基于脈沖均衡輸出的步進電動機多軸向聯動控制
2022-08-25 14:07:18於立峰胡凱波顧范華夏志凌
微特電機 2022年8期
於立峰,胡凱波,顧范華,夏志凌
(1.浙江浙能蘭溪發電有限責任公司,金華 321100; 2.浙江浙能電力股份有限公司,杭州 311200)
0 引 言
隨著計算機技術與微電子技術的發展,步進電動機作為機電一體化的執行元件,具有轉子慣量低、精準度高、控制操作簡便以及誤差小等優點,被廣泛應用于各個行業的自動化控制系統中的定位與定速[1]。近年來,計算機數控機床的發展以及各種機器人的研發,對步進電動機定位精度以及響應速度的要求有所提升,單軸向的步進電動機已經無法滿足各種高精度的要求。多軸向集中控制步進電動機逐漸成為研究的熱點。但是,多軸向集中控制方法中最大的弊端是無法實現聯動,這主要是因為脈沖不均勻而導致的誤差較大。文獻[2]提出基于模型變換的步進電動機控制方法,雖然提高了步進電動機的控制精度,但是受外界干擾影響較大,步進電動機脈沖存在較大波動,控制誤差較高;文獻[3]提出基于外差激光干涉的步進電動機控制方法,采用外差激光干涉步進電動機的脈沖信號,雖然具備一定的脈沖控制性能,但是多軸聯動控制效果差,無法實現理想的控制效果;文獻[4]分析的磁通反作用電機控制方法可降低步進電動機的能耗,具有節能環保的效果,但是靈敏性較差,控制時間較長。
基于以上缺陷,本文研究了一種智能化步進電動機多軸向集中控制方法,集中控制多軸向的步進電動機,使其可達到加減速、細分以及電流負反饋的功能,精準度更高,更適應于各種高要求的機電一體化設備中。
1 控制方法的設計
1.1 步進電動機多軸向集中控制過程分析
圖1為智能化步進電動機多軸向集中控制總體結構圖。該控制結構包括8254定時計數芯片、DSP控制系統、邏輯綜合電路、DA轉換、功率驅動電路與過流檢測6個部分。該結構選取TI公司的TMS32LF2812芯片作為DSP控制系統的核心,多軸向步進電動機的相序信號、PWM脈沖、細分值數字信息、DA轉換的片選信號均由DSP控制系統進行發送,DSP控制系統還負責與外部進行通信與信號的細分,并通過外界的通信指示發送控制信號至多個軸向步進電動機。

