
基于A-VMD與CNN的行星齒輪箱智能故障診斷方法研究*
2022-08-26 07:58:12陸鳳清王亞東翁潤庭張春良
機電工程技術 2022年7期
陸鳳清,岳 夏,王亞東,翁潤庭,張春良※
(1.廣州大學機械與電氣工程學院,廣州 510006;2.廣州市機電設備狀態監測與控制重點實驗室,廣州 510006)
0 引言
行星齒輪箱以承載力大、傳遞平穩、高效率等特點成為風力發電機的核心傳動系統[1]。然而,齒輪箱內部結構和受力情況極為復雜,且是在變工況、變載荷的情況下運行,加之齒輪箱高速級的齒輪和軸承潤滑環境較差,更提高了齒輪箱故障發生的概率[2]。因此,對行星齒輪箱的狀態進行監測以及故障診斷具有重要意義。
在行星齒輪箱故障診斷中,廣泛應用的信號分解方法有小波分析,經驗模態分解等。小波變換作為一種時頻分析方法,在時域和頻域內都具有良好的局部化特性,已被廣泛用于行星齒輪箱的故障特征提取[3-8]。但由于小波分解不是自適應的,分解后的各個分量失去了本身的物理意義。針對小波變換的局限性,自適應EMD時頻分析方法被應用于行星齒輪箱故障特征提取,去噪及特征提取精度得到一定的改善[9],但存在模態混疊現象以及停止條件缺陷等問題,從而限制了其性能。鄭近德等[10]改進的方法EEMD減少了模態混合問題,但白噪聲的選擇仍然是一個大挑戰。
2014年,Dragomiretskiy等[11]提出了一種新的信號處理方法-變分模態分解(Variational Mode Decomposition,VMD)。該方法是一種新的時頻分析方法,能夠將多分量信號一次性分解成多個單分量調幅調頻信號,避免了迭代過程中遇到的端點效應和虛假分量問題。因此,VMD較EMD、EEMD能有效避免模態混疊、過包絡、欠包絡、邊界效應等問題。近些年來,VMD算法在行星齒輪箱故障診斷中得到廣泛應用[12-16],例如Vikas Sharma[17]用VMD算法通過尋找瞬態的峰值對信號進行分解,成功診斷了不同程度的行星齒輪箱故障。但是該方法也存在著不足,例如VMD的分解模數K和懲罰因子都需要依據經驗設定,若參數選擇不準確,則影響分解性能。
