基于負壓吸附的井筒施工安監機器人技術研究
2022-08-16 03:00:24付文俊
煤礦安全 2022年8期
付文俊
(北京中煤礦山工程有限公司,北京 100013)
隨著社會對煤炭需求量的日益增長,開采能力不斷提高,開采深度不斷增加是井工開采的必然趨勢[1]。我國預測煤炭資源量在垂深1 000 m 以淺的為18 440.48 億t,其中可靠級9 169.10 億t,占預測總量的40.5%;埋深在1 000 m 以上的為27 080.56 億t,其中可靠級9 969.20 億t,占預測總量的59.5%。隨著深部煤炭資源的開采,煤礦井筒深度也在不斷刷新紀錄,對煤礦建設施工提出了更高的要求,特別是立井深部井筒施工,由于深部巖石在溫度和壓力耦合作用下,加上地層的巖石特性和復雜的層理、節理構造,使井筒施工面臨著水害、瓦斯、提升運輸、墜落等多種災害[2]。而且在施工過程中,大都采用鉆爆法掘進,會產生大量的粉塵顆粒和二氧化碳等有害氣體,如果不及時排除,會嚴重危害施工人員的身心健康,同時當粉塵、甲烷體積分數指標達到一定程度,極易引發爆炸、火災等事故,對施工人員生命安全造成威脅[3]。此外,井筒的空間小,再加上粉塵霧氣大,可見度小,設備電纜較多,存在多種安全隱患,如果巡檢不及時會嚴重危害工作人員的生命安全。井筒事故的發生往往具有突發性和不可預見性,一旦發生事故,造成的后果也通常是比較嚴重的,因此井筒施工智能化安全監測是一個急需攻克的難題[4]。由于新建井筒安全信息封閉和分散,使得礦井在建設生產難以得到完整詳細的實時信息來進行更加有效的監測和提前干預[5]。因此,要實現井筒建設施工的安全和高效,關鍵在于提高井筒的安全監測和信息采集的智能化和無人化,急需研究井筒施工智能安監機器人技術及裝備,替代目前的人工安監和巡檢。
1 安監機器人功能需求
井筒掘進作業,特別是炮掘,作業條件十分惡劣。根據井筒作業的特殊性和安全要求,安監機器人應具備如下安全監察功能:
1)通風瓦斯方面。安全規程要求局部通風機不得隨意停開,如遇突然停風,人員要及時撤至局部通風機前方的安全地點。專職瓦檢員要每班檢查電動機附近20 m 范圍內風流中瓦斯體積分數。根據這一需求,安監機器人必須具備瓦斯和風速監測功能。
2)綜合防塵方面。要求掘進工作面必須有完善的灑水系統,工作面巷道必須定期沖洗,工作面的巷道要保持濕潤,走路時灰塵不飛揚。安監機器人需要具備粉塵監測功能。
3)井壁管理方面。在施工過程中、要有專人監護井壁的變化情況,發現有垮落預兆、片幫預兆時,要將人員立即撤至安全地點。安監機器人應具備井壁變形監視功能。
4)爆破管理方面。爆破后,必須等工作面的炮煙散凈,經瓦檢員檢查并允許后,檢查幫、頂、支架以及拒爆、殘爆等情況。因此,安監機器人還應具備粉塵、一氧化碳檢測、二氧化碳檢測、失爆炸藥識別、聲光預報警功能。
