變均方根隨機(jī)振動-變加速度離心復(fù)合試驗
2022-08-31 09:12:18李明海
航天器環(huán)境工程 2022年4期
康 甜,歐 峰,嚴(yán) 俠,李明海
(中國工程物理研究院 總體工程研究所,綿陽 621999)
0 引言
飛行器再入飛行時,氣動力會誘發(fā)強(qiáng)烈的振動和過載環(huán)境,對飛行器的結(jié)構(gòu)完整性和功能有效性構(gòu)成嚴(yán)峻挑戰(zhàn)。為實現(xiàn)對飛行器的全動作流程考核,復(fù)現(xiàn)飛行力學(xué)環(huán)境效應(yīng),需要在地面試驗中盡量真實地模擬再入飛行過載及振動力學(xué)環(huán)境的復(fù)合特性和時變特性。
當(dāng)前,地面試驗中的飛行過載-振動環(huán)境復(fù)合模擬主要有振動-離心復(fù)合試驗和火箭橇試驗2 種手段。美國Sandia 國家實驗室從20 世紀(jì)70 年代以來,持續(xù)提升其振動-離心復(fù)合試驗?zāi)芰Γ?yīng)用于洲際彈道導(dǎo)彈中彈道敏感組件、引信以及彈頭的復(fù)合環(huán)境試驗考核。我國的振動-離心復(fù)合試驗技術(shù)發(fā)展較晚,2014 年才形成了可以模擬飛行力學(xué)環(huán)境的加速度-高頻振動復(fù)合環(huán)境試驗系統(tǒng),并陸續(xù)開展了多類產(chǎn)品的過載-振動復(fù)合環(huán)境試驗研究。上述試驗研究均為恒定/緩變過載或穩(wěn)態(tài)振動的復(fù)合,沒有同時模擬兩類飛行力學(xué)環(huán)境的時變特性。在火箭橇試驗的飛行過載-振動復(fù)合模擬方面,以過載的時變特性模擬為主,沒有要求振動模擬與飛行環(huán)境特性一致。
過載和振動環(huán)境時變特性的同時模擬需要有具備相應(yīng)加載控制功能的試驗設(shè)備和與之匹配的試驗條件設(shè)計方法:試驗設(shè)備的關(guān)鍵是解決激振裝置適應(yīng)動態(tài)離心場的問題;試驗條件設(shè)計的關(guān)鍵則是提取出試驗設(shè)備可模擬的、具有考核意義的時變特征量。
本文利用中國工程物理研究院總體工程研究所自行研制的具備過載、振動時變特性同時模擬功能的飛行過載-振動一體化動態(tài)模擬試驗系統(tǒng),開展再入飛行器子系統(tǒng)的變均方根隨機(jī)振動-變加速度離心復(fù)合試驗條件設(shè)計研究,以及復(fù)合試驗控制驗證。
1 再入飛行過載-振動力學(xué)環(huán)境
