永磁同步電機全速域無傳感器控制
2022-08-25 14:16:42桂永麟于新紅
微特電機 2022年8期
桂永麟,于新紅
(中國科學院海西研究院 泉州裝備制造研究中心,現代電機控制與電力電子實驗室,泉州 362200)
0 引 言
永磁同步電機(以下簡稱PMSM)具有效率高、調速范圍大、功率密度高等優點[1],在工業上受到廣泛關注。基于無傳感器PMSM驅動系統無需位置傳感器,具有低成本、高可靠性和無安裝空間等優點,可進一步提升電機驅動系統的緊湊性及功率密度。然而,無傳感器驅動系統還無法滿足高精度高動態響應速度的應用場合和要求[2-4],其綜合性能還有待進一步提升。為了解決上述問題,越來越多的學者對PMSM全速域無傳感器控制技術進行了深入研究。
低速域高頻注入閉環控制的傳統算法主要包括高頻電流信號注入法和高頻電壓信號注入法,其主要區別在于注入高頻信號的不同以及注入方式的區別[5-8]。高頻電流信號注入法通過注入高頻電流信號,通過高頻響應電壓得到轉子位置信息,該方法受限于PI參數的準確性[5]。在高頻電壓信號注入法中,高頻旋轉電壓注入法利用注入旋轉的高頻電壓信號,對負序電流中的轉子位置信息進行提取,雖然算法較為通用簡單,但難點在于高精度的電流采集,同時大量濾波器的使用降低了系統動態性能[6]。而高頻脈振注入法利用電感磁飽和效應(飽和凸極效應)產生的交、直軸電感不等現象,提取交軸電流中的轉子位置信息,然而此類方法同樣具有動態性能差、系統帶寬降低等問題。針對此類濾波器的大量使用所帶來的問題,常用注入高頻方波電壓的方法來解決。該方法通過注入開關頻率等級的高頻方波電壓,從交軸上的高頻響應電流中提取有效信息,再直接通過對相鄰采樣電流作差獲取高頻響應電流的包絡信號,從而避免了提取轉子位置時對濾波器的使用[7]。
