
諧波齒輪傳動的傳動誤差建模與補償
2022-08-23 01:42:38李靜宇
機械工程與自動化 2022年4期
李 平,李靜宇
(1.綿陽職業技術學院 智能制造學院,四川 綿陽 621000;2.沈陽農業大學,遼寧 沈陽 110000)
0 引言
因諧波齒輪傳動兼具結構緊湊、零齒隙、高傳動比、大扭矩、高響應及高傳動精度等結構和運動學特性,故被廣泛應用于高傳動比減速裝置、智能機器人、精密定位裝置及航空航天等眾多領域[1]。諧波齒輪傳動系統一般由剛性內齒齒環(CS)、柔性薄壁外齒齒輪(FS)和橢圓形的波發生器(WG)三部分組成。
包含諧波齒輪傳動的典型設備,通常以半閉環控制系統進行控制,即電機軸的轉速或位置可以由電機軸上的傳感器直接檢測和控制,而負載端的轉速或位置則由具有一定表觀分辨率的傳感器間接控制[2]。由于固有結構誤差和FS的柔性,傳動系統所固有的“角傳動誤差”就具有了非線性屬性,因此在負載端則不能獲得小于傳感器表觀分辨率的理想控制精度[3]。盡管諧波傳動齒輪由于其零齒隙可以顯著減少傳動誤差,但由于FS中的運動誤差和非線性彈性變形引起的角傳動誤差仍然存在,就難免會導致半閉環控制系統的誤差補償能力下降[4]。
本研究將角傳動誤差分為同步分量和非線性彈性分量兩部分,其中同步分量表現為與轉動同步的周期性角傳動誤差,是由齒輪制造過程中固有的結構誤差引起;非線性彈性分量表現為非線性彈性變形引起的具有滯后性的非線性現象[5]。同步分量通常可以被建模為傳動系統轉動角度的周期性振動,因此可以用基于模型的前饋方式來進行補償[6];而非線性彈性分量則通常被認為是機構中的彈性元件引起的無規則振動[7]。更重要的是,非線性彈性分量的非線性彈性屬性可能會使半閉環控制系統的靜態定位精度下降,特別是當負載角為幾十到幾百弧秒(1弧秒=1/3 600°)且要求精確定位的微位移區域,非線性彈性分量引起的負載端角傳動穩態誤差會使執行器不能精確定位[8]。與常規機械振動的動態行為不同,非線性彈性分量引起的靜態定位精度下降現象現在尚未得到很好的研究。
在此背景下,本文提出了一種新的諧波齒輪角傳動誤差精確建模和補償方法,以提高諧波齒輪傳動系統的角傳動精度和靜態定位精度[9]。
1 角傳動誤差數學建模
諧波齒輪傳動系統一般由剛性內齒齒環(CS)、柔性薄壁外齒齒輪(FS)和橢圓形的波發生器(WG)三部分組成,其中WG是在有長短軸的凸輪上套裝柔性薄壁球軸承而成,諧波齒輪結構如圖1所示。其傳動原理為:WG的長軸兩端支撐FS的兩端外齒與CS的內齒嚙合,隨著WG轉動,FS的長短軸位置發生變化,從而改變其與CS的嚙合位置,最終實現大傳動比減速。
諧波齒輪的角傳動誤差θTE通常由電機角位移θM、負載角位移θL及齒輪系數N三者通過下式表達:
θTE=θL-θMN.
(1)
為了提高模型的靜態定位精度,故將角傳動誤差θTE定義為同步分量θSync和非線性彈性分量θHys的總和,并分別進行建模研究。
1.1 同步分量數學建模
同步分量θSync是由FS和CS齒的運動誤差及齒輪和負載軸的裝配誤差引起,所以其與WG、FS和CS的相對轉動同步[10]。通常認為θSync由電機角度的同步分量(θTEM)、FS與WG相對角度的同步分量(θTER)及負載角的同步分量(θTEL)三部分組成[11]。因為閉環檢測系統無法直接檢測負載角θTEL,且與θTEM相比,在同步分量建模中θTEL和θTER可以忽略不計,故只需用θTEM對θSync進行數學建模即可,因此同步分量的數學模型可表示為下式所示的周期性脈動:
θSync=∑nMi=1AM(i)cos[iθTEM+ΦM(i)].
(2)
其中:i為電機角度的諧波階數,i=1,2,…,nM;AM為諧波幅度;ΦM為諧波相位。
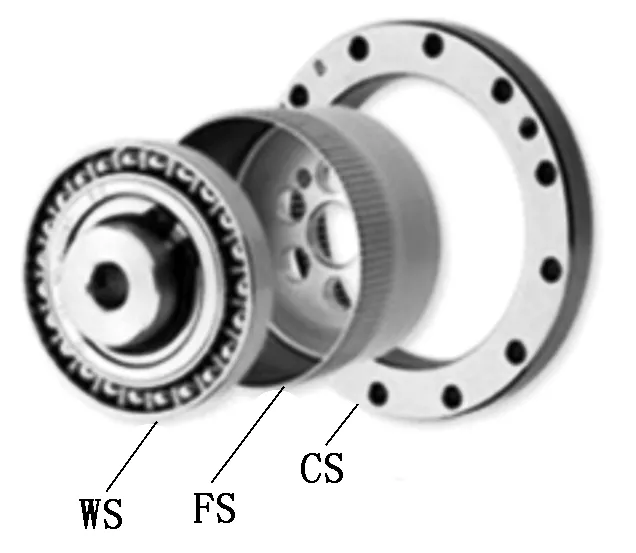
圖1 諧波齒輪結構
按式(2)對同步分量進行MATLAB建模分析,所得頻譜如圖2所示。圖2中,傳動誤差波形由步進幅度為3.6°的電機軸順時針運轉一周的微調運動的電機角位移θM和負載角位移θL表示[12]。在AM(i)和ΦM(i)參數化中,提取了頻譜幅度中的主要分量,如表1所示。