如圖1 所示,某再入飛行器中包含2 個結(jié)構(gòu)上相互獨立但功能上相互關(guān)聯(lián)的子系統(tǒng),其功能動作由其中的過載環(huán)境敏感組件感知沿再入方向產(chǎn)生的軸向過載環(huán)境進(jìn)行觸發(fā)。為了實現(xiàn)2 個子系統(tǒng)的全動作流程考核、真實還原再入飛行過程中的潛在失效模式,需要按實際飛行環(huán)境同時模擬再入過程中軸向過載和軸向振動的時變歷程。
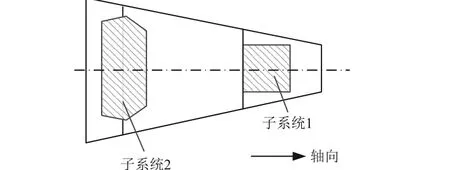
圖1 某再入飛行器子系統(tǒng)示意Fig. 1 Illustration of concerned re-entry vehicle subsystem configuration
圖2 和圖3 分別為某次飛行試驗中2 個子系統(tǒng)的軸向過載和軸向振動環(huán)境,圖中的橫、縱坐標(biāo)均進(jìn)行了歸一化處理(下同)。圖2 所示為飛行器質(zhì)心處的軸向加速度隨時間的變化,飛行器無擺動則2 個子系統(tǒng)的軸向加速度與質(zhì)心處相同。圖3 所示為2 個子系統(tǒng)安裝位置測點振動響應(yīng)的總均方根加速度隨時間的變化,對應(yīng)的頻率范圍為9~2240 Hz。
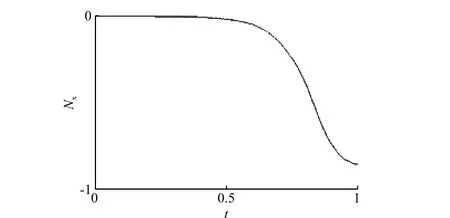
圖2 再入段軸向過載環(huán)境Fig. 2 Axial inertial acceleration during re-entry
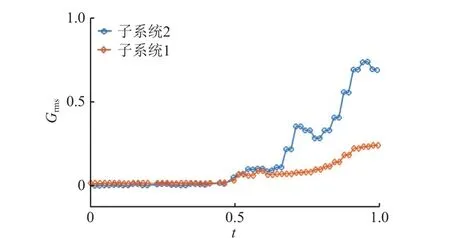
圖3 再入段軸向振動環(huán)境Fig. 3 Axial random vibration during re-entry
本文以再現(xiàn)圖2、圖3 所示的過載、振動歷程為目標(biāo),開展變均方根隨機(jī)振動-變加速度離心復(fù)合試驗研究。
2 變加速度離心試驗條件設(shè)計
再入飛行器主要受軸向過載環(huán)境作用,要模擬的變加速度過程的附加切向加速度量值較小且不影響試驗?zāi)康模虼丝梢圆贿M(jìn)行試件的多軸旋轉(zhuǎn)控制,僅通過控制離心機(jī)轉(zhuǎn)臂的轉(zhuǎn)速來實現(xiàn)軸向加速度量值的變化,以降低試驗系統(tǒng)的復(fù)雜程度。
變加速度離心用加速度序列進(jìn)行描述,包含時刻和對應(yīng)的加速度值。變加速度離心試驗條件設(shè)計中的核心內(nèi)容是確定加速度序列。本文利用圖2 所示再入段軸向過載數(shù)據(jù)進(jìn)行變加速度離心試驗條件設(shè)計。先對軸向過載數(shù)據(jù)進(jìn)行5 點滑動平均的平滑處理,以消除不影響試驗?zāi)康那曳容^小的過載值波動。彈道數(shù)據(jù)的時間間隔為10 ms,相當(dāng)于進(jìn)行了上限頻率為20 Hz 的低通濾波。低通濾波的上限頻率是根據(jù)過載變化率確定的——過載變化率越大,則濾波的上限頻率越高。應(yīng)用低通濾波算法時須注意保持相位不變。