中高速階段常采用基于基波數學模型的位置估計算法,包括模型參考自適應法[8]、擴展卡爾曼濾波[9-11]、滑模觀測器[12]等。其中模型參考自適應法通過模型自適應機制,將可調模型收斂跟蹤至參考模型,然而此類方法對參數依賴性強,并且對反饋系統的依賴性有一定要求。擴展卡爾曼濾波法通過最優線性估計的策略,對增益矩陣進行設計,雖然不依賴電機本體參數,但算法復雜、計算量大,實時性要求高。相較于這些算法,滑模觀測器(以下簡稱SMO)具有運算量小、魯棒性強等特點,被廣泛應用,該方法通過構造滑模面,根據誤差信號調整輸入從而實現轉子角度的穩定跟蹤。
本文提出一種全速域高性能PMSM 無位置傳感器控制策略,針對上述問題,低速域采用改進型正交方波電壓信號注入位置估計方法,在減少濾波器使用的基礎上降低了直流偏置帶來的影響。中高速域提出基于擴展電動勢模型的高階SMO方法實現算法簡單、魯棒性高的無傳感器控制策略。并通過滯環平滑切換策略,保證在多工況下對于位置、速度的閉環穩定控制。
1 全速域混合位置估計策略
1.1 改進型α,β軸方波注入位置估計方法
在d,q旋轉坐標系中,PMSM的數學模型如下:
(1)
式中:ud和uq分別為d,q坐標軸下的電壓;id,iq分別為d,q坐標軸下的電流;Rs為定子電阻;ψf為永磁體磁鏈;ωe為電角速度;Ld,Lq分別是d,q坐標軸下的定子電感參數;p為微分算子。
根據電壓電感的特性,在高頻電壓信號頻率遠大于基波電壓頻率的情況下, PMSM 數學模型可等效為電感負載,式(1)可簡化:
(2)
將平均電感、差分電感分別定義為∑L=(Ld+Lq)/2,ΔL=(Ld-Lq)/2。將式(2)變換至α-β靜止坐標系,可得高頻注入信號下電機模型:
(3)
式中:iαh,iβh為高頻響應電流分量;θ為實際轉子位置角度。
注入的高頻電壓信號vαh和vβh如下:
(4)
式中:n=1,2,3,4,…。
為了從電流中提取出轉子位置信號,需要對電流信號進行解調。為了方便表達,首先定義:
(5)
