海上平臺用錨機止鏈器運動和受力分析*
2022-08-17 03:46:10韓李萍
甘肅科技 2022年8期
王 芳,趙 健,韓李萍
(蘭州蘭石石油裝備工程股份有限公司,甘肅 蘭州 730314)
止鏈器是海上浮式平臺錨泊的關(guān)鍵設(shè)備,每根錨鏈應(yīng)配備止鏈器用于止住或夾住錨鏈,承受錨鏈拉力,將系泊荷載傳遞至船體結(jié)構(gòu)上,使錨機處于不受力狀態(tài)[1-4]。某海上半潛式平臺共4臺錨機,分別位于主甲板的4個角落。每臺錨機配備2臺具有應(yīng)急釋放能力的可折疊式止鏈器,安裝于平臺的樁腿上,用于錨鏈的制動。錨機采用液壓控制系統(tǒng),既能滿足止鏈器正常工況下的開合,也能滿足緊急工況時的應(yīng)急釋放。經(jīng)調(diào)研發(fā)現(xiàn),應(yīng)急釋放時部分關(guān)鍵零部件易發(fā)生變形、損壞的現(xiàn)象。該類止鏈器為進口產(chǎn)品,結(jié)構(gòu)較復雜,相關(guān)研究資料非常少。在維修和產(chǎn)品優(yōu)化升級時,無理論方法支持。為了確保產(chǎn)品安全可靠,在充分理解止鏈器的連接傳動及工作工況的基礎(chǔ)上,對該型式止鏈器結(jié)構(gòu)進行改進,并對改進后的止鏈器總結(jié)了一套新的分析方法。
1 止鏈器的結(jié)構(gòu)型式
原止鏈器主要由底座、機架、制動臂、棘爪、擺動液缸、伸縮液缸、伸縮液缸活塞桿鎖緊裝置、張力檢測裝置、液壓驅(qū)動系統(tǒng)和電氣控制系統(tǒng)等組成。
底座通過底平面及地腳螺栓安裝到樁腿基座上,在底座下方設(shè)計有止推塊;機架上方設(shè)置有方形導鏈孔,底部設(shè)有導鏈槽供錨鏈通過;擺動液缸通過曲柄驅(qū)動樞軸,使制動臂與樞軸共同轉(zhuǎn)動;伸縮液缸安裝在制動臂背部,由伸縮液缸、連接板、鉸鏈和左右關(guān)節(jié)組成;伸縮液缸為彈簧液缸,常態(tài)下兩關(guān)節(jié)的鉸接點過死點,活塞桿鎖緊裝置將伸縮液缸活塞桿進行鎖緊,并與彈簧共同作用保證活塞桿伸出;棘爪通過伸縮液缸裝置與制動臂連接,棘爪頭部按照錨鏈豎鏈的外形進行加工[5],使棘爪能夠與錨鏈良好嚙合。
