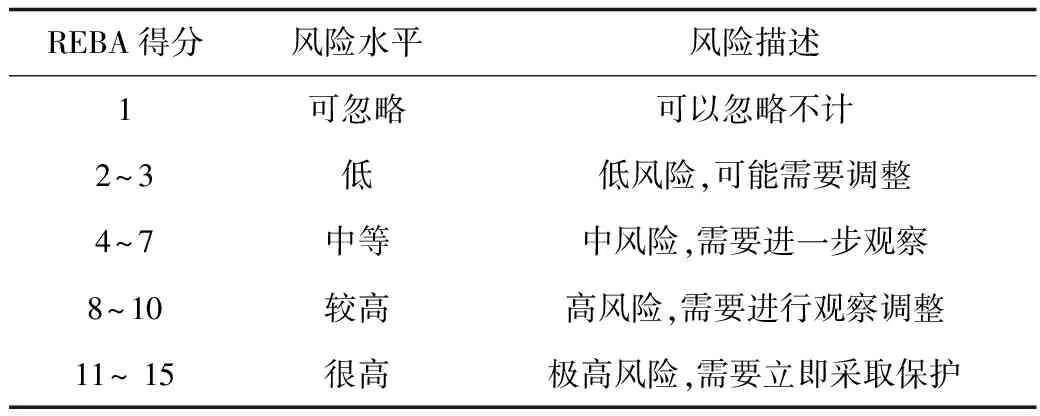
表1 REBA總分與風險等級
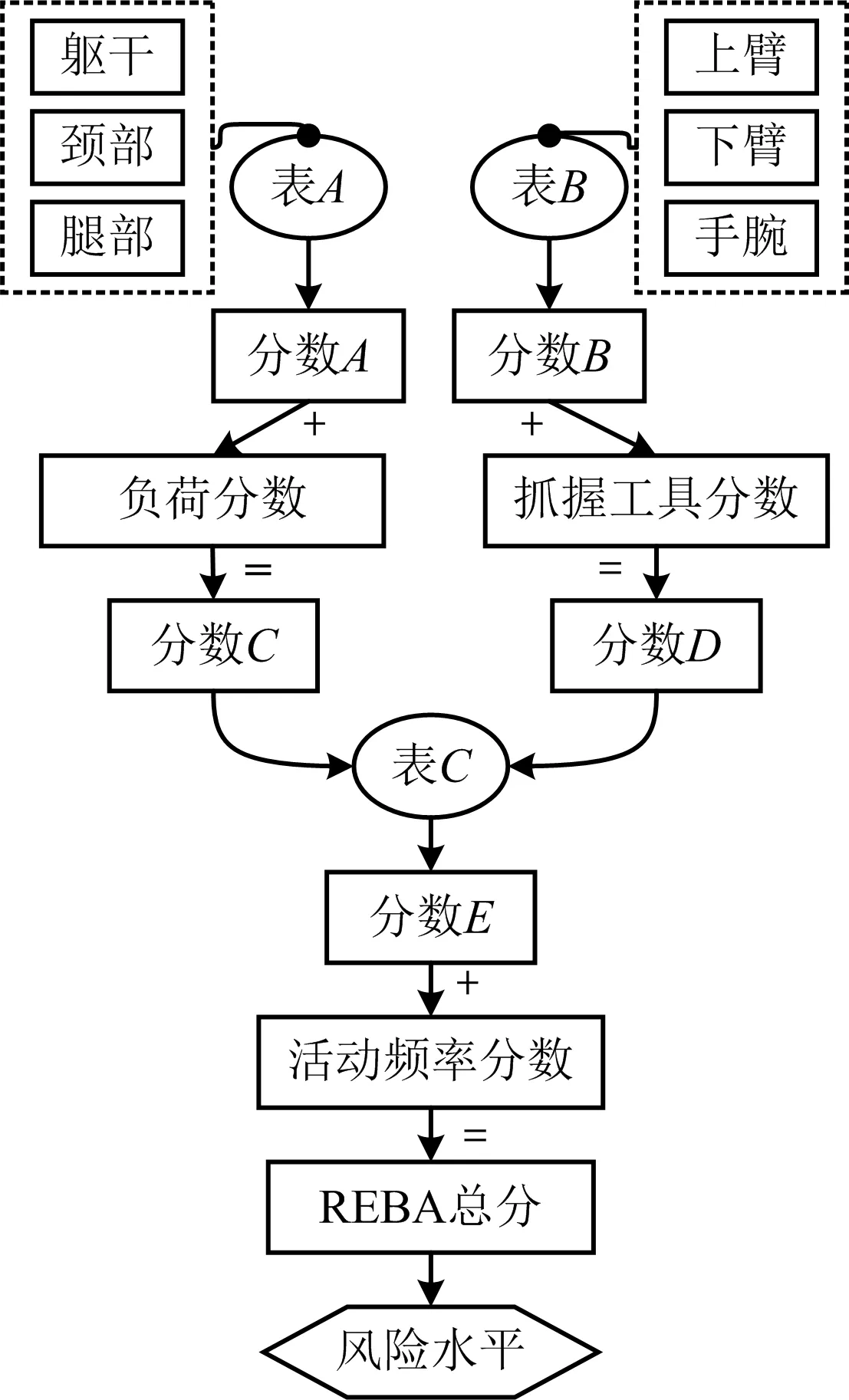
圖2 REBA評估流程
負荷分數、抓握分數與活動頻率分數是試驗前設定的先驗條件,需要在程序運行前作為已知變量進行手動設定。通過將AlphaPose模型與REBA方法結合,避免角度觀測與人工打分的主觀性,簡化中間處理過程,結果以圖表的形式輸出,更加直觀地針對視頻動作進行分析評估,可準確檢測人體骨骼框架,自動連續評估研究對象動作,評估效率高。
本文選取常見手工搬運作業作為研究對象,在試驗室進行視頻采集與數據分析工作。
2 手工搬運作業姿勢風險分析
2.1 搬運作業WMSDs影響因素分析
人工搬運作業廣泛存在于建筑和土木工程領域,施工工人一般從事搬運物料等高強度作業,具有連續性和重復性,作業過程中可能因為姿勢不當、物料過重、長時間勞動等原因引起身體不適,導致WMSDs風險增加[15],其中最常見的是背傷,事故發生原因主要是人們對背部安全缺乏重視。依據《生產過程危險和有害因素分類與代碼》(GB/T 13861—2009)[16],結合近年關于WMSDs的問卷調查結果,篩選搬運作業可能導致WMSDs的因素,分析手工搬運作業WMSDs主要影響因素,如圖3所示。