5)防治水方面。施工過程中如發現淋頭水增大必須立即停止工作,撤出人員。機器人應具備井壁滲水識別和監視功能。
6)機器人軟件平臺應具備相關系統融合功能。軟件平臺應具備提升系統、供電系統、通風系統、監測系統的數據和信息融合功能,便于分析和綜合評判,實現安監有效和全覆蓋。
綜上所述,在煤礦立井施工中安監機器人應具備環境粉塵監測、毒害氣體監測、安全巡檢、危險源識別、與其它系統信息融合聯動、預報警等功能。
2 安監機器人研究目標
目前的相關機器人研究中,爬壁機器人技術日新月異,應用領域逐步拓展,如利用爬壁機器人進行建筑外玻璃清潔、容器檢修、安全檢測等,爬壁機器人在一些領域內已經能夠具備一定的功能代替人類做一些繁重危險的工作[6]。研究目標就是研究爬壁式井筒智能安監機器人,機器人能夠在井壁表面爬行,在井筒建設時期負責安全監視和巡檢。機器人采用模塊化設計,可吸附于井壁表面,設計有特殊行走機構,能夠在井壁上進行自主爬行和巡檢,實現在人超視距遙控下進行井筒勘測,同時具有局部自主導航和構建電子地圖的功能。平時可以巡檢井壁的安全狀態、井筒內的風流速度、井筒內的粉塵含量,搭載的智能傳感器能夠監測甲烷、一氧化碳等有毒有害氣體,可智能識別炸藥失爆、井壁變形、井壁滲水等危險源并及時預警。可將監測數據及施工現場圖像無線傳輸至地面,為作業人員進行現場形勢判斷、作業任務決策提供現場依據,可有效保障作業人員安全,提高煤礦立井施工作業效率。
3 安監機器人設計
根據井筒施工的環境特性,結合井筒施工安全監查需要,需要對機器人本體結構、行走機構、吸附機構、控制機構、智能傳感組件、通訊方式和軟件平臺等進行深入研究和設計。
3.1 本體結構
井筒是煤礦與外界的通道,由于煤礦井筒環境的特殊性,存在可燃爆炸性氣體,井筒內電器設備需要滿足礦用產品安全設計要求,需要符合GB 3836國家標準的有關規定,爬壁巡檢機器人的特性決定了本質安全設計的不可行性,隔爆設計不可避免的增加了機器人的體積質量。由于爬壁機器人的負載直接影響其在井壁的可靠吸附,負載大吸附力要求也大,吸附裝置設計難度也隨之增加,所以有效降低機器人自身質量是機器人設計的關鍵。為了適應煤礦井筒空間,機器人結構設計應盡量緊湊,為了既滿足隔爆要求,又減小機器人本體質量,井筒施工智能安監機器人采用隔爆兼本質安全設計,外殼采用不銹鋼材料加工制造,既耐腐蝕又可增加機器人強度,提高抗沖擊能力,內部結構器件采用碳纖維等輕質材料,可有效降低機器人本體質量。機器人本體主要由驅動軸、驅動輪、滾珠軸承、驅動電機、發射天線、通訊裝置、圖像采集裝置、云臺、控制裝置、智能傳感裝置、負壓吸附裝置、殼體等組成。井筒施工安監機器人結構如圖1。
