航天服軟關節小樣本阻力矩預測方法研究
2022-08-26 06:43:30董長林周仕明李道奎
載人航天 2022年4期
關鍵詞:模型
董長林,周仕明,李道奎*
(1.國防科技大學空天科學學院,長沙 410073;2.空天任務智能規劃與仿真湖南省重點實驗室,長沙 410073)
1 引言
艙外航天服是航天員出艙活動必須穿戴的個人防護裝備。航天服充氣后出現內外壓差,導致作業過程中出現氣體壓縮和材料變形等現象,它們共同作用在關節處產生阻力矩,影響航天員的作業能力。因此,艙外航天服的關節阻力矩大小對軟關節的靈活性和可靠性影響較大。由于航天員與不同結構、不同尺寸的航天服之間存在著不同的人-服耦合特性,因而阻力矩特性不同。考慮上述特性對航天服進行迭代與優化時,仿真和實驗的成本高、效率低,故建立小樣本阻力矩預測方法對航天服設計開發階段具有重要意義。
航天服關節阻力矩特性研究大致包括關節阻力矩實驗、有限元分析、理論計算和阻力矩預測4個研究階段。早期研究主要采用實驗方法。Vykukal等設計了一種航天服關節阻力矩外置法測量裝置,為外置法實驗的發展打下了基礎。Matty提出了一種能夠消除重力影響的水平面內的測量方法,在關節阻力矩實驗中應用廣泛。在此基礎上,Meyen等針對航天服軟關節進行了內置法實驗,并測得內置法驅動的關節阻力矩。王曉東等進行了航天服上肢關節艙外作業的實驗研究,發現關節阻力矩不僅具有遲滯特性,還具有歷程特性。通過實驗研究能夠獲得阻力矩特性,但成本高、效率低,在設計優化階段難以窮舉。
伴隨計算機科學技術的發展,逐漸利用仿真分析進行關節阻力特性的研究,以降低成本。Furuya等進行了航天服圓筒關節模型和波紋管關節模型的彎曲仿真,并分析了彎曲過程中褶皺出現原因及其發展的過程。尚坤等針對航天服平褶式關節進行了有限元仿真,并通過能量法分析得知關節阻力矩是由氣體壓縮、材料變形及摩擦共同作用所導致。王魯豫等開展了航天服波紋式髖關節仿真研究,并以關節阻力矩和壓縮氣體做功最小為目標進行了優化,提高了關節的靈活性和操作性。然而,對于復雜運動歷程或考慮不同人-服耦合特性時,有限元方法的計算效率較低。
為解決上述問題,嘗試采用理論方法求解航天服的關節阻力矩。Schmidt建立了航天服關節膜和梁的理論模型,并通過實驗驗證了航天服關節更符合膜簡化模型,即關節阻力矩主要是由壓縮氣體做功引起的;然后基于膜模型建立了無人狀態關節運動變形的解析模型,但由于體積計算存在誤差且僅考慮壓縮氣體產生的阻力矩,導致該模型僅適用于小角度范圍的關節轉動。李廣利等通過能量法推導了無人狀態下波紋式關節的阻力矩方程,但其僅在彈性范圍內適用,且難以考慮材料遲滯特性、厚度等因素的影響,與工程實際中的人-服耦合存在一定的誤差。綜上,現有的理論方法在變形假設和體積計算方面均存在誤差,不適用于關節轉角較大時的阻力矩計算;且難以開展人-服耦合特性分析,因而在工程中的應用受到很大限制。
