可逆式水輪發電機組鏡板形貌視覺測量方法研究
2022-09-01 03:25:02張衡李江濤盧寶江
微型電腦應用 2022年8期
張衡, 李江濤, 盧寶江
(國網新源控股有限公司北京十三陵蓄能電廠,北京 102200)
0 引言
可逆式水輪發電機是水力發電系統中重要的動力來源,鏡板是發電機組中關鍵零部件之一,準確地測量鏡板平面度和閉合差等指標非常重要[1]。目前的技術由于采樣布點方式不同、測量儀器的精度和數據處理方式不同,造成對于可逆式發電機鏡板環形平面度測量精度不高,影響了發電機組的性能,從而影響了整個水力發電系統的工作效率[2]。
針對上述存在的問題,文獻[3]提出了液面測量法,通過測量液體的平面變化、各點的相對偏移量,得出平面度誤差。由于液體具有一定的黏性,在測量過程中需要將兩側液體穩定,測量時間較長,同時溫度變化對測量結果有很大影響,造成檢測精度不高。文獻[4]研究應用激光準直掃描法,通過光電接收系統測得激光基準平面上各點的位移變化,計算得到平面度誤差。激光在空氣中傳播受到其他因素的影響,使折射率不均勻,造成了測量不穩定的問題。
針對上述研究存在的不足,本文應用鏡板視覺采樣測量系統,通過激光位移傳感器、鍵相傳感器、定位傳感器和光纖傳感器來感應鏡板位移的變換,進行周期性采樣,經過齊次矩陣變換計算出發電機組鏡板的平面度和閉合差。測量系統對測量環境的溫度和濕度的要求不高,機械振動對測量精度的影響較小。