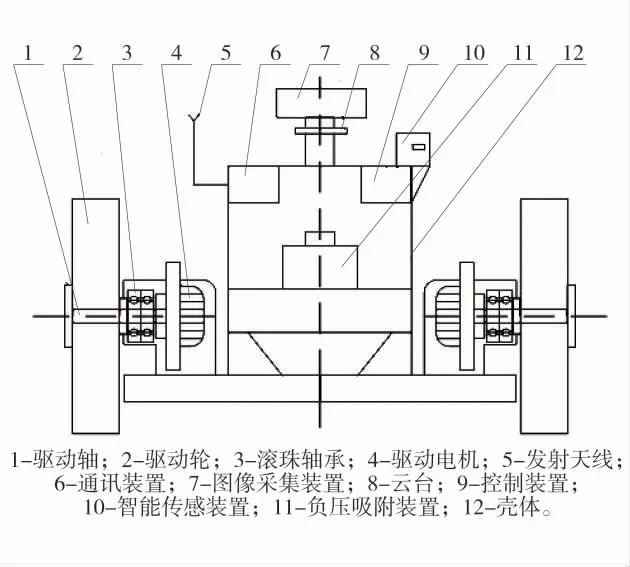
圖1 井筒施工安監機器人結構Fig.1 Shaft construction safety monitoring robot structure
機器人底部結構由驅動輪、驅動電機、吸附盤等與機器人行走有關的機構組成。機器人底部結構如圖2。
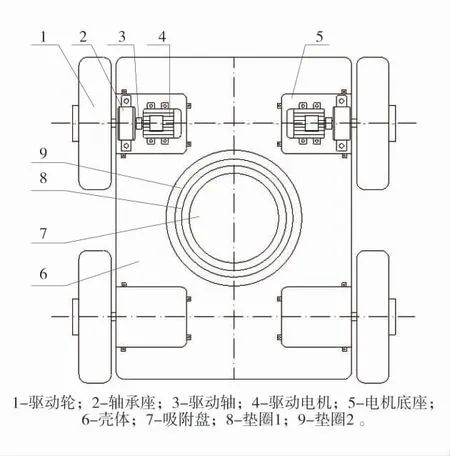
圖2 井筒施工安監機器人底部結構示意圖Fig.2 Bottom structure diagram of shaft construction safety monitoring robot
3.2 行走機構
安監機器人需要在井筒表面自由爬行移動,需要研究設計機器人行走機構。為實現靈活控制,根據汽車的驅動理論原則,井筒施工智能安監機器人的驅動采用4 輪驅動的方式,4 輪分別由4 套直流伺服系統單獨差動驅動,提供所需的轉矩和力矩。這種結構的優點是:①控制方式容易實現,只要分別控制驅動電機的轉速就能控制機器人的行走軌跡;②可實現0 半徑轉彎,提高了機器人在曲線行走過程的靈活性[7];③還能夠增加機器人的承載能力和機器人的運行速度。
井筒施工安監機器人行走機構如圖3,行走機構由電機、減速器、行走輪構成。
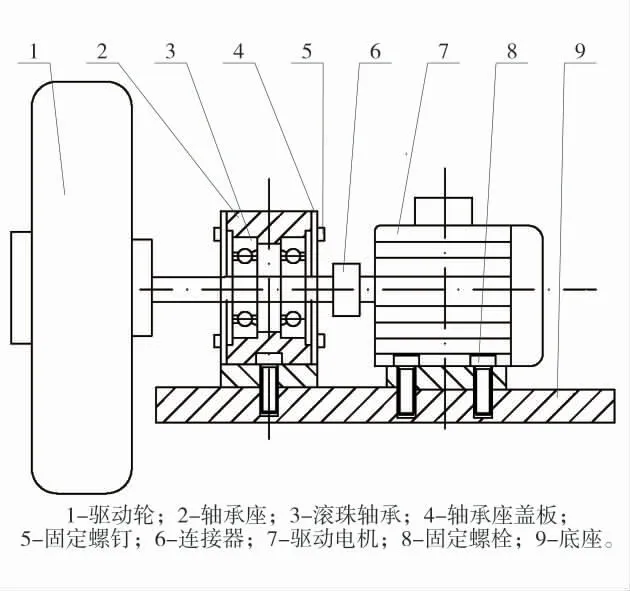
圖3 井筒施工安監機器人行走機構Fig.3 Walking mechanism of shaft construction safety monitoring robot
由于工作條件對機器人整體結構尺寸的限制,將減速器裝置集成在電機內部,把電機的高速輸出軸連接在減速器輸入軸上,并且把減速器輸出軸與驅動輪連接。合理設計配合及連接,并對行走機構進行粗糙井壁表面的全向移動適應性研究,使其能夠在承載機器人本體質量和負載的同時,靈活移動。行走輪由鑄鋼制造,為了提高附著性能,在行走鑄鋼輪表面設計了橡膠圈,同時為適應煤礦井筒內爆炸環境特殊要求,防止橡膠圈與井壁表面摩擦產生靜電,橡膠圈采用阻燃防靜電材料制成,防止由于摩擦靜電產生火花,引爆井筒內可燃易爆氣體,可在煤礦井筒內爆炸氣體環境可靠工作。
3.3 吸附機構
爬壁機器人是一種特殊用途機器人,區別于其他機器人的最顯著的一個特點是機器人可以克服地球引力作用,具有在傾斜、垂直或倒立的壁面上保持靜止及靈活移動的能力。目前爬壁機器人吸附方式主要包括:磁吸附、負壓吸附、螺旋槳推壓等,近年來又出現了膠吸附、仿壁虎足的干吸附、仿蝸牛的濕吸附、類攀巖抓持和毛刺抓持等方式。