將式(5)代入式(4)得:
當t=nT時
(6)
當t=T/4+nT時
(7)
當t=2/T+nT時
(8)
當t=3/4T+nT時
(9)
由上式可知,與傳統的高頻注入法相比,高頻分量可由方波特性通過電流信號解調得出,避免了濾波器的使用,提升了系統動態性能;同時新型方波的設計,替代了常規解調中轉子位置信息與電機的參數的相關性。最后轉子位置信息由反正切函數直接得出,解決了傳統方法中鎖相環處理信號帶來的帶寬增加問題。
1.2 高階SMO位置估計方法
靜止坐標系下包含轉子空間信息的PMSM狀態空間方程可寫成下式:
(10)
式中:ωe為電角速度;Ld,Lq為定子電感;[uαuβ]T,[iαiβ]T為定子電壓、定子電流;凸極反電動勢可定義:
(11)
(12)
根據式(11)和式(12),將電流和擴展電動勢轉化為狀態變量的高階狀態方程:
(13)

A11=-R/Ld·I+ωe(Ld-Lq)/Ld·J;
A12=-1/Ld·I;A22=ωe·J;B1=1/Ld·I;
在傳統方法中,根據滑模控制函數提取轉子位置時,常在二階SMO中假定電動勢導數項為零,因此系統的動態響應性能有限。為了提高系統魯棒性,增加對反電動勢的觀測項。基于式(13),高階SMO可描述:

(14)
式中:l1、l2、m1、m2為參數增益;
將式(14)減去式(13),擴展電動勢的誤差動態可表示
(15)
1.3 高階SMO穩定性分析
為了分析高階SMO的收斂性,選擇Lyapunov函數作為參數:
別呦呦把手伸到我腋窩,我怕癢,醒了。一睜眼,天早亮了,不知從哪傳來幾聲鳥叫,有團霧從我眼前飄過,我伸手抓,抓住了,又讓它溜走了。
(16)
對其求導可得:

(17)
為保證系統收斂且提升SMO對干擾和參數突變的魯棒性,應滿足:
(18)
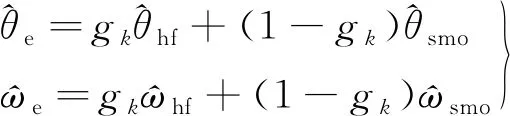
