基于人機耦合的下肢外骨骼機器人動力學仿真與樣機試驗
2022-08-31 03:46:54劉建輝駱祎嵐白云峰朱世根
制造業自動化 2022年7期
劉建輝,駱祎嵐,白云峰,丁 浩,朱世根
(東華大學 機械工程學院,上海 201620)
0 引言
下肢外骨骼助力機器人作為一種可穿戴性動力裝置,結合了人體的智慧與機器的“體力”[1],外骨骼機器人在軍事、醫療等領域發揮著非常重要的作用,能夠提高人體肌能完成各類極限活動到輔助恢復運動能力[2,3],有著廣泛應用前景。
外骨骼助力機器人的研究始于20世紀60年代[4],主要集中在美國以及日本,如美國加州伯克利研制的下肢外骨骼機器人“BLEEX”、洛克希德·馬丁公司研制的“HULC”,日本筑波大學研制的“HAL”外骨骼機器人[5~7]。國內對于下肢康復外骨骼研究起步較晚,但也取得了一定的成果,如中科院研發的康復下肢外骨骼機器人[8],電子科技大學研發的下肢助力外骨骼等[9],此外,哈爾濱工業大學、浙江大學等高校也在外骨骼領域開展了許多研究[10]。近年來,我國經濟發展迅速,也伴隨著人口老齡化日趨嚴重的問題,給社會帶來了嚴重的負擔[11],目前國內康復類外骨骼機器人結構復雜且價格昂貴。
由于國內下肢外骨骼人機耦合方面的研究并非十分常見,本文針對下肢殘障人群設計了一款結構簡單,舒適度高的康復型下肢外骨骼機器人,通過理論與實驗結合的方式研究人機耦合過程中動態受力情況和外骨骼自身結構特性來提高康復訓練的效果。
1 下肢外骨骼結構設計
外骨骼的設計需要根據人體行走方式以及人體骨骼的構型進行設計,需要滿足不同身高的人群要求且不能影響人正常運動。因此,外骨骼設計的可擴展性以及舒適性至關重要。
1.1 整體結構設計
所設計外骨骼機器人一共由10個自由度,每條腿5個自由度,髖關節2個自由度、膝關節1個自由度、踝關節2個自由度,外骨骼機器人的整體結構圖如圖1所示。

圖1 下肢外骨骼結構示意
該下肢外骨骼機器人由動力源、背板架、腰部伸縮裝置、大腿伸縮裝置、小腿伸縮裝置、髖關節、膝關節、踝關節以及大小腿連桿以及各關節驅動裝置組成。背夾板所帶的動力源為整個系統提供動力來源,各關節電機為各個關節提供驅動力,大腿小腿伸縮裝置保證不同身高的人體都能穿戴。
1.2 各關節結構設計
1.2.1 髖關節結構設計
髖關節結構類似球關節,對于人體平穩運動的實現至關重要,在保證髖關節功能的前提下可以簡化為屈-伸、外展-內收兩個方向上的運動。其中屈-伸在行走運動中起主要作用,因此設計一個主動驅動關節來實現下肢外骨骼的屈-伸運動。
關節動力裝置由電機與諧波減速器構成,并通過機械限位裝置限制電機的轉動角度以保護穿戴者的髖關節。擺動轉向機構實現外展-內收運動。外展-內收主要起輔助作用,因此不添加主動驅動,設計髖關節詳細結構如圖2所示。

圖2 髖關節結構示意
1.2.2 膝關節結構設計
膝關節簡化后可以看做一個單軸關節,形狀類似于機械上的轉動副,其結構如圖3所示。下肢外骨骼機器人膝關節主要運動為屈-伸運動,內旋-外旋動作比較微小,可以忽略不記,因此使用主動電機驅動與旋轉運動副來實現膝關節的屈-伸運動。機械限位裝置與髖關節相似,通過限制膝關節轉動范圍,對穿戴者起保護作用。

圖3 膝關節結構示意
1.2.3 踝關節結構設計
踝關節功能結構同髖關節相似,也為球關節,由于踝關節內旋-外旋動作運動范圍微小,故只設置2個自由度,且均為被動自由度,結構如圖4所示。步行過程中,主要由屈伸轉向機構實現跖屈-背屈運動,內外翻轉機構通過踝關節連接件實現內翻-外翻運動,踝關節連接件在實現內外翻轉運動時需承受較大沖擊力,因此在設計中,對連接件完成加厚處理。

