周家河水文站側掃雷達在線流量比測率定分析
2022-08-26 14:23:46包晶
陜西水利 2022年7期
包 晶
(安慶水文水資源局,安徽 安慶 246003)
0 引言
根據安徽省水文局測區改革方案,周家河水文站隸屬于太湖測區,距離太湖勘測隊約80 km左右路程,且均為山區道路,單程需要2.5 小時的通勤時間;此外周家河水文站為山區性河流,洪水陡漲陡落,洪峰持續時間短,難以準確把握好測驗時間。為徹底解決該站的中高水流量測驗困難,消除潛在的安全隱患,引進自動測流系統設備勢在必行,通過多種方案的分析比選,認為側掃雷達在線測流系統是目前最適合安裝在周家河站的自動測流設備。
1 概況
1.1 水文站基本情況
周家河水文站設立于1957 年11 月,位于安徽省太湖縣牛鎮鎮羊河村。該站控制集水面積540 km2,距河口12 km,屬于國家重要水文站,二類精度站,大別山區500 km2~1000 km2代表站兼花涼亭水庫入庫站。 測驗項目有水位、流量、泥沙、降雨量,主要為防汛抗旱、水資源、水質等服務。
1.2 測站特性及測驗河段情況
周家河站測驗河段較順直,主流偏左岸,左右兩岸均為高山。左岸為風化石陡壁,右岸為花崗巖陡壁,無崩塌現象。中水時河寬約120 m,高水時約140 m。斷面上游左岸140 m處有兩小溝匯入,下游80 m處低水有急灘控制,水位在96.50 m以上時控制消失。河床質為卵石沙礫。上游約800 m和下游700 m處均為彎道,無水草現象。漲水時河道內漂浮物較多。斷面上游約10 km處建有獅子口電站,2 km處建有羊河電站,低水水位受電站發電來水影響較大,多呈鋸齒狀。中高水期間由于河段比降大,水位~流量關系線為逆時針繩套。全年多采用臨時曲線法、連時序法推流。
根據典型年法對周家河水文站水位級進行水位級劃分,見表1。

表1 周家河水文站水位級劃分
2 自動測流系統情況
2.1 測流原理
雷達是利用目標對電磁波的反射(或散射)現象來發現目標并測定其位置和速度等信息的。雷達利用接收回波與發射波的時間差來測定距離,利用電波傳播的多普勒效應來測量目標的運動速度,并利用目標回波在各天線通道上幅度或相位的差異來判別其方向。
超高頻雷達河流流速(流量)監測技術還用到另外一項理論——Bragg散射理論。Bragg散射理論可由圖1簡單說明。當雷達電磁波與其波長一半的水波作用時,同一波列不同位置的后向回波在相位上差異值為2或2的整數倍,因而產生增強性Bragg后向散射。

圖1 Bragg后向散射基本原理
朝向雷達波動的波浪會產生一個正的多普勒頻移,背離雷達波動的波浪會產生一個負的多普勒頻移。多普勒頻移的大小由波動相速度Vp決定。由于重力的影響,一定波長的波浪的相速度是一定的。在深水條件下(即水深在大于波浪波長L的一半)波浪相速度Vp滿足以下(1)定義:

由相速度Vp產生的多普勒頻移為:

其中,雷達頻率fo以MHz為單位,多普勒頻率fB以Hz為單位。這個頻偏就是所謂的Bragg頻移。朝向雷達波動的波浪將產生正的頻移(正的Bragg峰位置),背離雷達波動的波浪將產生負的頻移(負的Bragg峰位置)。
在無表面流的情況下,Bragg峰的位置正好位于(2)式描述的頻率位置。
當水體表面存在表面流時,上述一階散射回波所對應的波浪行進速度便是河流徑向速度加上無河流時的波浪相速度。即:

此時,雷達一階散射回波的幅度不變,而雷達回波的頻移為:

通過判斷一階Bragg峰位置偏離標準Bragg峰的程度,我們就能計算出波浪的徑向流速。實際探測時,由于河流表面徑向流分量很多,一階峰會被展寬,見圖2。
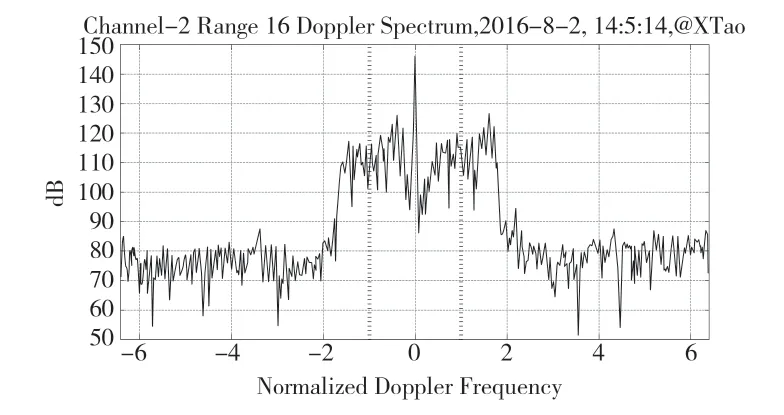
圖2 超高頻雷達RISMAR-U獲得的河流表面回波多普勒譜
單站超高頻雷達可以獲得表面徑向流。利用相隔一定距離的雙站超高頻雷達獲得各自站位的徑向流后,通過矢量投影與合成的方法就可以得到矢量流。雙站徑向流合成矢量流的原理見圖3。
隨著社會主義市場經濟體制的逐步建立,我國水利的投資融資機制開始向多元化、多層次、多渠道的融資體制方向發展,對于建立“三多”的投融資機制,七部委《意見》給出了有益的意見。