對平滑后的過載數(shù)據(jù)進(jìn)行重采樣,以增大試驗條件中加速度序列的時間間隔,減少評判數(shù)據(jù)量。重采樣時以兩點間數(shù)據(jù)能夠按線性插值進(jìn)行恢復(fù)為前提,不是嚴(yán)格的等間隔采樣。線性擬合的殘差在控制容差的10%以內(nèi)則不會影響實際加載控制的效果。
圖4 給出所設(shè)計試驗條件和實際過載的對比:在圖示尺度下,試驗條件的加速度序列與實際過載值完全重合,從過載變化率的對比可以看出平滑和重采樣的處理效果。圖5 為試驗條件的局部放大,可以看出試驗條件消除了小幅波動。
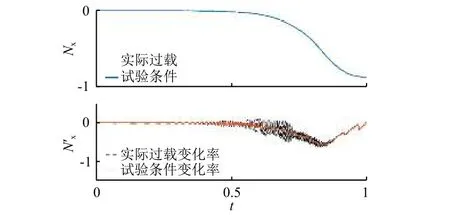
圖4 變加速度離心試驗條件與實際過載的對比Fig. 4 Comparison between the variable centrifugal acceleration test condition and the real acceleration load
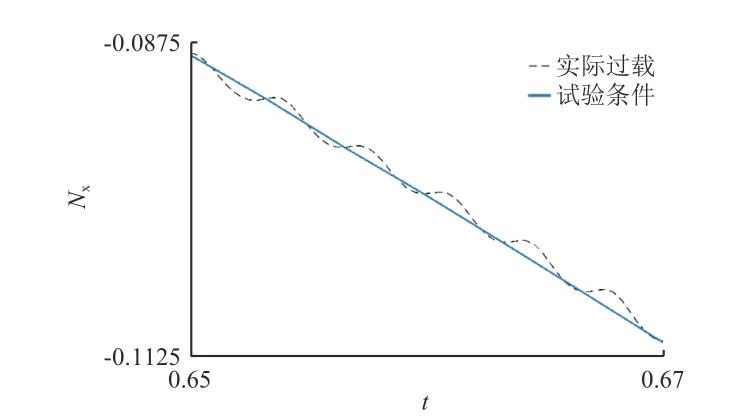
圖5 試驗條件的平滑處理Fig. 5 Smoothing of the test condition
3 變均方根隨機(jī)振動試驗條件設(shè)計
對振動環(huán)境時變特性的模擬,目前應(yīng)用較多的是時域波形再現(xiàn)技術(shù),但需要有實測的加速度時域數(shù)據(jù)。而此次飛行試驗中受到遙測帶寬的限制,地面接收到的振動測試數(shù)據(jù)是經(jīng)過彈上預(yù)處理的頻譜數(shù)據(jù),不具備進(jìn)行時域波形再現(xiàn)的前提條件。
頻域的非平穩(wěn)隨機(jī)振動模擬可以通過調(diào)制實現(xiàn)均方根值時變的非平穩(wěn)過程。為了能夠模擬實際振動的均方根加速度變化歷程,本文根據(jù)非平穩(wěn)隨機(jī)振動的調(diào)制思想,采用變均方根隨機(jī)振動進(jìn)行模擬:在常規(guī)隨機(jī)振動的基礎(chǔ)上,將均方根加速度作為控制的“增益”;在保證控制譜頻率特性不變的情況下,控制總均方根加速度隨時間變化。這是頻域控制方法實現(xiàn)非平穩(wěn)隨機(jī)振動的一種簡化方式。
變均方根隨機(jī)振動采用歸一化頻譜和均方根加速度序列來進(jìn)行描述。歸一化頻譜是加速度功率譜密度按總均方根加速度進(jìn)行歸一化后的表征,積分值為1。均方根加速度序列由分段時間點和總均方根加速度組成。變均方根隨機(jī)振動試驗條件設(shè)計的核心內(nèi)容是確定歸一化頻譜和均方根加速度序列。