圖4 踝關節結構示意
1.2.4 人-外骨骼固定機構設計
為了保證穿戴者的舒適性,設計一款新型可調節鎖扣綁帶結構,如圖5所示。綁帶通過固定裝置與腿部連桿相連接,確保工作時不產生滑移與偏轉。因不同人群腿圍不同,在綁帶中心處設計了一種伸縮調節鎖扣以滿足不同穿戴者需要。由于人體在行走時腿部肌肉會產生一定張力,本設計對綁帶內側設計多層波紋形狀的柔性防滑涂層,保護運動過程中各關節不因大劇烈動作而受損傷。

圖5 綁帶結構示意
2 外骨骼機器人動力學仿真
2.1 仿真模型的建立
首先利用SolidWorks軟件建立了三維模型,并同時構建人體模型,將人與外骨骼模型裝配好導入ADAMS中,完成人機模型虛擬樣機的建立。
在ADAMS軟件中對導入的虛擬樣機的每個零件按照外骨骼實際設計材料的屬性進行編輯定義,并設置重力的方向,基本設置完成后,下肢外骨骼的人機耦合虛擬樣機模型如圖6所示。

圖6 外骨骼機器人ADAMS模型
2.2 仿真條件與約束的設置
由于本文中的虛擬樣機采用外骨骼帶動人的運動方式,具體約束如表1所示,表1為單腿約束表,所以在人體上建立6個轉動副,分別為左右大腿的髖關節、膝關節、踝關節各1個轉動副,人體的腳與外骨骼足底板簡化為固定副連接,外骨骼各個關節也分別建立1個轉動副,外骨骼機器人一共6個轉動副,人的大腿和外骨骼的大腿連接是通過綁帶接觸。整個工作過程是外骨骼動力源給各關節提供動力,各關節的轉動同綁帶帶動人體肢體的運動。

表1 下肢外骨骼約束
完成仿真約束的設置接下來需要設置添加仿真驅動和參數,通過模擬外骨骼帶動人的運動過程,為各關節驅動設置的參數如表2所示。

表2 各關節驅動函數
完成仿真約束與驅動參數的設置,開始仿真,通過ADAMS后處理模塊可以得到外骨 各個關節的力矩以及人機接觸力等。
2.3 仿真結果分析
2.3.1 各關節力矩分析
圖7為下肢外骨骼右腿髖關節,膝關節,踝關節的關節力矩曲線,joint-6,joint-5,joint-11分別為髖關節,膝關節和踝關節的力矩曲線,髖關節的最大力矩為24N·m,膝關節的最大力矩為20N·m,踝關節最大力矩為4N·m,力矩在1秒處發生了較大的變化,是由于在仿真的時候Step函數會導致力矩發生較大的變化。在1s~2s處,該階段為腿的擺動狀態,該階段內力矩變化平穩。

圖7 關節力矩曲線
2.3.2 人-外骨骼協同性分析
人與外骨骼行走的步態圖如圖8所示,觀察人與外骨骼的行走的步態圖可以看出,外骨骼帶動人行走的步態平穩,沒有發生滑倒、偏移等現象。

