基于UWB TOF測距的礦井精確定位方法研究
2022-09-01 10:37:54王飛
自動化儀表 2022年8期
王 飛
(1.中煤科工集團重慶研究院有限公司,重慶 400039;2.瓦斯災害監控與應急技術國家重點實驗室,重慶 400037)
0 引言
隨著智能礦山建設的推進,礦井精確定位系統在煤礦井下得到推廣應用[1]。山東煤礦安全監察局發布的《山東煤礦人員精確定位系統技術要求(試行)》明確規定:系統在理想狀態的靜態定位誤差小于0.3 m,采煤工作面、掘進工作面及運輸巷道的靜態定位誤差小于1.0 m[2]。因此,研究礦井精確定位方法、實現對井下人員的精確定位,有利于提高礦井安全生產管理水平。一旦發生礦井災害事故,救援隊伍可以準確、快速地到達災難現場實施救援工作[3]。
目前,超寬帶(ultra wide band,UWB)定位技術具有定位精度高、并發容量大、通信速率快和抗干擾能力強等特點[4-5],定位精度可達30 cm,得到了越來越多科研機構和研究單位的重視。針對UWB定位技術,主要有3種定位方法[6]:到達時間(time of arrival,TOA)、到達時間差(time difference of arrival, TDOA)和飛行時間(time of flight,TOF)。