圖1 智能化步進電動機多軸向集中控制流程圖
邏輯綜合電路利用可編程邏輯器件通過合成相序信號與PWM波信號獲取新具有斬波的相序信號。DA轉換部分利用雙通道的8位DA芯片將DSP發送的步進電動機兩相細分值數字信號轉換成細分功能所需的細分值模擬量,利用DSP發送的片選信號與寫信號選擇轉換成幾相細分值[5]。過流檢測部分的主要功能為電流保護,將獲取的采樣電阻中電壓值與基準電壓相比,采樣電阻中電壓值高于基準電壓時則系統自動停止工作,保證相電流不超過基準電壓,保護電機與控制系統[6]。選取兩個H橋的高集成度步進電動機控制專用驅動芯片作為系統的功率驅動部分主要組成,并在功率驅動部分合成DA轉換部分所發送的細分值模擬量,獲取脈沖[7]。但是由于脈沖無法均衡輸出,故無法實現多軸向聯動控制。
1.2 脈沖均衡設計
通常情況下智能化步進電動機的最高起動速度低于最高運行速度,因此無法按照最高運行速度起動電機。異步電機具有旋轉系統的慣性,因此無法在快速運行至接近終點時立即停止與鎖定[8]。在步進電動機的速度控制過程中,需要按照加速—高恒速—減速—停止的過程進行控制。
可用于步進電動機的速度控制形式通常有指數曲線加減速直線規律與勻加減速直線規律兩種。指數曲線作為最理想的加速曲線,雖然可以實現最精準的加速控制,但其實現過程較為復雜,應用較少;而直線加減速曲線具有加速控制較為穩定,編程簡單等優點,廣泛應用于速度變化較大的快速定位中,因此選取勻加減速直線規律進行智能化步進電動機多軸向的集中控制[9]。
通過對DSP控制系統的軟件編程計算,改變脈沖進行步進電動機的速度控制,利用8254定時計數芯片設定時間基準,用f表示DSP的時鐘頻率,依據連續增減計數模式獲取脈沖占空比為50%的PWM脈沖,表示為T1CMPR=T2PR/2。設n為步進電動機運行過程中的速度,N為步進電動機運行的總步數,設置加速步數初始化a=0。速度控制具體實現過程如下:
“起動”:設置n=n低,寄存器周期T=f/2×n,賦值比較寄存器T1CMPR=T2PR/2,智能化步進電動機運動一次時,N--,a++。
“加速”:將剩余步數進行比較[10],可能會存在兩種情況:
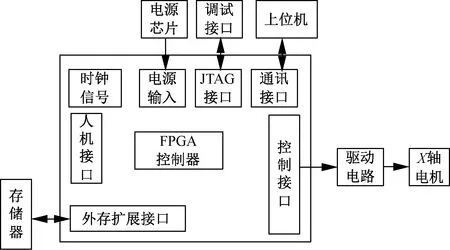
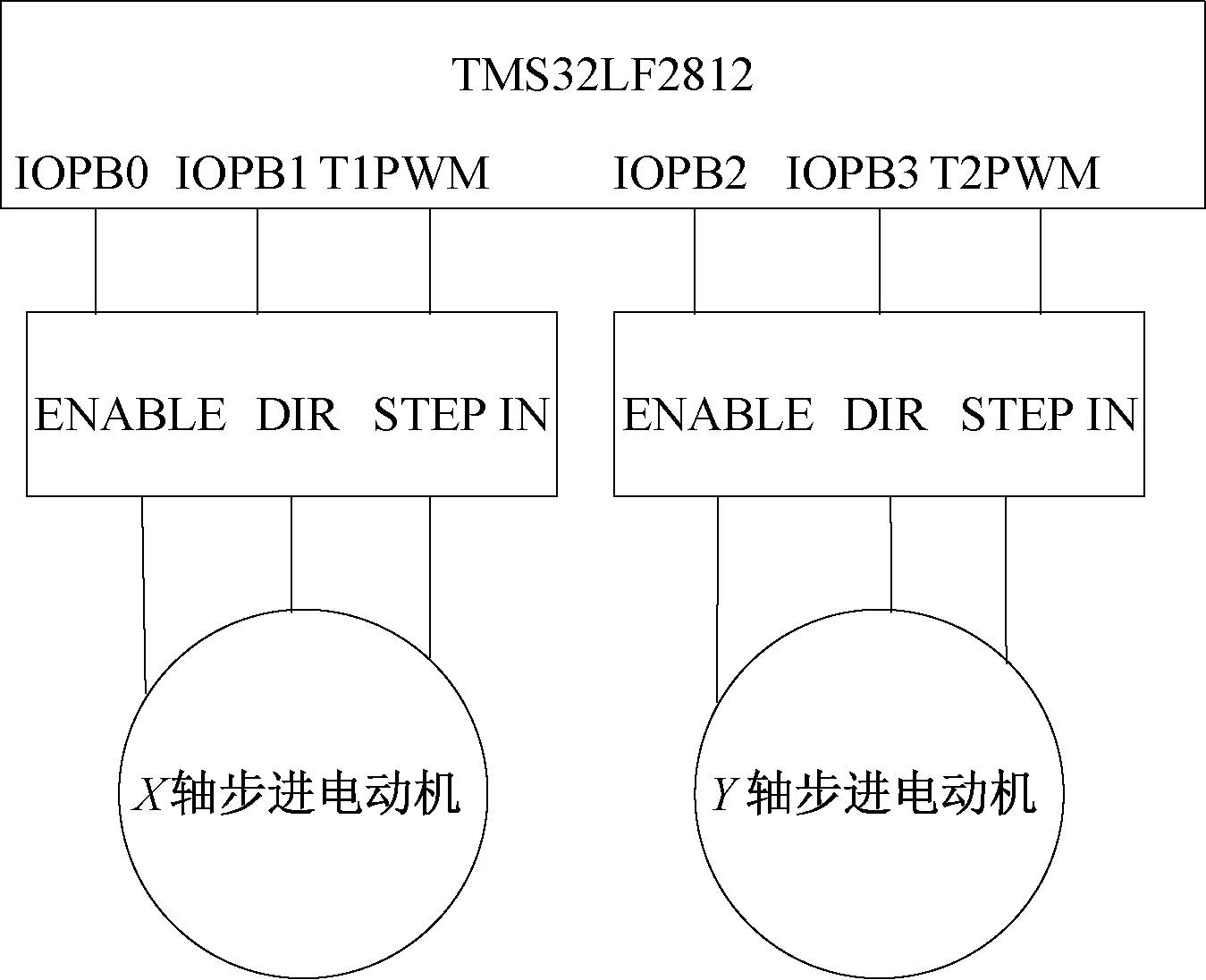
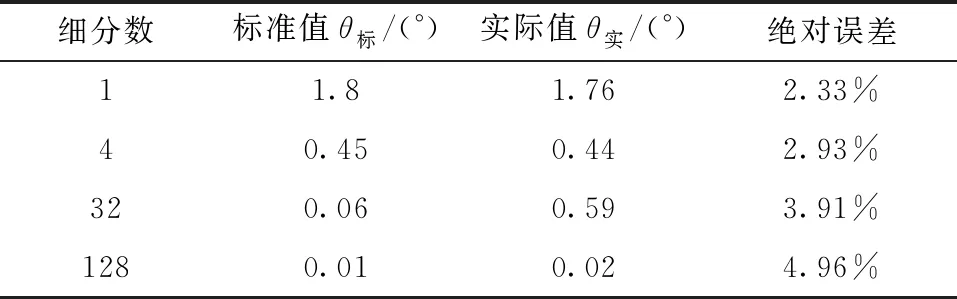
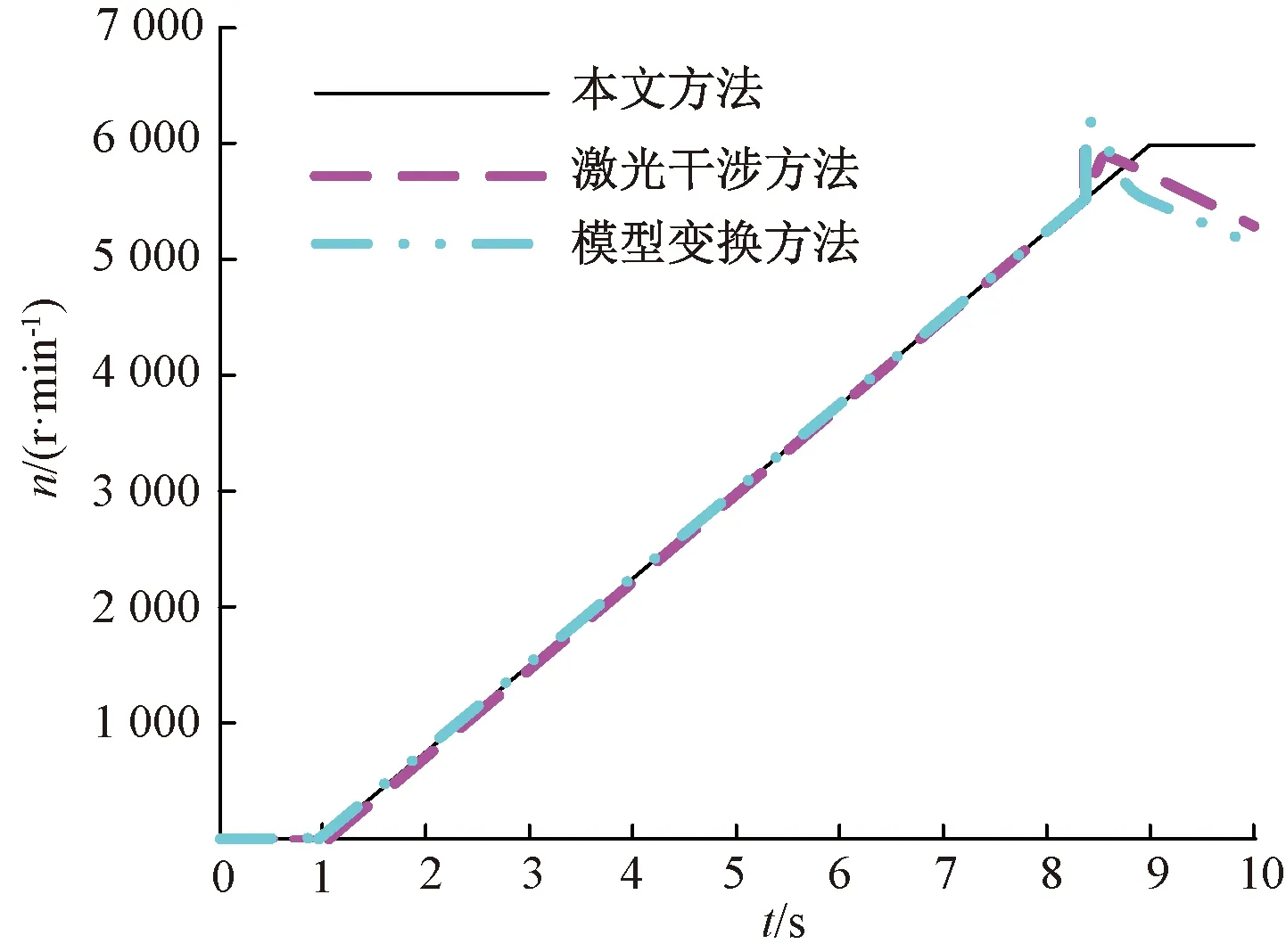
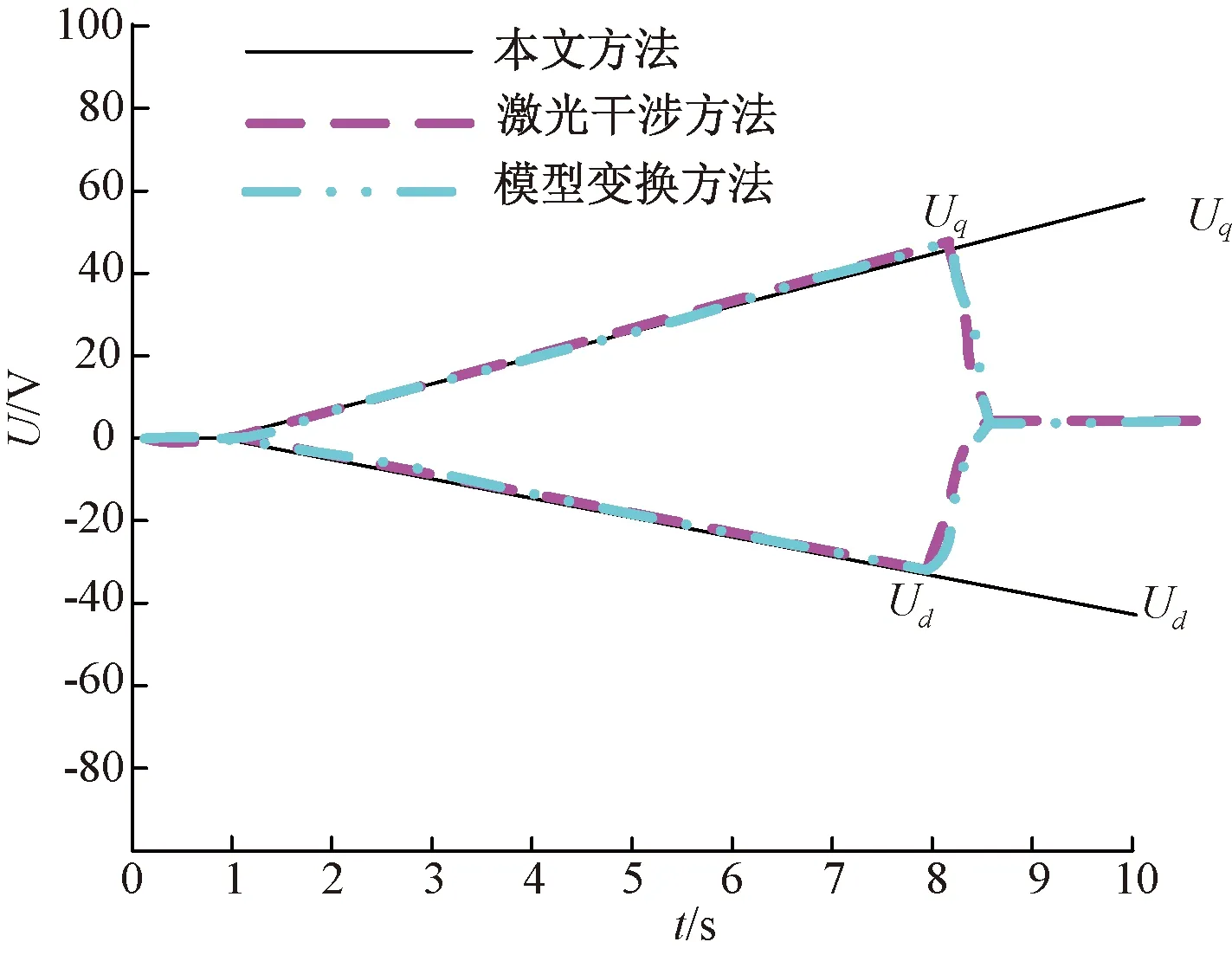
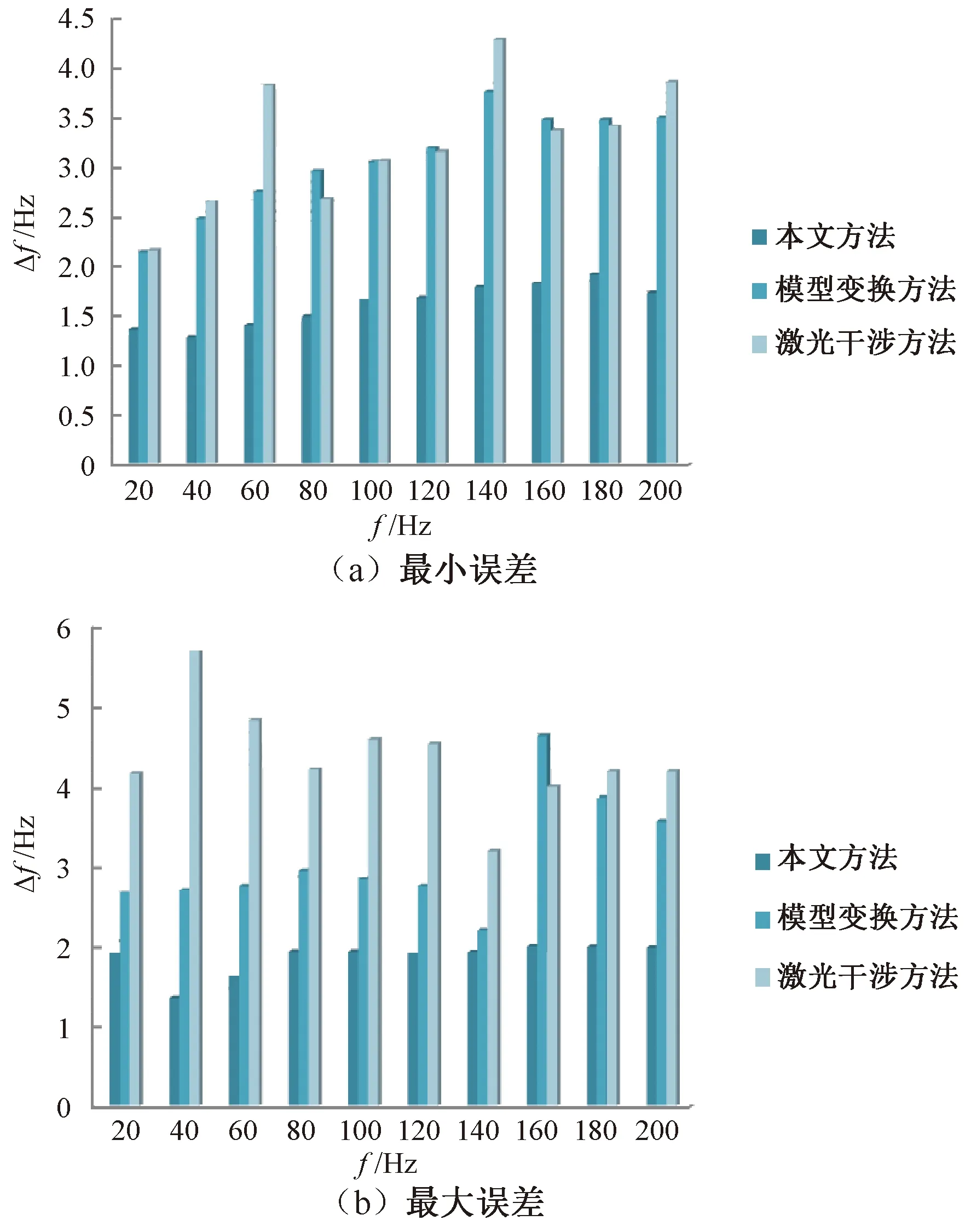
(1)N (2)N>a,發生此種情況時,需要繼續進行比較n是否大于n高,若n>n高,表明該軸已完成加速運動,需要進行至“高速”步驟;若n “高速”:設置n=n高,將剩余步數進行比較,若N=a,則步進電動機即將減速,進行至“減速”步驟;否則說明PWM載波頻率未有任何變化,則T=f/2×n,比較寄存器T1CMPR=T2PR/2,N--。設置完成后,進行“高速”步驟[11]。 “減速”:當N=0時,說明步進電動機的軸已經完成運動軌跡,此時設置停止運動命令。否則設置下一個脈沖n=n-a/n,設置周期寄存器T=f/2×n,比較寄存器T1CMPR=T2PR/2,N--,執行完成后,繼續進行至“減速”步驟[12]。 以上過程中,加速段前后脈沖速度變化Δv如下: Δv=n后-n前 (1) 式中:n前表示加速段前的脈沖速度;n后表示加速段后的脈沖速度。 加速段前后脈沖時間間隔Δt公式如下: (2) 式中:T前表示加速段前的寄存器周期;T后表示加速段后的寄存器周期;f表示標準式中頻率;n表示當前步進電動機速度;a表示初始步進電動機速度。 1.3.1 控制方案設計 主要控制功能模塊為 FPGA,模塊主要包括時鐘分頻、速度精致和方向控制,這3個部分功能主要是對電機實現控制;利用鎖相環 PLL 宏模塊,產生 PWM 信號完成速度控制;采用脈沖分配器分成不同步進時序,實現換相控制。