基于此,由對微分轉子位置的估計值,可計算估計速度ωe。通過低通濾波器對估計速度進行濾波,以減少干擾的影響。通過適當設計m1和m2,估計的擴展電動勢可以近似地收斂到真實電動勢。因此,擴展電動勢誤差可看作為時不變系統,當速度收斂時,反電動勢也收斂至實際值,在降低抖振的同時,進一步增強了系統的魯棒性。
1.4 滯環平滑切換策略
常規切換方法以加權算法控制策略為主,通過設計權重,并按照線性組合的方式,過渡階段由兩種方法加權決定。由于兩種方法位置估計的理論方法、抗干擾能力及轉速估計穩態誤差存在差別,當算法出現切換區間過窄或工況復雜導致轉速大幅度振蕩的情況時,轉速會在切換區間對兩種速域的方法進行反復切換,增加系統的運算量,甚至導致系統控制失效。因此本文采用滯環平滑切換策略,保證整體算法在低速域與高速域之間平穩切換。如圖1所示,其中切換所采用的過渡策略表達式:
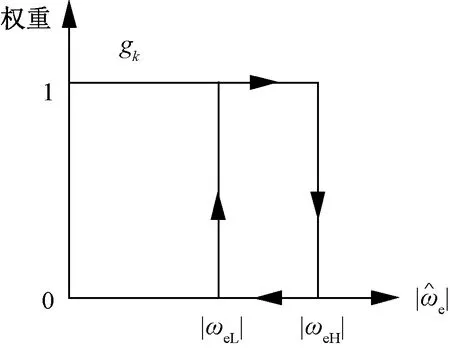
圖1 滯環函數
(19)
2 仿真及結果分析
為驗證全速域混合位置估計策略的有效性及可行性,在MATLAB/Simulink中對算法進行仿真驗證,PMSM仿真參數如表 1 所示。
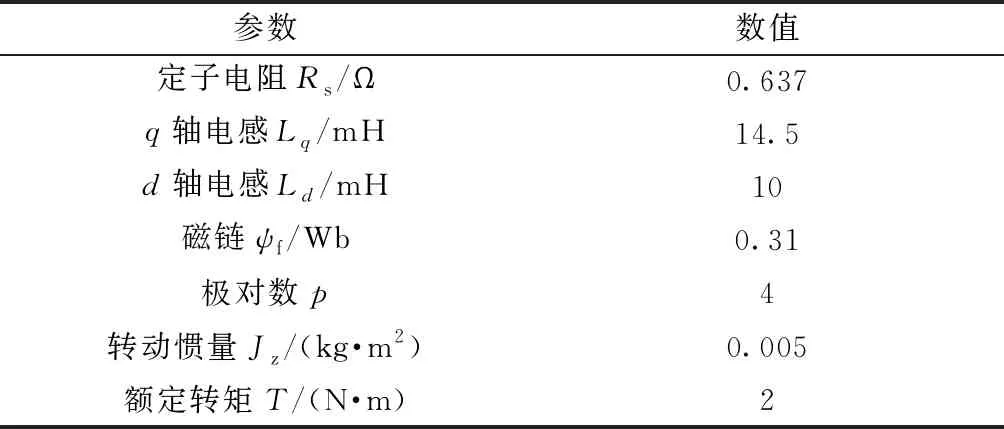
表1 PMSM參數
圖2為低速域改進型高頻注入策略與常規高頻注入策略對比。高頻方波信號設置幅值Vh=50 V,頻率為8 kHz,初始轉速參考值為100 r/min,在0.5 s時,轉速增至200 r/min;在1 s時,負載由空載增至15 N·m。圖2(a)為實際、新型高頻注入與常規高頻注入轉速變化曲線,圖2(b)為轉速誤差變化曲線,圖2(c)為轉子位置與估計轉子位置變化曲線。由仿真結果可知,新型高頻注入法相較于傳統高頻注入法,具有更快的響應速度和系統魯棒性。系統穩定時,轉速誤差小,在突增轉速和負載的情況下,轉速與位置信息都能在較短的時間內收斂至給定值。
