穿梭車安全控制系統(tǒng)的設計與應用
2022-08-19 14:56:04王冠華蔡榮忠唐敬方譚麗梅徐彩珠
煙草科技 2022年8期
王冠華,蔡榮忠,唐敬方,譚麗梅,徐彩珠
紅云紅河煙草(集團)有限責任公司會澤卷煙廠,云南省曲靖市會澤縣金鐘鎮(zhèn)東郊 654200
穿梭車作為卷煙物流輸送的主要設備在運輸過程中發(fā)揮著重要作用[1-2]。但實際生產中,由于穿梭車的運行軌道區(qū)域未全部封閉,容易出現(xiàn)現(xiàn)場人員穿行或跨越作業(yè)區(qū)域以及物體掉落等問題,存在安全隱患。穿梭車現(xiàn)有的安全聯(lián)鎖裝置包括安全門和急停按鈕,均需人工手動操作才能使穿梭車報警停機。當前因穿梭車運行軌道區(qū)域缺乏檢測裝置[3-4],無法實現(xiàn)自動檢測及停機功能。對此,劉偉等[5]采用條形碼讀碼器和激光測距儀對軌道式穿梭車進行了改造;吳澤樟[6]在穿梭車的前后方分別加裝紅外探測傳感器,利用傳感器信號對穿梭車進行控制;王建成等[7]在穿梭車兩側加裝檢測裝置,實現(xiàn)穿梭車的安全控制;張廣喜等[8]利用工業(yè)攝像機采集運行軌道與穿梭車的圖像數據,以識別運行軌道上是否有異物,同時在軌道兩端四角處分別安裝紅外熱釋電傳感器,用于檢測是否有人員進入運行軌道區(qū)域。上述改進雖在一定程度上降低了穿梭車的安全風險,但檢測功能單一且有局限性,在安全控制方面仍然存在檢測盲區(qū)。激光傳感器技術具有測量精度高、準直性好、抗干擾能力強等優(yōu)點,在精密測量、安全監(jiān)測以及智能控制等領域應用廣泛[9]。其中,溫凱[9]基于脈沖式激光測距原理構建了激光測距系統(tǒng);蘇燕等[10]基于三角測量原理構建測距傳感器并設計了一種激光測距系統(tǒng);張海濤等[11]將陣列探測技術應用于回波信號較弱空間,提高了碎片激光測距的準確率。為此,以紅云紅河煙草(集團)有限責任公司會澤卷煙廠成品高架庫使用的穿梭車為例,采用激光測距、激光陣列檢測等技術設計了一種穿梭車安全控制系統(tǒng),以期提高穿梭車運行安全性能。
1 系統(tǒng)設計
1.1 總體構架
穿梭車安全控制系統(tǒng)由計算機、激光傳感器、測距傳感器、工控攝像頭、單片機、固態(tài)繼電器、音箱等部分組成,其核心是采集激光陣列信號、車輛測距定位以及安全輸出控制,見圖1。系統(tǒng)采集的數據來自激光傳感器、測距傳感器和工控攝像頭。其中,采用激光傳感器構建激光陣列檢測方式,檢測信號通過單片機經模數轉換器轉變?yōu)橛嬎銠C可識別的數字信號;測距傳感器通過串口通信方式(RS-485轉RS-232)接入計算機;工控攝像頭采用USB方式接入計算機。數據處理的核心是計算機,利用Microsoft Visual Studio(美國微軟公司)軟件編程進行運算和判斷;數據通過輸出模塊經數模轉換后驅動固態(tài)繼電器,實現(xiàn)穿梭車的自動啟停、報警提醒并將圖片、日志記錄等信息進行保存。

