刮板輸送機(jī)聯(lián)動(dòng)效應(yīng)參數(shù)化及虛擬實(shí)現(xiàn)
2022-09-01 12:30:28馬繼磐
礦山機(jī)械 2022年8期
馬繼磐
1太重煤機(jī)有限公司 山西太原 030000
2礦山采掘裝備及智能制造國家重點(diǎn)實(shí)驗(yàn)室 山西太原 030024
刮板輸送機(jī)作為綜采工作面的主要運(yùn)輸設(shè)備,其運(yùn)行狀態(tài)對開采效率及安全生產(chǎn)具有重要作用[1]。然而在液壓支架對刮板輸送機(jī)的運(yùn)行狀態(tài)進(jìn)行調(diào)整時(shí),常伴有刮板輸送機(jī)的聯(lián)動(dòng)效應(yīng),這在一定程度上阻礙了刮板輸送機(jī)位姿的調(diào)整。
在對刮板輸送機(jī)位姿分析與調(diào)整方面,有很多學(xué)者進(jìn)行了研究。白曉輝等人[2]根據(jù)中部槽的實(shí)際使用情況與結(jié)構(gòu)特點(diǎn),找出與彎曲角度有關(guān)的參數(shù),列出水平和垂直彎曲的最大角度公式;任中全等人[3]分析了中部槽彎曲的過程以及計(jì)算原理,利用 MATLAB編制圖形用戶界面,解決了設(shè)計(jì)、求解彎曲角度困難、繁瑣的問題;李昊等人[4]根據(jù)綜采工作面刮板輸送機(jī)的橫向彎曲移動(dòng)和縱向運(yùn)輸?shù)膶?shí)際狀況和規(guī)律,建立了刮板輸送機(jī)橫向彎曲分步移動(dòng)模型;王超[5]15分析了中部槽聯(lián)動(dòng)效應(yīng)誤差,指出了聯(lián)動(dòng)效應(yīng)的存在對刮板輸送機(jī)直線度控制的影響。從以上研究可以看出,對刮板輸送機(jī)位姿分析是研究整體推進(jìn)時(shí)直線度控制機(jī)理的基礎(chǔ),對聯(lián)動(dòng)效應(yīng)進(jìn)行分析是刮板輸送機(jī)調(diào)直控制的前提。
但是由于井下環(huán)境復(fù)雜,難以在刮板輸送機(jī)上安裝相關(guān)傳感器,以及通過采煤機(jī)反演刮板輸送機(jī)軌跡時(shí)存在一定的遲滯性[6],使得刮板輸送機(jī)相關(guān)數(shù)據(jù)獲取困難。數(shù)字孿生技術(shù)[7]為解決井下數(shù)據(jù)提取困難提供了解決思路,在虛擬環(huán)境下建立面向液壓支架與刮板輸送機(jī)數(shù)字孿生體,通過對刮板輸送機(jī)數(shù)字孿生體進(jìn)行相應(yīng)的推移動(dòng)作,可以對推移過程中發(fā)生的聯(lián)動(dòng)效應(yīng)進(jìn)行分析。