基于時頻域分析的信號處理方法一般存在分辨率受限、模態混疊、依賴研究者豐富的專業知識等問題,不適合普通用戶使用。隨著人工智能的發展,基于深度學習理論的自適應特征提取方法因其所選擇的特征適合于被測信號而成為新的研究熱點。卷積神經網絡由于具有較好的模式識別優勢,被廣泛應用于故障診斷領域,如Chen等[18]為了實現對齒輪退化狀態的監測,提出一種基于奇異譜分解(SSD)與卷積神經網絡(Convolutional Neural Networks,CNN)的齒輪退化狀態識別方法。Qiao等[19]為研究不同噪聲和載荷下軸承故障診斷問題,提出了一種基于卷積神經網絡(CNN)和長短時記憶神經網絡(LSTM)的雙輸入模型。
綜上所述,在對行星齒輪箱進行故障診斷時,關鍵是能夠提取反映被監測對象的特征。本文為了實現行星齒輪箱的自動化診斷,建立自動變分模態分解模型(Automatic Variational Mode Decomposition,A-VMD)對分解后包絡信號中的故障特征信息進行自動化提取,創建更全面的故障特征信息,并與卷積神經網絡相結合建立從特征提取到智能識別的自動化診斷模型,實現行星齒輪箱故障診斷的全程自動化。
1 理論研究
1.1 VMD參數優化算法
分解模數K的取值對信號的分解效果影響較大。因此,本文提出一種基于最優峭度峰值確定分解模數的算法對分解參數K進行全局尋優,進而獲取與實際信號較為匹配的分解模數K。對任意信號自適應確定分解模數K的算法步驟如下。
(1)設定VMD參數中K的搜索范圍。
(2)確定自適應參數。將信號分解后的敏感分量的峭度值ku作為適應度值。對于給定信號x(t),其分解后的峭度值代入下式:

式中:xi為原始信號經Hilbert變換后的包絡。
找出分解后IMF的最大峭度值,即適應度函數為

式中:ku j為分解模數為u時,第j個IMF的峭度值;ku為分解模數為u時的峭度最大值。
(3)求出峭度最大值的峰值。

式中:n為峰值個數。
將峰值pn作為尋優過程中的適應度值,目標是尋得全局最優峰值,從而得到最優分解模數。
(4)保存峭度最大值峰值及其所對應的分解模數k。
(5)根據pn確定K值,當n=0時,說明峭度最大值沒有峰值,故取k=10,當n=1時,最優峰值為p1,同時得到最優分解模數k。
(6)當步驟4所得的k≤3,且n>1時,最優峰值更新為p2,得到分解模數k,更新最優k值。
1.2 基于A-VMD的故障特征提取與創建
A-VMD模型的故障特征提取與創建過程主要分為5個步驟:自適應確定分解模數K、VMD分解、敏感分量選取、包絡譜解調、故障特征向量構建。流程如圖1所示。
