礦山膠帶運輸智能巡檢機器人的探索與應用
2022-08-17 09:17:40陳繼勛
電子制作 2022年14期
陳繼勛
(蘭州石化職業技術大學,甘肅蘭州,730207)
0 引言
帶式輸送機作為煤炭工業中最重要的運輸設備之一,其所具有的實際情況,直接影響著煤礦的生產和安全。在針對礦山開采過程中,所具有的必要安全性進行保障時,其中一個關鍵性環節就是礦山的安全巡檢,在這里面包括的關鍵性檢查內容有電力、作業環境、排水系統以及開采系統等方面及環節。在安全檢查領域,不僅要求相關人員在規定的時間內進行相關檢查,而且還需要耗費大量的時間和物力實現礦山綜合經營,把握最終進行檢查的目的。由于大部分礦運輸路線長,運輸系統復雜,雖然安裝了一些安全控制裝置,但由于監測點的安裝位置有限,安裝了安全帶監測保護系統和防煙系統,產生了一定的效果,設備可能出現故障,不能對事故做出及時的預防措施;工作人員必須進行地下巡查,但由于相關工作人員在責任心以及專業水平方面欠缺,巡查往往不經檢查就進行。如果輸送機不工作,不僅會影響公司的生產效率,嚴重時還會危及工人的安全。同時,使用人工進行巡檢的方式存在著諸多問題,如使用人工工作量大且效率低下,同時造成了在人力資源方面的浪費等問題。與此同時,能夠實現在勞動強度方面的降低,大幅度提高礦山相關管理水平,從而有助于促使礦山的工作管理模式,朝著數字化、自動化方向不斷深入發展,從而在礦山的安全生產方面,發揮著其獨特的重要作用。目前,雖然機器人的研究還不成熟,但隨著國家“智能化”戰略和“安全礦山”戰略的實施,對機器人的研究起到了很大的推動作用。
然而,目前供應于煤礦方面應用的智能巡檢機器人,尤其是利用膠帶運輸方向的相關研究,仍然處于不完善不成熟的階段。但由于現在在人力方面的成本持續增長的現實,國家不斷推出相關戰略方針政策,對這一方面的研究,以及在礦山方面的實際應用都提出了對應更高層次的要求,在礦山作業現場的實際應用效果統計,對該類機器人的研究不斷完善推動,發揮出其獨特的關鍵性作用。
在此基礎上,本文提出了一種帶有皮帶轉換器的通用控制機器人系統,該系統可以實現無人值守和事故預警。通過現場應用,驗證了該項目的可行性。現場試驗表明,該控制機器人能夠實時監控皮帶變換器的運行情況,達到“無人監管、無人巡邏”的目的,有效減少了井下控制作業次數。
1 膠帶運輸智能巡檢機器人應用要求及結構組成
■1.1 膠帶運輸智能巡檢機器人工作原理