筆者采用上述方法,對刮板輸送機(jī)聯(lián)動(dòng)效應(yīng)進(jìn)行了參數(shù)化分析,并以 Unity3D 為研究平臺(tái),實(shí)現(xiàn)了虛擬環(huán)境下各中部槽聯(lián)動(dòng)效應(yīng)的可視化。
1 刮板輸送機(jī)中部槽聯(lián)動(dòng)效應(yīng)
1.1 刮板輸送機(jī)整體結(jié)構(gòu)介紹
刮板輸送機(jī)在靠近煤壁處沿工作面全長鋪設(shè)在底板上,負(fù)責(zé)運(yùn)輸割落的煤塊,是采煤機(jī)的運(yùn)行軌道,也是液壓支架進(jìn)行移架的支點(diǎn)[8]。因此,液壓支架的運(yùn)動(dòng)是綜采工作面“三機(jī)”協(xié)同推進(jìn)過程中的關(guān)鍵之一。
如圖 1 所示,刮板輸送機(jī)主要由機(jī)身、機(jī)頭、機(jī)尾及其他附屬部分組成,其中機(jī)身占絕大部分。在煤礦開采過程中,對刮板輸送機(jī)直線度進(jìn)行調(diào)整與控制是保證整個(gè)綜采工作面直線度的關(guān)鍵[5]2。
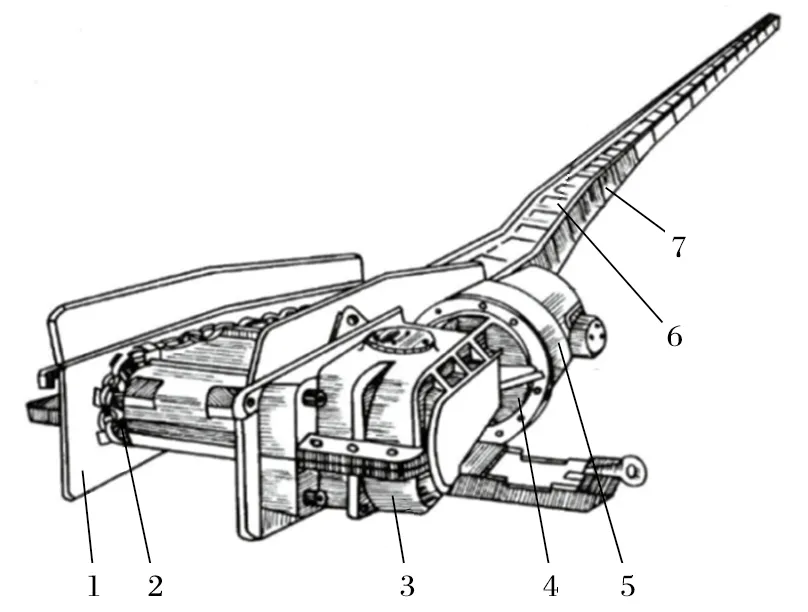
圖1 刮板輸送機(jī)結(jié)構(gòu)示意Fig.1 Structural sketch of scraper conveyor
1.2 刮板輸送機(jī)的中部槽聯(lián)動(dòng)效應(yīng)
在開采過程中,當(dāng)采煤機(jī)截割過后,液壓支架電液控制器需要控制液壓缸將刮板輸送機(jī)推至煤壁,為采煤機(jī)下一個(gè)循環(huán)的截割過程做好準(zhǔn)備。因此,在綜采工作面推進(jìn)過程中,刮板輸送機(jī)具有較強(qiáng)的彎曲性能。根據(jù)綜采工作面的生產(chǎn)作業(yè)需要,刮板輸送機(jī)機(jī)身通常是由啞鈴銷將若干中部槽依次連接構(gòu)成。該結(jié)構(gòu)使得刮板輸送機(jī)滿足了生產(chǎn)作業(yè)的要求,但是阻礙了其位姿的整體調(diào)整。當(dāng)液壓支架對指定的中部槽進(jìn)行推移時(shí),該中部槽的運(yùn)動(dòng)將會(huì)牽動(dòng)若干中部槽的位姿發(fā)生變化,即聯(lián)動(dòng)效應(yīng),如圖 2 所示。筆者將該中部槽稱為主動(dòng)部,因主動(dòng)部運(yùn)動(dòng)而產(chǎn)生聯(lián)動(dòng)的中部槽稱為從動(dòng)部。在對刮板輸送機(jī)直線度進(jìn)行調(diào)整時(shí),如果不考慮中部槽之間聯(lián)動(dòng)效應(yīng)的影響,將無法保證刮板輸送機(jī)的直線度。

圖2 聯(lián)動(dòng)效應(yīng)示意Fig.2 Sketch of linkage effects
2 刮板輸送機(jī)中部槽聯(lián)動(dòng)效應(yīng)參數(shù)化