圖3 手工搬運作業WMSDs影響因素
WMSDs的影響因素主要體現在人、物、環境、管理4個方面。人的因素包括生理(年齡、身高及體質等)和心理(情緒壓力等)因素,通常搬運工齡越長,患病概率越大;動作的實現都要經過自身心理過渡,消極的情緒可能會導致工作被動、效率下降,甚至產生不安全行為。物的因素主要包括物料重量、物料可抓握性,物料過重導致工人重體力負荷作業;可抓握性小、作業空間狹小,可能導致工人采用不良的搬運姿勢。環境因素中,工人所處環境決定工作效率與安全性,應盡量減少在惡劣天氣下的工作時間,長時間工作導致工人操作能力下降,更容易疲勞。管理因素中應堅持“安全第一、預防為主、綜合管理”的原則,提高工人安全防護意識,確保個體防護到位,有輕癥及時處理,搬運作業姿勢培訓尤為重要,可從根本上降低WMSDs發生概率。
不良的搬運作業姿勢是手工搬運作業WMSDs最為重要的影響因素,其它因素都直接或間接導致不良作業姿勢的產生,進而導致WMSDs患病概率增大。手工搬運作業目前主要管控方法為現場安全督察,包括個體安全防護、突發情況應急等,不能自動實時評估工人作業姿勢的風險大小,不能現場快速評判動作姿勢的危險性并及時提出改善意見。