磁吸附方式包括永磁式吸附及電磁式吸附2 種方式,這一類吸附方式機器人只適合在鋼、鐵等導磁材料表面上吸附;所謂低真空度負壓吸附方式就是利用風機旋轉將吸附裝置負壓腔內的空氣抽出從而產生負壓來吸附,雖然壁面適應能力較強,也存在高噪音、體積大的缺陷;高真空負壓吸附方式是利用真空泵在真空吸盤內形成一定真空度,其優點是低噪音、體積小,但對壁面的光潔度及透氣性有較高要求;螺旋槳推壓原理是靠合理設計螺旋槳的角度,利用螺旋槳旋轉時產生的向內推力將機器人貼附在壁面上,但也存在著高噪音、應用場景受限的缺點。由于負壓吸附機器人具備適用面廣,不受吸附壁表面材料限制,而且低負壓真空吸附方式具有墻壁適應能力強、運動靈活等優點,因此目前低負壓真空吸附的爬壁機器人得到廣泛的應用。
由于煤礦井筒較深、井壁的表面粗糙,機器人工作安全至關重要,機器人需要克服重力,能夠安全吸附在井壁表面,智能安監機器人能夠在一定傾斜度的壁面上靜止及靈活移動,其吸附機構承載能力是首要考慮的問題,負壓吸附機構研究是爬壁機器人的關鍵[8-9]。通過分析現有低真空吸附技術的不足,研究低真空吸附系統的負壓發生技術、負壓自動保持、指令握手等可靠性技術;通過研究新型密封技術原理,設計具有密封效果好、摩擦阻力小的密封機構,保證機器人能夠在井筒表面可靠吸附,提高機器人機動性和靈活性。
當安監機器人工作于豎直井筒壁上時,對機器人進行豎直井筒內壁任意姿態的安全受力分析。為了簡化,將井筒壁表面簡化為平面,并且只對吸附力要求嚴格的向上直線運動狀態的安監機器人進行受力狀態分析。爬壁機器人受力簡圖如圖4。
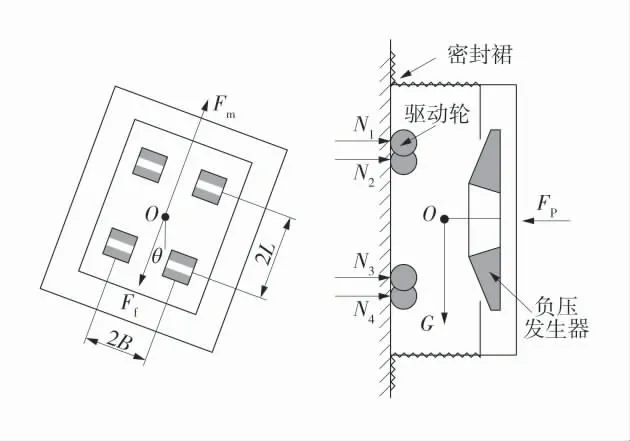
圖4 爬壁機器人受力簡圖Fig.4 Force diagram of wall climbing robot
當爬壁機器人在豎直平面上以與豎直方向呈θ角姿態直線向上運動時,根據達朗貝爾虛功原理及受力平衡關系, 豎直壁面任意姿態安監機器人直線運動的受力方程為:
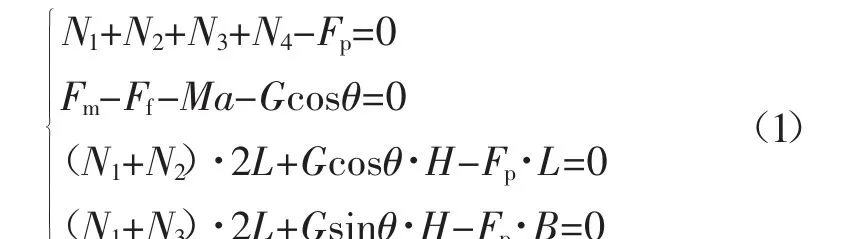
式中:Ni為墻壁作用在各行走輪上的壓力;Fp為由內外壓差引起吸附作用產生的在機器人本體的等效合力;Fm為爬壁機器人驅動輪摩擦力;Ff為墻壁對密封裙的摩擦力;M 為機器人質量;a 為機器人加速度;G 為機器人所受重力;L 為機器人重心到前后輪距離;B 為兩前(后)輪子間距,且設定L>B;H為機器人重心到墻壁的距離。
若設定密封裙上產生的負壓吸附力為機器人本體負壓吸附力的1/4,則滿足機器人運動條件的機器人本體上最小負壓吸附力Fp:
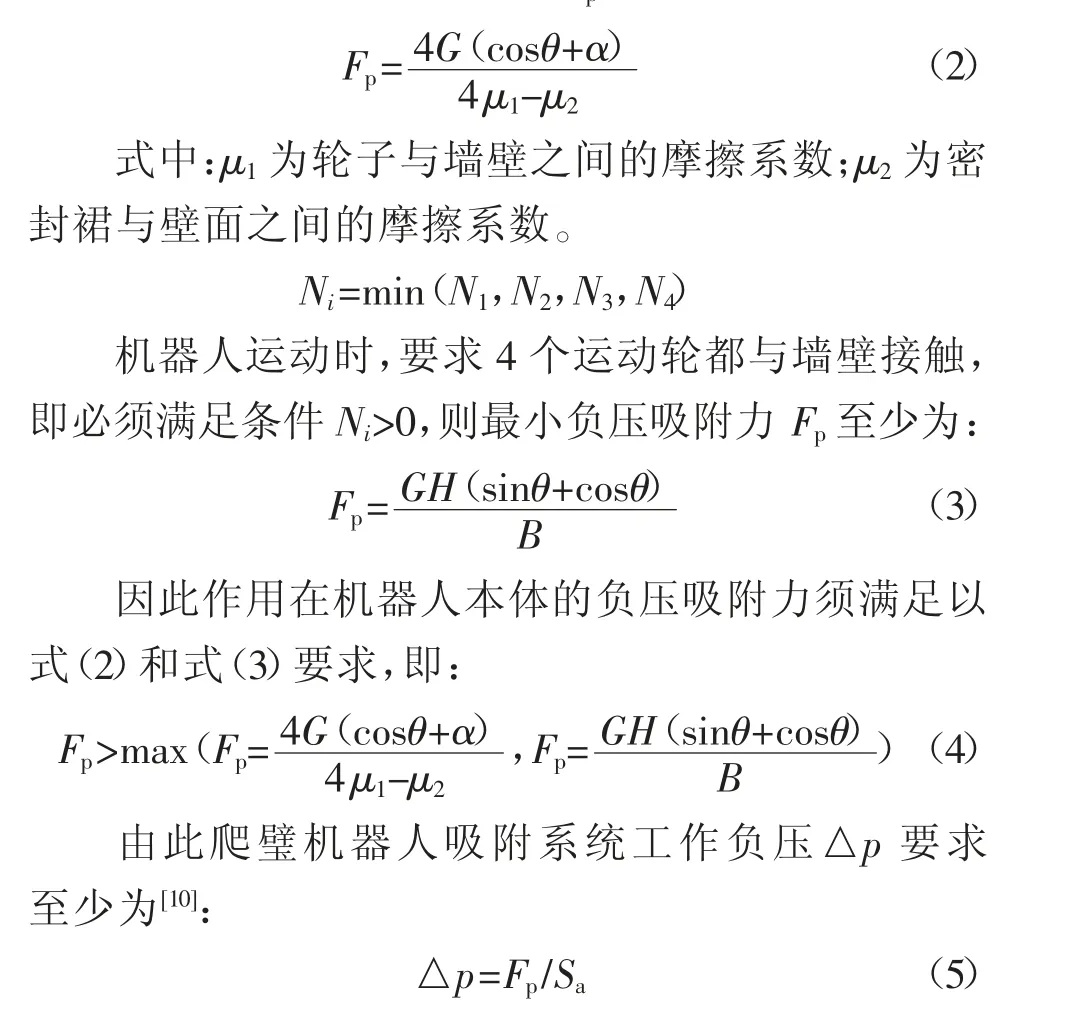
式中:Sa為機器人有效吸附面積。