在對中部槽聯(lián)動(dòng)效應(yīng)進(jìn)行分析時(shí),由于聯(lián)動(dòng)效應(yīng)主要體現(xiàn)在水平方向,因此將中部槽簡化為圖 3 所示的矩形結(jié)構(gòu)。
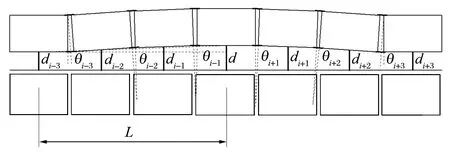
圖3 中部槽簡化示意Fig.3 Simplified sketch of middle groove
設(shè)液壓支架推動(dòng)了第i節(jié)中部槽,與其相鄰的左右兩側(cè)各有n節(jié)中部槽產(chǎn)生了聯(lián)動(dòng)。選取被推動(dòng)中部槽左側(cè)的從動(dòng)部為研究對象,得到各中部槽的偏轉(zhuǎn)角度

式中:θ i-n為與主動(dòng)部相隔n個(gè)中部槽的從動(dòng)部的聯(lián)動(dòng)角度,也稱為最大聯(lián)動(dòng)偏轉(zhuǎn)角;d為主動(dòng)部的被推移距離;L為未發(fā)生聯(lián)動(dòng)效應(yīng)的中部槽與主動(dòng)部之間的最小距離。
主動(dòng)部發(fā)生位置變化時(shí),從動(dòng)部位置跟隨變化。已知主動(dòng)部的移動(dòng)距離,根據(jù)刮板輸送機(jī)的偏轉(zhuǎn)特性,得到各從動(dòng)部的聯(lián)動(dòng)位移

在刮板輸送機(jī)發(fā)生聯(lián)動(dòng)效應(yīng)時(shí),其縱向運(yùn)行姿態(tài)在很大程度上會(huì)受到煤層起伏的影響,如圖 4 所示。
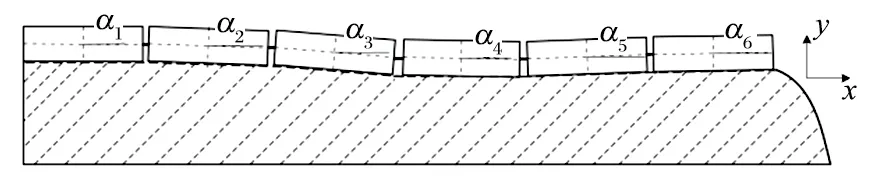
圖4 沿縱向平面的刮板輸送機(jī)姿態(tài)示意Fig.4 Sketch of posture of scraper conveyor along longitudinal plan
由于煤層底板的起伏信息未知,因此筆者選用刮板輸送機(jī)的定位信息對其進(jìn)行縱向位姿分析。圖 5 所示為姿態(tài)分析示意圖,其中定位基準(zhǔn)點(diǎn)為機(jī)頭靠近巷道處外側(cè)標(biāo)定的關(guān)鍵點(diǎn)。
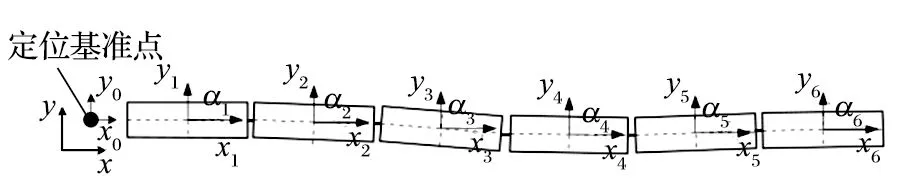
圖5 姿態(tài)分析示意Fig.5 Sketch of posture analysis
當(dāng)刮板輸送機(jī)鋪設(shè)在煤層底板上時(shí),得到的各中部槽的縱向偏轉(zhuǎn)角
式中:αi為中部槽相對于定位基準(zhǔn)點(diǎn)的絕對縱向偏轉(zhuǎn)角;α i′為中部槽相對于相鄰中部槽的相對縱向偏轉(zhuǎn)角。
3 刮板輸送機(jī)中部槽虛擬聯(lián)動(dòng)效應(yīng)的實(shí)現(xiàn)