2.2 手工搬運作業姿勢分析
通過實地調研、問卷調查及專家訪談等方式,總結手工搬運物料常規動作流程如圖4所示,首先觀察貨物具體情況,不能提取超過自己承受重量的物品;靠近貨物采取屈膝下蹲的姿勢,背部挺直提取貨物;提取貨物時腿部用力,身體微向前傾貼近貨物,貨物重的一側靠近身體,不要扭動身體以免拉傷,緩慢起身;將貨物放到指定位置,放下與提取順序相反。
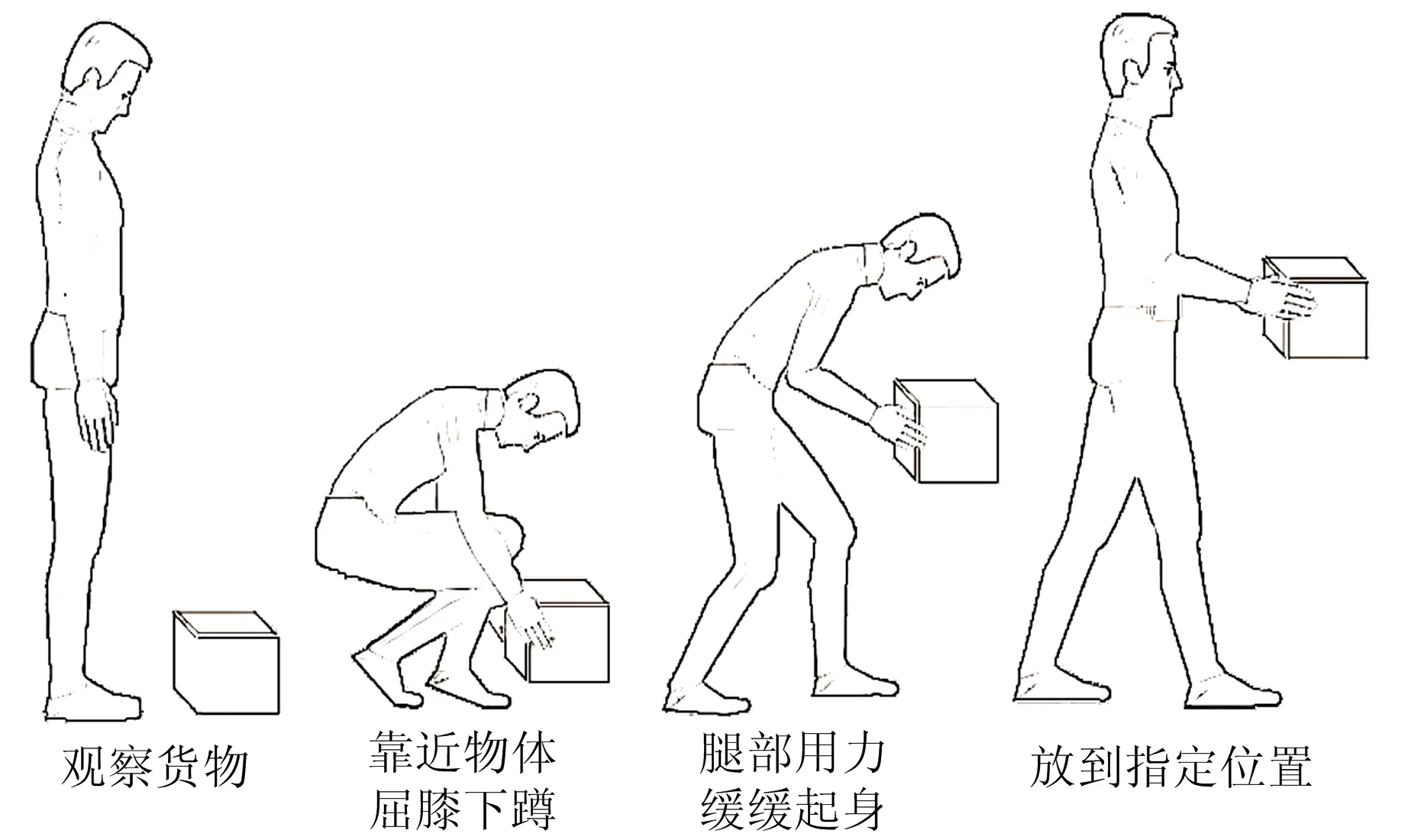
圖4 手工搬運重物動作流程
搬運過程中經常出現的問題包括搬運的物品較重、采取錯誤的搬運動作、將物品從地面抬起時迅速扭轉身體、搬運物品時物品距離身體過遠、僅用身體一側承受重物等。工人搬運動作不當是導致WMSDs的主要原因,下蹲拾取物品過程中最容易出現問題,應采取屈膝蹲坐的姿勢保持背部挺直,但大部分工人一般彎腰直腿搬運重物,會加重背部肌肉負擔。本文從人體工效率學角度對2種取物動作進行分析,討論其導致職業性肌肉骨骼疾患的風險大小。
2.3 作業姿勢風險評估框架構建
利用AlphaPose模型與REBA方法,構建手工搬運作業的WMSDs風險評估框架,如圖5所示。