圖3 雙雷達站獲取矢量流示意圖
超高頻雷達RISMAR-U屬于相干脈沖多普勒雷達,工作中心頻率為340 MHz,采用線性調頻中斷連續波體制。一般情況下可以測量30 m~400 m寬度的河流,雷達的實際探測距離還與雷達天線架設地點,所在地外部噪聲電平,河面粗糙程度有關。
雷達的距離分辨率有5 m、10 m、15 m等幾種,可以根據需要設定。
對于等寬的順直河道,河水流向與河岸是平行的。如圖4所示,河道為順直河道。雷達在A點測得的徑向流速為VAcr,由于A點河流的流向與河岸平行,則該點的河水流速為VA=VAcr/cos(β)。雷達在B點測得的徑向流速為VBcr,則B點的河水流速為VB=VBcr/cosα。如果A點、B點與河岸的垂直距離相同,理論上有VA=VB。

圖4 單一雷達站獲取水流速示意圖
2.2 RISMAR-U型系列超高頻雷達概況
RISMAR-U型系列超高頻雷達(河流流量探測儀)廣泛用于河流流量實時監測領域,它利用水波具有相速度和水平移動速度時,將對入射的雷達波產生多普勒頻移的原理來探測河流表面動力學參數,以非接觸的方式獲得大范圍的河流表面流的流速、流向,并根據流體力學理論,從雷達遙測的表面流速反演深層流速,進而準確地計算出河流流量信息。

圖5 RISMAR-U型系列超高頻雷達結構圖
根據河道的條件與用戶需求的不同,RISMAR-U可配置為單站式流量推測系統和雙站式流量推測系統。
在河道等寬的順直河道,可以使用單站式系統實現流量探測。單站式流量探測系統的野外站由單臺RISMAR-U雷達系統和一個RISMAR-U中心站構成。

圖6 單站式流量探測系統的野外站
在河道不等寬、非順直河道及其他流場復雜的場合,應該使用雙站式系統實現流量探測。雙站式流量探測系統的野外站包含二臺RISMAR-U雷達系統和一個RISMAR-U中心站構成。

圖7 雙站式流量探測系統的野外站
一個完整的流速流量探測系統由至少一個野外站和一個中心站組成。一個野外站系統包含收發天線、雷達主機、計算機和軟件子系統,一個中心站包含一臺計算機、中心站軟件子系統。
3 數據整理及資料分析
3.1 分析方法
以同一水位,人工流量為縱坐標、側掃雷達在線流量為橫坐標點繪關系圖,進行擬合分析,得出相關關系,計算出側掃雷達重新擬合后的流量數據,再與人工實測流量進行分析。
3.2 相關數據分析
對2021年4月20日至8月13日周家河水文站基本水尺斷面,人工實測流量與側掃雷達在線原始實測流量進行曲線擬合,擬合線性關系見圖8 。

圖8 人工流量與側掃雷達流量線性關系
根據圖8 擬合相關關系可以看出,當側掃雷達在線流量小于200 m3/s時,人工流量與側掃雷達流量擬合相關關系良好;當側掃雷達在線流量大于200 m3/s時,相關關系較為散亂。現對流量進行分級,200 m3/s以上與以下流量分別進行擬合,線性關系圖分別見圖9、圖10。

圖9 周家河站大于200 m3/s人工流量與側掃雷達流量線性關系

圖10 周家河站小于200 m3/s人工流量與側掃雷達流量線性關系
通過擬合線性關系可知,當側掃雷達在線流量大于200 m3/s時,側掃雷達在線流量與人工流量線性關系式為y=0.0038x2-0.7815x+226.02;當側掃雷達在線流量小于200 m3/s時,側掃雷達在線流量與人工流量線性關系式為y=0.0024x2+0.6722x+3.0652。根據相關關系推算出同水位級人工流量對應的側掃雷達率定流量,成果見表2。

表2 側掃雷達在線流量率定分析
以側掃雷達率定流量為橫坐標,人工實測流量為縱坐標點繪關系圖,將其再次擬合,進行對比分析,線性相關關系良好,見圖11,關系式為y=1.0128x-0.8831。

圖11 周家河站人工流量與側掃雷達流量綜合線性關系
3.3 關系線檢驗
通過三項檢驗分析,比測38次人工流量與側掃雷達在線流量復核曲線關系,經檢驗計算隨機不確定度為3.0%,系統誤差為0.6%,滿足規范要求,檢驗成果見表3。

表3 周家河站人工流量~側掃雷達在線流量關系線檢驗計算表
4 結論
(1)側掃雷達測流系統實測流量與人工實測流量關系符合線性相關關系,原始分析資料準確、可靠,比測成果合理。符合《河流流量測驗規范》等相關規范的要求;
(2)周家河站引進側掃雷達自動測流設備達到了預期目的,后期安慶水文局、太湖測區將加強與設備研發單位的合作,進一步完善比測分析相關內容;
(3)周家河站采用側掃雷達在線測流系統施測時,流量成果按下式計算:Q=1.0128Q側-0.8831。