TOA需要定位卡與定位基站、定位基站與定位基站之間嚴格時鐘同步,所以系統時鐘同步困難、晶振穩定性要求高、系統復雜、成本高[7]。TDOA不需定位卡與定位基站時鐘同步,但需定位基站與定位基站之間嚴格時鐘同步,所以系統時鐘同步困難、晶振穩定性要求高、成本較高[8]。TOF不需要定位卡與定位基站、定位基站與定位基站之間嚴格時鐘同步,所以系統簡單、成本低[9]。
針對礦井線型巷道和交叉路口,本文提出一種基于UWB TOF測距的礦井精確定位系統。該系統定位基站之間、定位基站與定位卡之間均無需時鐘同步,大大降低了定位基站和定位卡的復雜度和成本,實現了礦井巷道高精度精確定位。該系統具有設備安裝便捷、組網靈活、擴展性強、適用性廣的優點,能夠滿足礦井巷道的精確定位需求。
1 總體設計
1.1 系統架構
礦井精確定位系統主要包括服務器、工業以太環網、定位基站和定位卡這4個部分。UWB精確定位系統網絡拓撲如圖1所示。
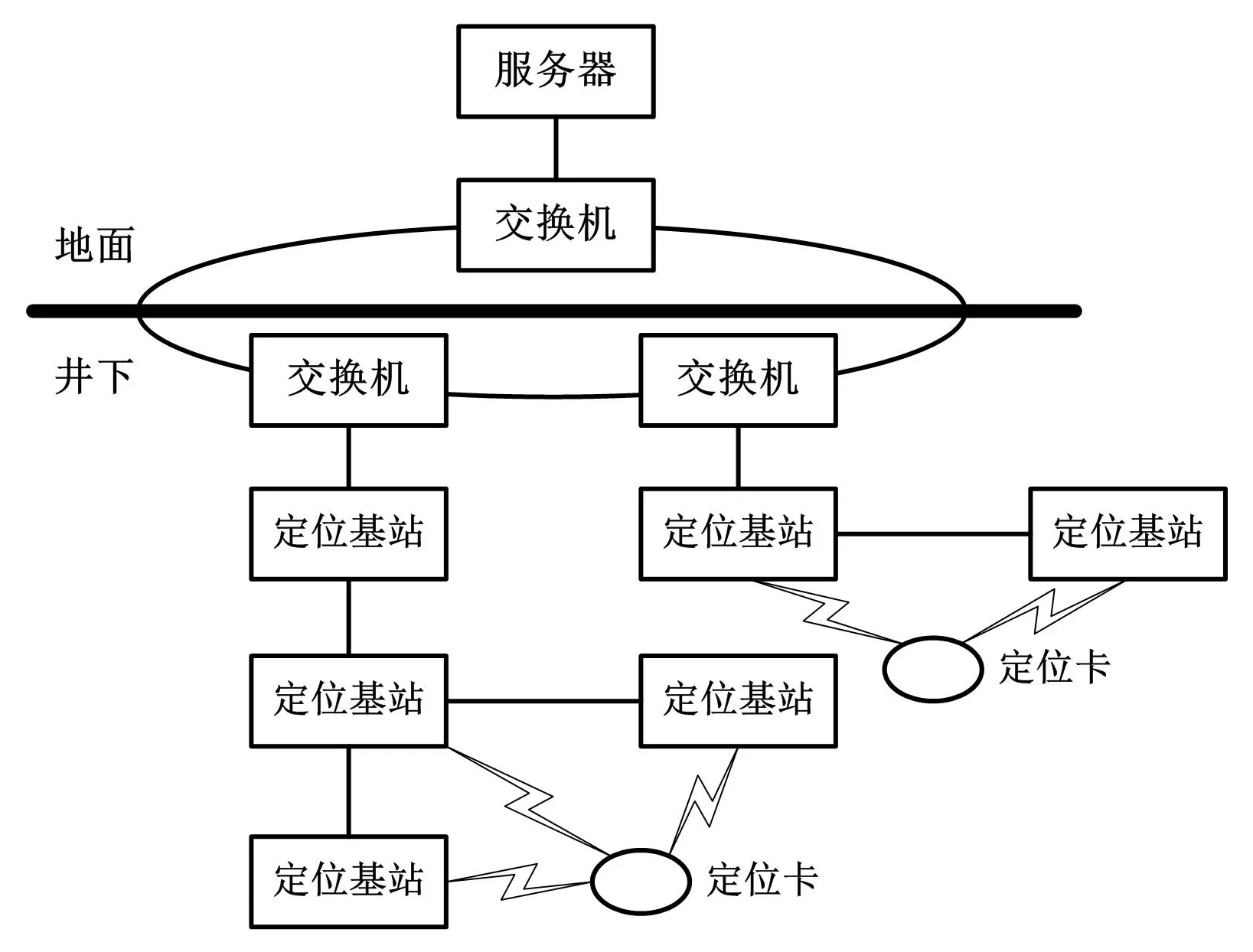
圖1 UWB精確定位系統網絡拓撲圖