圖1 穿梭車安全控制系統(tǒng)結構圖Fig.1 Structure of safety control system for shuttle vehicle
1.1.1 激光陣列信號采集
(1)激光陣列布局。由于穿梭車軌道間寬度為90 cm,故采用分布式多點激光檢測方式,即采用6對激光傳感器(KM8LD-200P1型對射式激光傳感器,深圳市興天宇電子設備有限公司)組成一元激光陣列,形成由線到面的檢測區(qū)域,見圖2。6對激光傳感器分別布置在穿梭車軌道始末兩端,始端為發(fā)射端,末端為接收端,發(fā)射端與接收端等高等間距,同一端各激光傳感器間隔20 cm。其中,穿梭車軌道外側布置2對激光傳感器,內側布置4對激光傳感器,故軌道內側的4條激光線可完全覆蓋檢測區(qū)域。根據人體身高及相應尺寸,設定軌道外側激光傳感器安裝高度為40 cm左右,內側激光傳感器的高度距穿梭車車體底部15 cm,避免穿梭車運行時因軌道不平整而遮擋激光線。
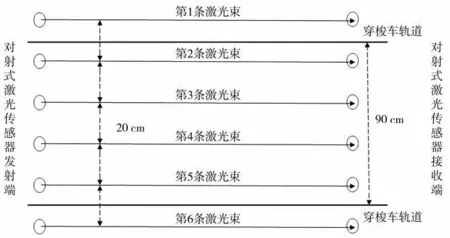
圖2 激光陣列布局示意圖Fig.2 Schematic diagram of laser array layout
(2)信號處理。激光傳感器發(fā)射端與接收端可以形成激光線,6對激光傳感器共有6條激光線,當其中某條激光線被遮擋時,該激光傳感器輸出電壓為0,而未被遮擋的激光傳感器輸出電壓為24 V,故激光傳感器輸出電壓包括0和24 V兩種信號。而單片機信號范圍為0~5 V,為滿足單片機信號采集要求,采用分壓電路對輸出電壓進行規(guī)格化處理,見圖3。根據公式U0=Ui/(R1+R2)R2,當作業(yè)區(qū)域無人員闖入或物體掉落,激光線未被遮擋,輸出電壓Ui為24 V,經過電阻R1和R2分壓后,U0=24/(50+10)×10=4 V;當激光線被遮擋時,輸出電壓Ui為0,經過電阻R1和R2分壓后,U0=0/(50+10)×10=0。因此,激光傳感器輸出電壓可轉換為0和4 V兩種信號,能夠滿足單片機對信號范圍的要求。
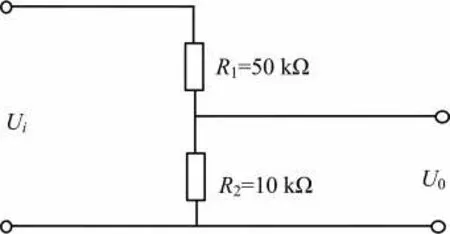
圖3 分壓電路圖Fig.3 Voltage divider circuit diagram
(3)信號采集。由于激光陣列檢測有6路輸出電壓且均為模擬信號,故采用多端口電壓輸入單片機進行數據采集。圖4中,STC90C58AD單片機(上海宏晶科技有限公司)共有8路10位高速A/D轉換器,其A/D轉換口在P1口(P1.0~P1.7),電壓輸入型A/D數量(8路)大于激光陣列電壓輸出數量(6路),能夠滿足激光陣列信號采集要求。選擇單片機中的6路模擬量輸入端(P1.0~P1.5)對接規(guī)格化處理后的激光陣列信號,由單片機對信號進行計算并轉換成計算機可識別的數字信號。計算機與單片機采用串口通信方式(RS-232)進行數據傳輸,可實現(xiàn)激光陣列檢測信號的實時采集和監(jiān)控。