將REBA的評分內容應用于骨骼數據處理階段,對姿勢的最終總得分進行風險分級,實現輸出關節夾角的同時輸出身體各部位REBA的總得分,生成隨視頻圖像幀數不斷變化的關節夾角、REBA總分以及作業姿勢風險等級曲線圖。經過實地考察發現,搬運動作的頸部和手腕處于相對靜止狀態,將3種預先輸入變量(負荷、活動頻率、手握工具)暫定為0,試驗動作為搬運重物的行為。作業姿勢風險評估框架主要由4部分組成,即圖像和數據采集、基于AlphaPose的人體骨骼識別、基于REBA方法的作業姿勢風險計算以及人體工效學風險評估報告生成。后續對評價過程進行詳細討論,主要包括計算人體姿態角度、REBA評分和確定WMSDs風險等級3個方面。
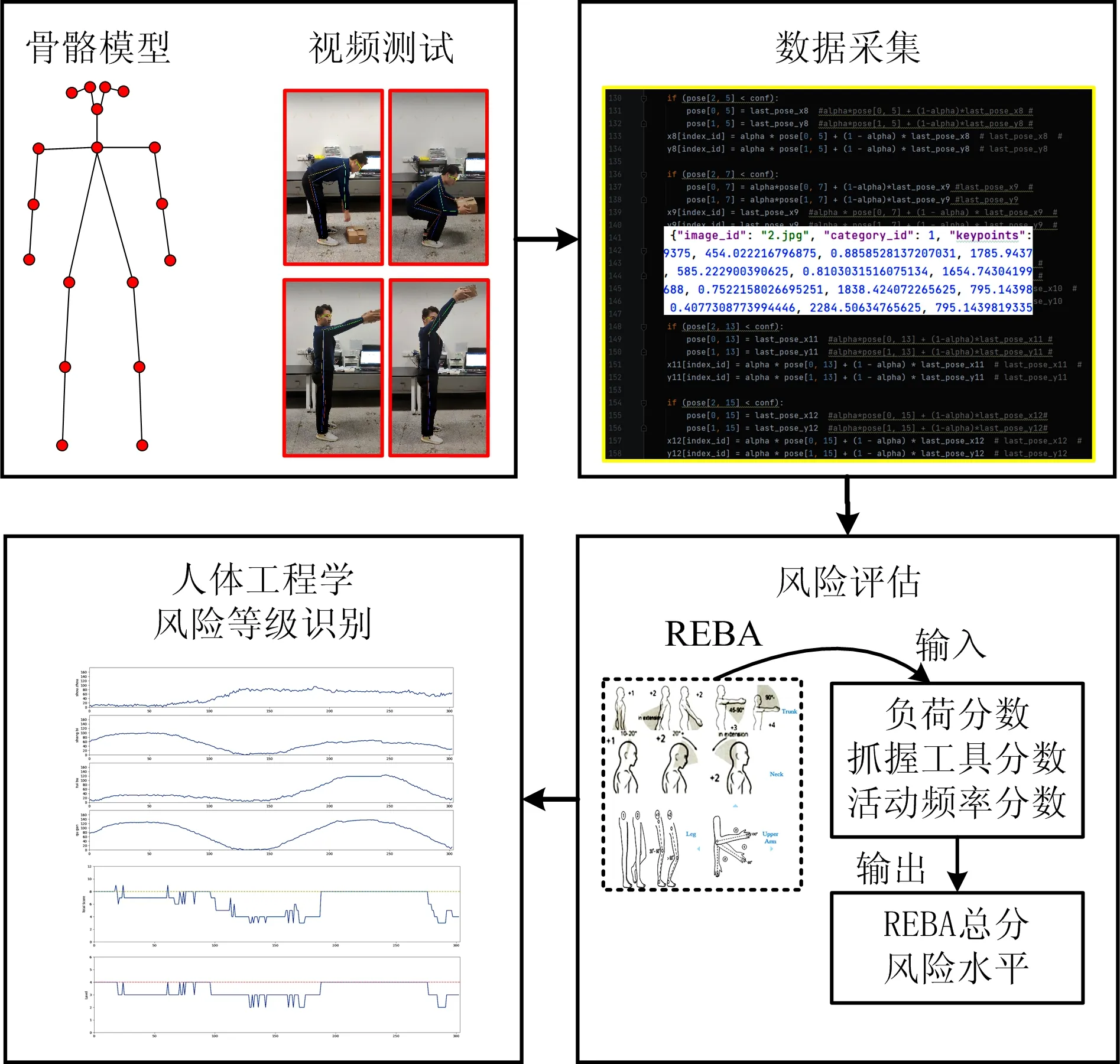
圖5 手工搬運作業WMSDs風險評估框架
3 人體關節點數據處理
3.1 關節夾角計算
因為人體姿態識別模型輸出的是人體18個骨骼關節點的空間相對坐標及置信度,關節點位置坐標不能直接輸入REBA,需要將坐標信息轉換為對應部位的身體姿勢角度。相鄰2個關節點可構成對應的肢體結構,采用空間向量的方法進行計算。
(1)
式中:θLE表示左臂肘關節角度,(°);L1表示左下臂關節向量長度;L2表示左上臂關節向量長度。
