
智能堆碼起重機(jī)器人電控系統(tǒng)的設(shè)計
2022-08-23 01:42:50毛怡琳張鳳濤陳塏格王鈴凱
機(jī)械工程與自動化 2022年4期
毛怡琳,張鳳濤,王 菁,陳塏格,王鈴凱
(長春師范大學(xué) 工程學(xué)院,吉林 長春 130032)
0 引言
為實(shí)現(xiàn)“工業(yè)4.0”和“中國制造2025”,越來越多的產(chǎn)業(yè)開啟了信息化和工業(yè)化兩化深度融合,以加快智能工廠在工業(yè)行業(yè)領(lǐng)域的應(yīng)用。智能工廠是實(shí)現(xiàn)智能制造的重要載體,不同行業(yè)建設(shè)的智能工廠的重點(diǎn)內(nèi)容、發(fā)展模式和突破環(huán)節(jié)各有不同[1]。為探求智能起重機(jī)在智能工廠上的應(yīng)用,設(shè)計研發(fā)了基于機(jī)器視覺技術(shù)的智能堆碼起重機(jī)器人,本文主要對智能堆碼起重機(jī)器人電控系統(tǒng)進(jìn)行了設(shè)計。
1 智能堆碼起重機(jī)器人電控系統(tǒng)總體設(shè)計
該智能堆碼起重機(jī)器人可完成箱裝牛奶的分類、抓取、搬運(yùn)和碼垛等工作。采用門形結(jié)構(gòu)設(shè)計可保證機(jī)器人提起重物后行走時重心平穩(wěn),通過視覺傳感器完成箱裝牛奶的類型識別及搬運(yùn)路徑的自主規(guī)劃,采用前后雙臂升降機(jī)結(jié)構(gòu)設(shè)計使得機(jī)器人每次可提起兩箱牛奶,減少往返行走次數(shù),提高了機(jī)器人的工作效率。更加輕量化的設(shè)計使得機(jī)器人體型不斷縮小,從而節(jié)省原材料,對動力的需求也就更少,更加低碳環(huán)保[2]。
為滿足以上要求,設(shè)計了該智能堆碼起重機(jī)器人電控系統(tǒng)整體方案,如圖1所示。
2 智能堆碼起重機(jī)器人重要組成部分電路設(shè)計
2.1 控制器的選取
根據(jù)整體設(shè)計方案,該控制系統(tǒng)共需要45個IO,其中包括4個PWM、4個外部中斷、2個UART、1個定時器等資源,其余為基本IO功能,因此在選擇控制器時,單片機(jī)51系列沒有找到適合的CPU,縱觀Arduino系列最適合的只有Arduino MEGA2560單片機(jī)。因此Arduino控制器選擇了Arduino MEGA2560開發(fā)版為控制核心。
2.2 起重裝置電路設(shè)計
起重裝置是該機(jī)器人最重要的組成部分,它能夠完成對箱裝牛奶的抓取、提起、下放、松開等一系列動作。為提高工作效率,采用前后雙臂升降機(jī)結(jié)構(gòu)設(shè)計方案。機(jī)器人首先移動到貨物的正上方,升降電機(jī)開始下放升降桿直到垂直限位被觸發(fā);然后,水平方向的步進(jìn)電機(jī)反向旋轉(zhuǎn)直到水平限位被觸發(fā),此時系統(tǒng)處于復(fù)位狀態(tài);步進(jìn)電機(jī)正轉(zhuǎn)使抓手垂直伸入拎手的內(nèi)部,當(dāng)抓手伸入到指定位置時,反射式光電開關(guān)被觸發(fā)輸出低電平給單片機(jī),使單片機(jī)感知該反饋信息,步進(jìn)電機(jī)停止,同時啟動升降電機(jī)將物體向上提起,單片機(jī)通過對光柵產(chǎn)生脈沖計數(shù),并實(shí)時計算上升高度,將物體準(zhǔn)確運(yùn)送到指定高度后停止,這樣就完成了貨物抓取和起重過程。下放和松開動作與上述流程正好相反。

