煤礦井下車輛乘人防漏識別讀卡基站設計
2022-08-16 03:00:24任高建戴劍波
煤礦安全 2022年8期
任高建,戴劍波
(1.瓦斯災害監控與應急技術國家重點實驗室,重慶 400037;2.中煤科工集團重慶研究院有限公司,重慶 400039)
2021 年版《煤礦智能化建設指南》中要求“采用精確定位技術,實現動目標精確定位,井下復雜巷道全覆蓋[1]”。隨著精確人員定位系統在部分煤礦升級改造運行,精確定位功能大部分能夠實現,但也暴露出共性不足之處:對于井下作業人員乘坐交通運輸工具時,由于車輛移動速度、電磁屏蔽等原因造成井下作業人員標識卡漏識別,不能夠實時動態監測井下人員位置信息,出現監測信息不連續、定位軌跡跳變;同時,無法統計車輛內乘人準確數量,對于車輛超載違規行駛不能做到有效管控。針對存在的問題,設計一種讀卡基站,采用超高頻RFID 近距離無源識別技術與UWB 精確定位技術相結合的方法,通過巷道內讀卡基站與車輛讀卡基站直接通信測距,同時與乘車人員攜帶標識卡間接通信測距,從而有效解決車輛乘人容易漏識別問題,能準確統計車輛內乘車人數[2-4]。
1 讀卡基站原理
讀卡基站根據AQ 6210—2020 煤礦井下人員定位系統通用技術條件(征求意見稿)中內容規定本安及抗干擾等級要求設計,主要由EMC 電源輸入保護電路、電源轉換電路、語音提示模塊、主控制MCU、LED 顯示電路、超高頻讀卡模塊、UWB 人員測距模塊、UWB 車輛測距模塊、車輛運動狀態檢測模塊、不同增益內、外置全向天線等電路組成。讀卡基站整機設計原理框圖如圖1。

圖1 整機設計原理框圖Fig.1 Block diagram of the whole card reading base station
2 關鍵電路
2.1 EMC 電源保護單元
EMC 電源輸入保護設計原理圖如圖2。
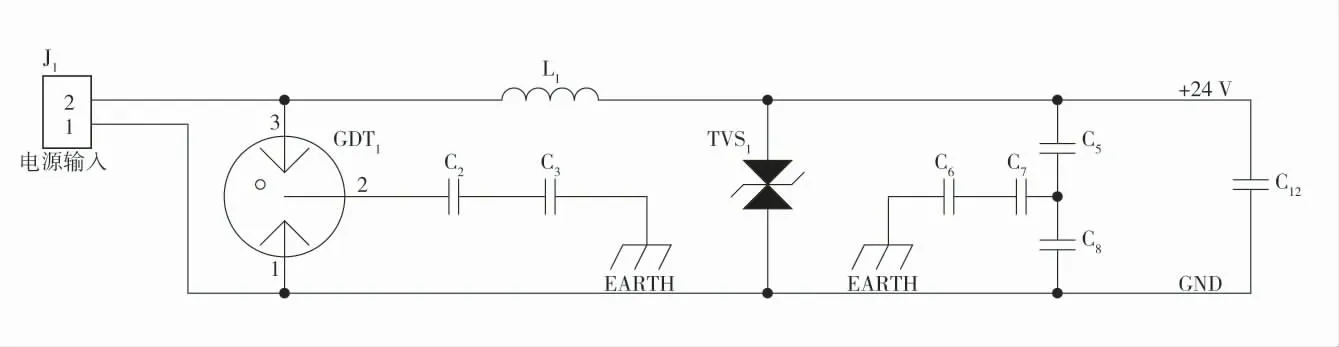
圖2 EMC 電源輸入保護設計原理圖Fig.2 Schematic diagram of EMC power input protection design
讀卡基站對電源輸入部分按照要求進行了電磁兼容防浪涌、群脈沖保護設計。電源輸入保護分為2級保護:前級保護為GDT1陶瓷氣體放電管,當浪涌、脈沖群電壓達到其動作電壓值,GDT1呈關閉導通狀態,導通后通過C2、C3電容泄放大部分沿電源線感應、傳導而來的浪涌、脈沖群電流;由于氣體放電管響應時間在微秒級別,其浪涌殘余電壓還可能有幾百伏,后極電源芯片無法承受,因此增加后級保護,TVS1為瞬態抑制二極管,響應時間在皮秒級別,箝位電壓低,滿足后級電源芯片工作電壓范圍。在GDT1放電管和TVS1瞬態抑制二極管之間增加電感L1,利用阻交流通直流的瞬態特性,對浪涌、脈沖群形成阻礙作用,從而進行延時與分壓,將電壓箝位在后級電源轉換芯片承受范圍之內。C2、C3、C6、C7電容在本安端與外殼之間起絕緣隔離作用,C5、C8電容為濾波作用。通過測試,讀卡基站電源輸入端口能通過GB/T 17626.4—2018 標準規定的嚴酷等級為2級、評價等級為A 的電快速瞬變脈沖群抗擾度試驗,能通過GB/T 17626.5—2019 標準規定的嚴酷等級為2級、評價等級為B 的浪涌(沖擊)抗擾度試驗[5-6]。
2.2 超高頻讀卡單元
超高頻讀卡單元設計原理圖如圖3。