考慮到人體對稱結構,上下臂及腿部關節角度分別為左右2組,結合REBA評分原則,為精確進行評分確定作業姿勢風險,取身體左右對應部位的關節夾角最大值,如式(2)所示:
θ=max[θL,θR]
(2)
式中:θ表示身體關節角度,(°);θL為左側身體關節角度,(°);θR為右側身體關節角度,(°)。
3.2 數據濾波處理
加權濾波法(Savitzky Golay,SG)的核心思想是對窗口內的數據進行加權濾波,加權權重是對給定的高階多項式進行最小二乘擬合得到[16]。經過SG濾波處理后,可有效保留數據變化信息,同時消除數據突變。SG計算原理如下:
對當前時刻前后共2n+1個觀測值進行濾波,用k-1階多項式進行擬合,如式(3)所示:
xt=a0+a1t+a2t2++ak-1tk-1
(3)
式中:t表示某時刻;xt表示t時刻的觀測值;a0,a1,…ak-1表示參數,通過最小二乘法確定。
同理,對于前后時刻的預測值用式(3)進行計算,共得到2n+1個式子,構成矩陣,矩陣簡化后如式(4)所示:
X(2n+1)×1=T(2n+1)×k+Ak×1+E(2n+1)×1
(4)
式中:X(2n+1)×1表示2n+1行1列的矩陣X;T(2n+1)×k表示2n+1行k列的矩陣T;Ak×1表示k行1列的矩陣A;E(2n+1)×1表示2n+1行1列的矩陣E。