1 鏡板形貌視覺測量方法
本文的創新點:在測量系統中加入放大電路,對輸入信號進行放大,共模抑制比較高,對測量過程中發電機組產生的噪聲起到了衰減作用,降低電磁干擾的影響,提高測量系統的測量精度。
1.1 鏡板視覺采樣測量系統
可逆式水電發電機組的鏡板尺寸大、對測量的精度要求高,給機械加工制造和水平度的測量帶來很大困難[5]。鏡板造價成本較高、加工時間長且零部件具有不可替代性、機械結構特殊對平面度測量系統提出了更高的要求[6]。表1所示為對測量系統的要求。
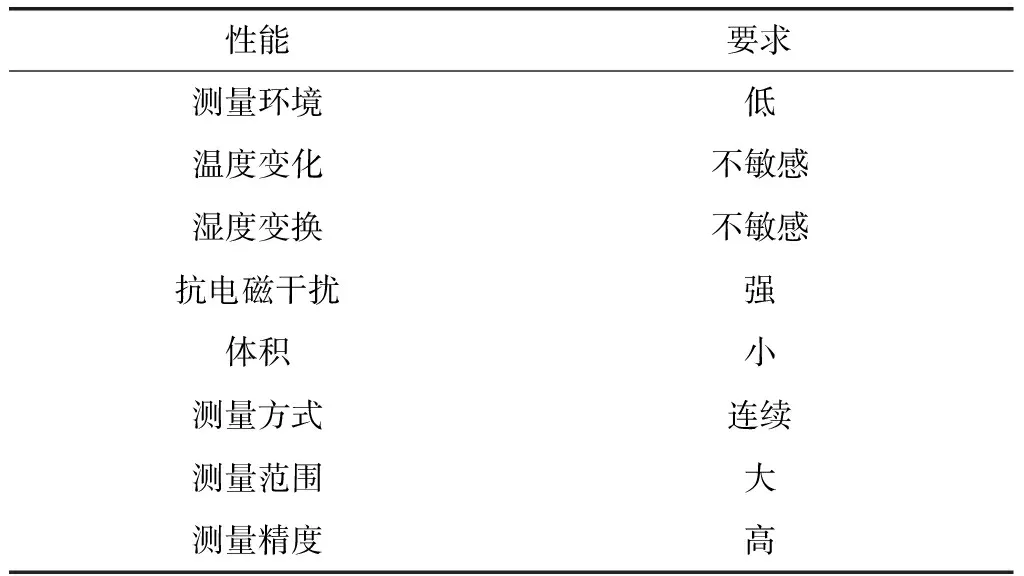
表1 發電機組鏡板對測量系統的要求
測量環境在加工車間中環境質量不佳,且空氣的溫度和濕度不恒定,存在各種因素的影響造成空氣擾動,所以要求測量系統的有效測量范圍大,且測量精度高、測量速度快[7]。嚴格的測量要求使很多測量方式無法適用,機械基準測量法使用高精度機械軌道和回轉系統,只能分離系統誤差,對鏡板平面度測量產生的隨機誤差無法消除[8]。
根據對可逆式水電發動機組鏡板平面度測量的特殊要求,本文應用一種鏡板視覺采樣測量系統,系統結構如圖1所示。