具體步驟如圖 2 所示。 圖2 方案示意圖 將兩相混合式電機作為研究對象,利用恒流斬波驅動,選用型號42BYG250的電機,以實現正反轉功能。該電機具體參數如下:額定電流為0.67 A,額定電壓為12 V,步距角1.8°,定位轉矩11.8 mN·m,最大空載起動頻率在1 000 Hz以上,其運行頻率在3 000 Hz以上。 圖3 方案硬件結構圖 1.3.2 基于均衡脈沖的步進電動機多軸向聯動控制模型 多軸向聯動的控制接口圖如圖4所示。通信號(ENABLE)與方向信號(DIR)利用I/O接口IOPBx發送至步進電動機,X軸、Y軸的步進電動機通過GP1的PWM脈沖和GP2的PWM脈沖進行控制。并將DSP與8254定時計數芯片相結合,設置步進電動機神經網絡拓撲結構,構建基于均衡脈沖的步進電動機多軸向聯動控制模型,從而實現智能化步進電動機的多軸向聯動控制。 圖4 多軸聯動的DSP與步進電動機控制接口框圖 步進電動機多軸向控制系統中的DSP需要控制電機,同時要響應外部中斷進而調整系統狀態以及控制串口發送系統狀態數據至人機交互界面,若選取實時計算控制方法,會影響聯動控制速度,系統中CPU資源的減少也會影響其他功能的正常運行,因此選取離線計算數據表實時補償控制方法進行多軸向步進電動機的聯動。該方法需要設定其中1個步進電動機中的軸作為時間標準軸,其表達式為: (3) 式中:θ1為步進電動機的轉角;d為運動軌跡方程。按照設定的運動軌跡,將運動軌跡以時間標準軸的運動速度為基準分為若干份時間相同的運動軌跡,將獲取的小份運動軌跡設置為與運動軸相對應的勻速直線運動[13],利用各項直線運動的調整擬合標準的空間曲線運動,其表達式: (4) 式中:E為運動軌跡的總耗能;I表示聯動效果;U表示小份運動軌跡份數。以上過程中,時間相同的小份運動軌跡份數越多,聯動效果越好[14]。 在實際聯動中,步進電動機神經網絡拓撲結構發生變化,由此對神經網絡拓撲結構進行聯動控制,其優點是網絡連通性好、耗能低等。