本文利用圖3 所示的實測振動數(shù)據(jù)進(jìn)行變均方根隨機(jī)振動試驗條件設(shè)計。實測振動數(shù)據(jù)是經(jīng)過1/3 倍頻程預(yù)處理的頻段內(nèi)均方根加速度,下限頻率為9 Hz。而低頻振動測量會受到動態(tài)變化的過載環(huán)境的影響,故在開展動態(tài)離心-振動復(fù)合試驗時,不需要模擬這部分的低頻振動;選取中心頻率80 Hz 以上的頻段,計算出每幀數(shù)據(jù)頻段內(nèi)的平均加速度功率譜密度作為試驗條件設(shè)計的輸入,在雙對數(shù)坐標(biāo)下功率譜密度分布情況如圖6 和圖7所示,圖中時間為歸一化坐標(biāo)。
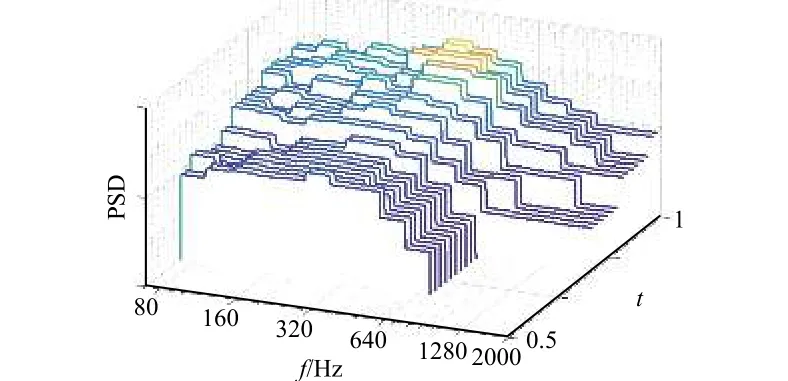
圖6 子系統(tǒng)1 實測振動PSD 譜Fig. 6 The measured vibration PSD of subsystem 1 in flight
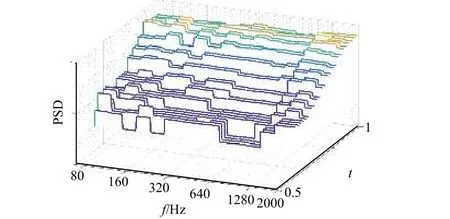
圖7 子系統(tǒng)2 實測振動PSD 譜Fig. 7 The measured vibration PSD of subsystem 2 in flight
再入段前期振動量值小,測試數(shù)據(jù)主要為測量系統(tǒng)本底噪聲,因此選取再入段后期信噪比達(dá)到2以上的測試數(shù)據(jù)來設(shè)計試驗條件。
分段時間與遙測數(shù)據(jù)幀的時間長度保持一致。對每一幀頻譜數(shù)據(jù)按式(1)進(jìn)行歸一化處理并提取出試驗頻率范圍內(nèi)的總均方根加速度。以各幀的總均方根加速度作為加權(quán)因子,按式(2)對各幀歸一化功率譜密度進(jìn)行加權(quán)平均,將加權(quán)平均后的譜作為試驗條件中的歸一化頻譜。
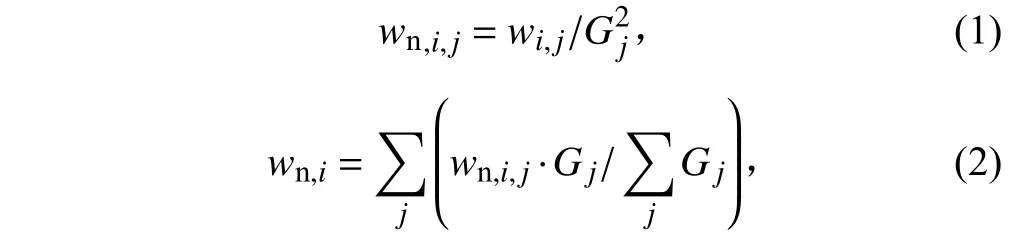
式中:為第幀、第個頻段內(nèi)的實測數(shù)據(jù)歸一化功率譜密度,Hz;G為第幀的總均方根加速度,;為融合后,第個頻段內(nèi)的歸一化功率譜密度,Hz。
圖8 和圖9 分別為利用子系統(tǒng)1 和子系統(tǒng)2 的振動測試數(shù)據(jù)處理得到的變均方根隨機(jī)振動試驗條件,其與實際振動環(huán)境的差異主要來源于試驗條件未包含中心頻率80 Hz 以下頻段。圖8、圖9 中均方根加速度和時間為歸一化坐標(biāo)。
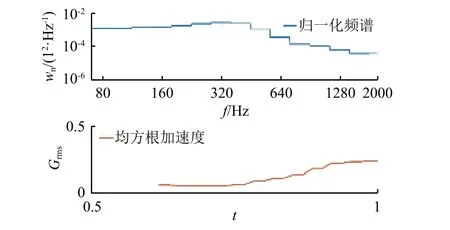
圖8 子系統(tǒng)1 變均方根隨機(jī)振動試驗條件Fig. 8 Variable RMS random vibration test condition of subsystem 1