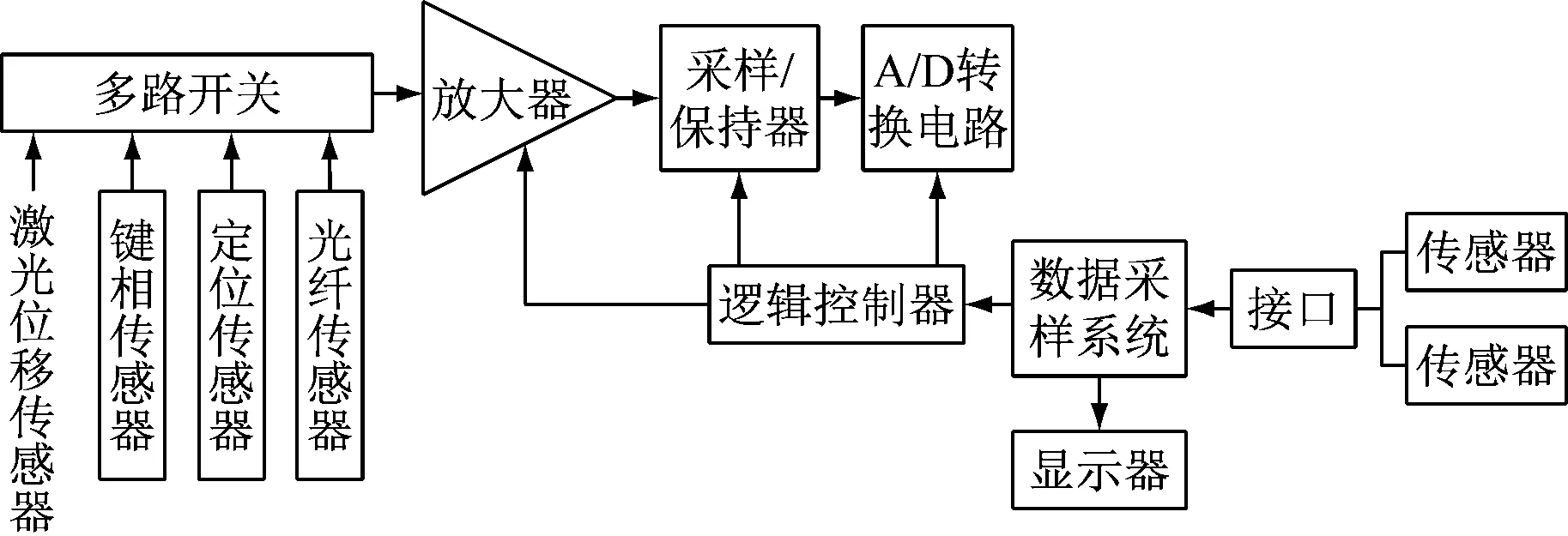
圖1 鏡板視覺采樣測量系統結構圖
鏡板視覺采樣測量系統總體由傳感器、數據采集系統、顯示模塊等部件組成[9],具體有激光位移傳感器、鍵相傳感器、定位傳感器和光纖傳感器,用來感應發電機組鏡板每次運動的位置變換,記錄部件的擺動數據和機組轉動的角度[10]。數據采集系統接收各種傳感器傳輸來的數據,在電路中實現數字信號和模擬信號之間的轉換,在系統中儲存傳感器傳來的數據,進行整理、計算和分析[11]。表2所示為鏡板視覺采樣測量系統的采樣指標。
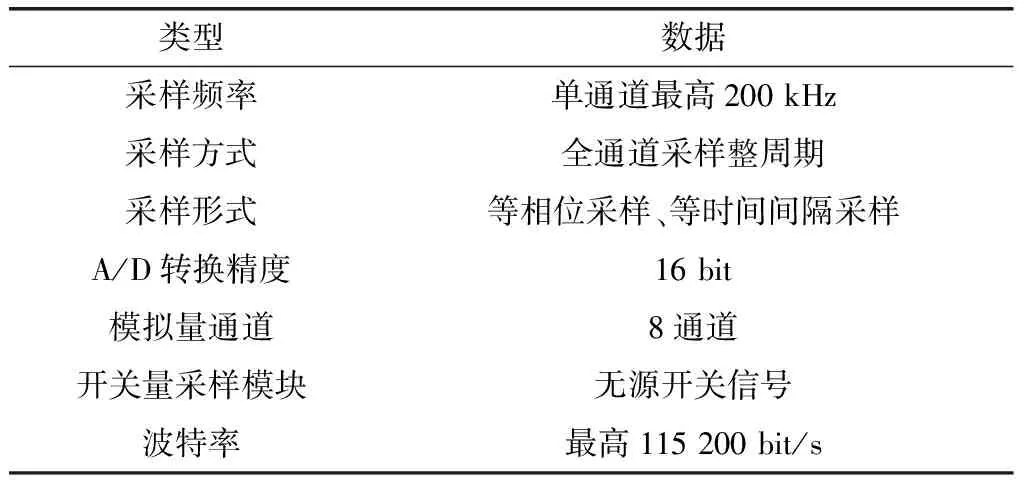
表2 數據采樣指標
系統在硬件設備上集成實現其具體功能,根據發電機組鏡板對測量系統的要求,裝置的體積不能過大,采用標準4U高度,便攜式結構方便安裝和測量[12]。傳統的測量系統,由于測量環境空氣中的雜質和發電機組造成的振動,使測量儀器連接器故障和線路損壞,導致測量出現失誤。本系統的采樣設備使用單板系統結構設計,減少了因測量環境問題造成的故障,高集成度的芯片處理和傳輸速度更快[13]。系統采樣以多路通道設置采樣模式,單個傳感器可實現多路多功能采樣通道,最高頻率可達到100 kHz。