礦井智能控制機器人是實現數據采集和上傳控制功能的主體。本實用新型采用簡化設計,結構緊湊,體積小,重量輕,電路設計能夠保證固有安全。它還可以確保他能夠在煤礦的特殊環境中執行控制功能。由低照度的大型動態攝像機采集的圖像可以實時反映輸送機的實際工作狀態,并隨時間檢測錯誤;如果膠帶輸送機異常,故障部件通常會發出明顯的異常聲響,可采集聲音從而得出結果分析和評估;安裝的煙霧探測器通過運輸實時監測煙霧濃度,并在首次出現報警值時,發送針對爆炸控制指示器的報警信號;設置的紅外溫度檢測器不與帶式輸送機接觸,而是通過測量其發出的紅外輻射強度來計算表面溫度,以便快速檢測輸送機溫度并防止事故發生。如果其他環境流量計的參數異常,應同時在本地和遠程激活;為了解決移動設備電源不舒適的問題,拖動電纜,機器人本體內部電路采用爆炸性鋰電池供電,低能耗設計,并可補充無線流量。
■1.2 智能帶式輸送機巡檢機器人應用要求
由于分析了煤礦井下的基礎條件,尤其是處于膠帶運輸方面的實際工作環境,具有一定的特殊性與復雜性,因此用于此類環境進行巡檢工作的智能機器人,需要符合以下描述的條件。
(1)該類機器人所工作的環境,客觀條件方面濕度較大,因此需要充分考慮到,濕度可能會機器人在精度以及穩定性等方面造成一定程度上的影響。
(2)礦山的相關工作會涉及到使用大型的機電類設備,在其附近一般具有較強的電磁以及射頻等干擾情況,這一點要求該類機器人的系統在設計上,應當具備較強的抗電磁以及射頻干擾的能力。
(3)其工作空間在長度方面較大但較為狹小,同時具有許多的起伏轉彎,這對該類機器人在其行走方面的速度、最大行走范圍距離受到了一定的限制。同時在其爬坡以及轉彎半徑方面提出全新的較高要求。
(4)同時在礦山生產中的部分特殊環節以及特殊情況,如膠帶運輸廊道上的相關巡檢工作的開展,要求該類機器人,需要更高的智能水平,以及在監控方面的功能更加強大。
(5)該類機器人首先應當確保其安全,因此應當具備在充電時的相關閉鎖功能。
(6)該類機器人應當具備針對各類環境的檢測分析,客觀條件采集以及遠程控制和本體自檢等相關功能。
(7)該機器人應當通過其遠程控制監測平臺,該平臺應當能夠實現在環境以及設備之間的連續移動的智能監測體系,以及在應急火災發生時的報警與解決處置功能。
■1.3 膠帶運輸智能巡檢機器人結構組成
為了能夠更好的實現上述地目標與功能,針對該類機器人,在其系統上的設計應當是以下將會描述到的幾個系統的集合[1]。該類智能機器人的具體結構組成如圖1 所示。
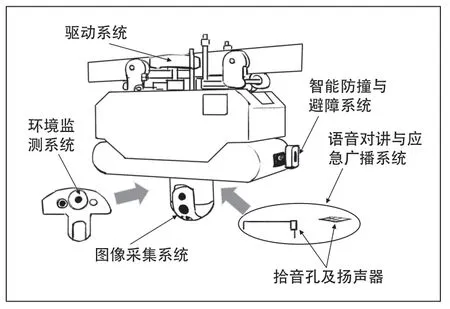
圖1 結構組成
1.3.1 驅動系統
由于在礦山的膠帶運輸廊道內,地形具有較高的復雜性,能夠確保機器人在工作時都能實現行走的平穩性,需要具備較好的適應能力。因此,在進行驅動系統的設計工作時,應當在其左右具備壓緊機構,同時還有水平以及垂直的旋轉機構,這些機構可以全方位保障機器人的穩定巡檢功能[2]。具體驅動系統的結構示意圖如圖2 所示。