在制動狀態(tài)下,伸縮液缸活塞桿處于伸出狀態(tài),兩關(guān)節(jié)的鉸點過死點。此時,伸縮液缸活塞桿若要縮回,需克服非常大的阻力來沖破死點。因此,伸縮液缸活塞桿鎖緊裝置就屬于非必要的冗余結(jié)構(gòu)。經(jīng)過計算后,優(yōu)化了這部分結(jié)構(gòu)。
對優(yōu)化后的止鏈器建立了三維模型,如圖1所示,在三維環(huán)境中模擬零件裝配關(guān)系,并進行干涉檢查。
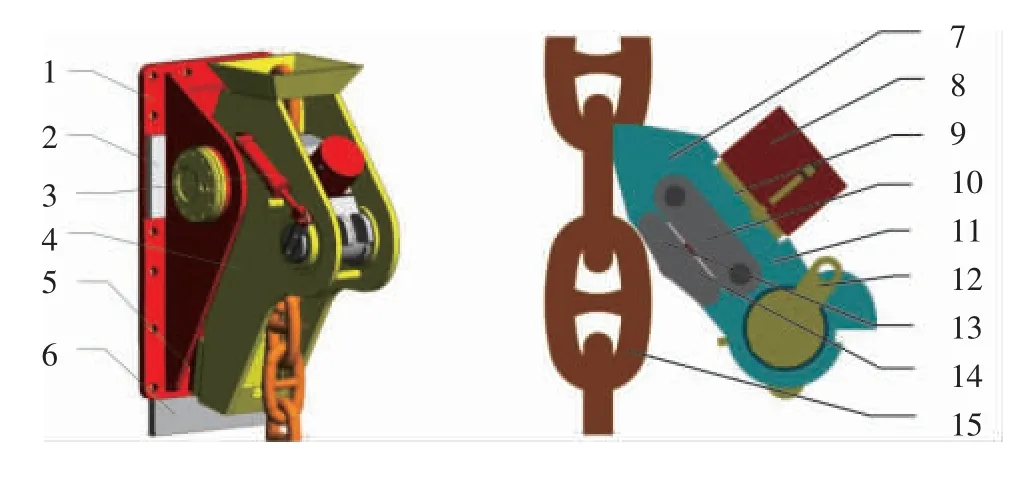
圖1 止鏈器關(guān)鍵零部件及連接傳動
2 止鏈器的運動分析
將三維模型導入仿真軟件中進行運動仿真。模擬液缸及錨鏈在給定速度時的運動及干涉情況。
2.1 止鏈器正常開合
底座和機架作為基體;機架與曲柄之間設(shè)置轉(zhuǎn)動副;曲柄、制動臂、伸縮液缸和棘爪設(shè)為一體,在擺動液缸的驅(qū)動下整體擺動,并設(shè)置錨鏈的速度為V1。
止鏈器需要正常打開時,啟動錨機使錨鏈上提,同時擺動液缸活塞桿以速度V2伸出驅(qū)動曲柄,對應(yīng)制動臂和棘爪以轉(zhuǎn)速ω1整體反轉(zhuǎn)打開,實現(xiàn)止鏈器正常打開,如圖2(a)所示。完成正常打開后,擺動液缸活塞桿繼續(xù)伸出,為錨鏈讓出運動空間。
止鏈器需要正常合上時,錨機上提錨鏈,使被制動的鏈節(jié)位于制動位置上方,同時保證下方的鏈節(jié)不與棘爪干涉。擺動液缸活塞桿以速度V3縮回,制動臂和棘爪整體正轉(zhuǎn)到位后,錨機下放錨鏈,使棘爪與鏈節(jié)嚙合,實現(xiàn)止鏈器制動后錨機剎車。
2.2 止鏈器應(yīng)急釋放
在遇到緊急工況時,錨機來不及上提錨鏈,就需要止鏈器緊急打開。此時,伸縮液缸活塞桿縮回,使兩關(guān)節(jié)的鉸點沖破死點,擺動液缸活塞桿配合伸出。
在制動狀態(tài)下,伸縮液缸保持伸出不動,使得兩關(guān)節(jié)間的銷軸在死點外D1的距離。在應(yīng)急釋放時,伸縮液缸帶動該銷軸縮回至死點內(nèi)D1的距離。這個過程中,其他零件位置保持不變,這就要求連接兩關(guān)節(jié)的三個銷軸設(shè)計合適的尺寸鏈,而該小間隙的變化在仿真軟件中無法仿真。