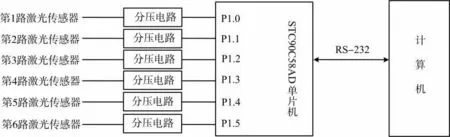
圖4 單片機信號采集線路圖Fig.4 Data acquisition circuit diagram of single chip microcomputer
1.1.2 車輛測距定位
測距傳感器采用集發(fā)射與接收為一體的激光傳感器(型號MSE-LED10,煙臺莫頓測控技術有限公司),與一元激光陣列共同構成二元激光陣列,由發(fā)射端向目標端發(fā)射激光,經目標端反射后返回接收端,采用計時器測定激光從發(fā)射到接收的時間T,已知光速V,可計算得到總行程L,而發(fā)射端到目標端的距離為L/2。圖5中,在穿梭車軌道起始端,將激光測距傳感器安裝在兩軌道正中間位置,并在穿梭車車體上安裝反射板,根據測距傳感器發(fā)出的激光照射到反射板再返回至測距傳感器的時間,可以追蹤定位穿梭車位置并記錄報警停車位置。測距傳感器與計算機采用串口通信方式,由于兩者通信接口不一致,在兩者之間增加一個串口轉換器MODEL 2107C(RS-232至RS-422/485雙向轉換器),將測距傳感器RS-485信號轉換成RS-232信號。計算機將接收的RS-232信號轉換成數字信號并以固定頻率上傳,實現(xiàn)穿梭車位置的實時監(jiān)測和信息更新。
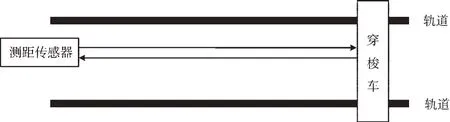
圖5 穿梭車測距定位示意圖Fig.5 Schematic diagram of laser ranging and shuttle vehicle positioning
1.1.3 安全控制
安全控制方式是指一旦檢測到人員闖入或物體掉落到穿梭車作業(yè)區(qū)域時,立刻進行語音報警并停止穿梭車運行。計算機根據激光陣列檢測信號進行判斷,當1條或多條激光信號從高電平向低電平變化時,計算機監(jiān)控軟件輸出數字信號,由輸出模塊進行控制并驅動繼電器,進而控制穿梭車的安全聯(lián)鎖信號,實現(xiàn)穿梭車自動啟停。此外,計算機同步啟動智能語音程序,通過音箱進行安全廣播,提醒人員注意。其中,輸出模塊采用16通道的隔離數字量模塊DAQM-4304(西安舟正電子科技有限公司),輸出通道為NPN集電極開路輸出方式,可直接驅動繼電器,通信方式為485總線。輸出模塊的輸入端RS-485接口與計算機接口無法直接對接,故增加一個串口轉換器MODEL 2107C,將計算機的RS-232信號轉換成RS-485信號,并將RS-485信號傳送至輸出模塊;輸出端與繼電器的24 V線圈相連,繼電器輸出線路與安全開關信號串聯(lián),共同構成安全聯(lián)鎖開關,安全聯(lián)鎖開關一旦觸發(fā),穿梭車立刻停止運行。