筆者將液壓支架群簡化為底座群進(jìn)行刮板輸送機(jī)的推移。將建立好的 3D 模型導(dǎo)入 Unity3D 中 (見圖4),在底座群上安裝 Box Collider 碰撞體,相鄰 2 節(jié)中部槽采用 Character Joint 碰撞體進(jìn)行連接以代替啞鈴銷的作用,在中部槽鏟煤板處安裝 Capsule Collider 以使底座群與刮板輸送機(jī)在復(fù)雜地質(zhì)條件下順利推進(jìn)[9];在刮板輸送機(jī)推移耳座處安裝若干 Capsule Collider 碰撞體,使得該碰撞體群能與推移耳座的形狀吻合,避免在液壓支架推移過程中連接頭與中部槽產(chǎn)生干涉。在完成碰撞體添加過程后 (見圖 6),在各中部槽與液壓支架底座上安裝 RigidBody 剛體組件,即可實(shí)現(xiàn)場景運(yùn)行時(shí)裝備能自適應(yīng)鋪設(shè)在虛擬煤層上。
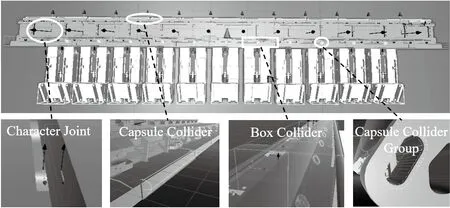
圖6 物理引擎添加示意Fig.6 Sketch of addition of physical engine
4 仿真驗(yàn)證
井下空間狹窄,刮板輸送機(jī)上沒有安裝相關(guān)的傳感器,無法獲得相關(guān)數(shù)據(jù)。因此筆者基于數(shù)字孿生理論在仿真環(huán)境下進(jìn)行相關(guān)研究。
如圖 7 所示,按照式 (1)、(2) 分別進(jìn)行刮板輸送機(jī)彎曲動(dòng)作與液壓支架推動(dòng)中部槽動(dòng)作。液壓支架推動(dòng)第 7 節(jié)中部槽,與其相鄰的共有 4 節(jié)中部槽產(chǎn)生了聯(lián)動(dòng)效應(yīng),得到各中部槽的偏轉(zhuǎn)角度以及被推移距離。理論聯(lián)動(dòng)值與虛擬聯(lián)動(dòng)值的對比如圖 8 所示。
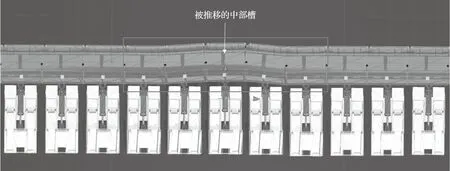
圖7 虛擬聯(lián)動(dòng)效應(yīng)Fig.7 Virtual linkage effects
由圖 8 可知,虛擬聯(lián)動(dòng)角度與理論聯(lián)動(dòng)角度間的平均誤差約為 0.39°,最大誤差約為 1.55°;虛擬聯(lián)動(dòng)距離與理論聯(lián)動(dòng)距離間的平均誤差約為 0.34 cm,最大誤差約為 1.35 cm。由此可以看出,虛擬聯(lián)動(dòng)方法可有效地對刮板輸送機(jī)推進(jìn)過程中的聯(lián)動(dòng)效應(yīng)進(jìn)行描述。
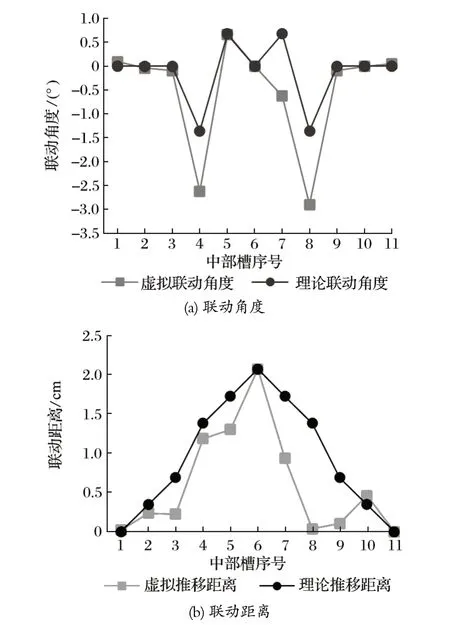
圖8 分析結(jié)果Fig.8 Analysis results