服務器根據TOF測距值計算出定位卡的具體位置。工業以太環網由交換機組成,建立高速數據傳輸通道。定位基站具有3路光纖接口和1路UWB通道。定位卡具有1路UWB通道。定位基站通過光纖接口建立1個樹型以太網,用于高速、可靠和實時地傳輸精確定位數據。定位基站采用UWB通道與定位卡進行TOF測距,測得定位基站與定位卡之間的距離值。定位基站通過樹型以太網、工業以太環網將TOF測距值傳輸至服務器。服務器采用線型巷道定位算法或交叉路口算法得出定位卡的具體位置,從而實現礦井巷道的精確定位。
1.2 基站組網
在礦井巷道中,定位基站主要有2種組網模式,分別為線型巷道組網和交叉路口組網。定位基站組網模式如圖2所示。
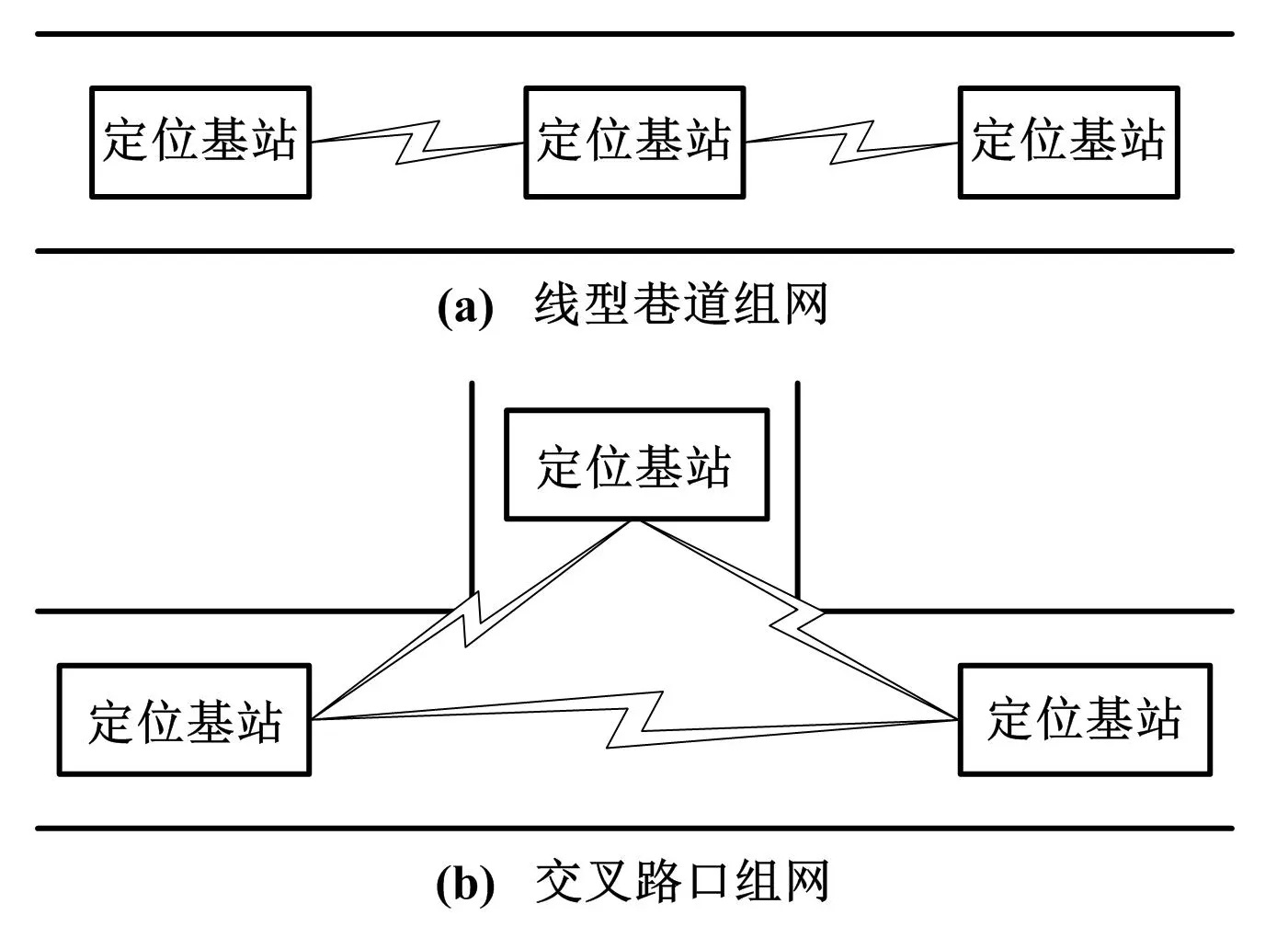
圖2 定位基站組網模式
在線型巷道,每隔一段距離布置1臺定位基站。在交叉路口,每個路口處布置1臺定位基站。定位基站之間無需時鐘同步,相鄰基站之間需要完全重疊覆蓋,從而保證定位卡能與多個定位基站同時進行TOF測距。
定位基站組網流程如圖3所示。
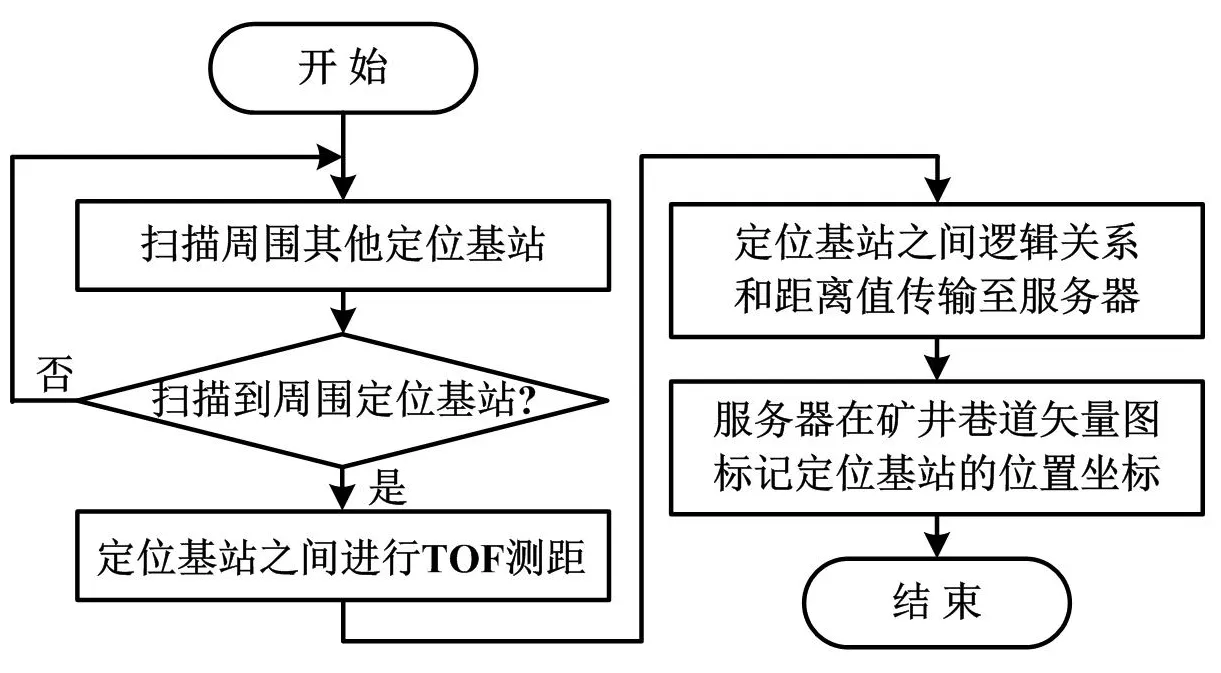
