模塊化功率變換器驅動開關磁阻電機轉矩控制
2022-08-25 14:07:14楊廣輝郭振超程啟原黃曉燦
微特電機 2022年8期
楊廣輝,郭振超,程啟原,黃曉燦
(1.國家知識產(chǎn)權局 專利局,北京 100088;2.洛陽電光設備研究所瞄準顯示部,洛陽 471000;3.西北工業(yè)大學 自動化學院,西安 710072;4.吉林大學 通信工程學院,長春 130022)
0 引 言
開關磁阻電機(SRM)驅動系統(tǒng)具有結構簡單、工作可靠、機械強度高、高效節(jié)能、調(diào)速精度高、起動電流小、可頻繁正反轉運行等優(yōu)點[1],在航空航天、電動汽車、家用電器、工業(yè)傳動等領域具有廣泛的應用前景[2-5]。不對稱半橋功率變換器是SRM驅動系統(tǒng)中常用的功率變換器拓撲[6],不對稱半橋功率變換器通常由分立的功率開關器件和二極管,或者電源斬波模塊搭建而成,不采用工業(yè)上成熟的電機驅動功率模塊,這無疑增加了系統(tǒng)的復雜度與成本。
文獻[7]提出的模塊化功率變換器由1個半橋IGBT模塊和1個三相全橋IGBT模塊組成,電機相繞組采用星形連接并將中線引出,減少了電機與功率變換器的接線數(shù)量,提高了系統(tǒng)的可靠性。文獻[8]針對文獻[7]無法實現(xiàn)重疊導通的缺陷,提出了新型雙極性勵磁控制策略,該方法改善了模塊化功率轉換器的控制性能,提高了電機輸出轉矩,增加了功率變換器的靈活性和適用性。
在抑制SRM轉矩波動領域,直接瞬時轉矩控制(以下簡稱DITC)具有很好的應用前景。文獻[9]采用的SRM DITC控制方法,提出了在不同工作區(qū)域內(nèi)對轉矩誤差分別進行補償?shù)姆桨福⒏鶕?jù)變化的工作條件動態(tài)調(diào)整換相時刻,通過轉矩誤差調(diào)節(jié)器和檢測相電流結束的時刻,在每個電周期內(nèi)修改開通角和關斷角。文獻[10]提出了一種基于電流重疊角可變的轉矩分配函數(shù)對DITC方法進行優(yōu)化。文獻[11]引入了脈寬調(diào)制(PWM)來調(diào)制轉矩偏差,代替?zhèn)鹘y(tǒng)DITC中的轉矩滯環(huán)控制器,根據(jù)PWM信號和轉子位置所在的扇區(qū)選擇最佳開關信號,根據(jù)轉矩特性曲線,分析了換相期間的轉矩脈動,提出了補償方法。
本文采用文獻[8]中的模塊化功率變換器拓撲結構,在傳統(tǒng)DITC策略的基礎上,提出了一種基于電流重疊角優(yōu)化和脈寬調(diào)制的DITC方法,將傳統(tǒng)轉矩分配函數(shù)中固定的電流重疊角替換為實時計算的值,并在轉矩控制器設計時結合脈寬調(diào)制算法,有效降低了SRM的轉矩脈動。
1 SRM模塊化功率變換器轉矩控制策略
本文采用的模塊化功率變換器拓撲如圖1所示,由1個三相全橋開關模塊和1個半橋開關模塊組成,其相電流是雙極性,每個工作模式下存在2種不同的運行狀態(tài)。