圖1 智能堆碼起重機(jī)器人電控系統(tǒng)整體設(shè)計方案
當(dāng)兩套升降裝置的升降桿位于底部,將觸發(fā)垂直限位開關(guān)1和2,表示豎直運(yùn)動初始位置。升降桿上升過程中光柵得到連續(xù)脈沖觸發(fā),CPU根據(jù)脈沖數(shù)量可實(shí)時計算上升高度(位置信息),從而形成閉環(huán)反饋。光柵檢測電路如圖2所示。
當(dāng)機(jī)械手水平移動到最左端,將觸發(fā)水平限位開關(guān)1和2,表示水平運(yùn)動的初始位置。由于步進(jìn)電機(jī)運(yùn)行的步數(shù)與位移成正比,可通過程序?qū)崟r計算水平位移(位置信息)。
當(dāng)機(jī)械手鉤住貨物的提手后,抓取反饋傳感器將輸出低電平,表示抓取成功。抓取反饋電路結(jié)構(gòu)同光柵檢測電路,只不過光柵檢測使用遮擋方式,而抓取反饋使用反射方式。
升降電機(jī)采用DC12 V、10 r/min的減速電機(jī)控制,共2個,需要1片L298P進(jìn)行驅(qū)動,如圖3所示。平移電機(jī)采用DC12 V、步距角1.8°的步進(jìn)電機(jī),共2個,需要2片A4988芯片控制,如圖4所示。

圖2 光柵檢測電路

圖3 直流電機(jī)控制電路

圖4 步進(jìn)電機(jī)控制電路
2.3 機(jī)器人底盤控制電路設(shè)計
該裝置對于平穩(wěn)性、靈活性有一定要求,在設(shè)計控制電路時,選擇了4個直流減速電機(jī)連接4個麥克納姆輪作為機(jī)器人底盤。麥克納姆輪也稱為全向輪,四驅(qū)方式可方便實(shí)現(xiàn)前后、左右、斜45°等8個方向的平移以及原地旋轉(zhuǎn)等動作。
雖然該裝置的靈活度有一定保證,但當(dāng)負(fù)載較重或分配不均時,四驅(qū)車走直線需要程序不斷矯正,因此選擇DC12 V、330 r/min、減速比為1∶16的直流減速電機(jī),每個電機(jī)自帶2路編碼器,可作為速度和方向反饋,利用PID算法使得每個電機(jī)能夠做到恒速控制,這樣可保證機(jī)器人直線運(yùn)動偏差較小。
同時每片L298P可控制兩個直流電機(jī),每個電機(jī)需要2個IO控制方向、1個PWM控制轉(zhuǎn)速;每個電機(jī)有2路編碼器反饋,其中一個接外部中斷,另一個接普通IO,配合內(nèi)部定時器(5 ms左右)使用PID算法可完成每個電機(jī)的恒速控制。兩路底盤電機(jī)的控制電路如圖5所示。