多個傳感器同時工作,協同測量,并且系統中設置有抗電磁干擾的功能,使傳感器在發電機組鏡板平面度的測量過程中能夠正常工作[14]。各個傳感器之間互相連接,且各采樣通道互相分離,一個傳感器通道受損,其他傳感器仍然能夠正常使用。
1.2 測量系統中的信號調理電路
信號調理電路是對測量系統中信號的放大和濾波。由于傳感器在對發電機組鏡板的平面度測量中,發電機經常會產生噪聲,對信號的傳導產生干擾,造成系統誤差,使測量精度下降[15]。因此,在電路中加入濾波器,對噪聲信號進行處理,在一定程度上使信號衰減,從而提高信噪比,減小了測量誤差,提高了測量系統的精度[16]。如圖2所示為分壓電路。
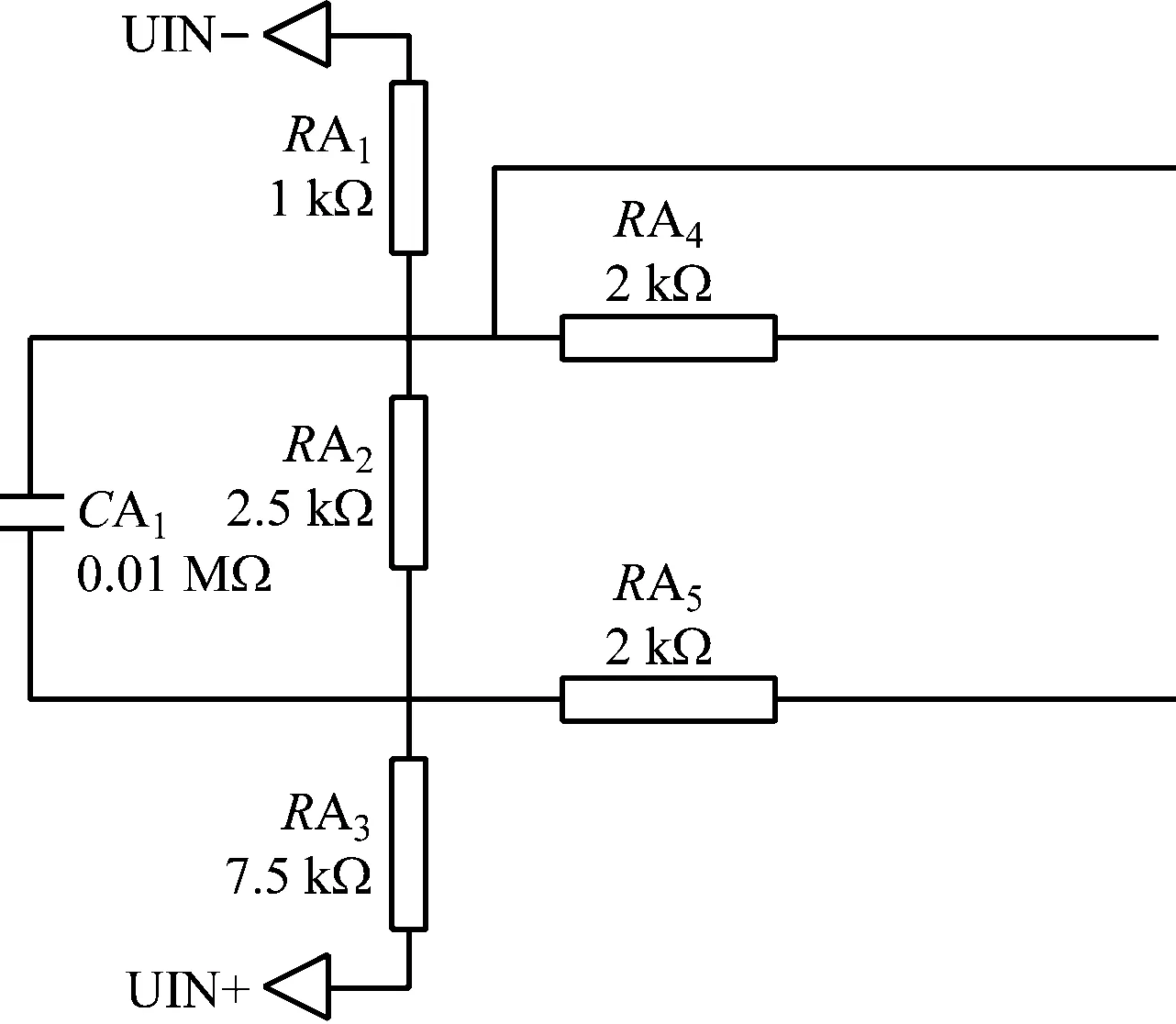
圖2 分壓電路
鏡板視覺采樣測量系統輸出電壓信號,電壓范圍是-2~-18 V。需要對輸出進行處理以滿足輸入電壓的有效值,有效范圍是-3~+3 V。所以采用分壓電路對傳感器的輸出信號進行處理。分壓電路中配置參數如表3所示。

表3 分壓電路配置參數
經過以上分壓電路處理后的輸入信號進入放大電路,降低信號中的噪聲。放大電路的核心是運放,能夠放大頻帶帶寬,受信號中噪聲影響較小,共模抑制比高且溫度穩定。放大電路如圖3所示。