鑒于理論方法的局限性,基于已有的實驗和仿真成果,阻力矩預測模型方面的研究逐步開展,以提高復雜運動歷程下關節阻力矩的求解效率。Schmidt首先引入Preisach模型實現了對時間歷程下航天服關節阻力矩的預測,且精度較高。后續研究不斷針對Preisach模型進行改進和優化,以提高關節阻力矩的預測精度:文劍通過BP神經網絡建立了基于Preisach模型的關節阻力矩預測模型,取得了較高的模型預測精度,但模型所需數據量較大且訓練時間長;念龍生等提出了一種基于Preisach模型的內插方法,劉文樵將該方法應用于航天服關節阻力矩預測,取得了較好的預測精度。另外,也有部分學者嘗試將不同方法或模型應用于航天服關節阻力矩的研究:王昊等、趙京東等通過外置法實驗測得航天服關節阻力矩,并通過樣條曲線對實驗數據進行了擬合,但難以進行高精度的外插和預測;張新軍等采用電磁學領域的Jiles-Atherton遲滯模型,通過遺傳算法進行了參數辨識,進而對單歷程阻力矩進行了擬合,但由于模型本身的對稱性,擬合效果并不理想,因此該模型在航天服關節阻力矩領域的應用存在局限。可見,相對于其他方法,Preisach模型能夠較好地表征關節阻力矩的遲滯特性和歷程特性,但仍需要大量的實驗數據才能準確預測關節阻力矩,否則預測結果會出現較大誤差。
綜上所述,為改善Preisach模型對數據樣本的依賴性,本文深入分析Preisach模型在小樣本條件下預測誤差產生的原因,并對該模型進行修正;進一步,針對修正后的模型推導由于樣本減小而產生的預測誤差,進而提出小樣本條件下的阻力矩預測方法,并對該方法進行驗證。
2 基于Preisach模型的阻力矩預測誤差分析與修正
2.1 Preisach模型
在航天服關節彎曲伸展過程中,由于氣體做功、材料變形等因素影響,關節阻力矩在單歷程運動中具有明顯的遲滯特性,且在復雜歷程運動中具有歷程相關性。Preisach模型作為基于唯象學方法的遲滯模型預測方法,能夠考慮歷程特性用于航天服關節阻力矩的預測。Preisach模型將阻力矩曲線轉換為另一平面的積分形式描述,該模型數學描述如公式(1)所示:

式中,()是時刻關節阻力矩大小。(,)是遲滯函數。()是時刻輸入轉角大小,以劃分正、負積分平面,定義正、負積分區域分別為、,如圖1所示。γ[()]為基于關節轉角()的符號函數,在正向區域為+1,在負向區域為-1。基于()對積分平面分割和γ[()]的正負性,利用積分區域變換性質將式(1)整理為式(2)。

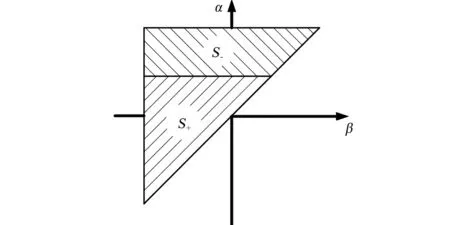