圖1 模塊化功率變化器拓撲結構
模塊化功率變換器驅動的DITC原理框圖如圖2所示,采用雙閉環(huán)控制,根據(jù)位置傳感器得到轉速n后與參考轉矩nref進行比較,得到參考轉矩Tref,利用靜態(tài)轉矩特性得到當前瞬時轉矩T,與參考轉矩Tref比較后經(jīng)DITC轉矩控制器得到開關信號。
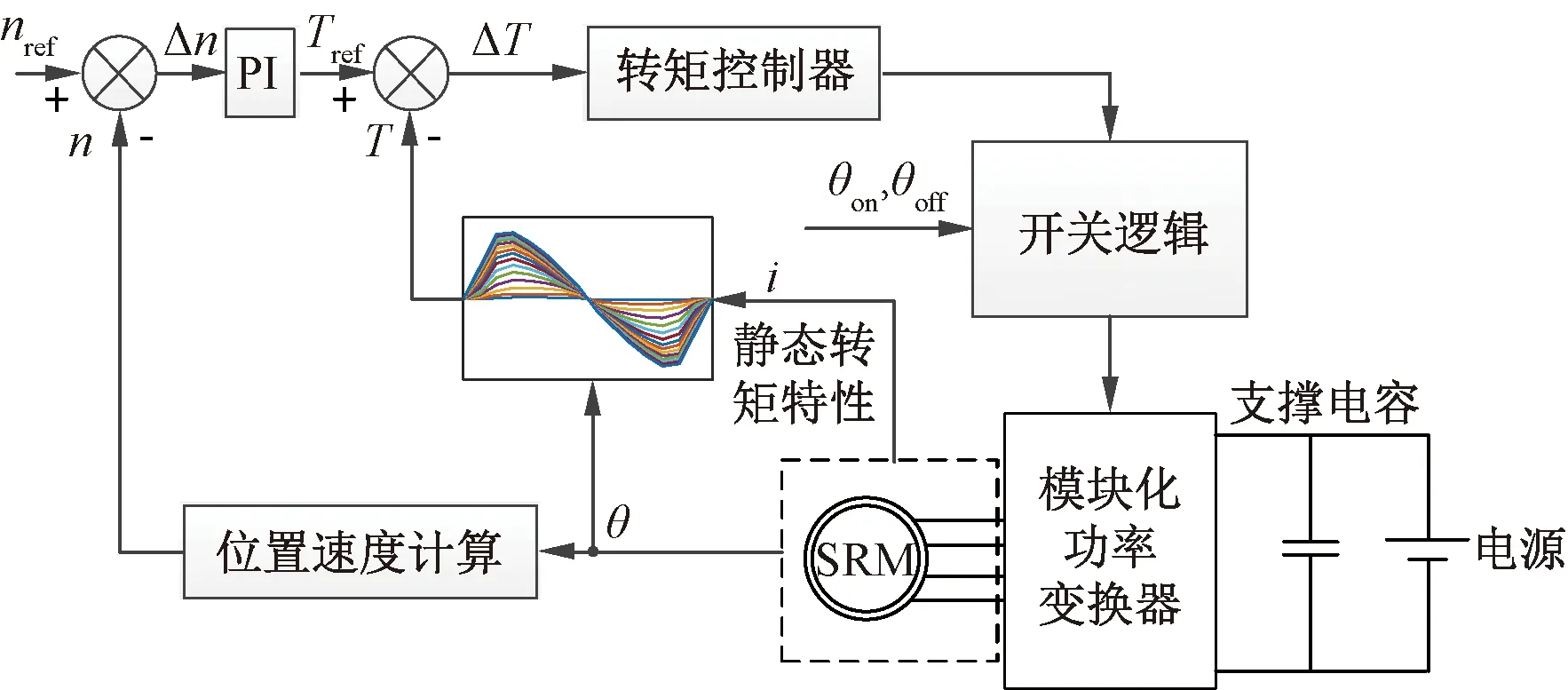
圖2 DITC原理框圖
轉矩控制器的設計是SRM DITC的核心,其中滯環(huán)控制方法是應用較多的偏差控制方法,滯環(huán)控制器結構相對簡單,應用范圍廣。將模塊化功率變換器工作模式分別定義如下:勵磁模式為“1”狀態(tài),續(xù)流模式為“0”狀態(tài)、退磁模式為“-1”狀態(tài)。模塊化功率變換器轉矩滯環(huán)控制原理如圖3所示。
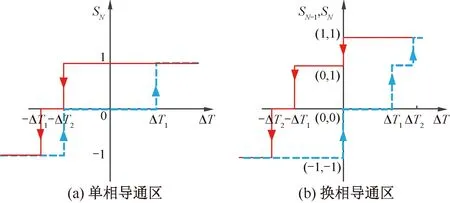
圖3 模塊化功率變換器轉矩滯環(huán)控制原理圖
圖3中,轉矩誤差ΔT定義:
ΔT=Tref-T
(1)
ΔT1和ΔT2分別為轉矩滯環(huán)的內(nèi)環(huán)帶寬與外環(huán)帶寬。
在單相導通區(qū),轉矩滯環(huán)控制原理如圖3(a)所示,以A相為例,如果其初始狀態(tài)為“1”,A相繞組通過開關管T1和T8施加+Udc母線電壓,電機輸出轉矩快速增大,轉矩誤差ΔT快速減小。直至轉矩誤差小于-ΔT1時,改變繞組狀態(tài)為“0”,此時A相繞組處于續(xù)流階段,轉矩誤差繼續(xù)緩慢減小到-ΔT2,此時電機輸出轉矩過大,需要退磁以減小電磁轉矩,滿足系統(tǒng)需求,即改變繞組狀態(tài)為“-1狀態(tài)”,給A相繞組施加-Udc母線電壓,電磁轉矩快速減小。
在換相導通區(qū),轉矩滯環(huán)控制原理如圖3(b)所示,以A、B兩相重疊導通為例,且A相為開通相,要建立轉矩,而B相處于關斷角前期,由于模塊化功率變換器存在電氣耦合,每相并不獨立,此時需要對這兩相的開關狀態(tài)同時進行調(diào)節(jié),其中SN-1、SN分別代表退磁相和勵磁相。
若A、B兩相的初始狀態(tài)分別是(1, 1),電機輸出轉矩快速增大,轉矩誤差ΔT快速減小到0,為保證總轉矩穩(wěn)定,犧牲退磁相,使B相繞組處于續(xù)流狀態(tài),勵磁相A相繞組建立轉矩保持不變,即選擇狀態(tài)(1, 0)。當轉矩誤差ΔT達到內(nèi)環(huán)下限-ΔT1時,此時選擇狀態(tài)(0, 0),A、B兩相均處于續(xù)流狀態(tài),實際輸出轉矩增加緩慢;直到轉矩誤差ΔT達到外環(huán)下限-ΔT2時,表明電機輸出轉矩遠大于參考轉矩,需要關斷開關管T1、T6,繞組處于退磁狀態(tài),電機輸出轉矩減小,以維持轉矩穩(wěn)定。
2 電流重疊角優(yōu)化和脈寬調(diào)制DITC策略
2.1 電流重疊角優(yōu)化的轉矩分配函數(shù)設計
轉矩分配函數(shù)(TSF)控制策略是以合成瞬時轉矩保持恒定為目標,通過轉矩分配函數(shù)分配各相繞組在不同位置時的預期轉矩。常用的轉矩分配函數(shù)有直線型、指數(shù)型、余弦型以及立方型4種。
本文采用余弦型轉矩分配函數(shù)進行轉矩分配,其函數(shù)表達式:
(2)
式中:θon為開通角;θoff是導通相按照轉矩分配函數(shù)設定的規(guī)律開始減小分配的電磁轉矩的起始位置角;θov是相鄰兩相電流重疊導通的角度;τr為電機轉子角周期。
(3)
轉矩分配函數(shù)與開通角、關斷角以及電流重疊角有關,傳統(tǒng)轉矩分配函數(shù)將電流重疊角θov定義為常數(shù),但設定恒定的θov并不能嚴格保證SRM各相分配函數(shù)之和一直為1,從而產(chǎn)生較大的轉矩脈動。
SRM電流重疊角在不同工況下的變化如圖4所示。圖4中,iB_TSF、iA_TSF分別為轉矩分配函數(shù)中電流重疊角θov_TSF不變時,對應的B、A相繞組電流;iB為實際工況下B相繞組電流,θov為實際工況下電機電流重疊角。