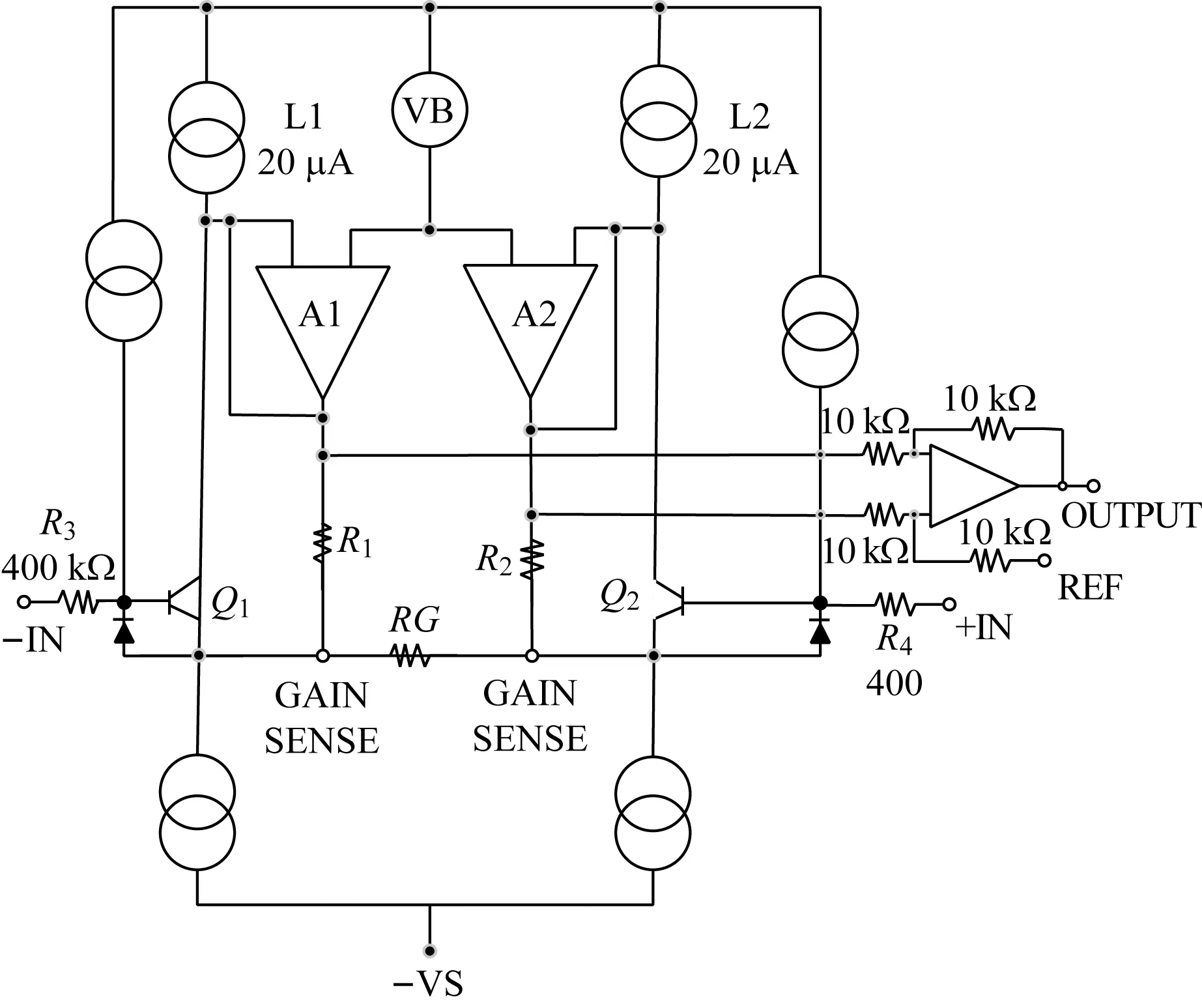
圖3 放大電路
放大電路由電容、電阻和放大器通過串聯和并聯的方式組成。輸入端晶體管Q1、Q2輸入特性為差分雙極性,且精度較高,還應用了SuperBeta進行處理,降低了輸入端的偏執電流。電阻R限制了輸出電壓的幅值,使輸出電壓不會過大也不會過小。放大電路中Q1/A1/R1和Q2/A2/R2組成了反饋環路,不受其他因素的影響,集成電流保持一定。因此產生了從輸入至A1/A2的差分增益,表達式為
G=(R1+R2)/RG+1
(1)
其中,G表示差分增益,R表示各電阻的阻值。RG確定了前級功放,RG越小放大倍數就越大,增益可表示為
(2)
分壓和放大電路的作用是將輸入信號進行處理,模擬信號轉換為數字信號,輸出信號的電壓保持在-5~+5 V范圍內。
在番茄無公害栽培期間,如果是選擇單干整枝方式,應該保留番茄主干,單株結實達到5-7穗果時,頂部果穗留兩片葉摘心,將其中的枯枝和葉子全部摘除,避免滋生病蟲害影響番茄植株正常生長。
1.3 測量點位置的計算與變換
實現對可逆式水輪發電機組鏡板平面度的測量的關鍵是對測量點位置的計算與變換。本文對測量系統進行位置運動學分析,利用齊次矩陣變換原理得到測量系統的數學模型。齊次矩陣坐標變換如圖4所示。