圖2 同步分量的頻譜分析圖

表1 同步分量模型參數
1.2 非線性分量數學建模
為了準確仿真分析模擬諧波齒輪傳動的非線性分量,所以在保證電機軸輸出(0°~180°)±0.6°的正弦角度振幅的同時,提供0.05 Hz的超低頻率,以消除慣性力和動態扭轉共振的影響[13]。采用MATLAB按上述假設進行非線性分量數學建模所得分析結果如圖3所示,圖3(a)和圖3(b)分別展示了順時針方向(順時針方向定義為負值,所以該正弦曲線的對稱軸為-180°)電機軸輸出轉角和負載端傳動誤差在180°、45°和5°三個正弦角度振幅上隨時間的變化曲線。由圖3可知,在10 s、20 s、30 s三個速度反轉點,3個正弦曲線振幅上的傳動誤差均約在0~80弧秒之間變化,且同步分量引起的振動分量僅疊加在了180°和45°的正弦角度振幅上,引起傳動誤差的波動,使其呈不規則波浪線狀,而在5°這個正弦角度振幅上,所得傳動誤差曲線為接近平滑的樣條曲線。

圖3 電機軸輸出轉角和負載端傳動誤差變化曲線
同時對圖3(b)負載端傳動誤差隨時間變化曲線進行Lissajous變換,結果如圖4所示,進一步證明了傳動誤差中的水平波動僅僅是非周期性滯后現象。同時由圖4可推得:
(1) 傳動誤差的非線性彈性分量表現出具有非周期性的滯后特性,在大幅度運動中疊加到了電機角度的周期性同步分量上。
(2) 速度反轉時遲滯曲線的傾斜角度是恒定的,與正弦角度振幅的大小無關。

圖4 電機轉角與負載端傳動誤差的Lissajous圖形
這種非線性特征看起來與傳動系統微位移區域中由彈性變形和滯后屬性引起的滾動摩擦相似,因此,非線性彈性分量θHys在數學上可以由具有非線性彈性變形的滯后模型表示[14]。電機角位移θM和θHys的概念性非線性彈性變形的滯后模型如圖5所示,其中δ為負載端的非線性彈性位移,θoffset為非穩定區的水平波動。由此可推得:
(1) 非線性彈性分量θHys隨電機角位移θM變化。
(2) 存在非穩定區域θr,且該區域中的誤差會隨速度方向變化。
(3) 滯后行為發生在非穩定區域。
基于上述結論,非線性彈性分量θHys的數學模型可表示為速度反轉后與負載端的非線性彈性位移δ相關的公式:
θHys=sgn(ωM)[2θoffsetg(ξ)-θ′Hys] |δ|<θrand|θHys|<θoffset
sgn(ωM)θoffset|δ|≥θror|θHys|≥θoffset.
(3)
且
g(ξ)=12-n[ξn-1-(n-1)ξ]n≠2ξ(1-lnξ)n=2.
(4)
δ=|θM-δ0|.
(5)
ξ=δθr.
(6)
其中:ωM為電機軸的角速度;sgn(ωM)為速度符號函數;n為遲滯寬度;δ0為速度反轉時的電機軸轉角。