通過最小二乘法求得A(k×1)的解如式(5)所示:
A=(Ttrans·T)-1·Ttrans·X
(5)
式中:上標trans表示轉置;()-1表示矩陣的逆矩陣。
模型的濾波值如式(6)所示:
P=T·A=T·(Ttrans·T)-1·Ttrans·X=B·X
(6)
式中:P表示模型濾波值;B表示關系矩陣。
最終得到濾波值與觀測值的關系矩陣,如式(7)所示:
B=T·(Ttrans·T)-1·Ttrans
(7)
通過計算B矩陣就可以將觀測值轉換為濾波值。
比對施工現場常見搬運動作,將其分解成相關度較高的3個動作即下蹲、小臂屈曲、手臂抬升,針對動作活動最頻繁的4個關節(上臂、下臂、軀干、腿部)進行分析。考慮到視覺偏差及視頻遮擋對結果的影響,對下臂肘關節進行測試,拍攝肘關節的規則運動如圖6所示,將原始數據曲線與 SG平滑濾波處理后的數據曲線進行對比分析。

圖6 肘關節規則運動
肘部關節夾角運動范圍為20°~150°,角度變化序列如圖7所示,雖然曲線變化趨勢符合預期效果,但經過局部放大可以發現,夾角波動存在突變。經SG濾波處理后的關節變化曲線可以直觀看出角度變化的曲線更符合人體運動規律,過渡更加平滑,沒有明顯突變。