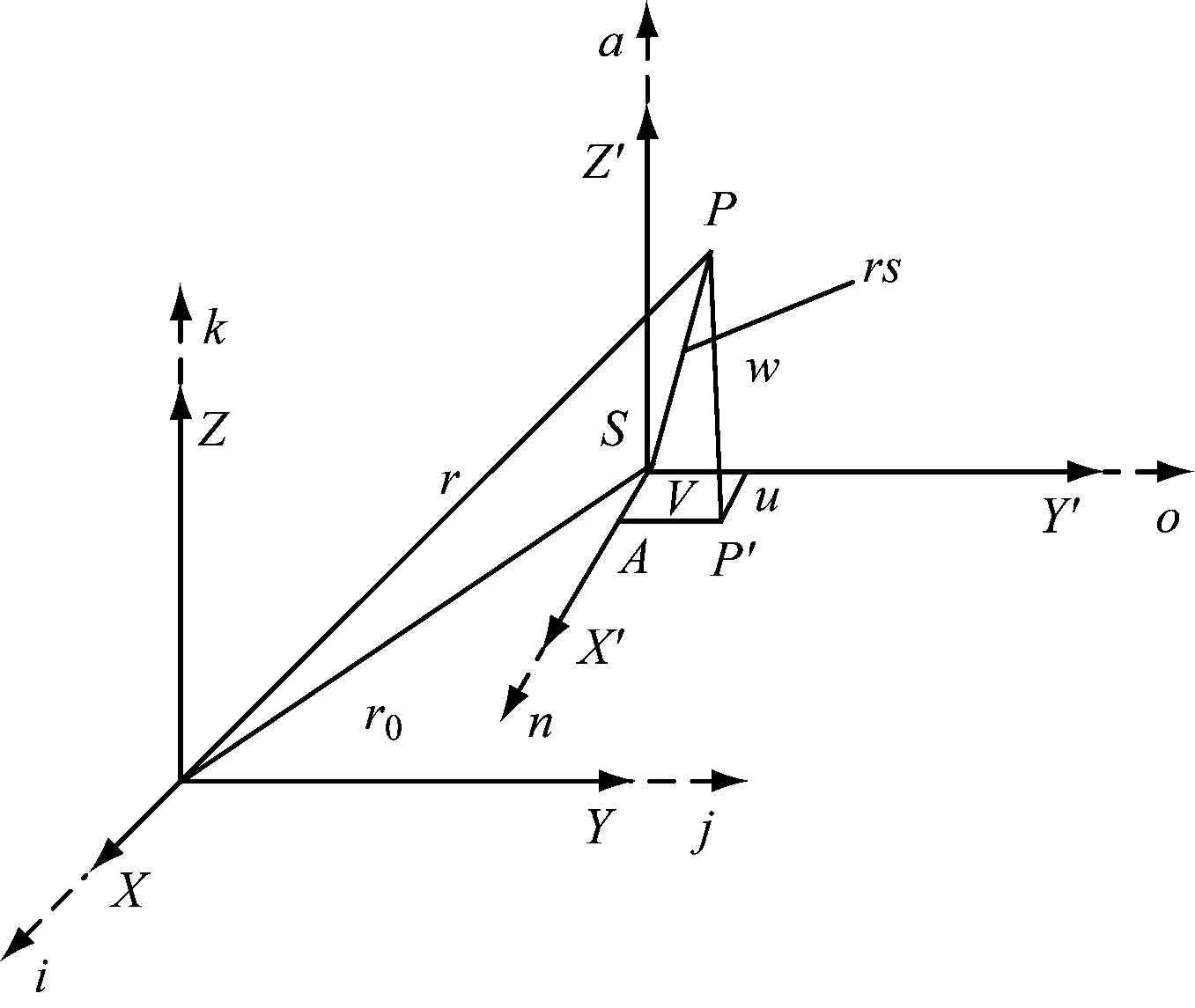
圖4 齊次矩陣坐標變換


(3)
由圖3可知:
(4)
式(3)和式(4)結合可得:

(5)
式(5)可以表示成矩陣形式:
(6)
(7)
繞Y軸轉動可表示為
(8)
繞Z軸轉動可表示為
(9)
原始坐標系經過移動后可表示為
(10)
由于測量系統是在三維空間中測量鏡板運動的系統,要想測量準確就要先了解運動的幾何關系,對位置運動學進行研究,根據位移變量求位置。即繞Y軸轉動和Z軸轉動,綜合這兩種運動變換,可得到正向變換齊次矩陣:
(11)
在測量實驗的實際情況下,由于鏡板在不同位置繞Y軸的轉動量遠遠小于鏡板繞Z軸轉動的變量,因此在坐標轉換時可不考慮繞Y軸轉動對測量的影響,對每一次轉位只考慮繞Z軸的轉動,可以簡化為運動只在XY平面內旋轉,是測量計算過程簡化,對測量鏡板平面度連續走位進行分析時也可以進行簡化。經過簡化后的坐標齊次矩陣為
(12)
通過分析鏡板不同位置的測量變換數據,可以測算出鏡板平面度的大小。根據各種傳感器回傳的數據,完成對發電機組鏡板的測量。
2 應用測試