圖3 定位基站組網流程圖
2 精確定位技術
2.1 改進型TOF測距技術
TOF測距原理如圖4所示。一般TOF測距需要3次通信[10]。
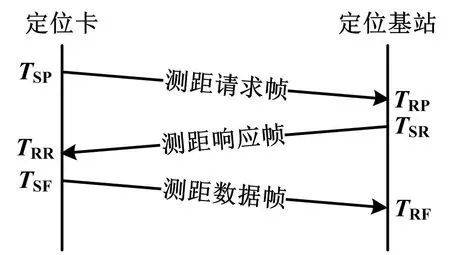
圖4 TOF測距原理圖
(1)
式中:TSP為測距請求幀的發送時間戳;TRP為測距請求幀的接收時間戳;TSR為測距響應幀的發送時間戳;TRR為測距響應幀的接收時間戳;TSF為測距數據幀的發送時間戳;TRF為測距數據幀的接收時間戳;TF為UWB無線信號在定位卡與定位基站之間的飛行時間。
使用式(1)計算得出UWB信號在定位基站與定位卡之間的空中飛行時間TF,具有更高的測距精度,可大幅降低晶振漂移造成的定位誤差[11]。
因此,定位卡與定位基站之間的距離計算公式為:
D=TF×C
(2)
式中:D為定位卡與定位基站之間的TOF測距值;C為光速,3.0×108m/s。
在線型巷道處,定位卡要與2個定位基站進行TOF測距。在交叉路口處,定位卡要與3個定位基站進行TOF測距。因此,定位卡分別需要進行6次或9次UWB通信。為了減少測距時間、提高測距效率,對TOF點對多點測距流程進行了優化,提出改進型TOF點對多點測距方法。改進型TOF點對多點測距原理如圖5所示。