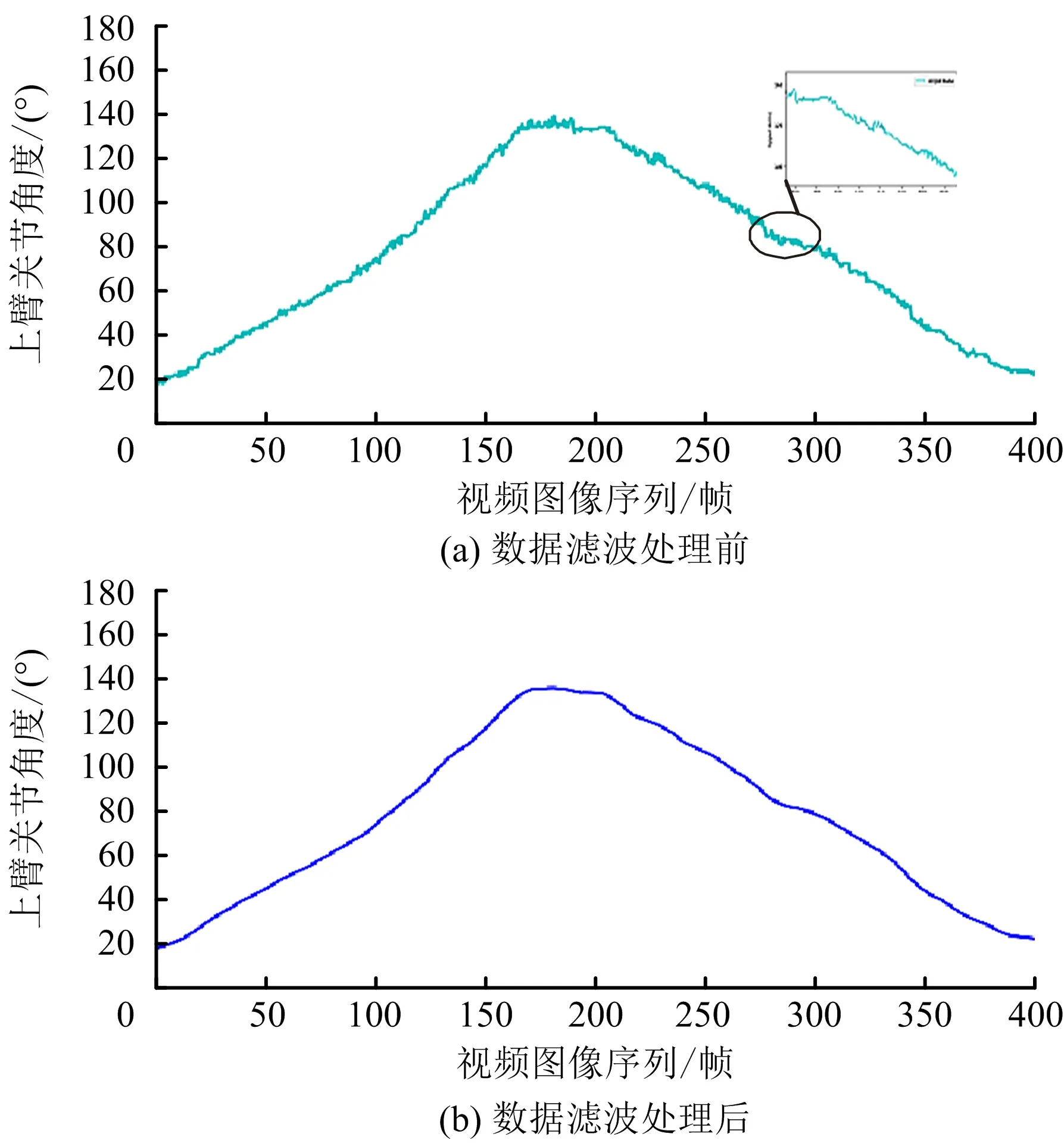
圖7 肘關節運動角度序列
綜上,算法提取的人體骨骼框架和視頻中人體的耦合度較高,經過人工測量驗證,算法計算精度與實際夾角差距可忽略不計。關節夾角的評分依據REBA方法,每個關節的分級跨度均較大,對于關節實際角度和算法計算角度在10°以內是可以接受的,對最終的評判結果影響較小。
4 試驗分析
在試驗室對工人搬運動作進行分階段測試,測試試驗對象完成拿起重物的行為,試驗物品采用重量為500 g的長方形物塊。試驗第1階段是經過專家調查證明該動作具有一定骨骼肌肉疾患風險的彎腰直腿取物;第2階段是正常屈膝下蹲拾取物品,如圖8所示。

圖8 典型搬運姿勢測試
試驗共采集到312幀圖像,對采集的視頻進行作業姿勢評估。試驗對象身體主要部位夾角變化如圖9所示。由圖9可知,在第1階段,彎腰直腿俯身取物的軀干夾角和腿部夾角變化不同步,而第2階段的2個關節同步變化且角度相差甚較小。腿部和軀干夾角有明顯相關聯系,可應用于施工現場監測視頻,判斷監測對象進行搬運動作拿起時,是否有不舒適姿勢的出現。

注:散點表示由原始數據計算每一幀圖像的關節夾角;實線表示經濾波處理后的夾角變化曲線