圖4 電流重疊角變化示意圖
當電機低速或者帶較小負載電動運行時,相電流較小,如圖4(a)所示,當SRM從B相換相到A相運行時,實際的電流重疊角θov<θov_TSF,按照傳統(tǒng)的余弦型分配函數(shù),在S1區(qū)域內(nèi)應滿足式(4),但此時B相無法產(chǎn)生轉矩,實際轉矩分配如式(5),因此電機實際產(chǎn)生的電磁轉矩小于轉矩分配函數(shù)分配的電磁轉矩。
(4)
(5)
當電機高速或者帶大負載運行時,相電流較大,如圖4(b)所示,當SRM從B相換相到A相,實際的電流重疊角θov>θov_TSF,若按照傳統(tǒng)的余弦型分配函數(shù),在S2區(qū)域內(nèi)應滿足式(6),但是B相仍可以產(chǎn)生轉矩,實際轉矩分配如式(7),因此電機實際產(chǎn)生的電磁轉矩將會大于轉矩分配函數(shù)分配的電磁轉矩。
(6)
(7)
針對上述問題,本文采用電流重疊角可變的轉矩分配函數(shù)來對傳統(tǒng)的DITC策略進行改進。以A、C相重疊導通為例,電流重疊角θov=θA0-θonC。其中θonC為C相開通角,θA0需要實時在線檢測,在θA0處,理論上A相電流滿足下式:
(8)
通過檢測相電流大小和變化率可以計算得到實際電流重疊角θov的值,將實時計算所得的θov代替?zhèn)鹘y(tǒng)余弦型轉矩分配函數(shù)中固定的θov_TSF。
2.2 結合PWM的轉矩滯環(huán)控制器設計
在SRM DITC算法中,轉矩控制器采用傳統(tǒng)滯環(huán)控制方法,結構簡單,但滯環(huán)限設置的大小會影響到滯環(huán)控制方法的效果。當滯環(huán)限范圍設置得比較小時,雖然可以提高系統(tǒng)的響應速度,但是無疑增加了功率開關器件的負擔,在開關頻率比較高的情況下可能會導致功率器件開關無法響應,會引起系統(tǒng)失控的嚴重后果;當滯環(huán)限設置得比較大時,系統(tǒng)的控制作用就會減弱,不能達到抑制轉矩脈動的目的,并且在滯環(huán)限內(nèi)系統(tǒng)功率開關器件不動作,于是系統(tǒng)進入到了一種“自由響應”階段。
為了克服傳統(tǒng)滯環(huán)控制方法滯環(huán)限內(nèi)不動作、滯環(huán)限外強制動作的缺點,本文在模塊化功率變換器的基礎上,結合PWM算法進行轉矩滯環(huán)控制器設計,在滯環(huán)限內(nèi)采用PWM算法,在固定采樣周期下連續(xù)調(diào)整轉矩誤差,在滯環(huán)限外部采用傳統(tǒng)滯環(huán)控制方法。PWM調(diào)制方法定義如表1所示。