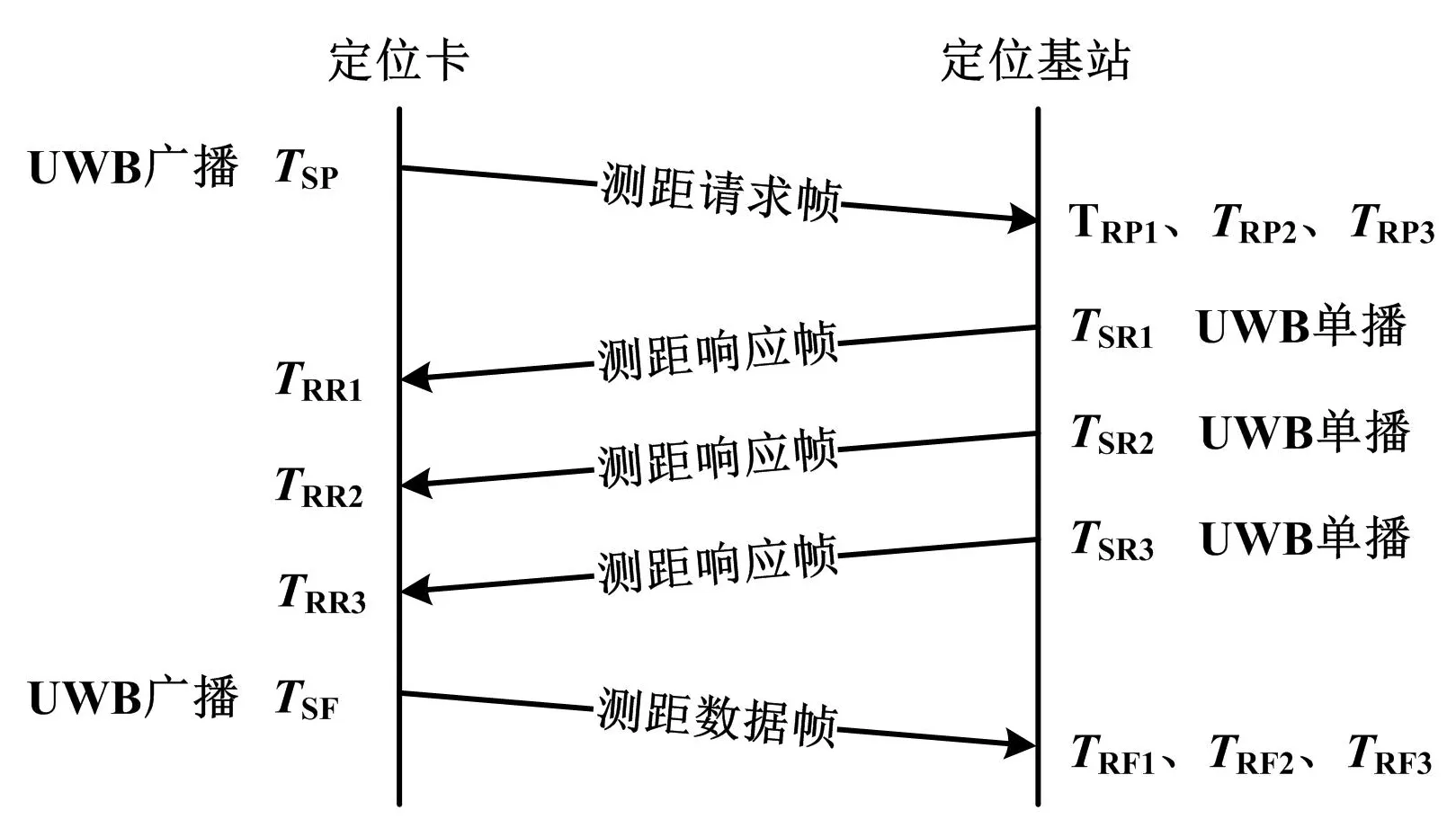
圖5 改進型TOF點對多點測距原理圖
定位卡廣播發送測距請求幀。周圍的定位基站接收后依次回復測距響應幀。定位卡廣播發送測距數據幀。因此,采用改進型TOF點對多點測距方法時,定位卡在線型巷道、交叉路口處僅需4次或5次UWB通信。
參照式(1)、式(2),可以計算得出定位卡與多個定位基站之間的距離。
2.2 線型巷道定位算法
針對線型巷道,定位基站M與定位基站N之間的距離為DMN。線型巷道位置分布如圖6所示。
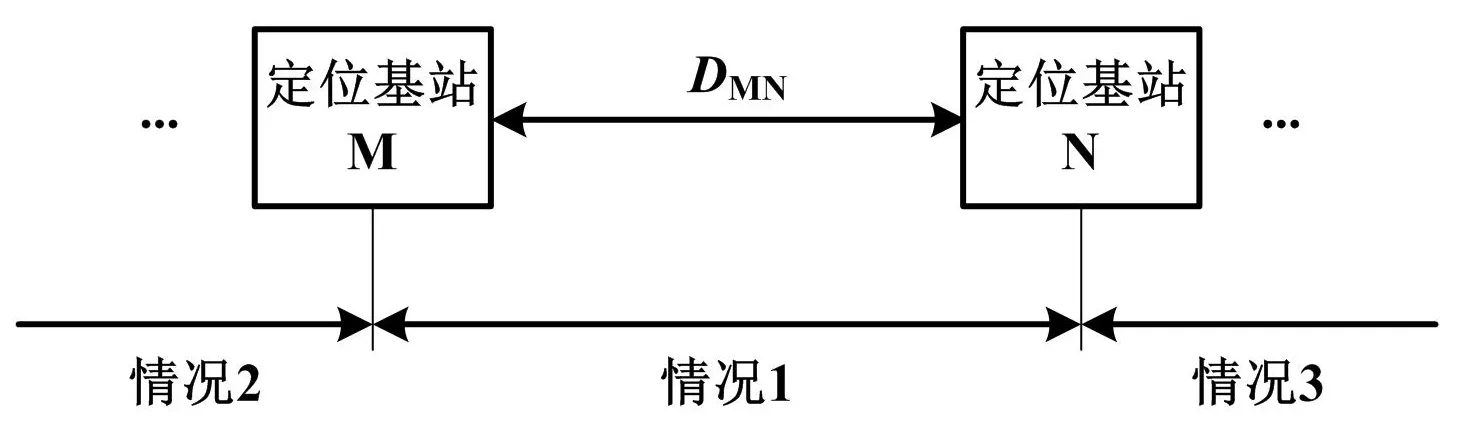
圖6 線型巷道位置分布
線型巷道定位算法流程如圖7所示。
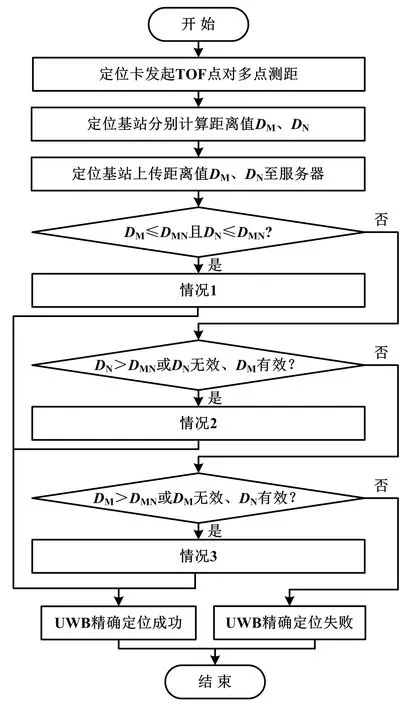
圖7 線型巷道定位算法流程圖
圖7中,定位卡具體位置存在以下3種情況。
①情況1:定位卡在定位基站M與定位基站N覆蓋區域的中間。
②情況2:定位卡在定位基站M與定位基站N覆蓋區域的左側。