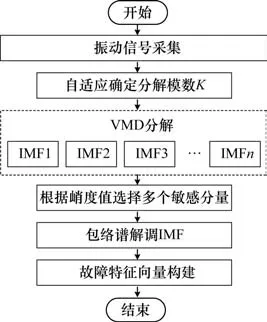
圖1 A-VMD故障特征提取與創建模型
(1)分解模數K的確定:根據所提出的VMD參數優化算法確定分解模數K,并對信號進行自適應分解。
(2)敏感分量的選取:在對行星齒輪箱進行診斷過程中,故障特征提取還需要對VMD分解所得到的敏感分量進行解調分析。常用的解調方法是選擇一個包含最多故障相關成分的敏感子帶進行進一步分析,然而大量存在于其他子帶的故障相關分量被忽略。因此,本文提出根據峭度值選擇故障特征信息明顯的多個敏感分量提取包含部分冗余信息的故障特征。
(3)故障特征向量構建:為了保障卷積網絡輸入的一致性,首先每個敏感分量中均按診斷需求提取n個故障特征頻率的幅值作為特征。同時根據預設的敏感分量冗余度m,每個樣本均提取統一的m×n個故障特征,共同構成故障特征向量。m和n均為網絡訓練前通過分析確定的常量,故障識別過程中無需進行設置。
1.3 卷積神經網絡
卷積神經網絡由于在模式識別上有較大的優勢,已被廣泛應用于故障診斷研究領域。在以往的行星齒輪箱故障診斷識別中,很多學者會截取振動時域圖像或者將分解后的所有敏感分量的全部數據點輸入卷積神經網絡模型中進行訓練。然而,數據截取過多時會導致信息冗余,且數據訓練時間過長;若數據截取過少又不能涵蓋所有信息,導致信息缺失。因此,在保證故障振動信號盡可能豐富的情況下提取數據樣本點成為數據預處理的關鍵。本研究中所提出的A-VMD模型正好解決了此問題,卷積神經網絡網絡一般含有多層,其中,隱含的卷積層與池化層是卷積神經網絡特征提取功能的核心模塊,其結構如圖2所示。圖中,小長形代表特征圖,特征圖存在于卷積神經網絡的每一層中,輸入的特征圖經過卷積濾波器可得到一個特征圖,且每個特征圖含有多個神經元。

圖2 一般CNN結構示意圖
2 基于A-VMD與CNN的故障診斷方法
基于A-VMD和CNN的故障診斷方法如圖3所示。將采集的振動信號通過A-VMD模型提取出具有標準化的特征信息,并將樣本數據分為訓練集和測試集。首先通過訓練樣本CNN網絡進行訓練,并保存訓練好的網絡模型,現場診斷時直接采用訓練好的網絡對A-VMD提取的故障特征向量進行分類。
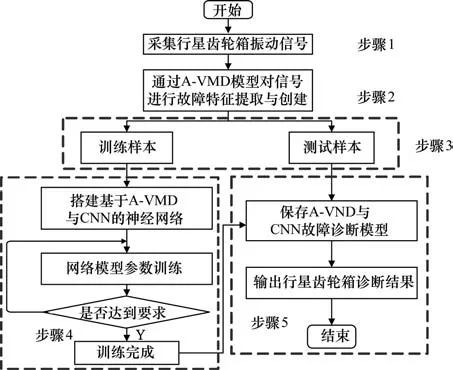