圖3 超高頻讀卡單元設計原理圖Fig.3 Schematic diagram of UHF card reading unit
讀卡基站設計超高頻RFID 讀卡模塊,通過近距離非接觸識別標識卡內置無源標簽。超高頻讀卡模塊選用840~930 MHz 頻率范圍RF200 模塊,通信協議兼容ISO18000-6C/EPC Gen2,通過TTL 串口直接與主控制MCU 傳輸數據,通訊速率可達57 600 bps,讀卡基站內置3dBi 雙饋點陶瓷天線RF915A,利用射頻信號和空間耦合傳輸特性,實現對標識卡內置無源標簽的識別。讀卡模塊首先通過天線向無源標簽發射出電磁波,無源標簽從電磁波中提取工作所需要的能量,電磁波遇到無源標簽后并散射一部分電磁波到讀卡模塊,讀卡模塊接收信號并解調后獲得無源標簽數據信息。無源標簽數據傳輸可以分為從讀卡模塊到無源標簽前向鏈路,無源標簽到讀卡模塊后向鏈路2 部分,前向鏈路與后向鏈路采用半雙工方式通信,數據傳輸采用ASK 調制,前向鏈路采用PIE 碼,后向鏈路采用Miller 碼,軟件采用CRC-16 校驗碼和特殊防沖突算法保證無源標簽卡號識別正確。通過車輛運動狀態檢測傳感器,在檢測到車輛靜止時,主控制器PC0 管腳置低電平,關閉RF200 模塊工作,檢測到車輛啟動時,主控制器PC0管腳置高電平,開啟RF200 模塊工作,用以區分車輛靜止時識別到周圍人員無源標簽誤判為乘車,同時降低整機功耗。
2.3 UWB 測距單元
UWB 測距單元設計原理圖如圖4。

圖4 UWB 測距單元設計原理圖Fig.4 Schematic diagram of UWB ranging unit
讀卡基站設計了車內乘人UWB測距模塊和車輛UWB 測距模塊[7-10]。車內乘人UWB測距模塊U3未加射頻功率放大器,通過GD32F405 MCU 芯片配置DW1000 射頻芯片內部寄存器控制輸出發射功率,同時采用內置增益較小全向天線,縮短讀卡基站與車內乘人通信距離;車輛UWB 測距模塊U6增加射頻功率放大器,采用外置高增益全向天線,車內乘人測距信息通過車輛UWB 測距模塊天線傳輸給巷道內讀卡基站,巷道內讀卡基站只需與車輛UWB測距模塊通信實現測距,即可實現對車內乘人間接測距,而不會出現車輛在運動行駛過程中漏識別乘人測距信息。
3 讀卡基站軟件
讀卡基站軟件設計主要實現車輛運動狀態檢測、無源標簽卡號識別,車內乘人UWB 測距、讀卡基站與巷道基站UWB 測距等功能。讀卡基站軟件設計示意框圖如圖5。

圖5 軟件設計示意框圖Fig.5 Schematic block diagram of software design
讀卡基站首先通過車輛運動狀態檢測傳感器檢測車輛是靜止還是啟動狀態,如果車輛靜止,讀卡基站超高頻RFID 讀卡模塊斷電關閉,巷道基站與讀卡基站建立直接測距鏈路,實現對車輛進行測距定位;如果車輛運動,超高頻RFID 讀卡模塊讀取乘人標識卡內置無源標簽信息,根據無源標簽信息,乘人UWB 測距模塊向指定標識卡廣播入網請求幀,接收到入網請求幀的標識卡可以確認為已上車,若10 s內沒有接收到入網請求幀則判定為乘人已下車或在車外。已上車的乘人,通過讀卡基站乘人UWB 測距模塊與標識卡建立直接測距鏈路,巷道基站與車輛UWB 測距模塊建立標識卡間接測距鏈路,從而實現對車輛乘人定位;巷道中行人或已下車乘人通過巷道基站與標識卡建立直接測距鏈路進行定位。
4 結 語
設計了一種讀卡基站煤礦井下車輛乘人防漏識別讀卡基站。讀卡基站通過超高頻RFID 識別、乘人UWB 測距、車輛UWB 測距3 種不同方式組合實現車輛內乘人不受車輛移動速度、電磁屏蔽等原因影響,可有效區分車輛內乘人與巷道內行人,掌握車輛乘人具體數量及實時位置信息,提高了煤礦井下人員定位連續性和可靠性;讀卡基站可以有效管控車輛超載違規行駛行為,為煤礦企業實現以人為本,持續穩定、健康發展,提高安全生產管理效率的目標奠定堅實基礎。