③情況3:定位卡在定位基站M與定位基站N覆蓋區域的右側。
采用改進型TOF點對多點測距方法,計算出定位卡與定位基站M、定位基站N的距離值為DM、DN。服務器根據DM、DN和DMN,確定定位卡的具體位置,從而實現線型巷道精確定位。
2.3 交叉路口定位算法
針對交叉路口(如三岔路口等),定位基站A、定位基站B和定位基站C相互之間的距離為DAB、DBC、DAC。交叉路口位置分布如圖8所示。
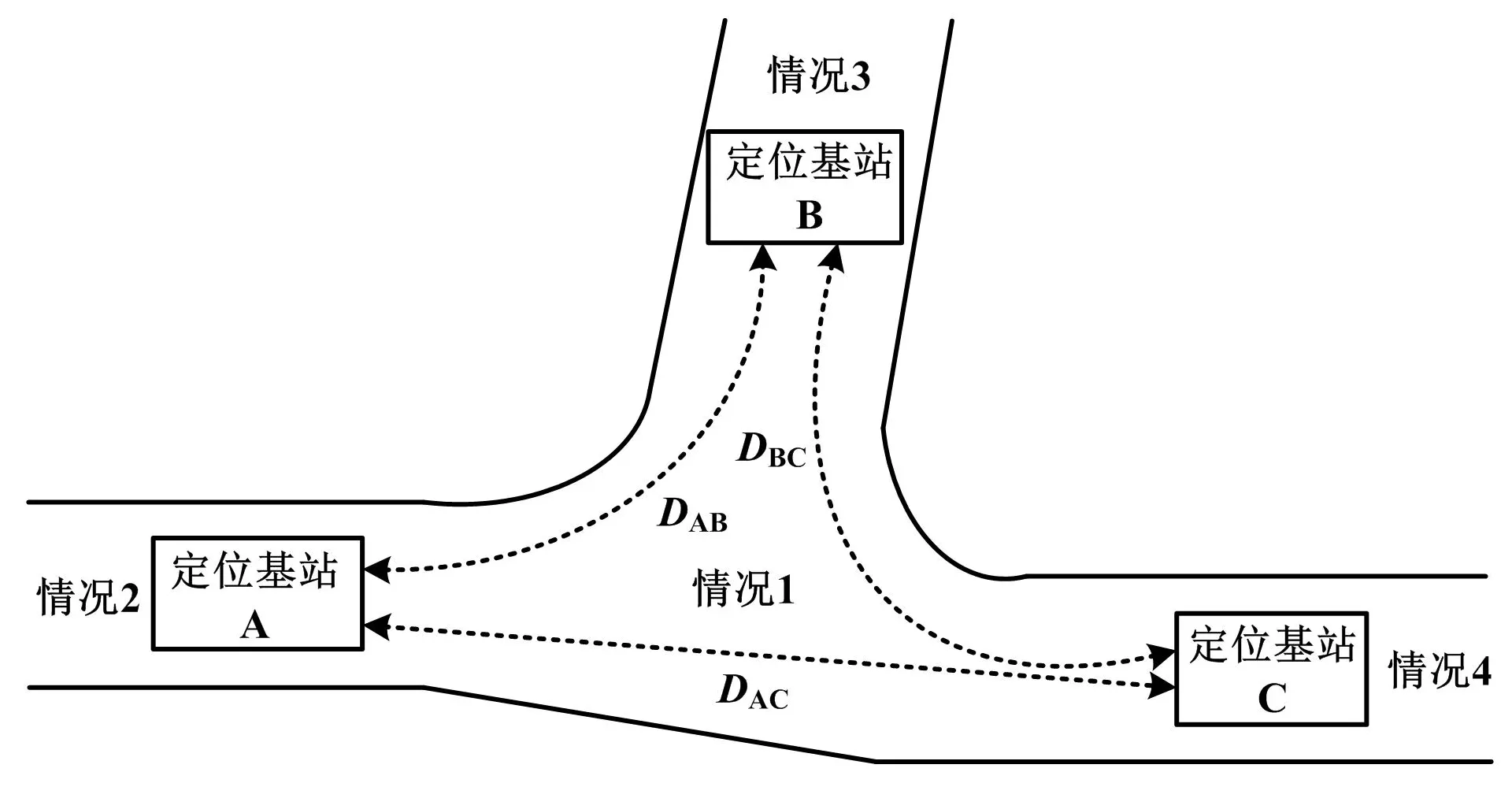
圖8 交叉路口位置分布
采用改進型TOF點對多點測距方法,計算出DA、DB、DC。服務器根據DA、DB、DC和DAB、DBC、DAC,確定定位卡的具體位置,從而實現交叉路口精確定位。
交叉路口定位算法流程如圖9所示。

圖9 交叉路口定位算法流程圖
圖9中,定位卡具體位置存在以下4種情況。
①情況1:定位卡在定位基站A、定位基站B和定位基站C的共同覆蓋區域。
②情況2:定位卡在靠近定位基站A方向的覆蓋區域。
③情況3:定位卡在靠近定位基站B方向的覆蓋區域。
④情況4:定位卡在靠近定位基站C方向的覆蓋區域。
3 試驗測試與結果分析