為了仿真得以進行且不改變主要仿真運動結(jié)果,此仿真模擬直接將左右關(guān)節(jié)間的銷軸設(shè)定在至死點內(nèi)D1的距離;不導入底座和機架,鉸鏈作為基體;制動臂與鉸鏈之間、棘爪與鉸鏈之間設(shè)置轉(zhuǎn)動副;棘爪與左關(guān)節(jié)之間、制動臂與右關(guān)節(jié)之間設(shè)置轉(zhuǎn)動副;左右關(guān)節(jié)之間設(shè)置鉸接;設(shè)定棘爪和制動臂各自的轉(zhuǎn)速ω1、ω2(通過仿真結(jié)果即可得出兩液缸活塞桿的伸縮速度V3、V4)。在仿真運動過程中,注意觀察關(guān)節(jié)與棘爪、棘爪與錨鏈是否存在干涉,并根據(jù)干涉情況調(diào)整ω1和ω2。棘爪與錨鏈脫離后,如圖2(b)所示,伸縮液缸停止動作,擺動液缸活塞桿繼續(xù)伸出,讓出錨鏈下放和起錨的空間。
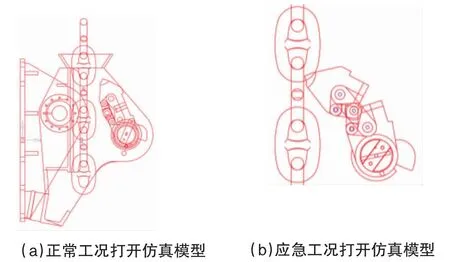
圖2 運動仿真模型
按實際工作工況,模擬了兩種運動仿真,對兩液缸的運動速度進行反復調(diào)整,直至各零件之間、棘爪與錨鏈之間均不存在干涉為止,充分證明該止鏈器能夠?qū)崿F(xiàn)應(yīng)急釋放功能。
3 止鏈器靜力學分析
完成結(jié)構(gòu)設(shè)計和三維模型后,通過Ansys Workbench軟件對止鏈器關(guān)鍵零部件進行仿真分析計算。按照實際連接傳動和受載,處理模型、設(shè)定邊界條件并加載最大拉力載荷。
3.1 載荷的分析
鏈條通過導鏈槽和棘爪固定到機架上,將拉力傳遞給二者。根據(jù)圖解,已知棘爪的支撐力沿樞軸的圓心和上鏈節(jié)下部內(nèi)圓型心的連線方向,且下鏈節(jié)截面圓圓心也位于這條連線上。棘爪受力與水平方向的夾角為α,上鏈節(jié)處于傾斜狀態(tài)。
以上鏈節(jié)為研究對象,力的作用點簡化至上鏈節(jié)下部內(nèi)圓型中心上。只受到棘爪的支撐力F3和下鏈節(jié)的斜拉力F2。根據(jù)二力平衡條件,二力應(yīng)該大小相等,方向相反,且作用在同一條直線上[6],受力分析如圖3(a)所示。