為驗證所研究智鏡板視覺采樣測量系統的性能,在測量過程中隨機選取5個測量點并記錄測量點的位置,如表4所示。對發電機組鏡板分別使用3種測量方式進行測量,對比測量數據上的誤差,分析測量系統的精度。

表4 測量點位置 單位:mm
在溫度、濕度一致的測量環境下進行試驗,測量時采用封閉網格形式布線,隨時得到測量點的位置信息,對表4測量點進行測量。表5所示為本文系統對測量點的測量結果和數據誤差,表6所示為文獻[3]的測量結果,表7所示為文獻[4]的測量結果。
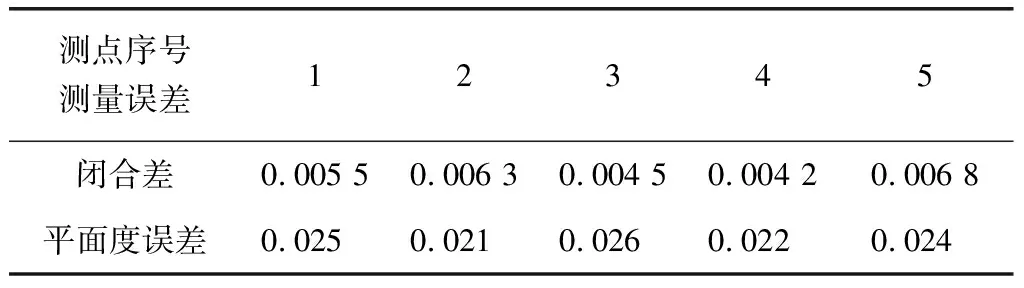
表5 本文系統的測量結果 單位:mm
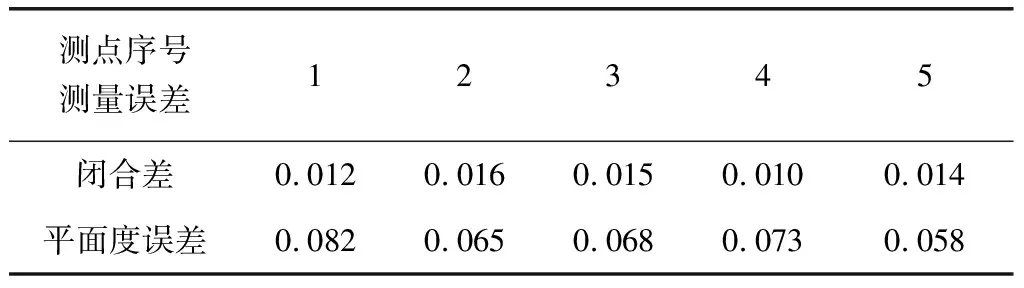
表6 文獻[3]的測量結果 單位:mm
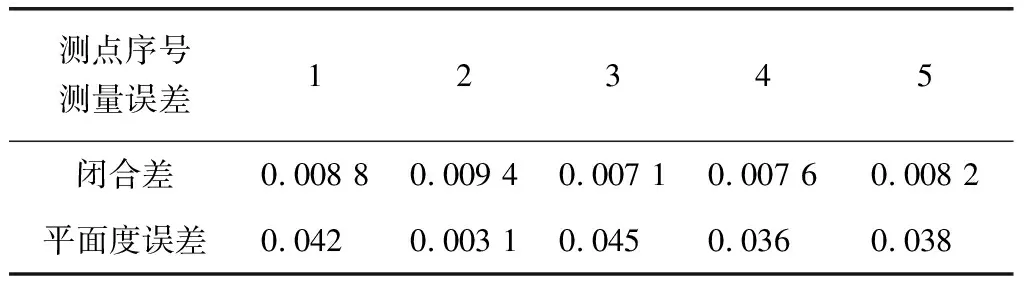
表7 文獻[4]的測量結果 單位:mm
通過觀察對比測量結果可知,本研究測量系統對發電機組鏡板的測量精度更高,測量誤差更小。經計算可得,本研究測量系統對鏡板測量的平均閉合差誤差為5.6 μm,平均平面度誤差為23.6 μm。文獻[3]測量系統的平均閉合差誤差為13.4 μm,平均平面度誤差為85.6 μm。文獻[4]測量系統的平均閉合差誤差為8.22 μm,平均平面度誤差為38.4 μm。