農作物種植過程中的病蟲害防治十分重要,甚至直接關系到當年玉米的產量是否會大幅度下降,乃至顆粒無收。目前,我國山區(qū)玉米高產栽培技術應用過程中對病蟲害防治、藥物使用時機、藥物施用計量有較為嚴格的要求,但我國農民普遍存在缺乏系統(tǒng)培養(yǎng)的問題,對于病蟲害的防治方面存在缺失,農民在辨別病蟲害、使用藥物的過程中存在滯后問題和缺乏針對性、有效性的問題,導致病蟲害大面積泛濫、不科學施用藥物導致害蟲產生抗藥性,玉米螟、地老虎、葉斑病等病蟲害的頻繁發(fā)作使玉米高產栽培技術的作用無法有效顯現(xiàn),推廣進度受到阻礙。
1.2 軟件設計
軟件設計在Windows開發(fā)環(huán)境中進行,利用Microsoft Visual Studio(美國微軟公司)軟件編寫源程序,包括系統(tǒng)初始化、視頻采集模塊、激光測距模塊、激光陣列檢測模塊、硬件聯(lián)鎖停機、語音播報、視頻圖片抓拍、事件日志記錄等,程序流程見圖6。首先進行系統(tǒng)初始化,對應用變量、輸入輸出端口等進行定義;當計算機被觸發(fā)時,換算得到各條激光線的電平數據值,當所有激光信號均為高電平“1”狀態(tài)時,表示作業(yè)區(qū)域正常,系統(tǒng)返回繼續(xù)監(jiān)測;當有1條及以上激光信號為低電平“0”狀態(tài)時,表示存在人員闖入或物體掉落到作業(yè)區(qū)域,系統(tǒng)立即輸出停止穿梭車信號,并調用視頻圖片捕捉程序對現(xiàn)場情景進行抓拍和保存,同時將穿梭車停車位置、被遮擋激光線標號、被遮擋激光線數目、事件停機時間等信息合并為1條記錄追加保存,調用相關語音庫內容進行播報;當故障處理完畢后,系統(tǒng)進行延時設備恢復警告及復位穿梭車安全聯(lián)鎖開關,系統(tǒng)返回到繼續(xù)監(jiān)測狀態(tài)。
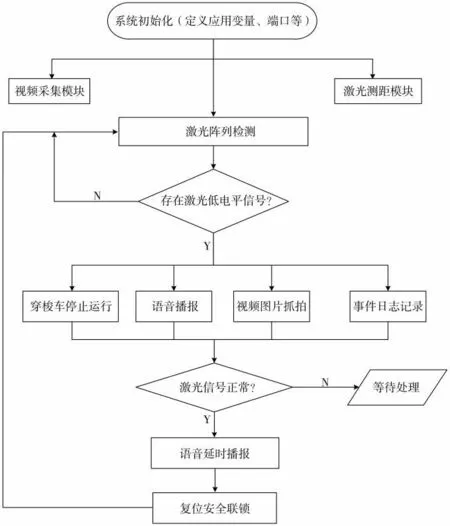
圖6 控制系統(tǒng)程序流程圖Fig.6 Program flow of control system
1.2.1 數據處理
計算機將接收到的單片機數據存儲到一維數組內存空間,每兩個字節(jié)代表1條激光線的信號值。其中,第1條激光線對應數組的1、2字節(jié),第2條激光線對應3、4字節(jié),第3條激光線對應5、6字節(jié),第4條激光線對應7、8字節(jié),第5條激光線對應9、10字節(jié),第6條激光線對應11、12字節(jié)。