由于井壁表面與玻璃幕墻、建筑物外墻相比較,井壁表面曲率小、粗糙度大,負壓吸附裝置設計難度極大。所以設計采用低負壓真空吸附的爬壁機器人,其原理簡單而言,就是采用旋轉風機抽出負壓腔內的空氣從而產生負壓來實現壁面吸附[11]。本設計采用一種負壓吸附高速旋轉(25 000 r/min 以上)的徑流式離心風扇將爬壁機器人吸附腔內的空氣甩出形成負壓。負壓吸附機構主要由:密封圈、吸附盤、出氣嘴、固定螺栓、吸附電機、葉輪、吸附機構殼體等組成。井筒施工智能安監機器人負壓吸附機構如圖5。
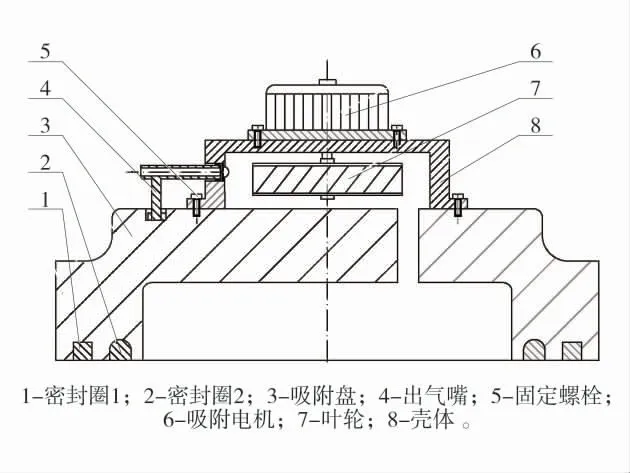
圖5 井筒施工智能安監機器人負壓吸附機構Fig.5 Negative pressure adsorption mechanism of intelligent safety monitoring robot for shaft construction
3.4 機器人控制模塊
機器人控制模塊負責機器人的驅動控制及功能控制部分,實現自動爬行和探頭掃查運動及其控制[12]。井筒施工安監機器人控制模塊如圖6,井筒施工智能安監機器人控制模塊包括主控與通訊模塊、驅動控制模塊、無線數據傳輸模塊、人機交互顯示模塊、傳感器采集模塊、視覺處理模塊等組成。
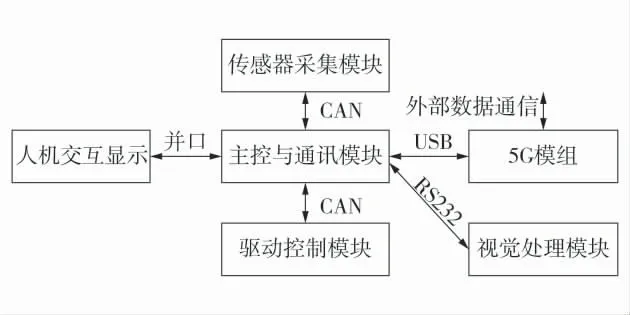
圖6 井筒施工安監機器人控制模塊Fig.6 Control module of shaft construction safety monitoring robot
主控模塊負責整個系統中的人機交互顯示、傳感器采集、視覺處理、驅動控制、通訊等模塊的協調工作和對外交互,通過設計便攜式遙控裝置,極大的降低了操控難度,可實時顯示現場圖像和聲音,設計的遙控手柄可對機器人進行運動控制。機器人也具備遠程控制功能,由操作人員在地面控制中心計算機實施遠程控制。機器人可按設定規劃路線自行巡檢。針對井筒施工智能安監機器人的工作特點,改變現有爬壁機器人主流技術把運動系統控制和吸附系統控制作為2 個獨立部分進行單獨研究的方式,將兩者相結合起來研究,以實現對運動系統和吸附系統的最優可靠控制。
為了實現機器人自主行走巡檢,需要設計機器人伺服電機控制系統和位置確定模塊。伺服驅動器設計采用主流數字信號處理器(DSP)作為控制核心,功率器件驅動電路選用以智能功率控制模塊(IPM)為核心設計,形成以偏差控制的閉環控制系統。
安監機器人沿井筒行走的運動控制算法是機器人設計的關鍵,控制算法能夠保證機器人沿規劃好的行走路徑平穩行駛,達到預期的位姿和巡檢速度,同時具有適應井筒較強電磁干擾環境能力。設計采用Kanayama[13]提出一種簡單有效的基于移動機器人運動學模型的控制算法,可以保證穩定的軌跡跟蹤特性。
用設計的算法[14]控制安監機器人按規劃路線行走時,安監機器人的實際運行軌跡與規劃路線之間的位置誤差會收斂到足夠小,并且安監機器人的實際行走速度也可達到按規劃路線行走時設定的規劃速度。