步進電動機神經網絡拓撲結構中的全部節點消耗功率之和最低,如果任意節點的半徑超過某一閾值,則這個節點能量將會很快消耗,所以超過閾值的半徑節點越少越有效。 超過閾值半徑Rv的節點數q表達式: CT掃描需要較長的時間,這個過程中,掃描對象如果發生形狀、位置的變化,會降低CT成像質量。運動偽影主要分為剛體運動偽影和非剛體運動偽影。 (5) 式中:m為步進電動機神經網絡拓撲結構節點數量;i為m個節點中的任意節點,1≤i≤m;Rmax表示步進電動機神經網絡節點的最大半徑;E為總耗能。 在相同時間內所有軸步進電動機發射的脈沖數δ與電機神經網絡拓撲結構,通過軸間的幾何運動關系獲取,并發送至數據表內,將所有時間的數據累積即可獲取所需的數據表[15]。步進電動機軸運動過程中,利用數據表中數據相應的運動時間t,根據均衡脈沖Δδ即可構建相應步進電動機的多軸向聯動控制模型,其表達式: minλ= (6) 全部步進電動機在同一時刻起動運動即實現智能化步進電動機的準確多軸向聯動。為保證集中控制的準確性,在軸運動過程中可利用DSP實時對智能化步進電動機進行微調,確保各軸向的運動軌跡符合運動要求。 1.3.3 步進電動機多軸向聯動流程設計 實施步進電動機的多軸向聯動時,依據要求的運動軌跡計算數據表并發送至數據RAM內,在定時計數芯片8254中設定每個步進電動機軸的工作方式。步進電動機起動運動時,將每個步進電動機軸的運動數據發送至該軸的計數芯片8254中,發送數據的同時啟動門控信號,電機起動運行。時間標準軸發送第一個脈沖數完成時,同步發送高電平信號至DSP的通用IO口,DSP接收信號后發送全部軸運動的第二份數據至相應定時計數芯片8254開門控信號,步進電動機中各軸接收到信號后發送第二份脈沖數至相應的計數芯片8524中,直至所有運動數據發送完成,運動過程結束。 智能化步進電動機多軸向聯動程序流程圖如圖5所示。DSP在每次完成脈沖發送的同時,需要領取與各軸相對應的8254計數寄存器中的運動數據,若數據領取不夠完全,剩余數據則加入下一份數據中以保證步進電動機各軸準確完成運動軌跡。