圖3 基于A-VMD和CNN的故障診斷流程
2.1 基于A-VMD和CNN的網絡結構
在行星齒輪箱故障診斷識別中,保證故障振動信號盡可能豐富的情況下提取數據樣本點成為數據預處理的關鍵。A-VMD模型將原始振動信號進行預處理,提取出盡量豐富的故障特征信息再輸入網絡中進行訓練,大大減少了訓練時間。如圖4所示為A-VMD和CNN的網絡結構圖。圖中,振動信號經過參數自適應的VMD算法分解后,選取多分量進行故障特征提取,將提取后的故障特征向量進行重構,產生樣本數據,然后通過卷積神經網絡的輸入層輸入,經過兩層池化層和卷積層對特征進行提取,最后由平均池化層和Softmax完成對故障類型和故障程度的分類。
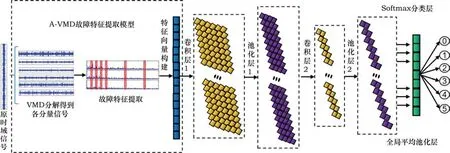
圖4 A-VMD和CNN網絡結構
2.2 訓練網絡模型
通過A-VMD模型獲取故障特征點以生成樣本數據后,從全部訓練樣本數據中抽取一部分數據進行網絡模型的訓練,使網絡的輸出值逐步逼近真實值,每進行一次訓練便更新網絡模型的偏置以及權重,直到網絡參數的誤差達到預先設定的迭代次數。結束訓練后,網絡的結構、參數以及訓練時的超參數即為訓練的結果,有了這些結果便可依據相應的行星齒輪箱振動信號的情況預測出行星齒輪箱的故障狀態。根據故障類型搭建的網絡模型的各層類別,維度和參數數目如表1所示。
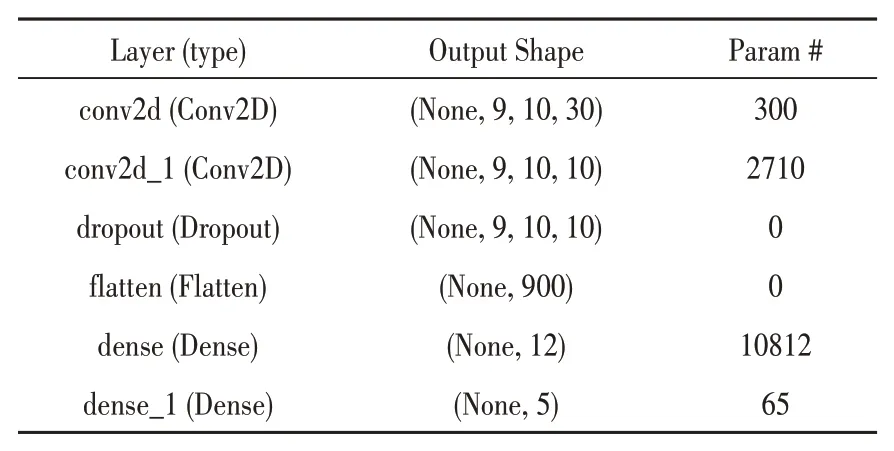
表1 故障分類網絡模型參數
3 實驗及結果分析
3.1 實驗平臺
為了驗證所提出的行星齒輪箱故障診斷方法在平穩工況下的有效性,本研究采用了SpectraQuest行星齒輪箱故障綜合實驗平臺進行了實驗,如圖5所示。

圖5 行星齒輪箱故障綜合實驗平臺
試驗臺由變速驅動電機、扭力傳感器和編碼器、一級行星齒輪箱、平行軸齒輪箱、磁粉制動器、變頻驅動控制器、負載控制器和數據采集箱組成。行星齒輪箱輸入軸的轉速由轉速表測量,振動信號由安裝在行星齒輪箱上的加速度傳感器測量。行星變速箱參數如表2所示。

表2 行星齒輪箱參數
在實驗中,為了模擬行星齒輪箱各種工作狀態,采集4種不同損傷情況下太陽齒輪的振動信號數據。4種損傷狀態分別為齒根裂紋、齒面磨損、斷齒、齒面剝落,如圖6所示。電機輸入軸轉速固定為1 800 r/min,磁粉制動器的負載固定為25.6 N·m,采樣頻率設置為12 800 Hz。其中每個樣本的采樣時間為2 s,樣本時域信號采樣點共25 600個。