3.5 機器人通訊
機器人通訊系統是機器人實現信息交互的重要手段。目前在機器人通訊設計方面,隨著處理信息的日益復雜,并且考慮到工作環境的需要,根據應用領域的不同,選擇不同的機器人通訊方式[15]。所以需要根據井筒的結構特點,研究煤礦井筒安監機器人的通訊技術方法。由于井筒屬狹長空間,煤礦井筒深度大,傳統的有線通訊方式存在著與機器人無法匹配、井筒線纜鋪設困難等缺點。所以最佳方案是采取無線通訊方式,系統設計由5G 核心網、5G 基站控制器、5G 基站和5G 工業路由器等設備組成。在井筒適當位置設置5G 通訊無線基站,實現井筒5G 信號覆蓋,在機器人本體上設計安裝5G 工業模組,實現機器人實時控制和高速數據傳輸。工業模組設計采用華為巴龍HM5000-31 芯片,核心器件包括主芯片、PMU、射頻器件等組成,適宜井筒安監機器人應用。支持NSA/SA 雙模,可根據實際需要靈活接入不同5G 模式網絡,支持5G SA 網絡建設,支持2G/3G/4G/5G 全兼容,直接同步5G 網絡覆蓋節奏。下行速率高達2 Gbps,上行速率高達230 Mbps,滿足井筒安全巡檢應用的高帶寬要求。工作溫度范圍廣至-40~85 ℃,采用高可靠性器件以及工業獨特設計,適應煤礦井筒復雜環境。
3.6 機器人智能傳感系統
機器人傳感器的選取,取決于機器人的工作需要和應用特點[16]。針對煤礦立井建設時期環境的復雜性,特別是井筒環境中的氣體成分多樣性,需要研究井筒環境監測傳感技術。傳感器采集模塊組成結構如圖7。
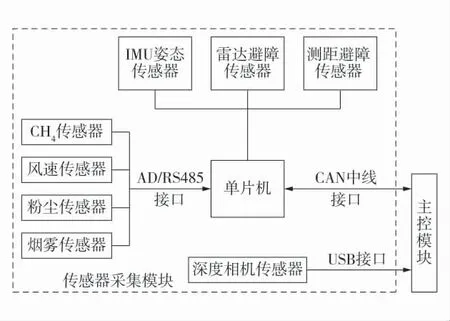
圖7 傳感器采集模塊組成結構Fig.7 Composition structure of sensor acquisition module
首先研究適合煤礦建設井筒環境應用的傳感技術,開發智能傳感器,開發可實時監測井筒風速的風傳感器,開發可監測井筒環境中甲烷氣體體積分數的甲烷傳感器,開發可監測井筒環境中一氧化碳氣體體積分數的一氧化碳傳感器,開發可監測井筒中粉塵濃度的粉塵傳感器,開發可監測放炮施工后環境的煙霧傳感器。
其次開發數據采集裝置,可與傳感器實時通訊,采集接收傳感器數據信息,實現機器人對井筒環境信息的采集和監測。
此外,為實現機器人自主行走和避障,機器人還需要配置IMU 姿態傳感器、激光雷達避障傳感器、超聲測距避障傳感器、深度相機傳感器。
傳感器采集模塊采用STM32F407 單片機作為模塊采集的核心,通過不同的接口與各類傳感器進行通信、數據采集,匯總之后再打包上傳到主控與通訊模塊,這樣的設計易于擴展、減輕主控模塊的壓力。
3.7 機器人危險源識別系統
感知系統是智能機器人與人、外部環境實現交互最重要的組成部分[17]。機器人危險源識別模塊功能如圖8。