圖3為高速域高階滑模策略與常規滑模策略對比。其中,滑模增益l1=l2=40,m1=m2=900,初始轉速參考設置為1 000 r/min,在0.5 s時,轉速增至1 500 r/min,在1 s時,負載由空載增至15 N·m。圖3(a)為實際、新型高頻注入與常規高頻注入轉速變化曲線,圖3(b)為轉速誤差變化曲線,圖3(c)為轉子位置與估計轉子位置變化曲線。在電機平穩運行時,轉速抖振更小,這是由于高階SMO等效控制后得到的是反電動勢實際值與誤差值之間的觀測量,而不是傳統滑模中反電動勢的估計值,取代了通過反電動勢數值計算得到轉子速度的觀測方式,實驗結果與前文分析一致,避免了滑模抖動對轉子位置估計量的直接影響。
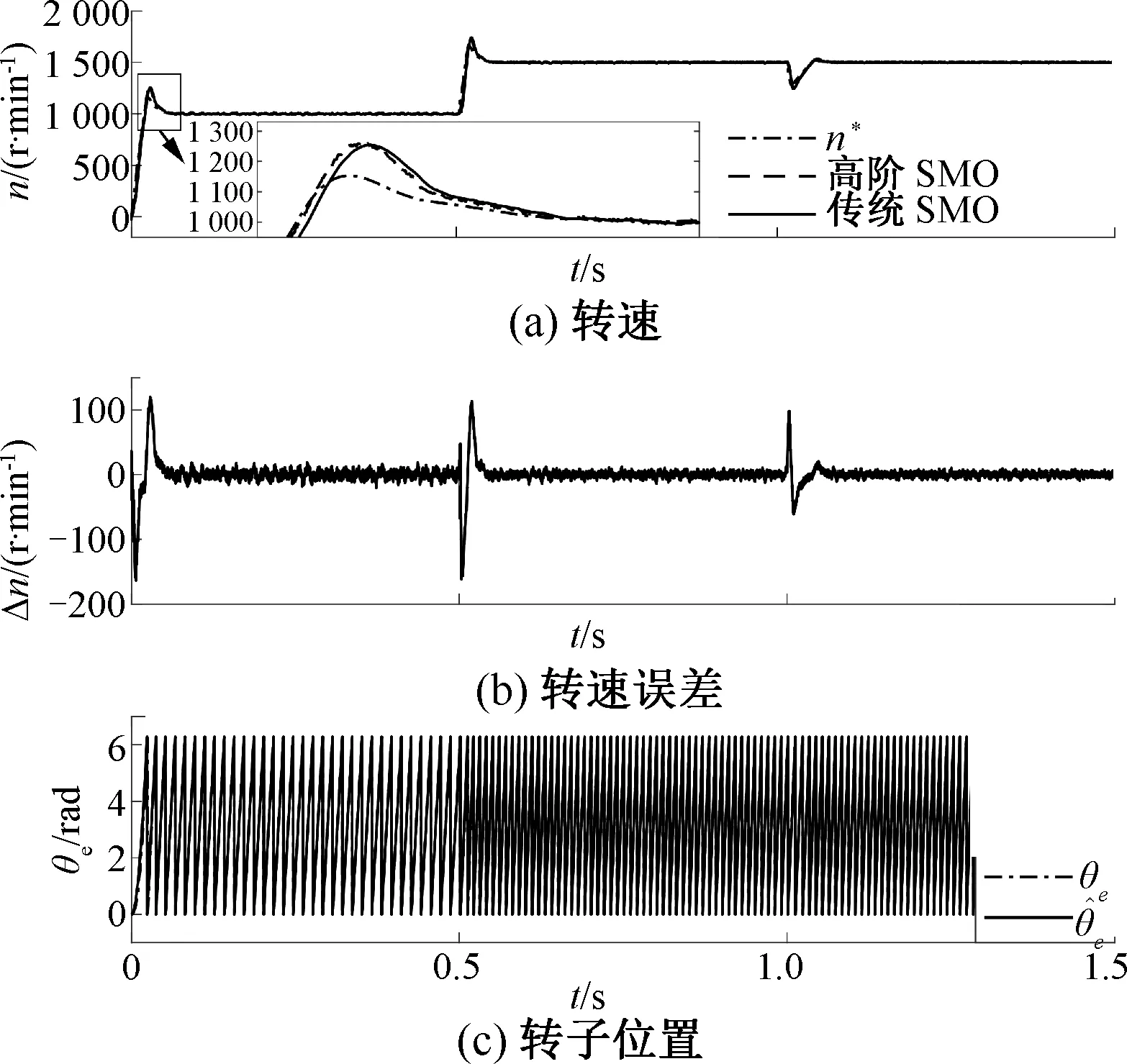
圖3 高速域高階滑模策略對比
圖4為全速域無位置傳感器控制策略。在0.5 s時,轉速由200 r/min增至1 500 r/min,在1 s時,負載由5 N·m突增至15 N·m ,轉速切換區間設置為ωeL=400 r/min至ωeH=600 r/min。低速域高頻注入單獨控制時,穩態誤差在2 r/min內,轉速突增后,轉速通過滯環切換策略在600 r/min轉時切換為高速域高階滑模控制,切換過程平滑穩定,同時轉速靜態誤差控制在1.2 r/min內,1 s突增負載后,轉速依然能快速收斂,體現了算法的可行性
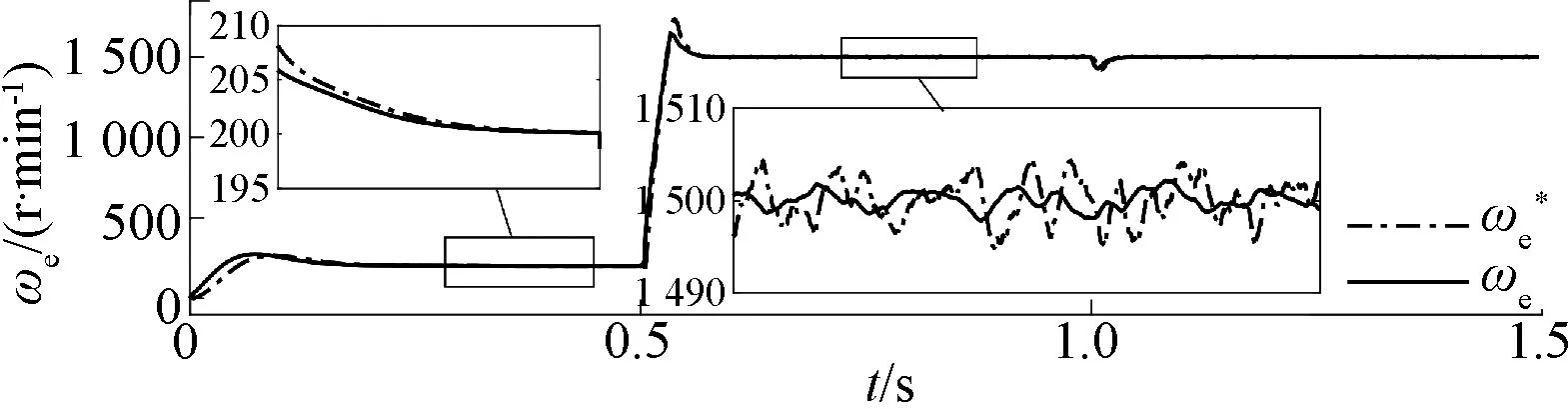
圖4 全速域無位置傳感器控制策略
3 實驗結果
本文采用如圖5所示的實驗平臺對PMSM全速域無傳感器控制策略進行驗證。選取4.8 kW內置式PMSM。其中,采用的主控制器為TMS320F28379D,基于依靠MATLAB設計的GUI控制界面完成應用層的實現,驅動算法控制系統在DSP中實現算法控制,控制頻率為16 kHz。系統結構框圖如圖6所示。