圖1 預測模型積分平面Fig.1 Integral plane of the prediction model
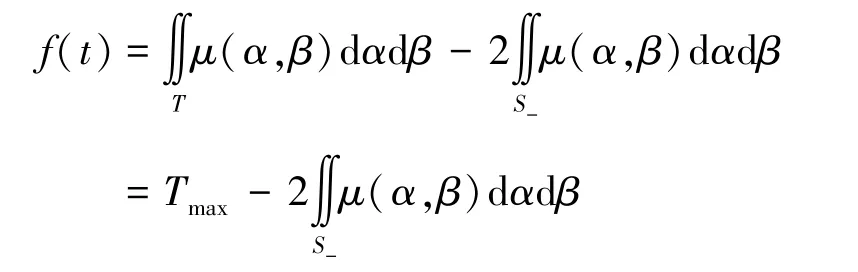
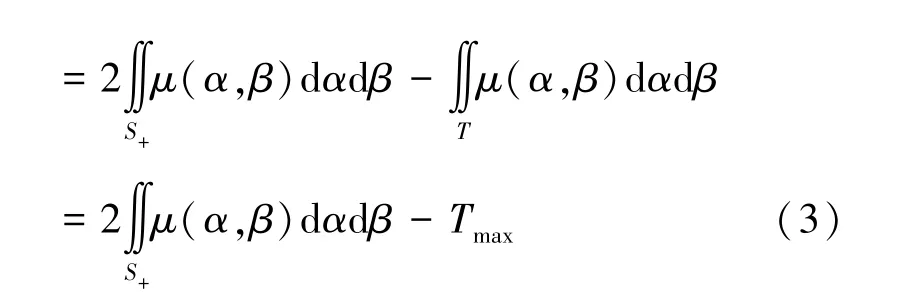
定義整個積分平面為,則有整個積分平面內均為正積分時的積分值為。根據運動歷程轉角變化情況對積分平面的分割,可將式(2)轉換為正積分或者負積分的表述形式,如式(3)所示。
關節復雜運動歷程對應積分平面的變化情況如圖2(a)所示。根據積分平面變化情況將歷程曲線劃分為3段:①段關節轉角增加,隨關節轉角增加水平邊界上移,使得積分區域變化;②段為關節轉角加載到極值點后卸載過程,在積分平面斜邊邊界處增加豎直邊界,隨關節轉角減小豎直邊界左移改變積分區域;③段為卸載到極小值后再加載過程,在積分平面斜邊邊界處增加另一水平邊界,隨轉角增大水平邊界上移,改變正負積分區域。同上述方法,關節轉角歷程轉化為正負積分區域的變化,正負積分區域邊界拐點對應關節加載卸載歷程中極值點,如圖2(b)所示。因此,該方法可以記錄關節運動歷程對現有關節阻力矩的影響,即模型能夠考慮關節運動的歷程特性。
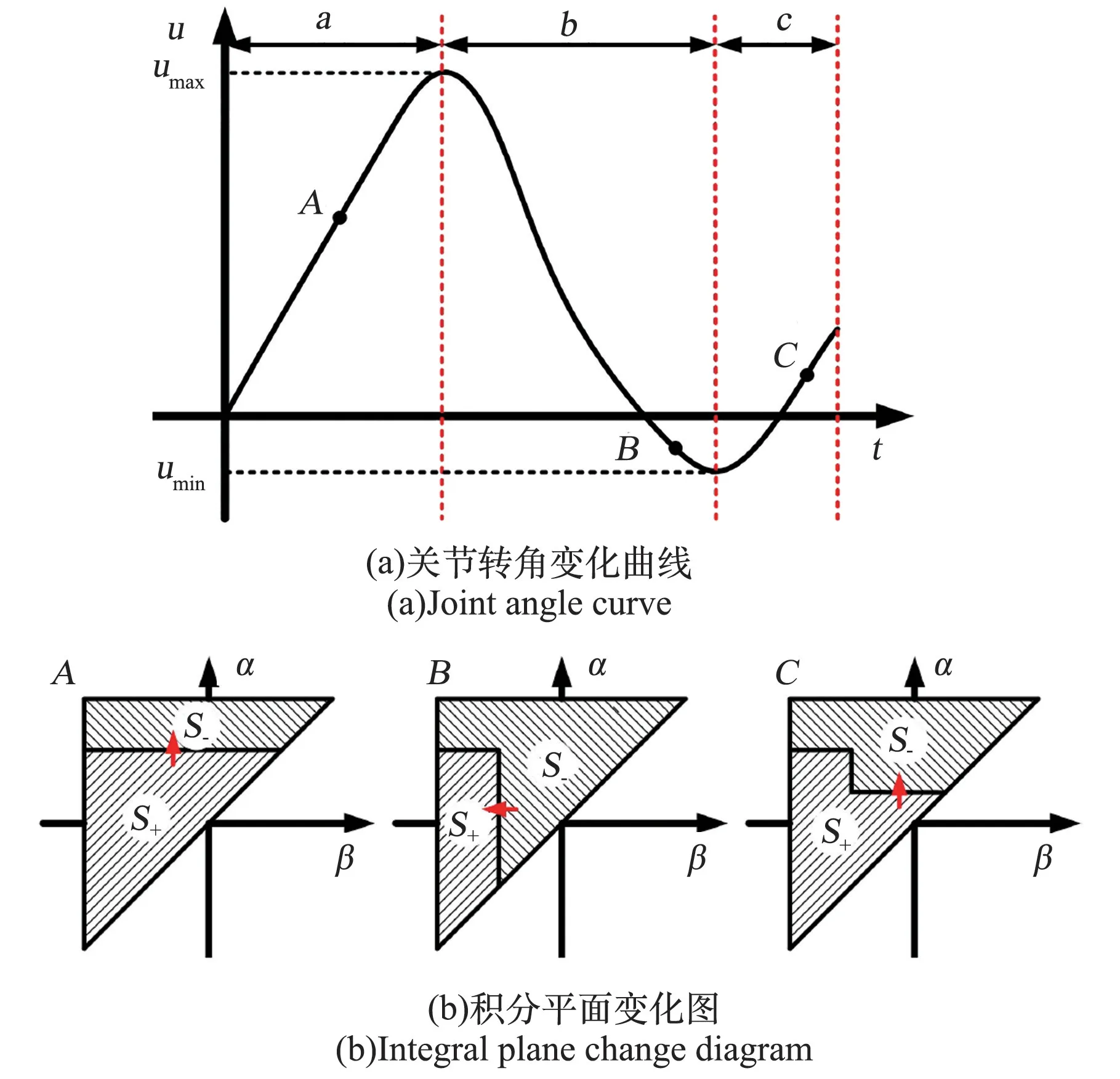
圖2 加卸載歷程對積分平面分割Fig.2 Influence of loading and unloading process on integral plane segmentation
當關節運動歷程為單歷程加載卸載時,關節阻力矩及積分面變化如圖3所示,定義(α,β)為轉角先加載至α再卸載至β對應阻力矩變化值,可以得到加載至α再卸載至β時阻力矩差值與積分區域的關系如式(4)所示。

圖3 加卸載阻力矩變化對應面積分變化關系Fig.3 Relationship between change of loading and unloading resistance torque and change of area fraction
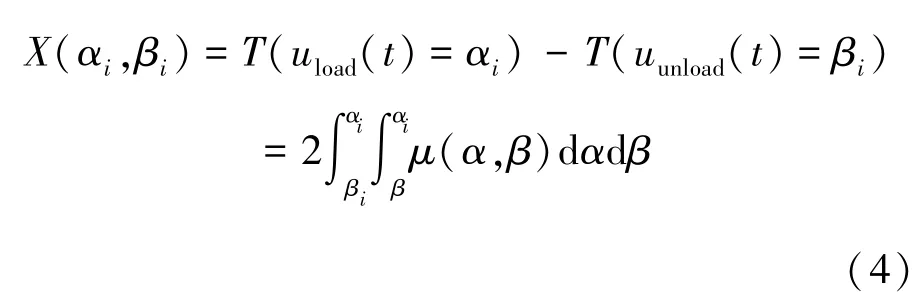
由圖3可通過關節單歷程運動將整個積分平面離散化,即通過積分幾何意義描述。同理,可將式(1)微分,通過遲滯函數對積分平面進行表征,遲滯函數的微分形式如式(5)所示:

Preisach模型是一種唯象學模型,若采用式(5)通過遲滯函數連續描述積分平面,由于含微分項,受實驗數據噪聲影響會導致遲滯函數和積分后阻力矩預測產生較大誤差。因此,本文采用積分幾何意義的方法對積分平面進行表征。
基于航天服關節單歷程加卸載過程,阻力矩差值對應圖4中紅色卸載區域面積分積分值的2倍,通過每次加載至極值點α后卸載,將數據點離散可對應多個β值。因此,可以根據輸入數據將整個積分平面離散為不同α和β,如圖4所示。