為驗證線型巷道定位算法和交叉路口定位算法的實際效果,在瓦斯災害應急信息技術國家重點實驗室清水溪實驗巷道內搭建測試平臺。測試平臺如圖10所示。該平臺布置4臺定位基站、30張定位卡;定位基站之間采用光纖連接,采用增益為12 dB的全向天線;天線安置高度約為2 m、距巷道壁約為0.8 m;定位卡均勻地放置在6個測試點,離地面約為1.2 m。
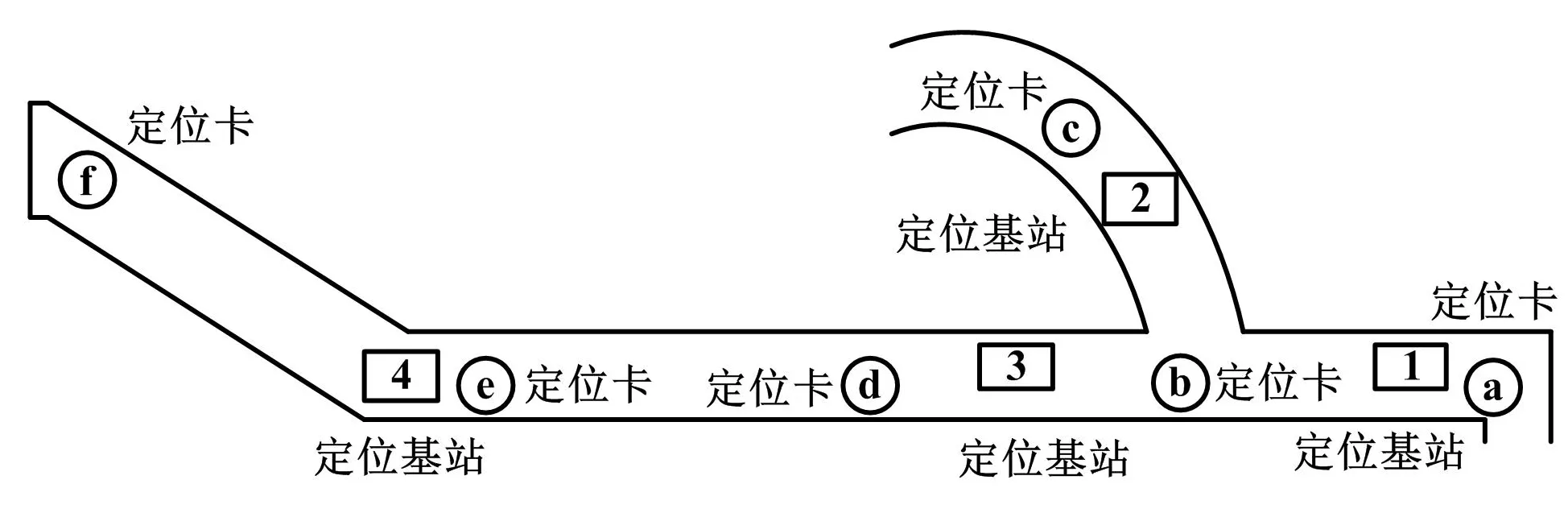
圖10 測試平臺
精確定位測試數據如表1所示。
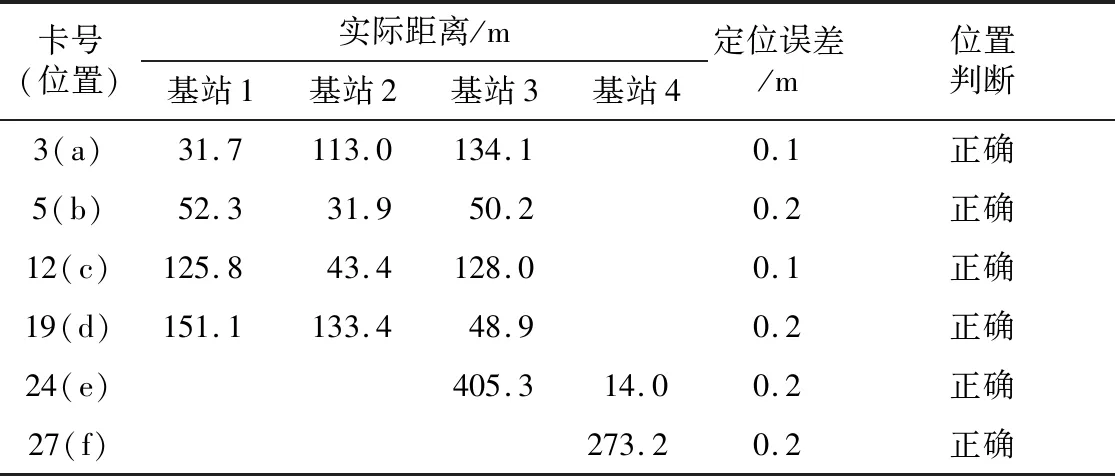
表1 精確定位測試數據
定位基站1~定位基站4之間的距離如下:D12為82.4 m、D13為102.5 m、D23為84.6 m、D34為408.2 m。測試點a與定位基站1之間的距離Da1為31.8 m。測試點b與定位基站1、定位基站2、定位基站3之間的距離Db1為52.2 m、Db2為31.8 m、Db3為50.0 m。測試點c與定位基站2之間的距離DC2為43.5 m。測試點d與定位基站3、定位基站4之間的距離Dd3為48.7 m、Dd4為370.5 m。