步進電動機脈沖發送速度等于電機軸應發送的脈沖數量與數據運動時間之比,因此若數據運動時間相等,脈沖應基本發送完全,誤差較小。在實際電機運動過程中,若出現各軸脈沖發送差別過大的情況,可通過人為中斷程序,對軸的運動數據進行調整,保證電機各軸的運動軌跡符合設置要求。利用程序中斷調整軸運動數據的時間越短越好,長時間的程序中斷會導致系統出現較大的誤差。 圖5 聯動程序流程圖 實驗對象選取某電網中的步進電動機,型號為57BYG250A,當母線電壓是240 V時,智能化步進電動機的最大轉速可高達6 000 r/min,設置實驗開關頻率為5 kHz,給定多軸向電流指令為10 A,步距角為1.8°,步進電動機恒加速運行。圖6為智能化步進電動機測試臺。 圖6 智能步進電動機測試臺 根據智能化步進電動機測試臺和測試參數,通過計算得到每個脈沖所轉過的角度,對智能化步進電動機實測數據進行對比分析。表1為1.8°步距角細分標準值和誤差表。 表1 1.8°步距角細分標準值和誤差表 由表1可知,在1~128細分的各檔位中,每個脈沖所轉過角度的絕對誤差在5%以內,智能化步進電動機的控制精度較高。通過MATLAB軟件仿照實驗模塊搭建一個仿真平臺,為了進一步驗證本文方法的性能,將本文方法與激光干涉方法和模型變換方法進行比較,實驗測試3種方法進行多軸向集中控制下的步進電動機運行結果,如圖7~圖9所示。 圖7 運行電機轉速情況對比 圖8 運行電機電流情況對比 圖9 運行電機電壓情況對比 從圖7可以看出,采用本文方法控制的步進電動機運行平穩,在運行9 s時達到最高轉速并穩定運行;而采用激光干涉方法和模型變換方法的步進電動機在8 s左右產生旋轉偏移,轉速降低,導致電機運行異常。由此說明,本文方法可準確控制步進電動機的平穩運行。 從圖8可以看出,本文方法控制的步進電動機電流運行過程中維持穩定,并且電流值穩定在給定電流10 A,步進電動機運行電流誤差較小;而激光干涉方法和模型變換方法控制的步進電動機運行在8 s時電流出現振蕩,步進電動機啟動過流保護,停止運行。