圖8 人機模型樣機聯合行走圖
為了進一步分析人機耦合過程中,人與外骨骼跟隨性,通過仿真得到人隨著外骨骼運動的大腿和小腿質心的變化曲線圖,如圖9所示。

圖9 人體和外骨骼左右大腿質心速度變化曲線
由圖9可知,人和外骨骼左右大腿的質心曲線99%都是重合的,在質心達到單個步態的最高點時,即人體抬腿到最高處,此時有1%的偏差;同理圖10中,小腿質心曲線與外骨骼質心曲線的重合度較大腿稍低一點。由此可知,人體與外骨骼人機協同性能非常好,能夠保證外骨骼與人體行走時各關節的同步性。
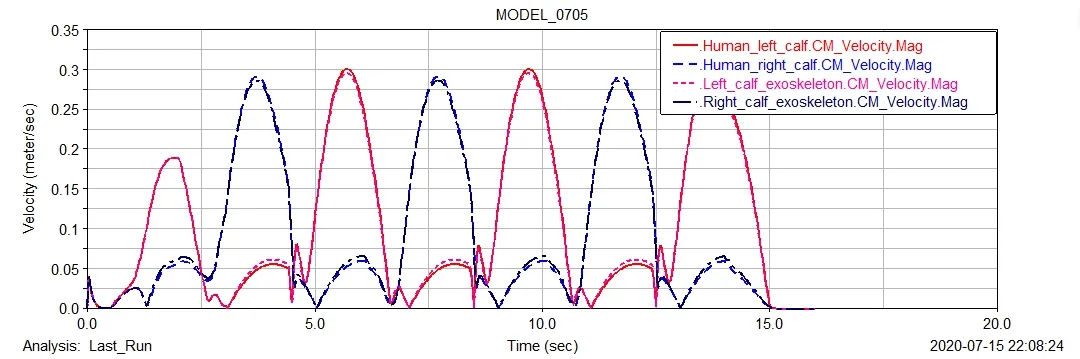
圖10 人體和外骨骼左右小腿質心速度變化曲線
2.3.3 人-外骨骼的接觸力分析
外骨骼與人的接觸力影響著人行走時的舒適度以及人運動的穩定性,大腿與綁帶接觸力和小腿綁帶接觸力如圖11所示。
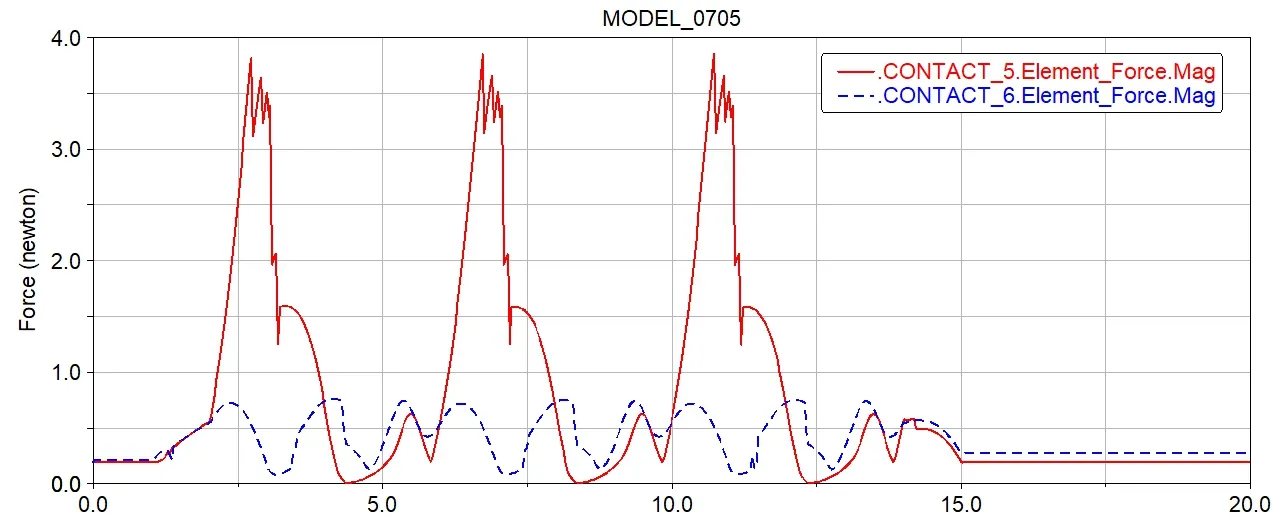
圖11 大腿綁帶接觸力
圖11為大腿綁帶接觸力與小腿綁帶接觸力,由圖contact_5和contact_6分別表示的大腿與小腿與綁帶接觸力可知,大腿綁帶接觸力大小范圍為0N~3.8N,小腿綁帶接觸力大小范圍為0N~0.7N,驅動大腿所需要的力比小腿要大4~5倍,符合正常人體運動情況,在圖中3s左右處,接觸力達到最大值,此處為大腿處到達最高點,在此處,出現了力矩輕微的波動,是由于在行走過程中,此時綁帶與人體有一定的滑移,屬于正常現象,整個行走過程中,力矩沒有出現突變,表明外骨骼帶動人的過程安全平穩。
圖12為人在行走過程中的足底與足底板的接觸力,該圖很好的反應了人-外骨骼行走的步態,接觸為0的地方表示,該腳處于擺動相的位置,為最大值表示為支撐相,左右腿支撐相和擺動相占比為1:1,且整個運動過程中,力矩變化規律,說明人體行走的速度較為均衡,且穩定。