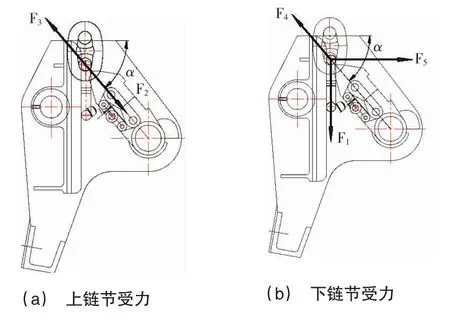
圖3 止鏈器受力分析
以下鏈節(jié)為研究對象,力的作用點簡化至下鏈節(jié)截面圓圓心上。受到其下端錨鏈豎直向下的拉力載荷F1,導鏈槽對其水平向右的支撐力F5,上鏈節(jié)對其斜向上的支撐力F4,受力分析如圖3(b)所示。通過以上分析得出,上鏈節(jié)雖處于傾斜狀態(tài),但并未與導鏈槽接觸,有效地阻止了錨鏈將拉力載荷傳遞至該薄弱區(qū)域。
鏈條給止鏈器的最大設(shè)計拉力F1,棘爪受力與水平方向的夾角α;
棘爪承受的載荷F6與棘爪對鏈條的支撐力F3大小相等,方向相反;
棘爪的支撐力F3和下鏈節(jié)的斜拉力F2大小相等,方向相反;
下鏈節(jié)對上鏈節(jié)的斜拉力F2與上鏈節(jié)對下鏈節(jié)斜向上的支撐力F4大小相等,方向相反;
因此,棘爪承受的載荷F6與F4大小相等,方向相反,棘爪承受的載荷可用公式(1)計算:

機架導鏈槽承受的載荷F7與導鏈槽對下鏈節(jié)水平向右的支撐力F5大小相等,方向相反,機架導鏈槽承受的載荷F,可用公式(2)計算:

3.2 關(guān)鍵零部件的有限元分析
(1)模型處理。在有限元分析中,首先定義各個部件的材料參數(shù)和單元類型,計算選取止鏈器整體結(jié)構(gòu),略去了非主承載結(jié)構(gòu)。使用實體模型建模計算,網(wǎng)格劃分以六面體為主。
(2)邊界條件及載荷加載。止鏈器底座施加Z方向和X方向的位移約束,并約束底座底端-Y軸方向的位移。把上述計算載荷加載到相應(yīng)位置處,如圖4所示。
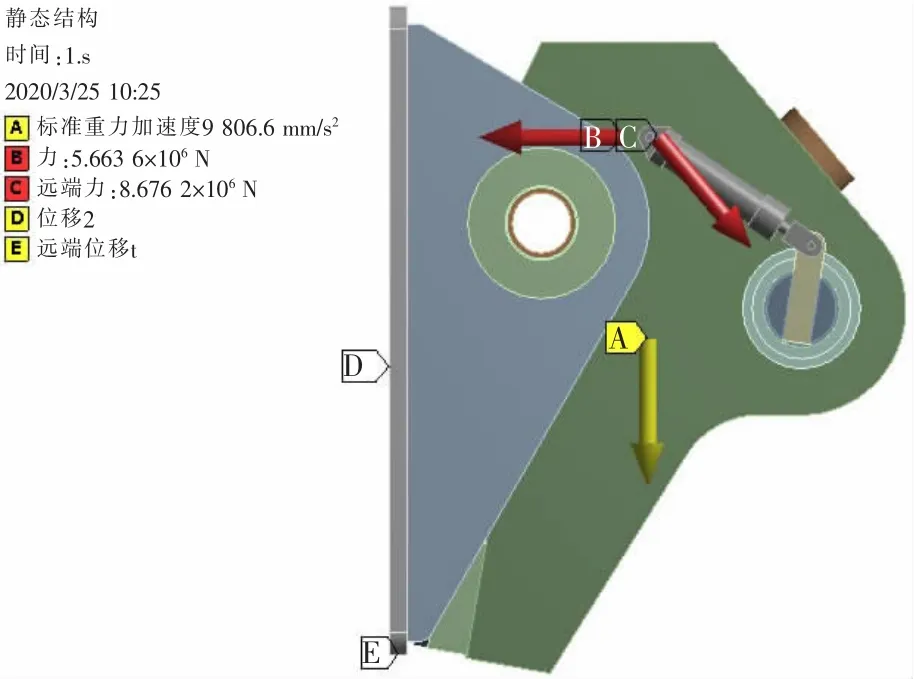
圖4 止鏈器載荷加載及邊界條件
3.3 計算結(jié)果
根據(jù)上述約束設(shè)定和加載計算,得到各關(guān)鍵零件的應(yīng)力計算結(jié)果,見表1。
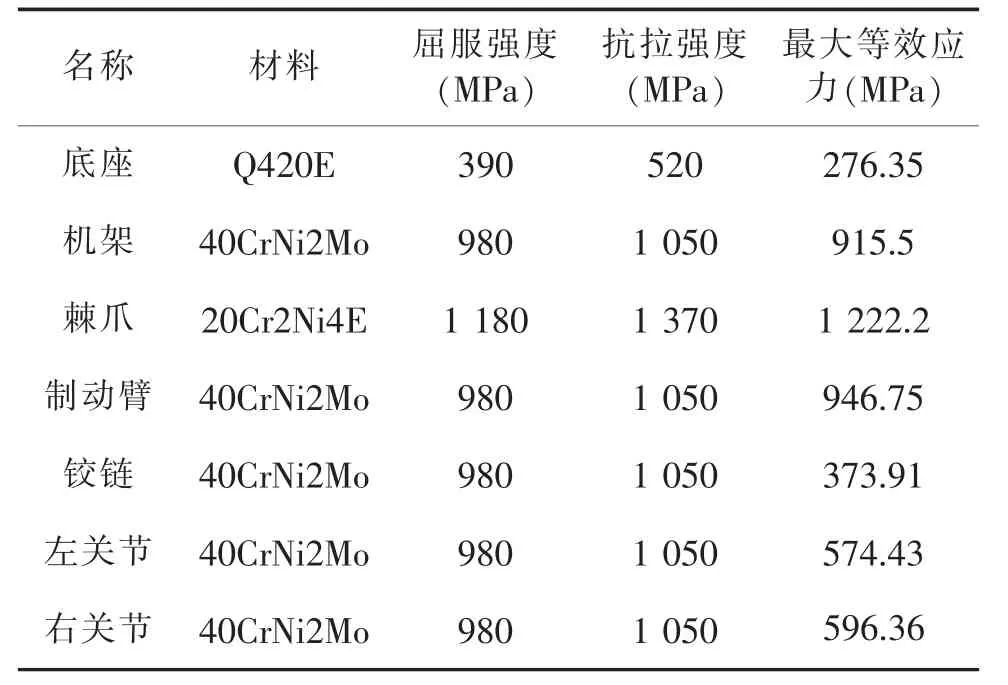
表1 關(guān)鍵零部件應(yīng)力計算結(jié)果