圖5 非線性彈性變形的滯后模型
2 數學模型實驗驗證
本節通過phET模擬實驗軟件搭建如圖6所示模擬實驗平臺,對所建立的數學模型進行驗證。其通過角度反饋以典型的半封閉控制系統進行控制,分辨率為8 000脈沖/轉的電機編碼器安裝在電機延長軸上,分辨率為2 880 000脈沖/轉的負載端編碼器通過彈性聯軸器與負載連接,測量并評估負載轉動角度,并輸出角位移。
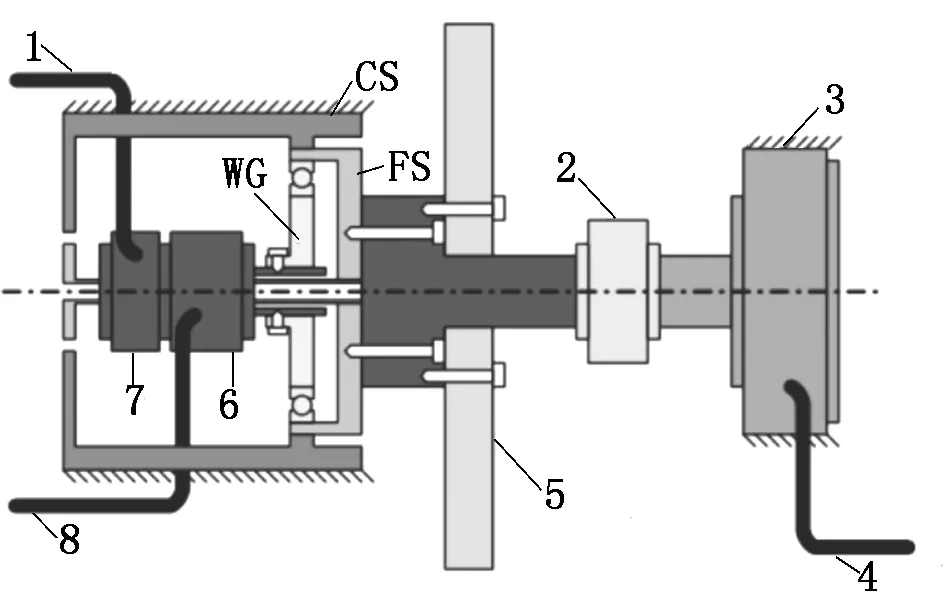
1-反饋信號輸出端口;2-彈性聯軸器;3-負載端編碼器;4-檢測信號輸出端口;5-慣性載荷輪;6-電機;7-電機編碼器;8-控制信號輸入端口圖6 模擬實驗平臺
模擬樣機的傳動比為50,FS的齒數zf=80,CS的齒數zc=82,且電機軸上電機和負載間的慣性比為1∶3[15]。
2.1 同步分量的模擬實驗驗證
通過模擬實驗得到同步分量的實驗波形(實線)和MATLAB建模分析預測波形(虛線)比較如圖7所示,其中負載角(橫軸)循環往復了3次。由圖7可知,該模型可以精確預測傳動誤差的同步分量。

圖7 實驗和模型中同步分量的波形比較
2.2 非線性分量的模擬實驗驗證
將MATLAB分析得到的響應波形與模擬實驗得到的波形進行反復比較,然后對數學模型的自由參數進行優化,最后確定的自由參數如表2所示。最終模擬實驗所得波形(實線)和MATLAB建模分析預測波形(虛線)中角度傳動誤差和滯后特性的比較波形如圖8和圖9所示。

表2 自由參數值

圖8 傳動誤差隨驅動角度的變化曲線

圖9 傳動誤差隨時間的變化曲線
由圖8和圖9分析可得,非線性分量模型可以精確地預測角傳動誤差,驗證了所提出數學模型的正確性。
3 角傳動誤差補償方法建立及模擬試驗
本節主要是以上節新建的傳動誤差預測數學模型為基礎編制控制程序,并將其整合到定位控制系統中,對傳動誤差引起的穩態角誤差進行精確的前置補償,控制系統中角傳動誤差的補償方案如圖10所示。補償角輸入值為:
Nθ*TE=N(θSync+θHys).
(7)
其中:N為齒輪系數;θ*TE中的上標*表示反饋量,其基本含義與θTE相同,只是與輸出量進行區分。
如圖10所示,補償后系統的最終輸入值是從原始電機原始角位移輸入值θ*M中減去Nθ*TE得到的。在模擬實驗驗證中,在順時針和逆時針方向分別做了間隔周期為2 s的240步微步運動,其中為確保每次微步運動都能為同步分量提供不同角傳動振幅的傳動誤差曲線,所以步進電機的點動步進幅度設為43.56°。