通過對比數據,本文測量系統的閉合差誤差和平面度誤差最小,因為本文測量系統不受溫度變化的影響,測量過程中機械的振動對測量結果的影響不大,傳感器具有抗電磁干擾的能力。對第5個測量點測量時,本系統閉合差誤差最高為6.8 μm,而文獻[3]的閉合差誤差高達14 μm,文獻[4]的閉合差誤差達到了8.2 μm。測量過程中環境溫度變化較大,產生的機械振動對文獻[3]測量方法的影響最大。本文測量方法抗干擾能力最強,多個傳感器同時作用,測量誤差最小,完全滿足可逆式水輪發電機組鏡板測量規范要求。
3 總結
本文應用鏡板采樣視覺測量系統,通過傳感器、數據采集系統和顯示模塊協同作用,完成了對可逆式水輪發電機組鏡板的測量工作,在測量系統中應用了信號調理電路,完成了傳感器數據傳輸中數字信號與模擬信號的轉換,對測量系統中信號起到放大和濾波功能,減少了信號中噪聲對測量數據的影響,提高了測量系統的精度,減少了系統誤差。本文研究也存在一定的局限性,測量系統僅對可逆式水輪發電機組的鏡板進行測量,根據鏡板特征設計的測量系統,而對于臥式水輪發電機組、多段式的水輪發電機組的鏡板測量沒有涉及,可能無法適用,對測量系統還需改進。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