表1 調(diào)制方法定義
在一個采樣周期Ts內(nèi),定義轉矩誤差采樣值為ΔTsample,δ為誤差閾值的絕對值,本文將滯環(huán)限之間的轉矩誤差歸一化到±1之間,誤差閾值δ滿足:
(9)
式中:γ為期望轉矩脈動系數(shù)。
模塊化功率變換器單相導通區(qū)轉矩誤差控制原理如圖5所示。控制策略如下:

圖5 模塊化功率變換器單相導通轉矩誤差控制原理圖
(10)
轉矩誤差控制原理如下:
1)當ΔTsample>δ時,電機參考轉矩遠大于實際轉矩,此時電機繞組應處于“1”狀態(tài),進入快速勵磁階段,滿足系統(tǒng)需求。
2)當0≤ΔTsample≤δ時,電機參考轉矩稍大于實際轉矩,此時采用PUPWM,電機繞組處于“1”和“0”狀態(tài),從而柔和地增加電機的輸出轉矩。
3)當-δ≤ΔTsample<0時,電機參考轉矩稍小于實際轉矩,此時采用NUPWM,電機繞組處于“-1”和“0”狀態(tài),從而柔和地減小電機的輸出轉矩。
4)當ΔTsample<-δ時,電機參考轉矩遠小于實際轉矩,此時電機繞組應處于“-1”狀態(tài),進入快速退磁階段,盡快減小電機輸出轉矩。
換相導通區(qū)轉矩誤差控制原理如圖6所示。控制策略如下:

圖6 模塊化功率變換器換相導通轉矩誤差控制原理圖
(11)
以B、A兩相重疊導通為例,且A相為即將導通相,B相為即將關斷相,轉矩誤差控制原理如下:
1)當ΔTsample>δ時,電機參考轉矩遠大于實際轉矩,電機繞組應處于(1,1)狀態(tài),進入快速勵磁階段,滿足系統(tǒng)需求。
2)當-δ≤ΔTsample≤δ時,電機參考轉矩與實際轉矩稍有偏差,此時A相采用BPWM調(diào)制方式,B相采用NUPWM,B、A兩相電機繞組在此區(qū)間內(nèi)狀態(tài)可處于(1,1),(0,1),(0,0),(-1,-1)4種狀態(tài),算法可根據(jù)轉矩誤差實際值進行快速有效調(diào)節(jié)。
3)當ΔTsample<-δ時,電機參考轉矩遠小于實際轉矩,此時電機繞組應處于(-1,-1)狀態(tài),進入快速退磁階段,盡快減小電機的輸出轉矩。
3 仿真驗證
本文以一臺三相12/8極SRM為樣機,經(jīng)過實驗獲取了其靜態(tài)磁鏈特性,進而采用文獻[12]神經(jīng)網(wǎng)絡非線性映射建模的方法,對曲線簇進行學習,得到完整的SRM靜態(tài)特性曲線。而后根據(jù)電壓平衡方程和機械方程,進行電機本體仿真模型的搭建,主要包括三相SRM模塊、模塊化功率變換器模塊和控制器模塊,如圖7所示。

圖7 模塊化功率變換器驅動的SRM系統(tǒng)仿真模型
設定參考轉速為500 r/min,采用傳統(tǒng)DITC控制方式仿真結果如圖8所示。圖8中轉矩脈動系數(shù)為54.39%,效率為62.85%。