圖5 兩路底盤電機(jī)控制電路
2.4 顏色及形狀識別電路
顏色識別可以使用TCS230等模塊完成,但沒有方便有效的傳感器能夠準(zhǔn)確快速識別圓形、方形、三角形等形狀。因此該系統(tǒng)中使用了OpenMV4視覺傳感器模塊,通過Python語言編寫算法程序,可同時完成顏色和形狀的檢測。由于OpenMV4上集成了一片STM32F7系列的單片機(jī),可通過Uart與Arduino控制器通信,將檢測信息傳送回來。在機(jī)器人前進(jìn)過程中,視覺傳感器還可以檢測地表特定顏色標(biāo)識線,即承擔(dān)尋跡傳感器的角色。
2.5 顯示電路設(shè)計
LCD12864是一款128列64行的點(diǎn)陣液晶顯示屏,能夠同時顯示16列4行(即64個)字符數(shù)。若選擇帶字庫的LCD12864模塊,可最多顯示8列4行(即32個)漢字?jǐn)?shù)。有并行驅(qū)動和串行驅(qū)動兩種方式可供選擇,為節(jié)省控制器IO使用數(shù)量,本系統(tǒng)選擇使用串行驅(qū)動方式,只需要3個IO接口,工作速度完全符合設(shè)計要求,其接口電路如圖6所示。
液晶顯示器的15引腳接GND表示串行方式,19、20引腳分別接VCC和GND,使得該液晶顯示器的背光處于常亮狀態(tài),Arduino單片機(jī)的35、36、33端口分別控制LCD12864的RE、RW、EN實(shí)現(xiàn)串行顯示。
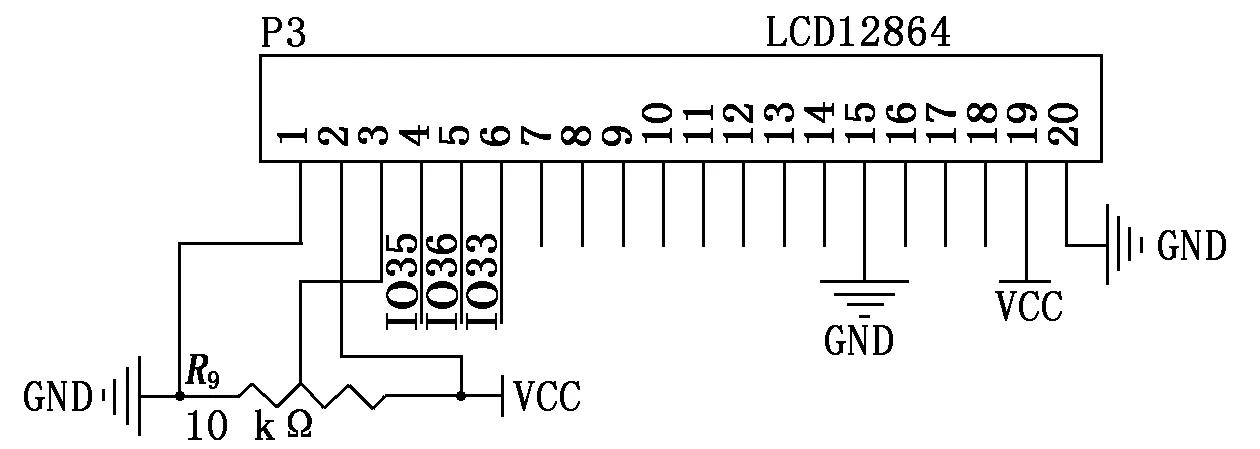
圖6 LCD12864接口電路
3 工作原理分析
執(zhí)行部分由4個直流減速電機(jī)連接4個麥克納姆輪構(gòu)成,對于空間相對較小的室內(nèi)場景,基于麥克納姆輪的移動機(jī)器人可以實(shí)現(xiàn)全方向無約束的運(yùn)動,具有良好的機(jī)動性和靈活性[3],因此利用麥克納姆輪全方位移動方式加上位于機(jī)輪周邊輪軸的中心輪,使得起重機(jī)裝置在運(yùn)行時能夠每一面都為正方向行駛而且能實(shí)現(xiàn)前后左右等8個方位的運(yùn)動。
起重機(jī)從初始位置開始運(yùn)行,首先通過OpenMV機(jī)器視覺模塊進(jìn)行檢索,尋找需要裝載的物體。確認(rèn)貨物后,該裝置停靠在貨物周邊,控制核心控制卷揚(yáng)機(jī)將起重裝置下放;在起重機(jī)豎直底部留有起限位作用的行程開關(guān),當(dāng)起重裝置到達(dá)豎直方向上最大運(yùn)動距離后,底部垂直限位開關(guān)打開,此時起重裝置在豎直方向上留有大于一個生產(chǎn)線上牛奶箱高度大小的空間,通過控制A4988芯片高低電平的輸入使步進(jìn)電機(jī)正反轉(zhuǎn),起重裝置小范圍運(yùn)動;在取物裝置處設(shè)有抓取反饋開關(guān)及水平限位開關(guān),水平限位開關(guān)限制水平方向上的最大位移,抓取開關(guān)檢測牛奶箱是否被有效抓取,若牛奶箱手柄未置于抓取裝置上或者只有部分在抓取裝置上,在此狀態(tài)下的抓取反饋開關(guān)閉合;只有當(dāng)水平垂直限位開關(guān)及抓取反饋開關(guān)同時打開時,OpenMV機(jī)器視覺模塊才確認(rèn)抓取,并將信息反饋給控制核心,光柵計數(shù)器輔助控制核心操控兩個升降電機(jī)上升。
起重機(jī)在信息采集時啟用OpenMV機(jī)器視覺模塊,通過Python語言進(jìn)行編程。OpenMV機(jī)器視覺模塊通過自身算法,在運(yùn)行過程中對貨物進(jìn)行識別和距離檢測。OpenMV機(jī)器視覺模塊還具有循跡功能,根據(jù)地面上鋪設(shè)的軌跡路線,裝置在指定場地中行進(jìn)循跡。到達(dá)卸貨位置后,卸貨流程與起重流程類似。
4 結(jié)束語
從起重機(jī)械行業(yè)的增速來看,中國起重工業(yè)已經(jīng)實(shí)現(xiàn)了產(chǎn)值和出口量的增加以及產(chǎn)品產(chǎn)量的提升,它們不僅顛覆了傳統(tǒng)制造業(yè)的生產(chǎn)模式,也描繪了制造企業(yè)未來的發(fā)展前景,甚至正在催生新的經(jīng)濟(jì)價值。以工業(yè)驅(qū)動生產(chǎn),以智能推動發(fā)展,部署先進(jìn)的自動化技術(shù)和物聯(lián)網(wǎng)技術(shù),完成人工智能機(jī)器人在生產(chǎn)運(yùn)輸?shù)拳h(huán)節(jié)的全面高效利用,將會成為現(xiàn)階段企業(yè)轉(zhuǎn)型和制造業(yè)發(fā)展的重要步驟。本文闡述的設(shè)計方案,將為其他輕小型起重機(jī)器人的機(jī)械結(jié)構(gòu)設(shè)計以及控制系統(tǒng)的設(shè)計等提供參考。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