中部槽的絕對縱向偏轉(zhuǎn)角如圖 9 所示。可以看出按照式 (3) 計(jì)算得到的絕對縱向偏轉(zhuǎn)角與仿真分析得到的絕對偏轉(zhuǎn)角之間的最大誤差約為 1.3°,說明筆者建立的絕對縱向偏轉(zhuǎn)角模型較可靠。
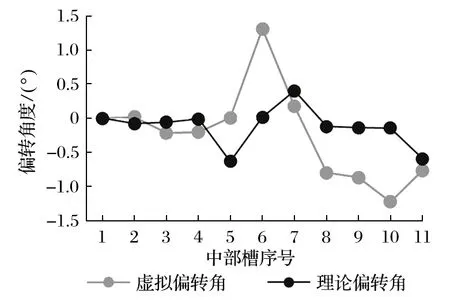
圖9 絕對縱向偏轉(zhuǎn)角Fig.9 Absolute longitudinal deviation angle
但是從分析結(jié)果也可以看出,未發(fā)生聯(lián)動(dòng)效應(yīng)的中部槽的偏轉(zhuǎn)角度、推移距離同樣也發(fā)生了變化,且偏轉(zhuǎn)角度也存在一定的誤差。除了模型本身存在的誤差外,主要有 2 個(gè)原因?qū)е隆?/p>
(1) 虛擬環(huán)境下物理引擎的影響。由于各中部槽間在 Character Joint 的連接作用下產(chǎn)生了振動(dòng);另外在推進(jìn)過程中,裝備底側(cè)的碰撞體與虛擬煤層上的碰撞體間的相互作用也會(huì)產(chǎn)生微弱的振動(dòng),使得裝備的位姿發(fā)生微弱的變化。
(2) 提取數(shù)據(jù)時(shí),煤層起伏對虛擬中部槽推進(jìn)的影響。由于煤層底板存在起伏,使得刮板輸送機(jī)在推進(jìn)的過程中受到一定的來自底板的約束力,進(jìn)而使得獲得的各中部槽坐標(biāo)較推移后的理想坐標(biāo)之間存在一定波動(dòng),因此提取的各中部槽坐標(biāo)相對于定位基準(zhǔn)存在一定的誤差。
5 結(jié)語
提出了一種刮板輸送機(jī)聯(lián)動(dòng)效應(yīng)參數(shù)化及虛擬實(shí)現(xiàn)方法。對刮板輸送機(jī)發(fā)生聯(lián)動(dòng)效應(yīng)時(shí)相關(guān)中部槽的位姿變化進(jìn)行了參數(shù)化分析,在起伏條件下對刮板輸送機(jī)的姿態(tài)進(jìn)行了分析,得到了聯(lián)動(dòng)角度與聯(lián)動(dòng)距離的計(jì)算公式;在虛擬環(huán)境下,對參數(shù)化模型與虛擬仿真結(jié)果進(jìn)行了對比分析,聯(lián)動(dòng)角度與聯(lián)動(dòng)距離的平均誤差約為 0.39°與 0.34 cm,最大誤差約為 1.55°與1.35 cm,縱向偏轉(zhuǎn)角與仿真分析得到的偏轉(zhuǎn)角之間的最大誤差約為 1.3°,證明了所提出的模型的有效性。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
中學(xué)物理·高中(2016年12期)2017-04-22 11:53:03
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
航天器工程(2014年5期)2014-03-11 16:35:55