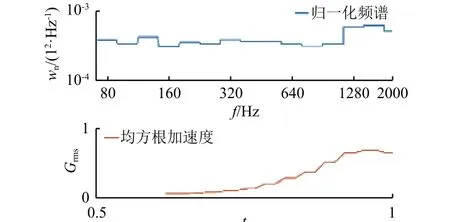
圖9 子系統(tǒng)2 變均方根隨機(jī)振動試驗條件Fig. 9 Variable RMS random vibration test condition of subsystem 2
4 再入飛行器子系統(tǒng)復(fù)合試驗
4.1 試驗系統(tǒng)
飛行過載-振動一體化動態(tài)模擬試驗系統(tǒng)如圖10 所示,主要由GLJ-3R 三軸動態(tài)離心機(jī)、適應(yīng)動態(tài)離心場的寬頻激振裝置以及時域振動控制系統(tǒng)等組成。該試驗系統(tǒng)可實現(xiàn)50 kg 負(fù)載在15/s過載變化率下復(fù)合加載的隨機(jī)振動均方根加速度達(dá)到6,具備波形再現(xiàn)和變均方根隨機(jī)振動控制功能。試驗對象在試驗系統(tǒng)中的安裝參見圖10,振動測點位于2 個子系統(tǒng)的安裝連接螺栓附近,振動加速度測量采樣頻率16.4 kHz;過載測點位于吊艙機(jī)械結(jié)構(gòu)上,離心加速度測量采樣頻率10 kHz。
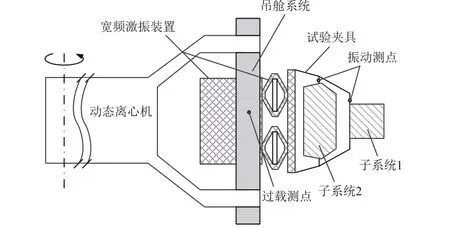
圖10 飛行過載-振動一體化動態(tài)模擬試驗系統(tǒng)和試驗對象Fig. 10 The test system and the test items for the integrated dynamic simulation of flight overload and vibration
4.2 試驗過程
采用圖4 和圖8 所示試驗條件作為復(fù)合試驗的加載條件。離心加載以子系統(tǒng)1 中的過載敏感組件位置為控制基準(zhǔn);振動加載以子系統(tǒng)1 安裝位置為控制基準(zhǔn),通過試驗夾具設(shè)計使得子系統(tǒng)2 安裝位置的振動響應(yīng)達(dá)到試驗條件要求。振動加載是在離心機(jī)靜止?fàn)顟B(tài)下通過反饋控制獲得合適的驅(qū)動曲線后,當(dāng)離心加載達(dá)到規(guī)定量值時,通過開環(huán)控制直接輸出驅(qū)動實現(xiàn)的。由于振動條件的起始值不為0,在試驗規(guī)定的起始時間之前增加了4 幀的時間來實現(xiàn)起振和平穩(wěn)過渡,過渡段加載量值不超過試驗起始值即可。
4.3 數(shù)據(jù)處理
由于離心控制基準(zhǔn)位置與離心加速度測點位置的旋轉(zhuǎn)半徑不同,離心加速度測試結(jié)果按