圖8 500 r/min時DITC仿真結果
采用改進型DITC控制方式仿真結果如圖9所示。圖9中轉矩脈動系數(shù)下降到了31.13%,效率為63.07%。

圖9 500 r/min時改進型DITC仿真結果
給定參考轉速為1 000 r/min,采用傳統(tǒng)DITC控制方式仿真結果如圖10所示。圖10中,轉矩脈動系數(shù)為65.01%,系統(tǒng)效率為78.85%。
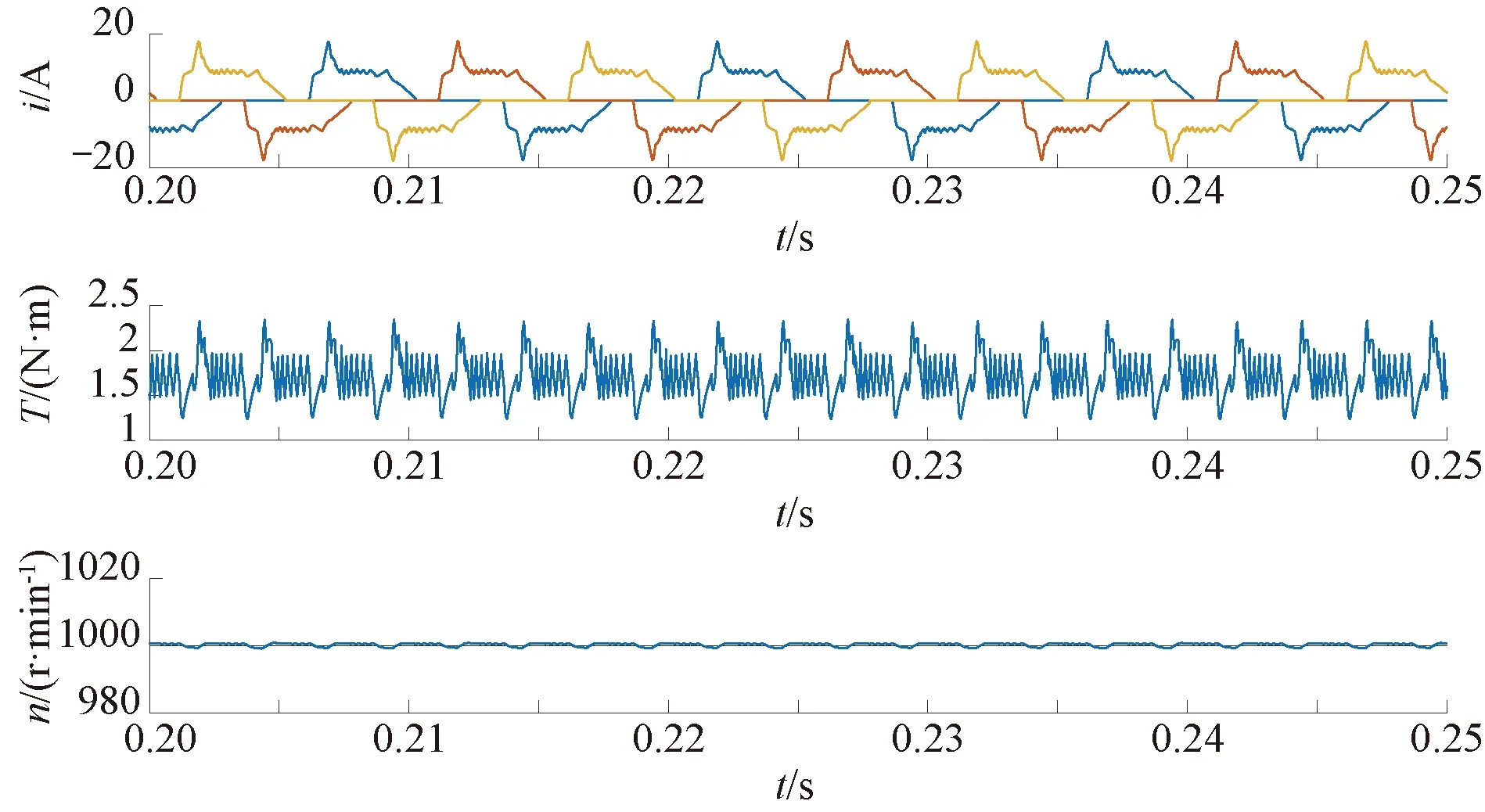
圖10 1 000 r/min時DITC仿真結果
采用改進型DITC控制方式仿真結果如圖11所示。圖11中,轉矩脈動系數(shù)下降到了34.65%,系統(tǒng)效率為78.96%。

圖11 1 000 r/min時改進型DITC仿真結果
將模塊化功率變換器驅動的SRM轉矩脈動的上述仿真結果進行總結,如表2所示。

表2 SRM模塊化功率變換器DITC仿真結果總結
分析表2數(shù)據(jù)可以得到如下結論:
1)電機運行在相同轉速條件下,改進型DITC控制算法轉矩脈動小于傳統(tǒng)DITC控制方法,在低轉速500 r/min時,改進型DITC控制方式下的,SRM轉矩脈動系數(shù)可以降低到31.13%。
2)電機運行轉速相同時,采用兩種不同的控制算法,電機輸出的平均轉矩相當;對傳統(tǒng)DITC方法改進后,不僅沒有犧牲電機的輸出轉矩和效率,而且對轉矩脈動起到較好的抑制作用,從仿真的角度證明了改進算法的有效性。
4 實驗驗證
目前,dSPACE在電機控制領域發(fā)揮著越來越重要的作用[13]。本文搭建的SRM驅動系統(tǒng)測試平臺實物圖如圖12所示。實驗中電機所加負載為1.5 N·m,分別給定不同的參考轉速進行實驗,實時系統(tǒng)中斷頻率為10 kHz。
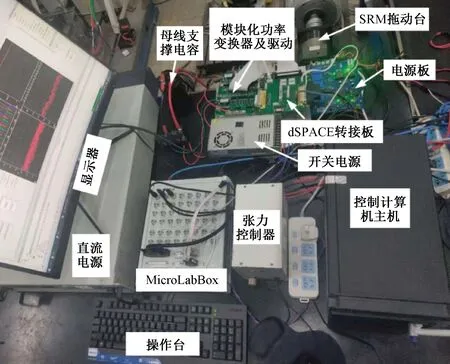
圖12 基于dSPACE的SRM實驗平臺實物照片
設定參考轉速為500 r/min,采用傳統(tǒng)DITC控制方式,實驗結果如圖13所示,轉矩脈動系數(shù)為63.60%,系統(tǒng)效率為46.02%。