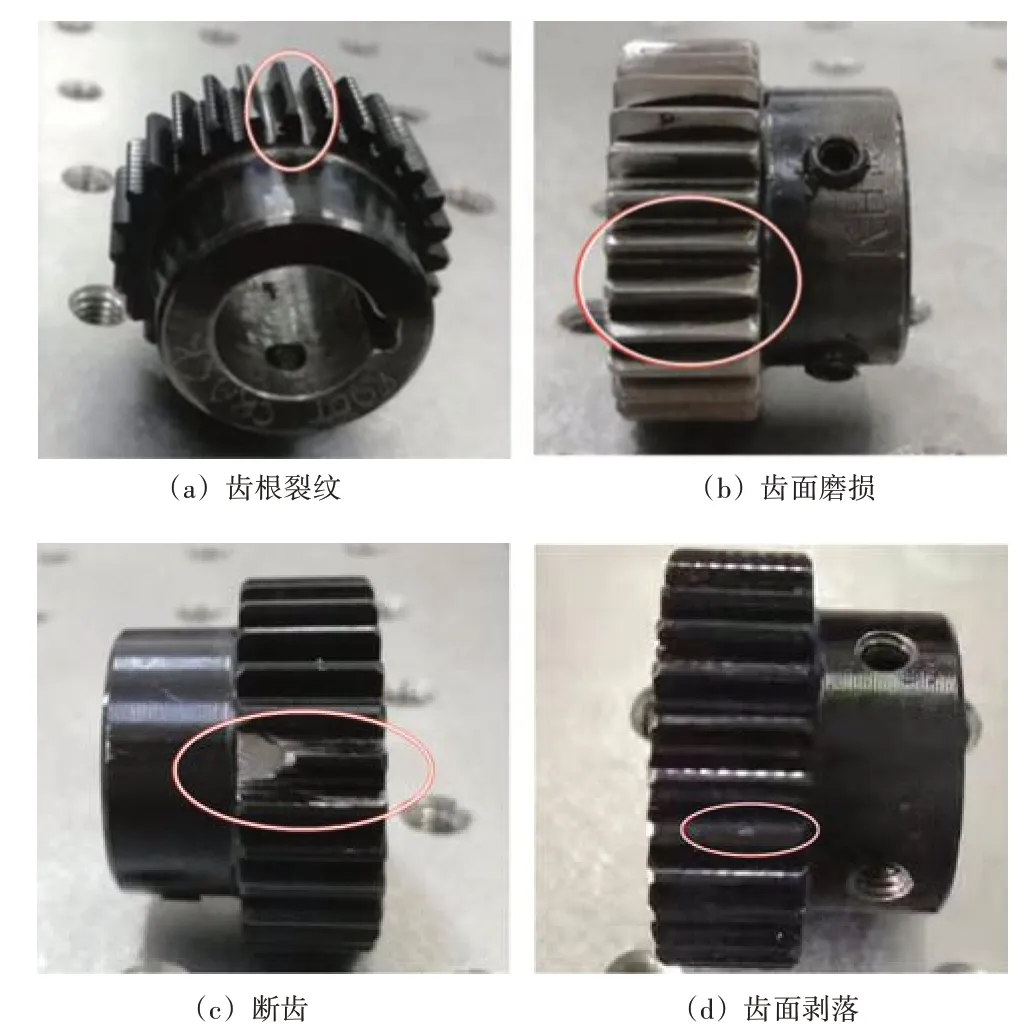
圖6 太陽輪故障類型
3.2 診斷結果及分析
通過對所提故障診斷模型對齒輪不同故障類型以及不同故障程度的數據集進行多次重復測試。故障分類模型中,采用準確率、誤報率和漏報率對模型診斷結果進行評估,如表3所示。
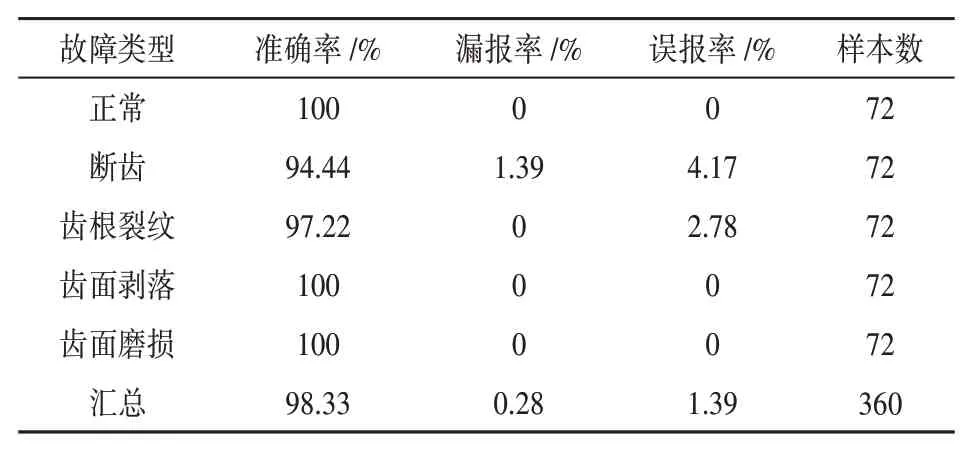
表3 A-VMD和CNN模型故障類型診斷結果評估
為了對本文所提故障診斷模型的測試結果進行更為詳細地分析,本文引入混淆矩陣對診斷結果進行定量分析。通過混淆矩陣可得到該齒輪類型的確診、誤判的具體情況。圖7所示為平穩工況下齒輪故障分類混淆矩陣,每一類故障樣本個數為72個。從圖中可以得到,該模型對該數據集的綜合識別率高98.33%,其中,對正常與故障的識別率為99.72%,對斷齒故障的識別準確率為94.44%,對齒面磨損故障和齒面剝落故障識別率為100%。斷齒故障中有1個漏判為正常齒輪,有3個被誤判齒根裂紋故障。由此可以看出,該模型識別準確率較高。
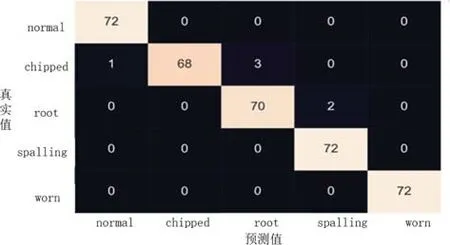
圖7 齒輪診斷多類型故障混淆矩陣
4 結束語
(1)針對行星齒輪箱診斷過程中,VMD分解的參數設置對診斷結果影響較大的問題,提出了一種基于峭度峰值的參數自適應尋優算法確定K值,并結合峭度選擇多個敏感分量提取故障特征的自動化診斷方法A-VMD;A-VMD不僅實現了參數設置的自適應處理,還獲取了更加全面的故障特征信息。
(2)通過A-VMD模型提取并創建包含部分冗余信息標準化故障特征向量,不僅提取了更加全面的故障特征信息,創建了結構一致的特征向量數據集,且更加方便與神經網絡的結合。
(3)將不同故障類型的齒輪故障數據輸入A-VMD和CNN診斷模型中進行自動化識別。實驗結果表明,通過A-VMD和CNN診斷模型能夠充分發揮VMD和CNN的優勢,實現了無需人工干預診斷便可以對行星齒輪箱進行自動化智能診斷,且對太陽輪典型故障的識別率能達到98.33%。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