由此說明,本文方法控制步進電動機電流效果較好,再次驗證了本文方法的控制性能。 從圖9可以看出,本文方法控制的步進電動機電壓隨著轉速的升高而有所提升,這與實際情況相符;而激光干涉方法和模型變換方法控制的步進電動機電壓隨著過流保護的停止而返回零值。以上實驗結果說明了本文方法具有較好的控制性能。 智能化步進電動機具有矩頻特性,最大動態轉矩與脈沖頻率成反比,為保證步進電動機的出功能力,設置實驗智能化步進電動機的工作頻率范圍為20 Hz~2 000 Hz。為使實驗結果更加清晰準確,將實驗工作頻率范圍分成20 Hz~200 Hz、200 Hz~2 000 Hz 2個頻率段,利用C++語言編程測量步進電動機脈沖頻率精度,并將本文方法與激光干涉方法和模型變換方法進行比較,以給定頻率為橫坐標,頻率誤差為縱坐標,頻率誤差為實際頻率與理論頻率之差,實驗結果如圖10、圖11所示。 圖10 20 Hz~200 Hz頻率段電機頻率誤差 圖11 200 Hz~2 000 Hz頻率段電機頻率誤差 從圖10和圖11可以看出,兩種方法的頻率誤差隨著給定頻率的增加而增加,本文方法控制的步進電動機誤差較小,在給定頻率為20~2 000 Hz之間,最大誤差均未超過2 Hz,并且輸出頻率較為穩定,基本無波動。而激光干涉方法和模型變換方法控制的步進電動機誤差較大,波動范圍大,輸出頻率不穩定。 為進一步分析兩種方法對步進電動機的控制穩定性,在3個頻率段內分別選取100 Hz、500 Hz和1 000 Hz 3個頻率值進行10次測試,測試結果如表2所示。 從表2輸出頻率結果對比可以看出,本文方法控制的步進電動機在給定100 Hz、500 Hz和1 000 Hz 3個頻率值時的輸出頻率誤差均不超過2 Hz,明顯低于激光干涉方法和模型變化方法控制的步進電動機輸出頻率誤差,說明了本文方法控制的步進電動機具有較高的精準性。 統計上述步進電動機控制實驗過程中,兩種方法的控制性能,統計結果如圖12所示。 