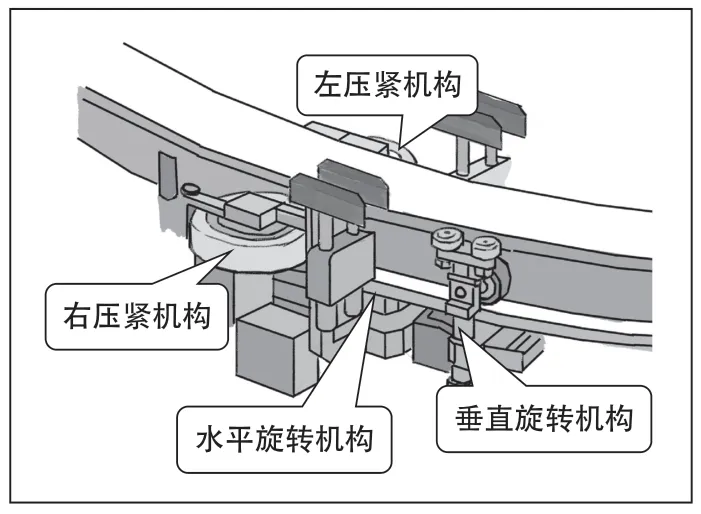
圖2 驅動系統結構示意圖
1.3.2 圖像采集系統
圖像采集系統主要是通過對云臺搭載的基礎,該云臺應當具備高度的一體化水平以及高性能表現,能夠利用紅外熱成像以及可見光攝像機,相關圖像參數見表1。
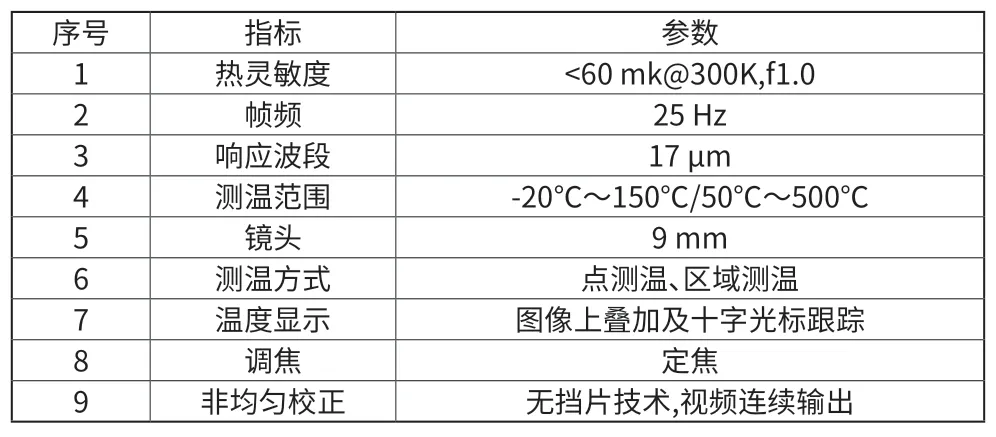
表1 圖像采集系統參數表
1.3.3 語音對講及應急廣播系統
該系統主要由多個功能共同構成,能夠完成現場與調度室之間,進行必要的交互式交流,以及在緊急狀態下的通訊功能。根據相關的應用要求,該系統能夠充分完成語音監聽操作,其具體范圍區間為5~80m2,實際輸出阻抗的范圍為600~1000 Ω,屬于非平衡電阻,在1 m 之外距離40 dB的實際音源情況下,具體信噪比處于85 dB,其能夠接收的頻率范圍區間為20~20 kHz。
1.3.4 環境檢測系統
在該機器人進行環境檢測部分的系統中,具體應當包括諸多方面。尤其是對于礦山,這類具有特殊性質的作業環境,關鍵的一項工作就是針對氣體的檢測。該類機器人進行檢測工作能夠對氣體進行持續性監測,其中包括四種,當其超出一定限度之后,該系統就可進行報警操作。相關氣體檢測指標見表2。
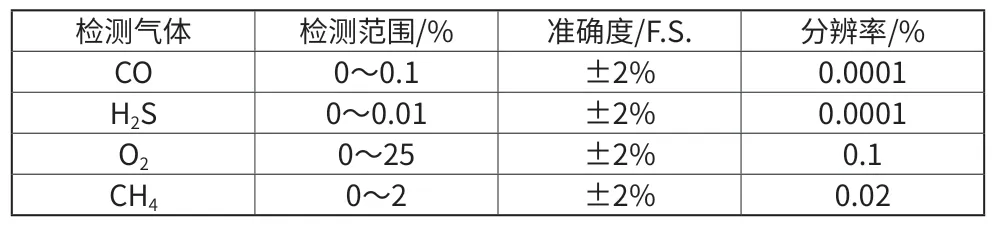
表2 氣體檢測指標
在進行溫度以及濕度的檢測時,機器人所能達到的具體測量范圍為:溫度區間-40℃~+123.8℃,濕度區間0%~100%RH,同時溫度的測量的誤差范圍為±0.5℃,以及濕度的測量的誤差范圍為±4.5%RH。在進行煙霧檢測時,機器人的靈敏度處于0.5 db/m(±0.1 dB/m)。進行光照度檢測時的測量范圍區間處于0~65535 Lux,同時能夠根據所處光照條件場景的不同,進行合理的智能調整操作,具體表現為:在夜間且無月亮照明時,光照測量區間為0.001~0.02 Lux,在夜間有月亮照明時,光照測量區間為0.02~0.3 Lux,在陰天狀態下,同時處于室內條件時,測量區間為5~50 Lux,在陰天條件下并處于室外時,測量范圍為50~500 Lux,在晴天條件下,并處于室內時,測量區間為100~1000 Lux。另一項重要的巡檢工作就是火焰探測,往往選擇采用通過對紫外線波長(185~260 nm)進行檢測的,相關輻射類型探測器進行火焰檢測,實際檢測參數見表3。

表3 火焰探測參數指標
1.3.5 智能防撞與避障系統
機器人應當具備在防撞與避障的智能化功能體系,和相關操作系統作為機器人長期穩定運行的重要組成部分。該系統可以不間斷地檢測隧道內的障礙物和人員,同時可以針對實際物體進行精確定位,實現從而實現該系統的主要功能,一旦檢測到出現障礙,機器人能夠進行自動停止并開啟報警操作。該系統同時對斷電期間的制動功能進行了設置,當該機器人在實際運行工作過程中,如果突發故障導致斷電現象的發生,該機器人的移動等可以實現立即停止,從而有效對其進行保護[3]。