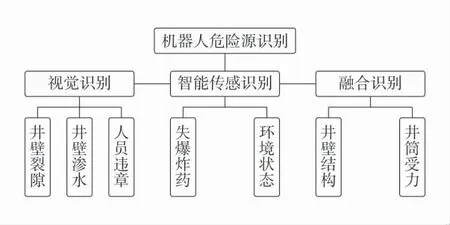
圖8 機器人危險源識別模塊功能Fig.8 Robot hazard identification module function
煤礦井筒施工智能安監機器人需要具備安全隱患視覺識別能力。智能安監機器人系統視覺識別單元基于TCP/IP 和SIP 等協議,采用先進數字信號處理技術,可實現視頻數據采集(開發視頻采集裝置和識別技術),具備智能分析(能夠分辨井筒異常、故障)功能,智能軟件平臺能與智能廣播系統聯動播放安全預警信息,便于安監人員及時掌握井筒狀態。設計專業化視頻采集裝置,能夠克服井筒光照限制、缺乏色彩信息、目標與背景相似等引起的視頻識別干擾,系統采用視頻增強算法和智能視頻識別技術,能從危險區域的視頻圖像中檢測“人-機-環”的異常狀態信息,自動捕捉和跟蹤異常點,能夠及時發現和智能辨識井壁裂隙、滲水等危險源,并及時預警。可以與其他井壁監測系統融合聯動,識別井壁結構應力變化、井壁變形等安全隱患,為技術人員進行井筒安全狀態評判、井筒建設作業決策提供現場依據,可有效保障井筒建設安全,提高井筒建設作業效率。能夠智能判斷異常位置并且自主跟蹤,并及時預警。
3.8 失爆爆炸識別
在煤礦井筒施工中,爆破施工是一種常用的掘進作業模式。爆破施工過程中,由于炸藥質量、雷管質量、炮線損壞、炮線接觸不良等原因導致個別炸藥雷管失爆。失爆爆炸物品殘留在渣土中,在渣土清理、運輸過程中,可能會由于外力撞擊的作用而造成爆炸物品的爆炸,存在著不可預測的爆炸危險性,也會造成人員傷亡和財產損失。對于失爆炸藥檢測,是目前爆破作業的難點,采用人工檢測,存在風險高、識別率低等缺點。設計開發失爆炸藥的自動識別技術裝備,可由機器人攜帶,保證信息讀取的快速性和可靠性,利用無線通訊技術和柔性標簽編碼識別技術,可靠識別失爆雷管和炸藥,失爆炸藥檢測率大大提高,識別工作無須人工干涉,能夠自動識別和告警,爆破后可由機器人探測失爆炸藥和作業面安全狀態,確認安全后,工作人員方可進入作業現場,極大的保障了作業人員安全,減少事故的發生。
井筒施工失爆雷管和失爆炸藥智能識別裝置,能夠在煤礦井筒爆破掘進建設時期,負責爆破施工作業失爆炸藥和失爆雷管智能精準識別。井筒施工失爆雷管和失爆炸藥智能識別裝置主要由便攜式失爆雷管和失爆炸藥識別主機和柔性識別標簽2 部分組成:①便攜式失爆雷管和失爆炸藥識別主機:主要由殼體、數據接口、聲音報警裝置、報警模塊、手提裝置、LED 顯示模塊、光報警裝置、通訊模塊、天線、控制面板、主板、電池模塊等組成;②柔性識別標簽:由柔性可粘貼本體、芯片主板、外部標識等組成。