圖13 500 r/min時DITC實驗結果
采用改進型DITC控制方式,實驗結果如圖14所示。圖14中轉矩脈動系數(shù)下降到了38.09%,系統(tǒng)效率為46.38%。

圖14 500 r/min時改進型DITC實驗結果
給定參考轉速為1 000 r/min,采用傳統(tǒng)DITC控制方式,實驗結果如圖15所示,轉矩脈動系數(shù)為70.68%,系統(tǒng)效率為58.72%。

圖15 1 000 r/min時DITC實驗結果
采用改進型DITC控制方式,實驗結果如圖16所示。圖16中,轉矩脈動系數(shù)下降到了42.30%,系統(tǒng)效率為59.02%。

圖16 1 000 r/min時改進型DITC實驗結果
將模塊化功率變換器驅動的SRM轉矩脈動的上述實驗結果進行總結,如表3所示。
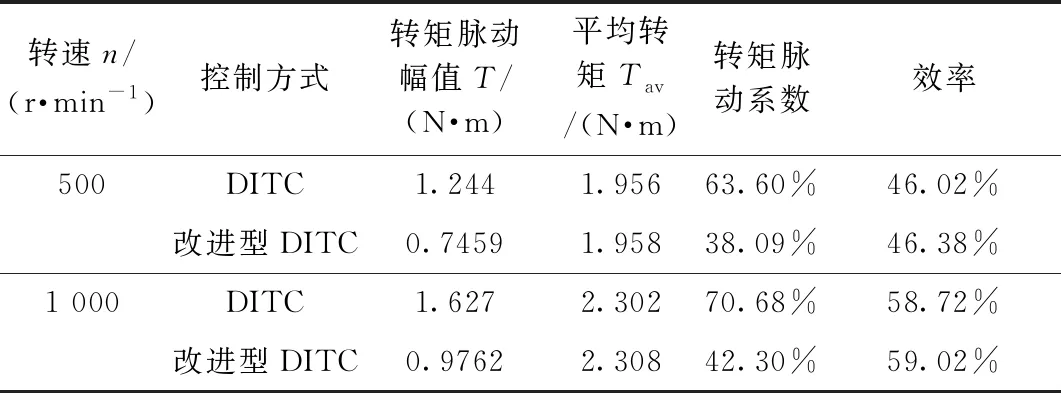
表3 SRM模塊化功率變換器DITC實驗結果總結
分析表3數(shù)據(jù),可得以下結論:
1)給定相同的參考轉速,本文的改進型DITC控制方法對SRM轉矩脈動抑制效果要比傳統(tǒng)DITC控制方法好。
2)相同轉速條件下,從電機輸出的平均轉矩以及驅動系統(tǒng)效率看,改進的DTIC控制方法與傳統(tǒng)DITC控制方法基本一致。
3)采用同種控制方法,隨著轉速的升高,SRM轉矩脈動會變大,驅動系統(tǒng)效率會有所提升。
實驗結果與仿真結果相比,轉矩脈動增大,效率降低。二者之間存在差異,主要原因是仿真條件比較理想,步長設置為5×10-6s,而實驗受dSPACE實時系統(tǒng)以及功率變換器的開關頻率限制,控制系統(tǒng)步長為1×10-4s。
5 結 語
本文針對模塊化功率變換器驅動的SRM,提出了一種基于電流重疊角優(yōu)化和脈寬調(diào)制的DITC策略,實現(xiàn)了電流重疊角的實時計算與更新,保留了滯環(huán)控制方法快速簡單的特性,并避免了其滯環(huán)帶內(nèi)不動作的缺點。仿真及實驗結果表明,本文的改進型DITC控制方法能夠有效地抑制電機的轉矩波動,且不犧牲平均輸出轉矩和效率。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數(shù)學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟技術協(xié)作信息(2018年30期)2018-11-22 06:20:24
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52