作業姿勢REBA得分如圖10所示。經SG濾波平滑處理的數據,避免因角度范圍微小變化而引起的評分突變,有效提高評分準確度。整個試驗過程中,REBA總分最低為2,最高為7,風險水平為中,作業姿勢有一定危害,應避免長時間連續工作,需要適當改善作業姿勢。
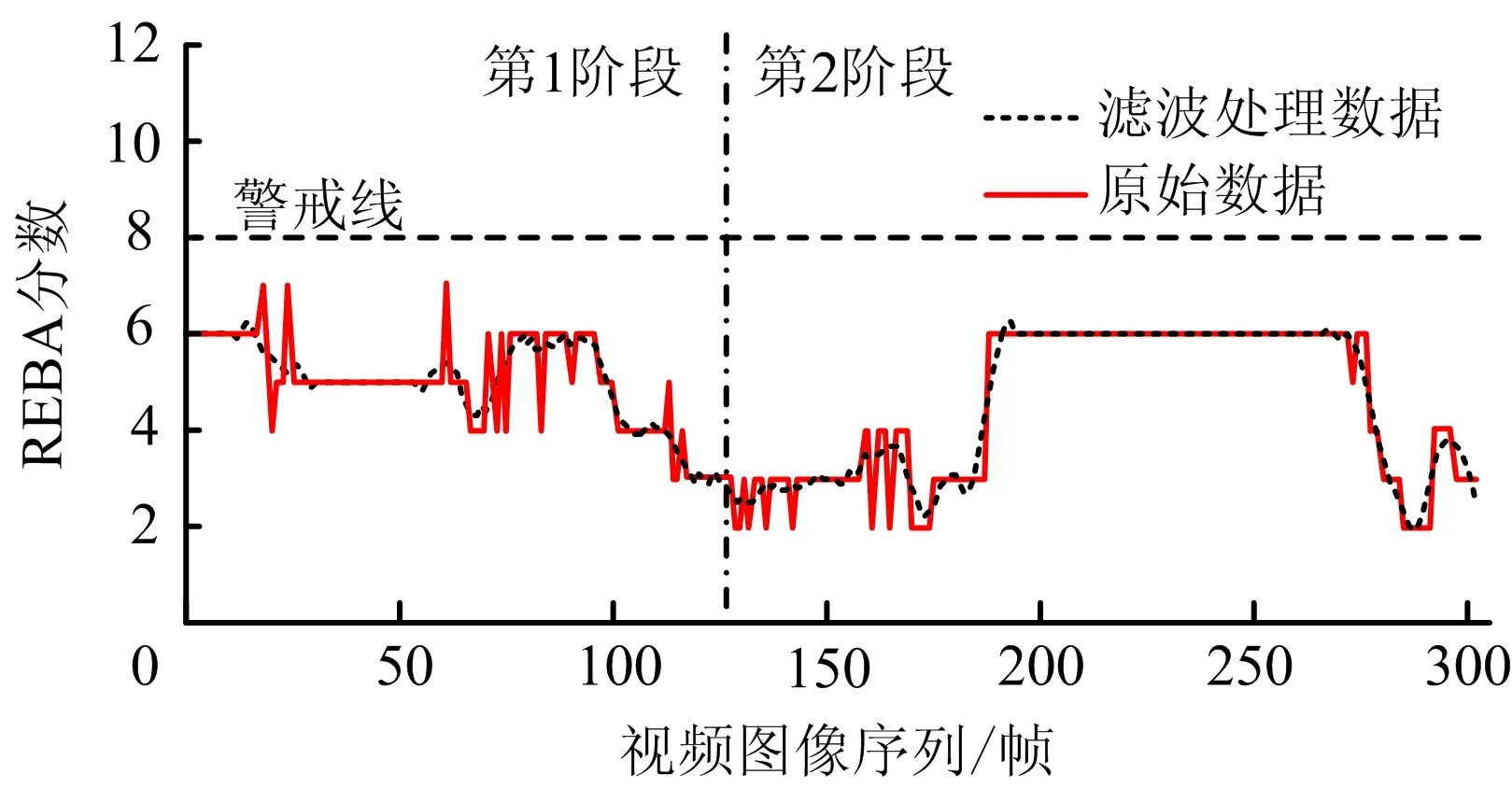
圖10 作業姿勢REBA得分
作業姿勢的REBA總分低于警戒線,第1階段REBA得分波動較大,相對于第2階段得分更高,第1階段隱含危險性更大,在提升試驗物品時身體重心未下降,向前彎腰時腰部負擔加重,易扭傷。在進行搬運作業時,應該監測現場工人身體各部位風險,明確指出其作業行為中的危險姿勢,針對性地提出改善作業姿勢建議。
5 結論
1)利用AlphaPose模型與REBA方法,提出一種非侵入式的作業姿勢風險評估方法,通過采集視頻數據對搬運作業姿勢系統性評估分析,可輸出監測對象身體的關節角度變化與REBA動態打分,為改善作業姿勢提供參考。
2)本文研究方法對于視頻的關節角度計算準確,數據濾波處理降低對視頻采集質量的要求,適用于復雜多變的作業現場觀測環境,可推廣到對特定的動作進行分析評價。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37