進(jìn)行修正。式中:為控制點的離心加速度;為過載測點加速度;為過載測點的等效旋轉(zhuǎn)半徑;為控制點的等效旋轉(zhuǎn)半徑。修正后的數(shù)據(jù)首先進(jìn)行上限頻率為20 Hz 的二階巴特沃斯濾波處理,然后以離心加速度最大值時刻為標(biāo)志與試驗條件時間進(jìn)行對齊,再按試驗條件規(guī)定的時刻點進(jìn)行數(shù)據(jù)抽取,計算出各時刻點上的相對偏差。
振動加速度測試結(jié)果以振動加載結(jié)束時刻為標(biāo)志與試驗條件時間進(jìn)行對齊,按試驗條件規(guī)定的分段時間劃分?jǐn)?shù)據(jù)幀,對每幀數(shù)據(jù)進(jìn)行自功率譜分析,再按試驗頻率范圍計算出每一幀的均方根加速度值。
4.4 試驗結(jié)果
采用相同試驗條件重復(fù)進(jìn)行3 次試驗,實現(xiàn)了振動歷程和過載歷程的同時模擬。離心加速度控制點的試驗數(shù)據(jù)處理結(jié)果見圖11;振動加速度控制點的試驗數(shù)據(jù)處理結(jié)果見圖12。可以看到:整個試驗時間段內(nèi)離心加速度與試驗條件相比,最大偏差未超過±1%。在試驗條件規(guī)定的振動加載時間段內(nèi),振動量值較小時,正偏差較大;振動量值增大后,偏差減小,均在±3 dB 以內(nèi)。分析原因認(rèn)為,在試驗條件規(guī)定的加載時間之前,離心機(jī)工作的電氣環(huán)境使得測量數(shù)據(jù)存在較大的本底噪聲,而振動加載又是按照離心機(jī)靜止?fàn)顟B(tài)下的驅(qū)動實施開環(huán)控制的,故而影響了低量值振動控制的測試結(jié)果。
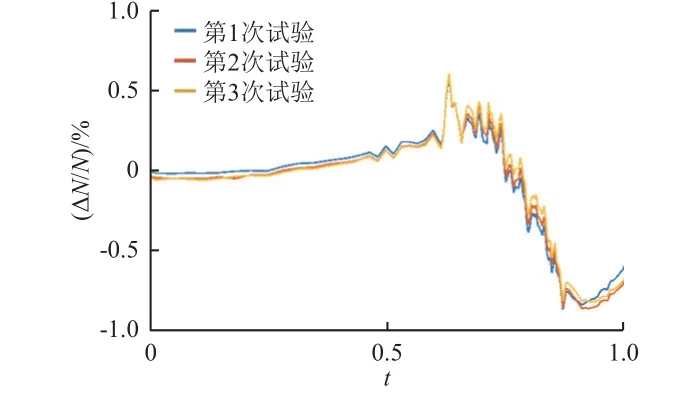
圖11 復(fù)合試驗中的離心加速度偏差Fig. 11 Centrifugal acceleration deviation in the combined test
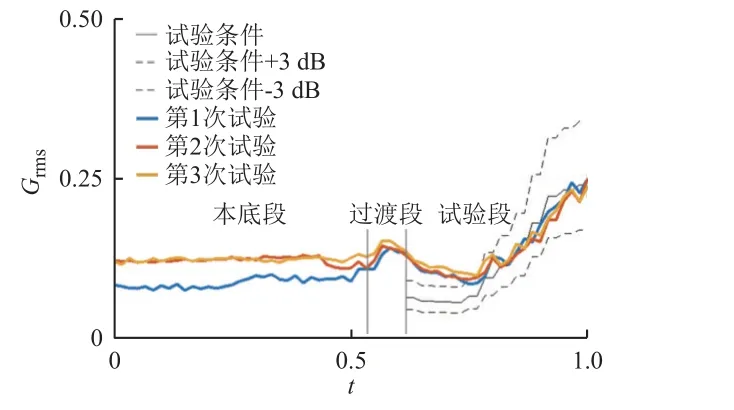
圖12 復(fù)合試驗中的隨機(jī)振動均方根加速度Fig. 12 RMS acceleration of random vibration in the combined test
5 結(jié)束語
本文研究提出了一種變均方根隨機(jī)振動-變加速度離心復(fù)合試驗的試驗條件設(shè)計方法,開展了再入飛行器子系統(tǒng)的復(fù)合試驗驗證,實現(xiàn)了在地面試驗中對飛行過載和振動變化歷程的同時模擬。這種試驗方法對飛行器中慣性儀表等振動過載環(huán)境敏感組件的性能驗證、誤差修正建模等具有重要意義。后續(xù)還需開展三向動態(tài)過載與振動環(huán)境復(fù)合模擬的方法研究,以進(jìn)一步提高地面試驗中飛行力學(xué)環(huán)境模擬的真實性。