圖12 3種方法控制性能對比 從圖12可以看出,本文方法的控制精度、控制效率、魯棒性以及靈敏性均高于95%,耗能性數值低于5%,各項性能均優于激光干涉方法和模型變換方法。對比結果說明本文方法對步進電動機具有較高的控制性能,應用價值高。 對兩種傳統方法和本文方法的應用過程同時施加相同的外界干擾,對比統計不同方法的電壓波動值,比較結果如圖13所示。從圖13可知,傳統步進電動機多軸向聯動控制方法的電壓波動較大,大概分布在-40~40 V之間。本文方法的電壓波動值穩定在-10~10 V之間。可以看出,本文方法受到外界干擾時電壓波動值明顯低于傳統模型,表明本文模型的抗干擾能力明顯較強。 圖13 模型抗干擾能力測試比較結果 隨著工業生產步入智能化,對步進電動機的精度要求越來越高,本文研究了智能化步進電動機的多軸向控制方法,通過步進電動機多軸向的聯動實現智能化步進電動機的高效控制。實驗結果表明,該方法進行多軸向集中控制下的步進電動機控制精度高,運行過程穩定,并且多軸向集中控制精度、控制效率、魯棒性以及靈敏性均高于95%,耗能性數值低于5%,具有理想的抗干擾性能,是一種高效環保的步進電動機多軸向集中控制方法,可應用于實際的工業生產中。
1.3 步進電動機多軸向聯動控制


2 實驗分析




3 結 語
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14建材發展導向(2021年10期)2021-07-16 07:13:24印刷工業(2020年4期)2020-10-27 02:46:02印刷工業(2020年4期)2020-10-27 02:45:52兒童故事畫報(2019年5期)2019-05-26 14:26:14中國交通信息化(2017年4期)2017-06-06 07:21:52Coco薇(2016年2期)2016-03-22 02:42:52Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12能源(2015年8期)2015-05-26 09:15:56