表1給出了關(guān)鍵零件的最大等效應(yīng)力和結(jié)合零件選用材料及厚度的材料性能。依據(jù)《海上移動平臺入級規(guī)范》組合工況下等效應(yīng)力安全系數(shù)1.11[7]。其中棘爪、機架、制動臂最大等效應(yīng)力發(fā)生在接觸區(qū)域表層,小于塑性許用應(yīng)力,接觸表層以外的其他區(qū)域均小于彈性許用應(yīng)力。其余零部件計算出最大等效應(yīng)力值均小于材料許用應(yīng)力值,因此止鏈器關(guān)鍵零件強度滿足設(shè)計要求。
4 試驗
依照《鋼質(zhì)海船入級規(guī)范》中要求,錨機裝置一般應(yīng)安裝有效的止鏈器。止鏈器應(yīng)能承受相當于錨鏈破斷載荷80%的靜拉力,且止鏈器各零件應(yīng)力應(yīng)不大于自身材料屈服點的90%。因此,錨鏈破斷載荷80%的靜拉力,即為止鏈器拉力試驗載荷值[8]。
本試驗設(shè)計了一套錨鏈的拉力試驗裝置,使用一條2.5 m的錨鏈對止鏈器進行正常開合和應(yīng)急釋放試驗[9]。模擬正常開合時,錨鏈處于張緊狀態(tài),一端連在左側(cè)(導鏈孔側(cè))的液壓千斤頂上,另一端連接在右側(cè)液壓千斤頂上,兩千斤頂同向同速向左移動,止鏈器按照正常打開模式進行動作。模擬止鏈器應(yīng)急釋放時,錨鏈一端連在左側(cè)(導鏈孔側(cè))的液壓千斤頂上,另一端連接在右側(cè)液壓千斤頂上,中間某一鏈節(jié)與棘爪嚙合,且棘爪左側(cè)的鏈條處于松弛狀態(tài),為應(yīng)急釋放預(yù)留足夠的長度,右側(cè)千斤頂加壓時錨鏈張緊,止鏈器按照應(yīng)急釋放模式進行動作。
通過試驗,正常打開和應(yīng)急釋放兩種拉力試驗均成功實現(xiàn)打開止鏈器與鏈條脫離,因此,證明該止鏈器可以對錨鏈可靠制動,也能滿足在遇到緊急工況時應(yīng)急釋放。
5 結(jié)論
通過分析,對止鏈器結(jié)構(gòu)進行了優(yōu)化;通過運動仿真,模擬了兩液缸之間的運動配合;通過靜力學計算和有限元仿真,分析了止鏈器各關(guān)鍵零部件的受力和應(yīng)力分布狀況。這為折疊式止鏈器以后的維修和結(jié)構(gòu)優(yōu)化升級提供了分析方法理論支撐,也為國內(nèi)海上平臺系泊領(lǐng)域提供研究支持。