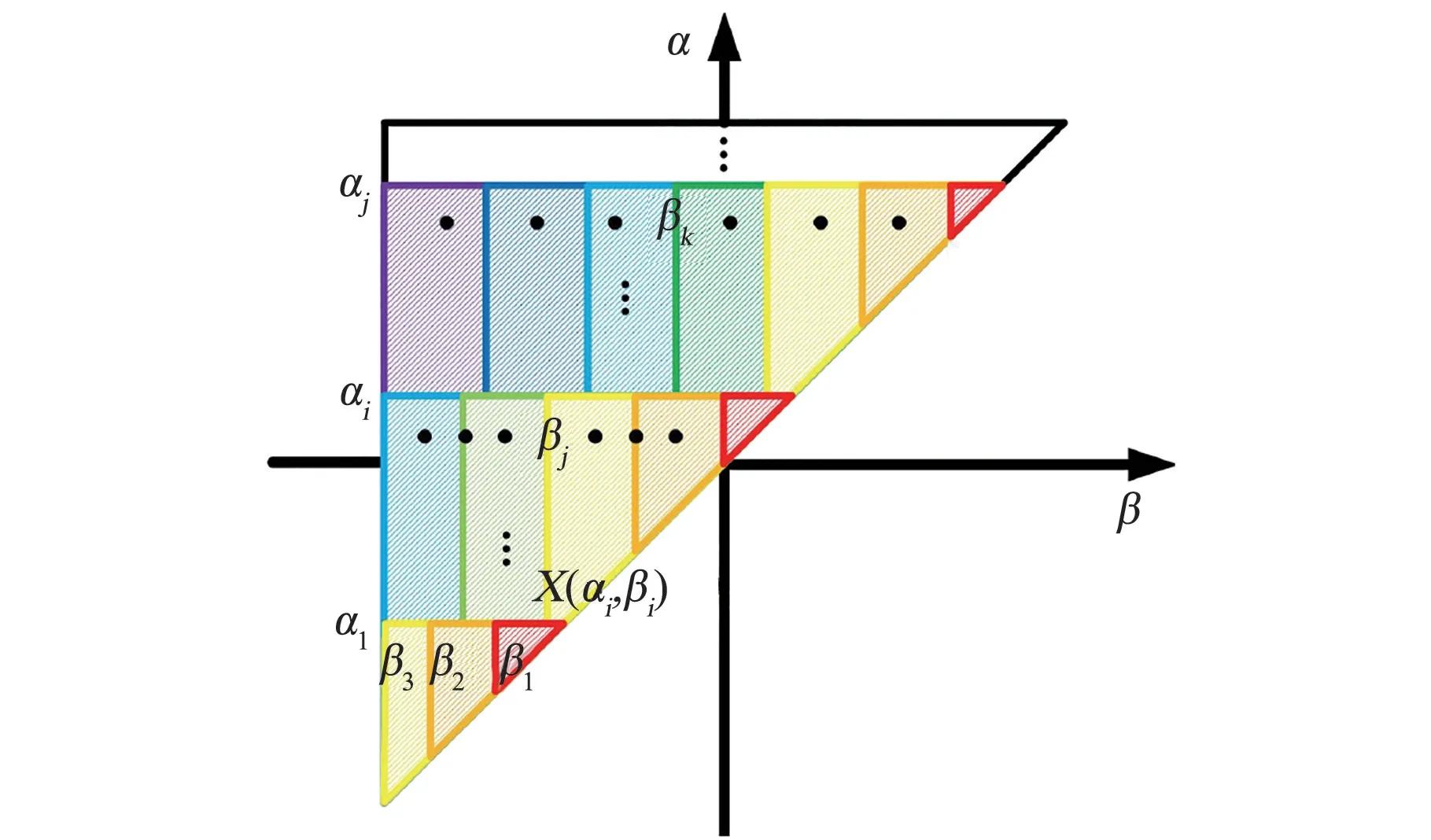
圖4 積分平面離散圖Fig.4 Integral plane discretization diagram
基于上述離散方法可以將整個積分平面離散為(α,β)形式,因此針對任意給定積分區域范圍,如圖5所示,其正積分區域積分值可表述為式(6)。

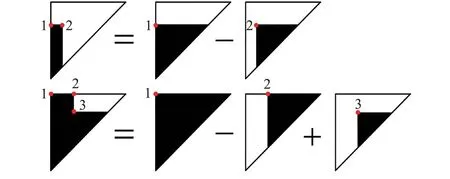
圖5 積分平面分解圖Fig.5 Diagram of integral plane decomposition
將式(6)帶入式(3),整理得到任意歷程下關節阻力矩計算公式,如式(7)所示。
2.2 Preisach模型預測誤差分析
為了將積分平面準確對應于離散的積分點,需要大量實驗數據將積分平面進行離散,因此樣本數會對積分平面表征精度產生影響。但由于預測點并不一定落在給定數據上,對預測點的面積分可以采用不同的內部插值方式進行計算,本文以精度高、參數少的權重系數法為例,對樣本減小所引起的模型預測誤差展開分析。
積分區域由=,=-,=作為邊界構成,因此不同運動歷程對應阻力矩預測可分為3點預測和4點預測。3點預測對應在=邊界附近的預測值,4點預測則對應遠離=邊界的預測值,如圖6所示。

圖6 基于臨近點預測示意圖Fig.6 Schematic diagram based on near point prediction
基于臨近點預測,小樣本較大樣本條件下,臨近點數據位置發生移動,樣本減小后對同一點的預測如圖7所示。

圖7 數據點減少臨近點預測示意圖Fig.7 Schematic diagram based on near point prediction with data reduction


則有對任意預測點的計算方法如式(9)所示。

采用單歷程加卸載最大轉角分別為20°,40°,60°共3組數據對肘關節復雜運動歷程進行預測的結果,如圖8所示。圖8(a)中段為航天服內部充氣階段;段為關節初始運動階段;段關節進行特征性運動,阻力矩隨關節運動變化;段關節運動停止,阻力矩基本保持不變。段、段與段為非預測段,段能夠反映關節復雜運動過程中阻力矩特性,為預測研究段。由圖8(d)可知,預測范圍內在極值點附近預測誤差較非極值附近預測誤差明顯增大,且該預測誤差對極值點后續預測產生影響,驗證上述分析正確性。

圖8 3組輸入數據預測結果Fig.8 Prediction results of 3 groups of input data
2.3 Preisach模型預測誤差修正
由于在積分平面邊界=較非邊界處樣本減小引起的誤差較大,且模型的歷程特性會導致極值點的預測誤差對后續產生影響,因此主要針對該邊界處進行修正。