井筒施工失爆雷管和失爆炸藥智能識別裝置采用無線通訊技術和柔性標簽編碼識別技術,設計采用跳頻工作模式的無源電子射頻標簽,具有極強的抗干擾能力,裝置識別更加精準快捷,識讀實現不接觸方式,距離可達10 m 以上。可同時讀取多個炸藥和雷管信息,超低功耗,有效減小了體積和質量,布置靈活、安全。可保證信息讀取的快速性和可靠性,能夠精準可靠識別失爆雷管和炸藥的位置和數量。
在爆破實施前每個雷管和每個炸藥包上均固定有無源柔性識別標簽,并進行編號和位置設定,便攜式失爆雷管和失爆炸藥識別主機與柔性無源識別標簽兩設備可保持無線實時通訊、接收和發送狀態信息數據。井筒爆破作業實施后,便攜式失爆雷管和失爆炸藥識別主機可由安監機器人攜帶或者安監人員攜帶,能夠準確辨別失爆炸藥和失爆雷管。
4 軟件平臺
安監機器人軟件平臺可支持機器人全部功能,其開發質量關系到機器人研究的成敗。針對目前機器人控制軟件專用性強、可開發性低、升級成本高等問題,采用通用控制軟件平臺方案[18]。操作系統選用Windows 10 平臺。主軟件界面開發平臺擬選定Unity(版本號:2018.4.8f1)為基準,該版本為Unity 的長期支持版本(LTS),有利于后期進行維護,相比于使用QT 等基于圖形組件的開發平臺,Unity 具有節約開發成本、基于組件和框架的優勢、渲染性能高、光效粒子系統先進、可擴展性等優點。開發的通用機器人軟件平臺,可實時顯示機器人傳回的視頻畫面,顯示機器人采集的有害氣體數據,對異常數據進行報警,并對數據進行分析、存儲、共享和打印,具備對機器人遠程控制和遠程參數設定功能,輔助機器人實現智能決策,為安全管理人員正確決策提供技術支撐。
5 結 語
從實際應用角度論述了煤礦井筒建設時期智能安監機器人的設計與研究,通過本項目的研究,能夠有效減少煤礦井筒建設時期各類事故發生,通過與設備、人員管理系統的有機結合,更好的發揮了安監機器人的作用,切實保障了井筒建設時期的安全生產,提高井筒建設效率,減少人員、財產損失,節約人力資源成本。由于煤礦立井施工智能安監機器人技術沒有成功先例可以借鑒,本研究存在一定的技術局限性,機器人功能和性能指標還有待于不斷提升和完善。煤礦安監機器人的研究剛剛起步,隨著國家煤礦智能化、無人化戰略逐步推進,煤礦安監機器人在煤礦安全巡檢領域將會發揮更大作用,煤礦安監機器人技術發展也將會日新月異。井筒建設時期安監機器人的推廣和應用,能夠及時發現安全隱患,排除故障,提升井筒建設時期安全保障能力,必將有效減少煤礦井筒建設時期的安全事故,保障了煤礦建設的順利開展。
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
工業設計(2016年4期)2016-05-04 04:00:23
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50