測試點e與定位基站3、定位基站4之間的距離De3為405.1 m、De4為14.1 m。測試點f與定位基站4之間的距離Df4為273.4 m。在測點a~測點f處分別放置5張定位卡,測試10 min,隨機選取其中6張定位卡的任意定位數據進行分析。
根據表1測試數據結果分析,精確定位誤差小于0.3 m,最大定位距離大于400 m,位置判斷正確。
4 結論
針對礦井現場應用需求,本文提出了一種基于UWB TOF測距的精確定位方法。該方法通過設計系統網絡架構、研究定位基站組網機制,使定位基站之間、定位基站與定位卡之間均無需時鐘同步,大大降低了定位基站和定位卡的復雜度和成本。同時,本文提出一種改進型TOF點對多點測距方法,減少了UWB通信次數,提高了TOF測距效率。根據礦井巷道空間特點,研究巷道線型定位算法和交叉路口定位算法,定位卡與相鄰多個定位基站同時測距,實現礦井巷道精確定位。測試結果表明,UWB精確定位誤差小于0.3 m,最大定位距離大于400 m,位置判斷機制可靠、正確。因此,該系統能夠提供一種安裝便捷、組網靈活和成本較低的精確定位方法,為各種移動目標提供精準定位和位置信息服務,從而滿足智能礦山建設需求。