式(5)中采用遲滯函數微分方式表征積分平面,由于遲滯函數誤差會導致阻力矩預測誤差,故采用積分幾何意義對積分平面離散,通過權重系數法進行預測點面積分的計算。在小樣本條件下,數據點偏移較大導致臨近點中非零項權重變化,產生極值點處的預測誤差。
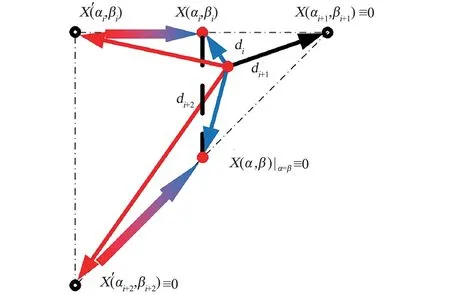
圖9 邊界附近預測點積分平面修正Fig.9 Integral plane correction of prediction points nears boundary
模型修正后,同樣采用上述3組數據進行預測,結果如圖10所示。修正后預測曲線較未修正預測曲線在極值點處能夠一定程度降低模型的預測誤差,但關節阻力矩仍存在較大誤差。在阻力矩最大值附近未出現較大預測誤差,這是由于輸入數據含60°單歷程遲滯曲線臨近最大阻力矩對應關節轉角。
由圖10可知,采用同樣的輸入數據對復雜運動歷程進行預測,模型修正后能夠明顯提高極值點附近的預測精度。但在數據較少時,積分平面表征精度不足,使得預測點積分值計算不準確,預測結果在極值點附近仍存在明顯誤差。因此,有必要針對修正后模型作進一步分析。
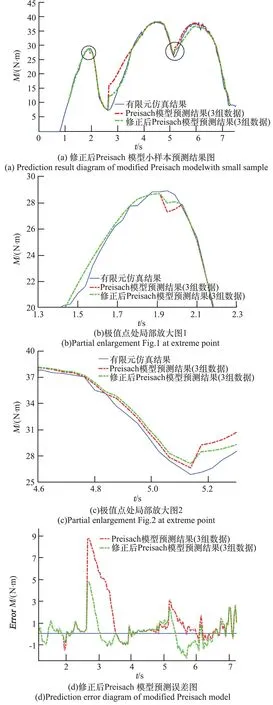
圖10 積分平面修正后3組輸入數據預測結果Fig.10 Prediction results of 3 groups of input data after integral plane correction
3 小樣本阻力矩預測方法
3.1 小樣本預測誤差的分析

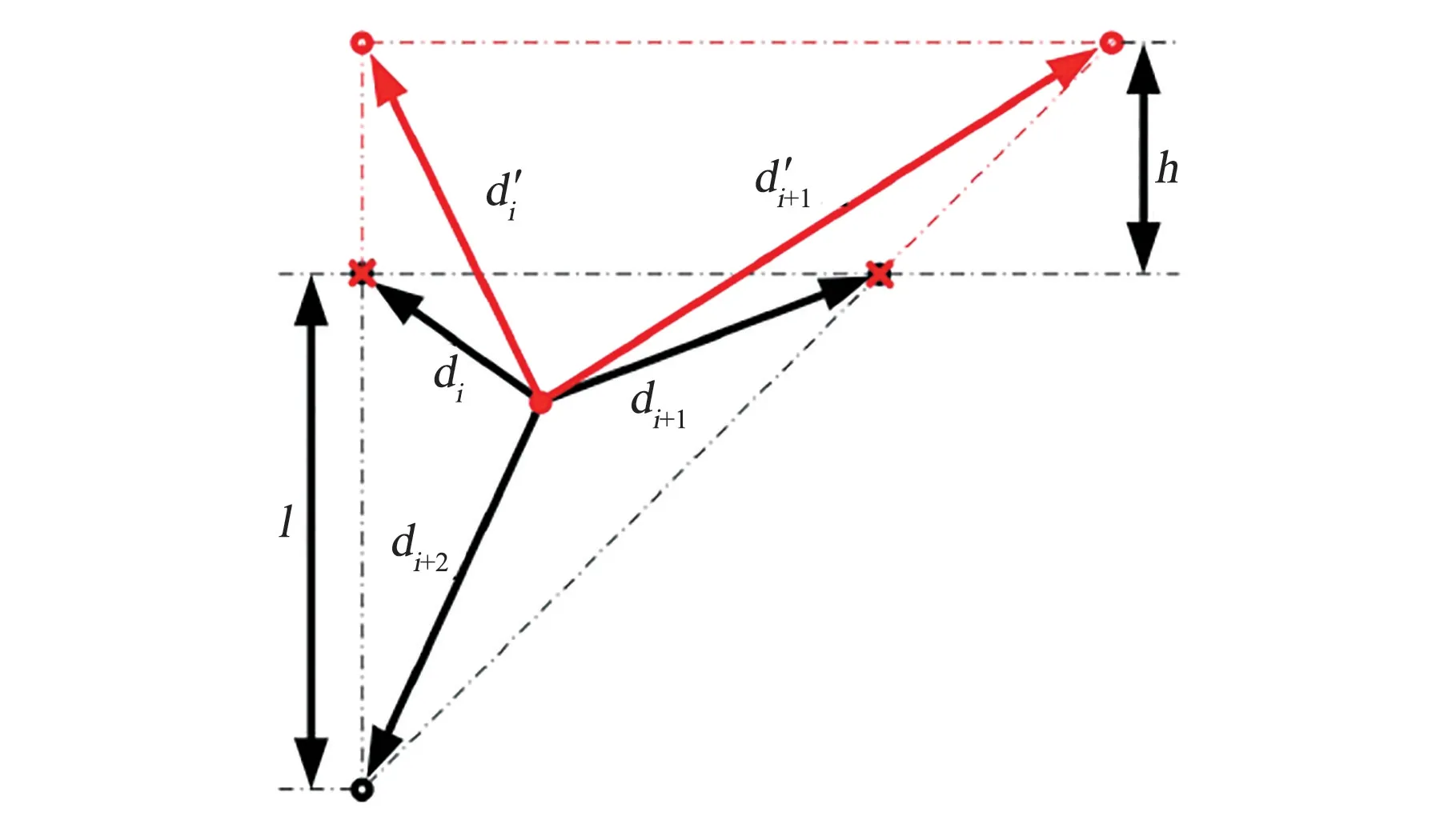
圖11 數據減少導致積分區域變化Fig.11 Changes of integral area due to the decrease of data
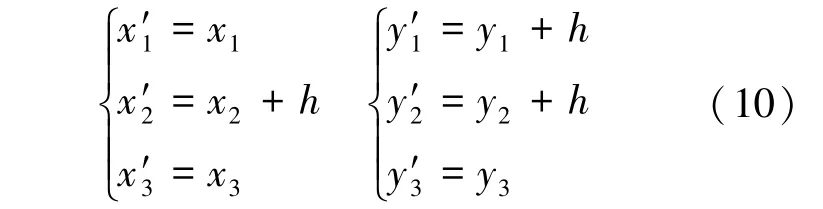
基于式(4),偏移后臨近非零點的面積分′,通過積分幾何意義可表述為式(11)。


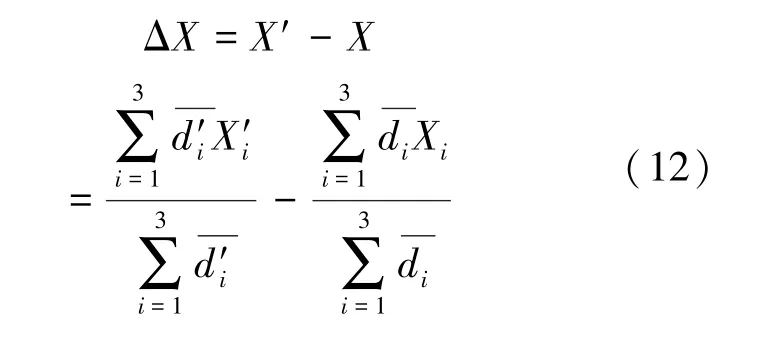
考慮到由于數據減少帶來的偏移遠大于臨近范圍預測尺寸,則有式(13)所示。
針對Δ可以分為前一部分的高次項和后部分的常數項,主要針對高次項展開分析。略去其中小量,可簡化為式(14)。
預測點面積分的預測誤差Δ,主要由數據減少產生的偏移量和d共同決定。由于數據點減少導致模型預測誤差隨著偏移量的增加而顯著增大,與上述分析結果符合。即輸入數據中,極值點較非極值點附近單歷程遲滯曲線對積分平面表征貢獻性更大。
3.2 極值點法的小樣本阻力矩預測方法