圖12 足底接觸力
通過以上動力學仿真分析,可以得出該下肢外骨骼機器人整體結構設計合理,能夠滿足基本的康復訓練要求,但是仍然存在以下缺陷:外骨骼的結構與人體的模型全為剛性結構,在正常情況下人體有著彈性和緩沖性,后續可以進一步對人體進行柔性化處理。
3 下肢外骨骼樣機試驗
3.1 試驗目的與方法
為了研究下肢外骨骼機器人人機耦合的特性,研制了下肢外骨骼機器人物理樣機,進行了人-外骨骼平地行走試驗分析,圖13為人-外骨骼試驗模型。

圖13 人-外骨骼試驗模型
根據仿真規劃的步態進行人-外骨骼的平地行走試驗,試驗過程中行走姿態圖如下圖14所示,在試驗過程中,通過MPU6050姿態傳感器與力傳感器采集人-外骨骼膝關節的角度變化曲線圖,以及人-外骨骼大腿接觸力曲線變化圖。

圖14 人-外骨骼平地行走姿態圖
3.2 試驗結果及分析
1)人-外骨骼行走過程中關節角速度分析
圖15為人-外骨骼平地行走試驗中人體與外骨骼的膝關節角度變化曲線圖,圖中灰色和紅色曲線分別表示人體和外骨骼膝關節變化曲線。
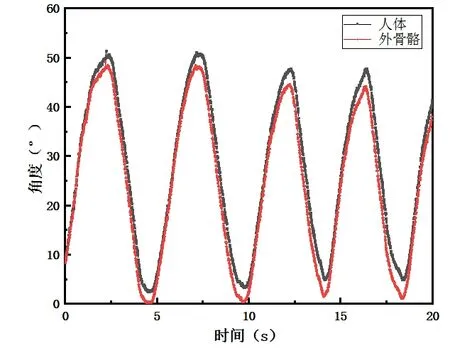
圖15 外骨骼與人體膝關節角度對比
從該曲線可知,人的膝關節運動較外骨骼相對滯后,這是由于外骨骼在帶動人運動的過程中,存在有一定的響應時間;在整個運動過程中,人體和外骨骼關節曲線光滑,證明人-外骨骼的協同運動穩定性能較好,人與外骨骼的運動能保持95%的同步性。
2)人-外骨骼大腿接觸力分析
圖16為試驗過程中右肢大腿與外骨骼接觸力曲線圖。
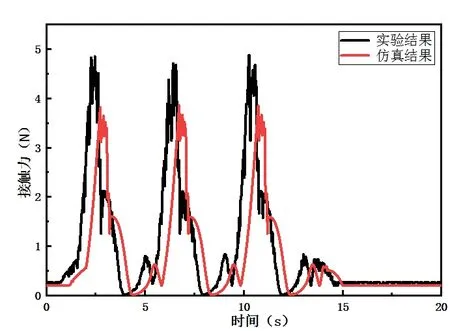
圖16 右肢大腿與外骨骼接觸力曲線
圖16曲線為試驗過程接觸力曲線圖,人體與外骨骼最大接觸力為5N,接觸力在右肢抬到最高點或者與大地接觸的時候,力的一階導數稍大,這是由于在人腿在抬到最高點時候,或者接觸大地時候,大地和外骨骼施加了反向力,在單個運動周期內,人與外骨骼的接觸力無較大的沖擊,表明整個運動過程中,人運動的舒適性較高。
對比圖中試驗與仿真的數據,試驗結果與仿真結果存在一定的偏差,其中的偏差主要原因可能由于物理樣機加工與裝配的精度與試驗測量的精度導致的。
4 結語
本文設計了一款10自由度下肢外骨骼機器人,采用ADAMS仿真軟件完成了人-外骨骼行走的動力學仿真分析,并對所設計的外骨骼機器人進行了樣機的試驗,得到以下結論:
1)該下肢外骨骼機器人結構方案可行,人-外骨骼運動合理。
2)通過ADAMS仿真分析和樣機試驗,觀察人-外骨骼在進行協同運動時步態和試驗曲線結果,表明人-外骨骼能夠穩定的協同運動性,且人-外骨骼運動過程中舒適性較高,若控制物理樣機的加工精度,該人-外骨骼模型具有更高的人機跟隨性。