圖10 角傳動誤差的補償方案
設定目標角度為0弧秒且疊加了240次微步運動,在模擬實驗平臺上進行順時針方向的模擬實驗,并隨后利用MATLAB中的Simulink模塊進行編程和圖像處理,得到其電機端和負載端角度響應穩定性波形,如圖11和圖12所示。由圖11(a)和圖12(a)的響應曲線可推得:傳動誤差僅會激起負載端的穩態誤差,而對電機輸入端無明顯影響,在負載端角度穩定的過程中及電機和負載端角度出現瞬時的過沖或欠沖時,因角度傳動誤差會隨第1節中分析的角度而變化,故會出現散射響應。圖11(a)、圖12(a)沒有進行任何補償,穩態角附近角度散射嚴重;圖12(b)和圖12(c)的單分量建模補償,僅在很低程度上削弱了穩態時的角度散射;如圖12(d)所示,與上述圖片相比,在雙分量補償的情況下,電機角度精確地定位到了目標角度,且雙分量綜合補償模型極大降低了穩態時的角度散射,從而有效抑制了負載端的穩態誤差。同時,逆時針方向的負載角度響應的穩定性波形如圖13所示。逆時針方向轉動的分析波形與順時針方向相同,再次驗證了數學模型和補償方法的正確性。

圖11 順時針轉動穩定時電機端角度的放大響應波形
為了定量驗證模型的補償性能,每次試驗都通過Origin作圖評估分析了負載端角度穩態誤差的統計值3Δ(正態分布中的3Δ原則)和平均值,如表3所示。表3中每個項目中的第一行表示絕對值,第二行表示由沒有補償的值進行歸一化處理后的相對值。
由3Δ的統計結果分析可得,將雙分量補償數學模型應用到新補償方法中,可以成功將穩態時的角度散射降低40%,大大抑制了負載端的穩態誤差,增加了諧波齒輪傳動系統的角傳動精度和靜態定位精度。
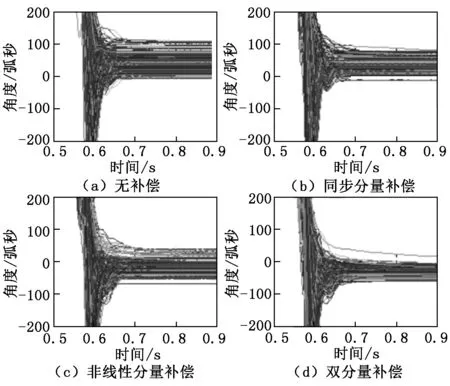
圖13 逆時針轉動穩定時負載端角度的響應波形

表3 負載端角穩態誤差的統計值和平均值
4 結論
本文提出了一種諧波傳動齒輪角傳動誤差及靜態定位誤差的數學模型及補償方法,其對靜態定位精度在穩定時的性能提升尤為明顯。在建模過程中,根據角傳動誤差在微位移區域表現為周期性脈動和具有滯后特性的非線性特性,將角傳動誤差分為同步和非線性彈性兩個分量。因此,通過對旋轉角度的頻譜分析方法,完成了同步分量的數學建模;基于具有滯后特性的滾動摩擦建模框架的新數學公式被應用于非線性彈性部件理論,完成了非線性彈性分量的數學建模。將提出的傳輸誤差模型作為基于模型的前饋補償,應用于諧波齒輪傳動的半閉環式控制系統的定位系統中,并進行了模擬試驗驗證。
一方面,使用仿真軟件模擬實驗室定位裝置進行了數值模擬和模擬實驗,驗證了所提出的數學模型和補償方法的正確性。另一方面,通過微步運動進行了模擬定位試驗,以建立的誤差數學模型為基礎,以創新的誤差補償方法為手段,成功補償了角傳動的穩態誤差。3Δ定量統計表明,穩態時的角度散射降低了40%,大大抑制了負載端的穩態誤差,提高了靜態定位精度,最終證明了數學模型和補償方法的正確性。