基于上述對阻力矩預測模型誤差的研究,在關節復雜運動預測過程中,小樣本條件下積分平面邊界=處權重變化,使得極值點處誤差較非邊界處的誤差更大。在此基礎上針對極值點處積分平面進行修正,雖然能在一定程度上降低預測誤差,但修正后模型在極值點附近由于數據點減少而導致模型的預測誤差仍然存在,誤差隨數據減少引起的偏移量增加而明顯增加。
3.1節推導了在小樣本下數據點減少引起的模型預測誤差,確定了預測精度主要由輸入數據遠離極值點的距離而決定,即極值點附近數據較非極值點數據對模型預測精度影響(對積分平面表征貢獻)更大,基于此提出極值點法的小樣本阻力矩預測方法。由于最大誤差位置出現在關節運動過程極值點處,且對后續預測存在影響,因此主要考慮誤差較大的極值點附近對預測的影響,對輸入數據進行限制能夠明顯降低輸入數據數量的同時提高預測精度。輸入數據以關節可能運動過程中主要動作或重復性動作為依據,確定運動歷程,提取關節運動過程中的極值點,對臨近極值點合并以減小輸入樣本大小;對于非極值點的單歷程數據,以能夠提高積分平面表征精度為依據,增加其他有效數據點,依據圖4,提高模型的拓展修正性。以單歷程運動阻力矩-轉角遲滯特性曲線作為輸入,同時對邊界附近積分平面進行修正,實現對關節復雜運動歷程阻力矩的預測。采用極值點法輸入3組數據對任意復雜運動歷程阻力矩的預測結果如圖12所示。
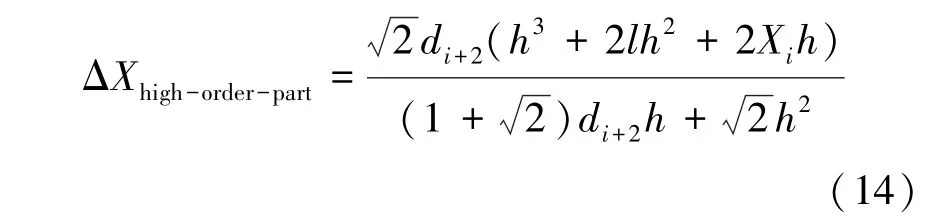
圖12中紅色點劃線為極值點法預測結果,較原模型方法預測結果,最大預測誤差由8.881 Nm降低至2.565 Nm,最大預測誤差明顯降低。采用極值點法能夠在滿足預測精度要求的前提下,顯著降低樣本數量。
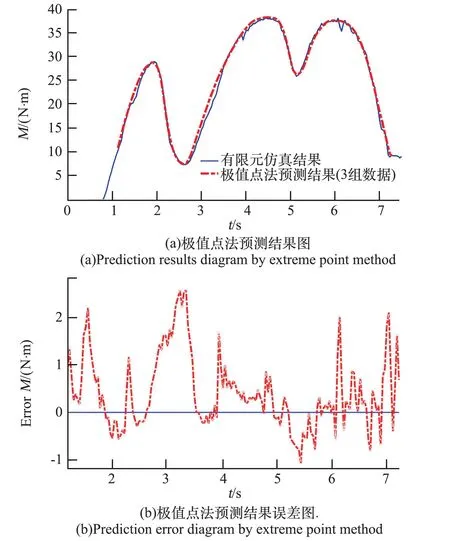
圖12 3組輸入數據極值點法預測結果及誤差圖Fig.12 Prediction results and prediction error of extreme point method for 3 groups of input data
輸入3組數據采用極值點法預測時,能夠顯著降低在極值點處的預測誤差。但圖中3.15 s附近由于該部分較各輸入數據偏移較大,導致該部分積分平面表征存在誤差(可通過對積分平面表征不準確處補充數據,以達到提高精度的目的),因此預測誤差較大,但較原模型誤差仍有明顯減小。這是由于在非積分邊界處的4點預測較3點預測方法受權重變化造成的影響更小,與2.2節分析相一致,因此極值點法能夠在小樣本條件下保證預測精度。
4 航天服軟關節小樣本阻力矩預測驗證
4.1 航天服典型關節運動歷程
航天服肘關節作為上肢作業時主要參與關節,同時肘關節多采用波紋式結構以降低關節彎曲時壓縮體積所引起的阻力矩,因此本文以波紋式肘關節為研究對象針對關節阻力矩的小樣本預測方法進行驗證。按照波紋式關節提取單元模型相關參數如圖13所示。