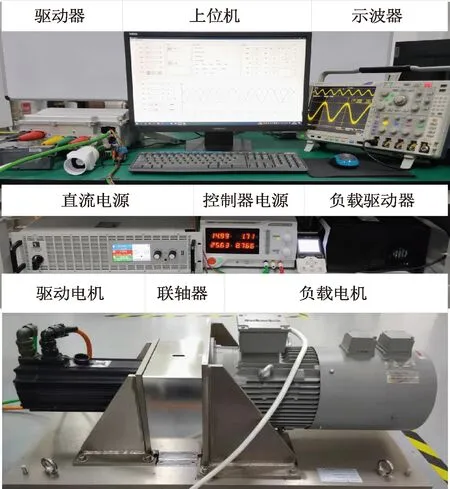
圖5 電機對拖實驗平臺
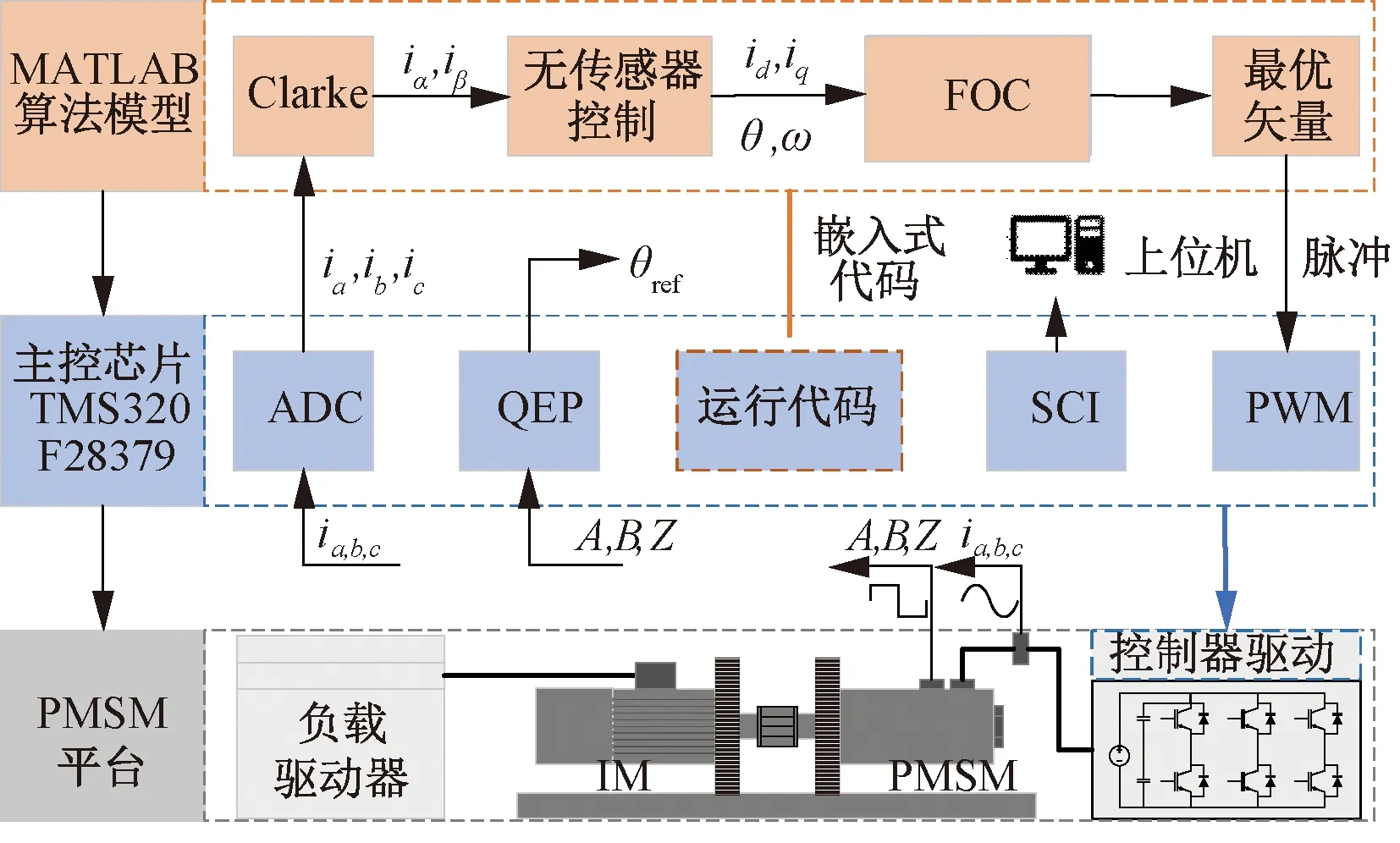
圖6 系統結構框圖
為測試本算法實驗動態及穩態效果,0.6 s時電機由低速域切換至高速域,給定轉速由150 r/min增加至1 750 r/min,切換初期由于給定轉速大幅度變化,低速域高頻注入法出現輕微抖動,通過滯環切換策略,進入高速域時轉速逐漸平穩;0.8 s時突增負載10 N,0.15 s內轉速穩定;1 s時高速域切換至低速域,給定轉速由1 750 r/min降低至150 r/min,高階滑模控制策略在大幅度轉速切換下出現一定抖動與超調,0.8 s后進入低速域電機平穩運行;1.2 s時減載10 N·m,短暫超調后0.08 s內轉速穩定。整個階段轉速跟蹤良好,穩態時角度誤差穩定在0.1°內,驗證了算法的可行性。
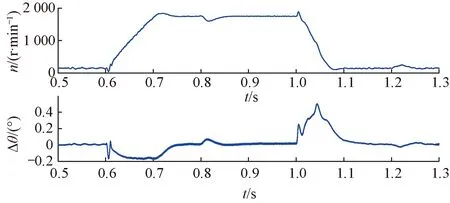
圖7 全速域多工況實驗
4 結 語
在中高速域,本文采用基于擴展滑模觀測器的原理,在不依賴電機本體參數的情況下,在降低滑模抖振的同時,對轉速進行了快速穩定的跟蹤控制。在零低速域,采用基于高頻正交改進型方波注入的轉子位置辨識法。通過重構電流信號,利用相鄰區間內四種高頻響應電流差值,通過數學運算消去高頻正余弦信號中的直流分量。相較于傳統高頻注入法,改進后的高頻注入法減少了濾波器的使用和直流偏置帶來的影響,對系統帶寬和位置估計精度進行改善。在不同速域使用滯環控制策略實現平滑切換。仿真及實驗結果驗證了本文的PMSM全速域無位置傳感器控制策略的可靠性和有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00