2 膠帶運輸智能巡檢機器人現場應用及效果
■2.1 膠帶運輸智能巡檢機器人現場應用
通過在礦山實地現場進行的工業性試驗中可以看出,該類機器人能夠很好地滿足膠帶運輸在運輸安全方面的監控工作實際需求,具有穩定可靠的實際監測性能,具有極高強度的故障識別與判斷能力,能夠及時有效地進行報警操作,且所傳達信息精確有效。該類機器人還在管理層面,創新性地實現了直觀可視化。通過對膠帶運輸的管理系統進行對應建設,實現了以上所描述的各項功能體系。
該類機器人也可在操作界面進行監控的實時性選擇,以及針對歷史數據和相關參數的具體設置,最終能夠對該類巡檢機器人,實現了對膠帶運輸過程的遠程控制、在線監控和遠程操作,并結合現場檢測過程和功能,建立了膠帶運輸通道無人檢測與管理一體化的全新模式。
■2.2 智能帶式輸送機巡檢機器人應用效果
機器人可以合理高效收集聲音,機器人本體上同時具備高清晰度的拾音器和高分貝的揚聲器,可以理解機器人本體與遠程控制終端之間的半雙工通信,并在工作狀態下現場采集聲音,并具有設備異常的聲音識別功能,在發生故障時,設備可通過傳輸系統和控制系統之間的遠程控制和本地緊急制動接口快速懸掛;還可以制定各種應急程序,以自動根據可能特殊情況發送警報和傳輸命令;并將因斷電造成的損失降至最低水平。
該機器人將不同的傳感器組合在一起,并收集來自不同傳感器的信號,這些信號以計算機網絡的形式提供和上傳。無線傳輸將使其能夠克服空間和距離限制,節省電纜安裝工作并降低施工成本。
膠帶運輸方面的智能巡檢機器人,在其自動化程度以及故障處理的速度與效率方面都實現了提升,從而使得工作人員的勞動強度大大降低,減少了由于事故發生所造成的損失,在技術經濟相關效益方面表現得更為良好。在確保了生產安全與穩定的基礎之上,該類機器人還實現了利用自動化模式,從而能夠達到減弱人的作用的目標。
3 結語
該類機器人能夠綜合使用各種傳感器,針對礦山作業客觀環境,以及設備等方面所產生的基礎數據進行收集統計,并將集團大數據分析的高層次優勢,最大程度發揮出來。利用相關大數據算法,能夠對設備運行狀態進行具體判斷與及時掌握,實現了設備的實際性能最大化利用,提高在效率以及準確性層面大大提高。另外該類機器人在礦山生產中的應用,是對“自動化減人”的一種典型的表現形式,降低了在人工方面的成本,使得整體生產中的自動化程度,以及故障處理工作的效率顯著提高。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53