由于單片機采用的是10位A/D轉換器,可以將模擬量信號轉換為0~1 024(210)的數字量,而單片機可檢測的最大電壓為直流5 V,將其換算為mV則需利用四舍五入函數Round()再乘以1 000,從而得到實際電壓的整數值。因此,激光線電壓數值=Round(((高字節(jié)×256+低字節(jié))/1 024)×5,3)×1 000。將6條激光線對應數組的字節(jié)代入公式進行計算,即可得到各條激光線的電壓數值。計算機根據激光線的電壓數值進行“或門式”程序判斷,若有1條激光線電平進行高低躍變,表明有人員或物體進入作業(yè)區(qū)域;若6條激光線電平均未躍變,表明無人員或物體進入作業(yè)區(qū)域,由此實現(xiàn)對激光線的實時檢測。
1.2.2 痕跡管理
攝像頭在穿梭車運行過程中起到視頻監(jiān)控作用,當穿梭車作業(yè)區(qū)域有物體引發(fā)停機時,計算機監(jiān)控軟件啟動抓拍程序控制攝像頭進行抓拍并上傳至計算機進行保存。利用測距傳感器可檢測穿梭車的停車位置,在穿梭車運行過程中一旦檢測到激光線被遮擋,系統(tǒng)將產生對應的激光線標號、被遮擋激光線數目、穿梭車停機位置、日期時間等信息,并根據事件和日期添加記錄和分類。
1.2.3 設備恢復
檢測到穿梭車作業(yè)區(qū)域無人員或物體時,系統(tǒng)進行延時設備恢復警告及復位穿梭車安全聯(lián)鎖開關。第一次語音警告后,啟動延時程序,延時時間15 s,同時按100,99,98,…,3,2,1,0的遞減順序在監(jiān)控界面進行顯示;當屏幕顯示到數字9時,第二次語音警告,輸出9,8,7,…,0讀數,然后向輸出模塊DAQM-4304發(fā)送接通繼電器的指令,完成安全聯(lián)鎖開關復位;第三次語音警告后,重新啟動穿梭車進行輸送。
1.2.4 監(jiān)控界面與顯示
由圖7可見,系統(tǒng)實現(xiàn)了可視化圖像功能。監(jiān)控界面上方通過工控攝像頭采集現(xiàn)場視頻,可實時動態(tài)顯示穿梭車的運行軌跡。監(jiān)控界面下方可實時顯示車輛測距值以及穿梭車運行位置,能夠模擬顯示6條激光線的檢測狀態(tài),有效區(qū)分“無障礙物阻擋”和“被障礙物阻擋”兩種狀態(tài),紅色表示“無障礙物阻擋”,黑色顯示“被障礙物阻擋”,其中1表示1號激光傳感器,2表示2號激光傳感器,依此類推。
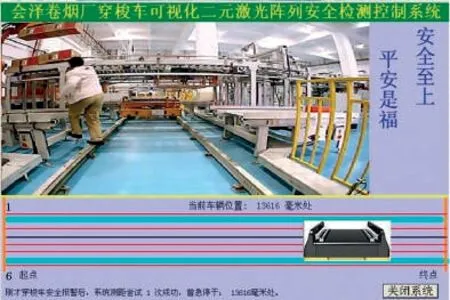
圖7 系統(tǒng)監(jiān)控界面Fig.7 Monitoring interface of the system
2 應用效果
2.1 實驗設計