圖13 波紋式肘關節單元結構參數示意圖Fig.13 Schematic diagram of structural parameters of corrugated elbow joint unit
上述確定航天服波紋式肘關節結構,根據GJB 36A-2008《飛行員人體模板設計和使用要求》建立170 cm人體大臂、小臂關節人體模型,以此為人-服耦合模型研究對象。以單歷程加卸載過程關節阻力矩隨轉角變化的遲滯特性曲線作為預測模型的輸入數據,如圖14所示,用于預測復雜運動歷程下關節阻力矩變化情況。
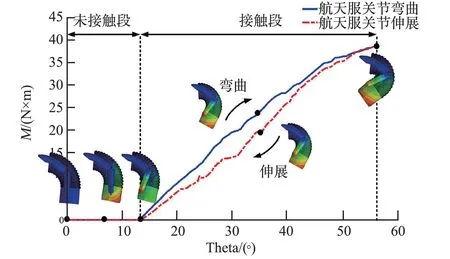
圖14 單歷程關節阻力矩-轉角遲滯特性曲線Fig.14 Resistance torque-angle hysteresis characteristic curve of single path joint
開始時,航天服與人體處于初始狀態并進行充氣;充氣完成后,航天服采用內置法人體驅動方式運動,肘關節轉動至12.9°時,人體與航天服剛產生接觸;按照圖14中藍色實線關節彎曲加載至轉動最大角度,阻力矩增加;而后按照紅色點劃線關節伸展卸載至初始狀態,阻力矩減小。加卸載曲線不重合,阻力矩在關節加載、卸載過程呈現明顯遲滯特性。在之前的研究中,通過實驗驗證了有限元仿真分析方法的正確性和有效性,因此以仿真數據代替實驗進行驗證。
任取航天服關節運動歷程,如圖15所示。將關節運動歷程分為3段:段由于人體與航天服從未接觸狀態轉變為剛產生接觸,航天服開始產生體積壓縮和材料彈性變形等,作用于關節產生阻力矩;段人體關節持續運動與航天服接觸,阻力矩隨關節運動變化;段關節停止運動,直至仿真分析結束。段人服剛接觸,關節阻力矩較小、段關節保持不動至計算結束,阻力矩基本保持不變。因此以段關節運動為預測段進行關節阻力矩預測,即以圖15中黑色實線展開研究。
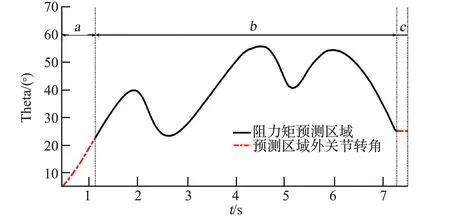
圖15 關節運動歷程曲線Fig.15 Motion history curve of the joint
由于航天服關節阻力矩具有遲滯特性與歷程相關性,預測段曲線具有加載段和卸載段能夠反應阻力矩的遲滯特性;且該段曲線存在卸載后過加載以及卸載后非過加載后卸載過程,能夠充分體現運動加載歷程對關節阻力矩產生的影響。因此該曲線能夠特征明確地反映關節運動過程中可能存在的特性,故選用該曲線作為復雜運動歷程特征曲線進行關節阻力矩預測。
4.2 航天服關節阻力矩預測結果分析
在給定范圍內分別采用均勻取點方式與極值點法2種方式進行預測,結果如圖16所示。圖16中黑色實線為仿真分析結果關節阻力矩隨時間變化曲線、紅色點劃線為基于Preisach模型小樣本下阻力矩預測結果、綠色點劃線為修正后Preisach模型阻力矩預測結果、藍色點劃線為采用極值點法在相同數據量下阻力矩預測結果。分別輸入3、5、7組數據,預測結果如圖16(a)~(c)所示,預測結果方差見表1。
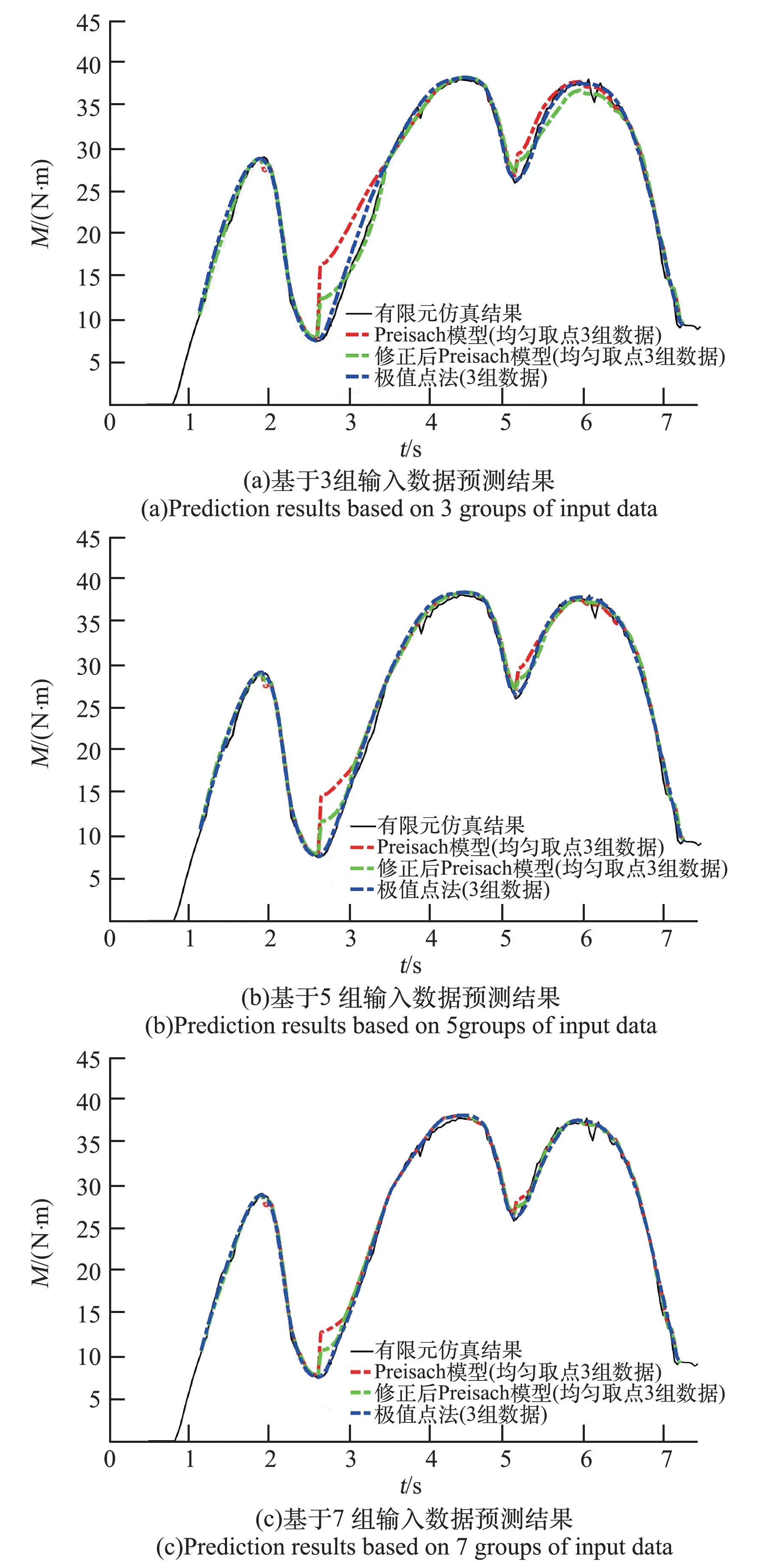
圖16 不同組數據預測結果Fig.16 Prediction results of different groups of data
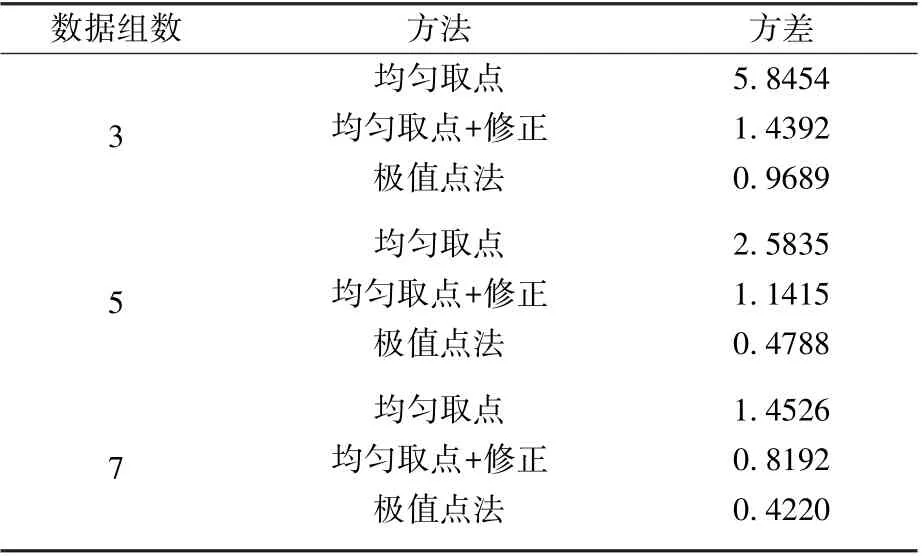
表1 不同方法模型預測誤差Table 1 Prediction error of different methods
通過驗證,采用極值點法能夠明顯降低對實驗數據數量的需求,并提高模型的預測精度;較Preisach模型及修正后的Preisach模型均勻取點方法精度明顯提升,且能夠避免局部較大誤差。驗證了該方法的有效性和正確性。
輸入不同組數數據時,采用極值點法對關節阻力矩進行預測,結果如圖17所示,預測誤差見表1。
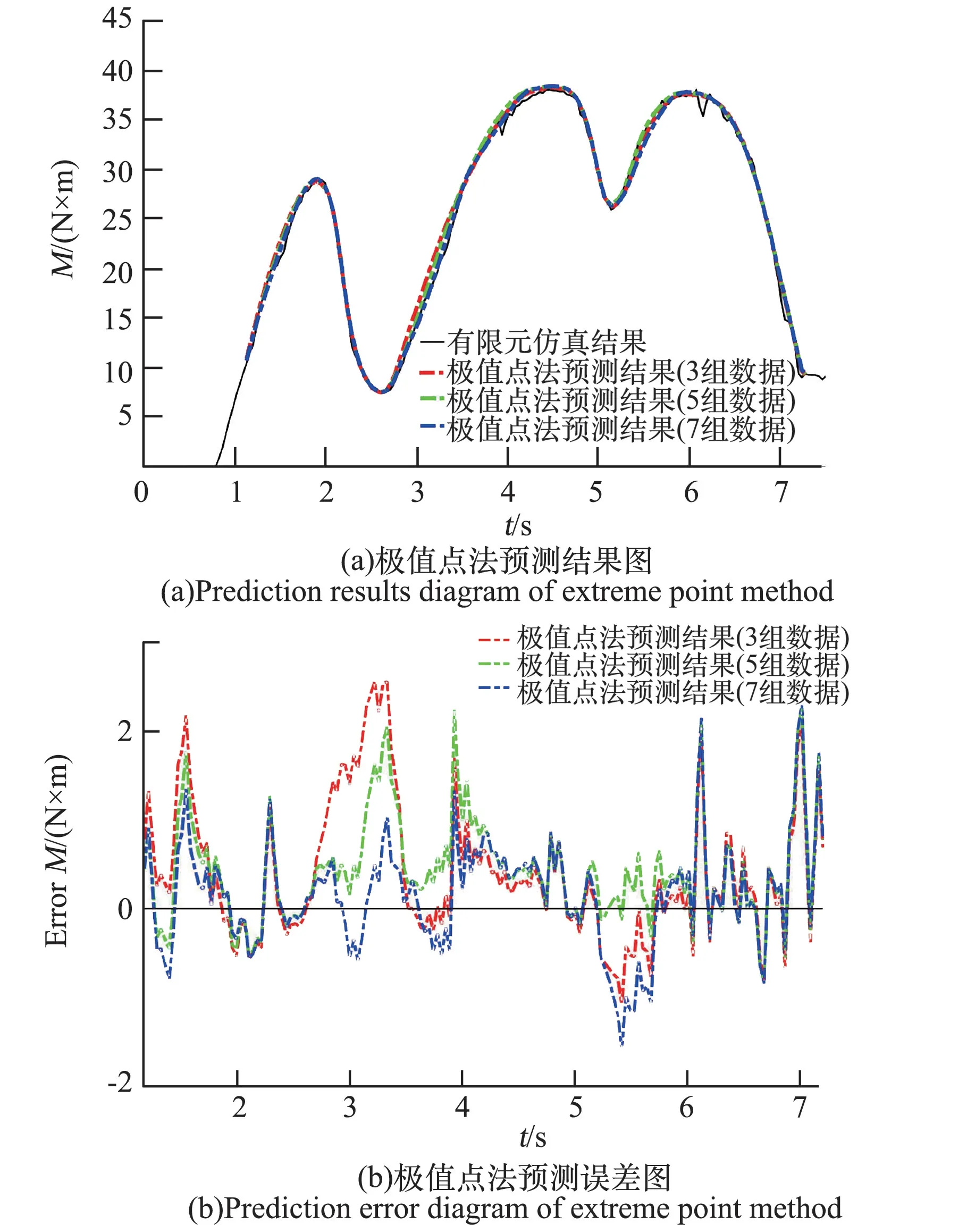
圖17 不同組輸入數據輸入模型預測結果Fig.17 Prediction results of the model for different groups of input data
由于通過積分幾何意義對積分平面進行表征,采用內插方式確定預測點積分值,隨輸入有效數據組數增加,離散數據能夠更精確的表征積分平面的變化,使預測誤差降低,因此該方法能夠隨有效數據增加進行拓展修正。同時,該方法能夠在小樣本條件下,達到較高的精度要求。對試驗及仿真時測試點的選取具有指導意義。
5 結論
本文分析了Preisach模型預測誤差產生的原因,修正了模型的積分平面,推導了數據減少引起的預測誤差,并基于此提出了極值點法的航天服軟關節小樣本阻力矩預測方法,該方法能夠在保證模型預測精度條件下顯著降低對數據量的需求。主要結論如下:
1)從Preisach模型預測原理出發,對小樣本阻力矩預測時產生局部較大誤差的現象進行了分析,得到了誤差產生是數據點權重系數變化所導致。
2)基于阻力矩預測模型原理和誤差分析,利用積分平面性質,對Preisach模型預測過程進行了修正,降低了權重系數變化產生的影響,減小了預測誤差。
3)推導了小樣本下數據較少所引起的預測誤差,提出了極值點法的小樣本阻力矩預測方法,顯著降低了對數據量的需求并提高了預測精度,且該方法能隨有效數據的增加進行拓展修正。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19