設備:BZF105型穿梭車1臺(昆明船舶設備集團有限公司);PPC-3708A-N270型計算機1臺(沈陽創(chuàng)想科技發(fā)展有限公司);KM8LD-200P1型對射式激光傳感器6對(深圳市興天宇電子設備有限公司);MSE-LED10型激光測距傳感器1個(煙臺莫頓測控技術有限公司);RER-USBFHD01M型工控攝像頭1個(深圳市銳爾威視科技有限公司)。
方法:以應用于紅云紅河煙草(集團)有限責任公司會澤卷煙廠成品高架庫的穿梭車為對象,采用支架將6對激光傳感器分別安裝在穿梭車軌道兩端,同一端各激光傳感器間隔20 cm;2對軌道外激光傳感器安裝高度為40 cm,4對軌道內激光傳感器安裝高度為10 cm(距穿梭車車體底部15 cm)。在穿梭車軌道起始端,將激光測距傳感器安裝在兩軌道正中間位置,安裝高度為45 cm,并在穿梭車車體上粘貼反射板。將攝像頭安裝在穿梭車前方的安全防護欄上,檢測范圍覆蓋整個作業(yè)區(qū)域;計算機安裝在穿梭車作業(yè)現(xiàn)場,方便在線監(jiān)控。系統(tǒng)安裝調試完畢后投入使用,于2020—2021年對穿梭車安全控制系統(tǒng)進行跟蹤記錄,以驗證系統(tǒng)檢測準確率。
2.2 數據分析
由表1可見,2020—2021年間穿梭車安全控制系統(tǒng)共發(fā)出故障報警11次,經核實無誤報和漏報,并可準確定位穿梭車停車位置及激光線標號,檢測準確率達到100%。
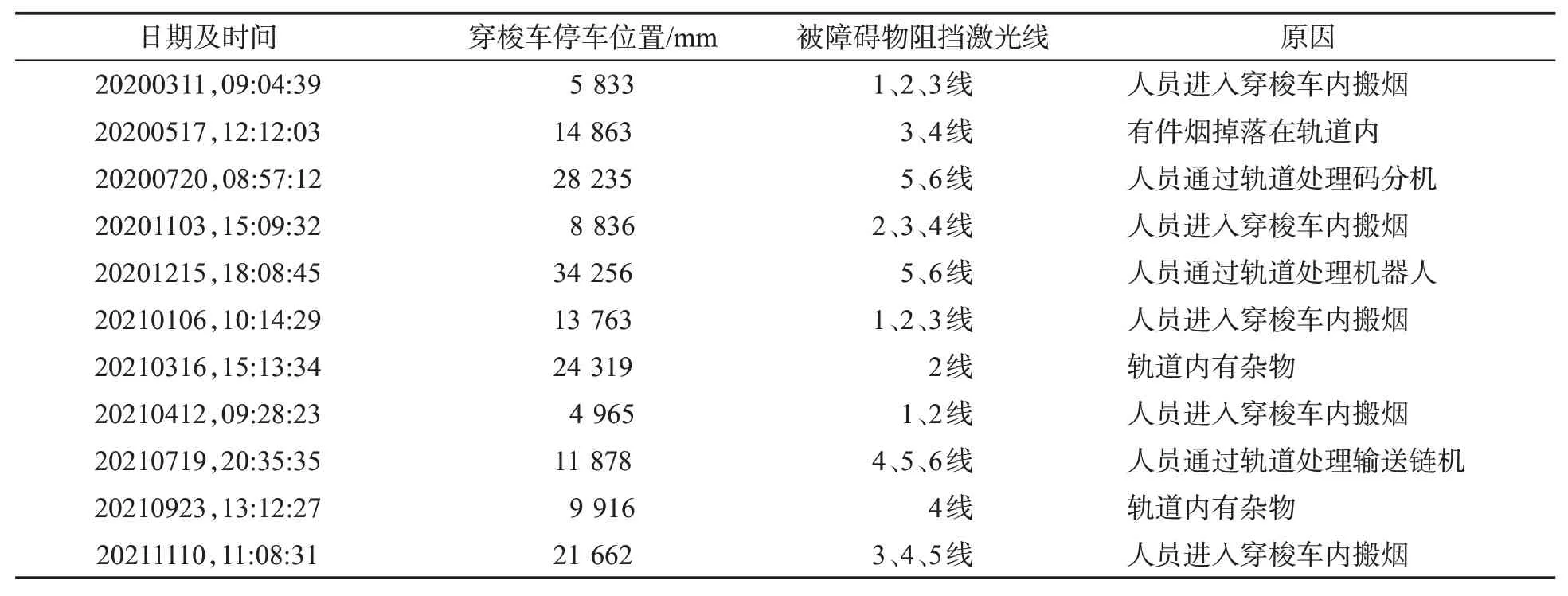
表1 系統(tǒng)故障報警統(tǒng)計Tab.1 Statistics of alarms sent by the system
現(xiàn)場觀察發(fā)現(xiàn),系統(tǒng)在穿梭車作業(yè)區(qū)域形成激光陣列檢測,當有人員或物體進入時,系統(tǒng)立即報警停機,同時播報安全語音提示,監(jiān)控界面顯示提示信息并記錄相關數據;當故障解除后,3次安全語音提示后恢復正常運行。
3 結論
設計了一種穿梭車安全控制系統(tǒng),將分布式多點激光對射與單線激光測距相結合,同時利用視頻采集技術形成可視化的二元激光陣列檢測,實現(xiàn)了穿梭車作業(yè)區(qū)域的在線實時監(jiān)控。以會澤卷煙廠成品高架庫的穿梭車為對象進行測試,結果表明:2020—2021年間穿梭車安全控制系統(tǒng)共發(fā)出故障報警11次,無誤報和漏報,可準確定位穿梭車停車位置及激光線標號,檢測準確率達到100%,實現(xiàn)了穿梭車運行軌道區(qū)域的全覆蓋檢測,有效降低了穿梭車運行安全風險。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
消費導刊(2017年20期)2018-01-03 06:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
