基于導軌機器人的重載鐵路鋼桁梁智能巡檢技術研究
2022-09-05 09:05:46鞠曉臣陳令康尹京
鐵道建筑 2022年8期
鞠曉臣 陳令康 尹京
中國鐵道科學研究院集團有限公司鐵道建筑研究所,北京 100081
受地理環境限制,鐵路大量運用了高架橋梁。高架橋梁的日常維護保養以及維修需要做到全面覆蓋,按照檢查制度規定[1]對橋梁進行經常檢查、定期檢查及特殊檢查,對橋面設施和橋梁附屬構造物的狀況進行巡視檢查,包括焊縫裂紋、高強度螺栓斷裂或缺失、鋼架構銹蝕檢查。同時做好巡視檢查記錄,填寫檢查記錄表,及時發現缺損進行維修。目前,采用檢查小車作為檢查平臺,需要工作人員到橋面下面進行檢查,存在三方面的問題:①受惡劣環境影響,檢查時間得不到保證,且以人工目測、測量檢查為主,會出現檢查遺漏或失誤,如緊固件檢查的遺漏;②工作人員安全得不到保障;③對于距離較遠的橋梁或橋梁特殊部位,檢查小車不能到達,工作人員無法接近,不能對橋梁進行全面檢查。為解決上述問題,相繼出現了自動化的車載式橋梁檢測系統,但至今未出現高效、可用于工程實踐的智能自動化橋梁檢測系統[2-5]。
為解決上述人工檢查橋梁存在的問題,本文提出一種導軌機器人,從硬件設計、數據傳輸和供電設計、圖像識別系統、系統平臺設計等方面進行詳細介紹。
1 導軌式巡檢機器人
導軌式巡檢機器人是根據我國橋梁檢測現狀研發并擁有自主知識產權的智能化橋梁檢測系統。該系統采用導軌行走方式,搭載高清視頻設備,針對梁底外觀、結構、缺陷、腐蝕等實時監測,可實現自動化巡檢,遠程人工操作巡檢。導軌機器人包括導軌系統、機器人本體、病害識別系統和管理平臺。導軌系統的功能是為了使機器人能夠順利到達橋梁所需檢查的結構部位,從而能夠拍攝到結構的圖片信息。機器人本體是導軌檢查系統的支承基礎和執行機構,由于其攜帶的傳感器和應用環境不同,本體結構、內部的傳動系統及其基礎功能會有所差異。病害識別系統屬于導軌機器人中的數據處理部分,是實現機器人對橋梁病害進行識別、判斷的關鍵環節,主要包括病害庫的建立、病害識別算法研究以及病害判別標準的確定三部分。管理平臺是導軌機器人的控制部分,實現對機器人動作的控制、監測顯示機器人前端的視頻信息及處理后的數據結果,對有病害發生的情況進行預警。導軌機器人在重載鐵路鋼桁梁進行工程應用,可大幅提高橋梁檢測的精度及工作效率。
2 硬件設計
硬件組件主要包含四部分:承載橫梁、動力裝置、固定組件、檢測設備。橋梁鋼結構上部結構件最大設計質量不超過250 kg。
通過固定組件將承載橫梁連接到橋梁原有的縱梁上,將動力裝置連接到橋梁原有的縱梁和橫梁上,承載橫梁搭載檢測設備依靠縱梁上的動力裝置沿著橋梁縱軸行駛,檢測設備依靠承載橫梁上的動力裝置沿著橋梁橫軸移動,實現橋梁最大化掃描覆蓋。導軌系統設計整體布置見圖1。
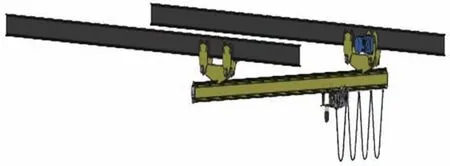
圖1 導軌系統設計整體布置
2.1 承載橫梁
采用Q345qD鋼材定制橫梁,載重50 kg,長度小于9 m,高度約30 cm,形狀為工字形,方便檢測設備固定安裝及移動。
2.2 動力裝置
將動力裝置的電機分別固定在橋梁原有檢修車的縱向軌道及后期安裝的橫向軌道上,縱向軌道驅動裝置為承載橫梁縱向移動提供行進動力,橫向軌道驅動裝置為檢測設備橫向移動提供行進動力。驅動組件大樣見圖2。
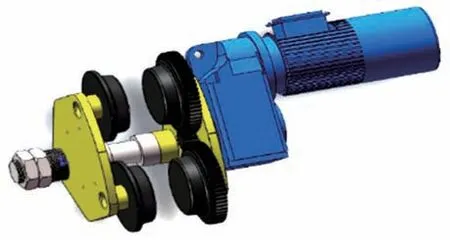
圖2 驅動組件大樣
2.3 固定組件
固定組件起到固定和行進作用,組件分為主動輪和從動輪,又可分為內外包夾輪。將組件內外輪包夾在工字形軌道上,與電機、橫向軌道及檢測設備相連,起到安裝固定作用。固定組件見圖3。
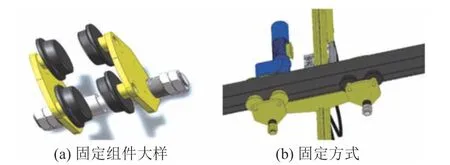
圖3 固定組件
2.4 檢測設備
在承載橫梁安裝可移動平臺,平臺依靠電機進行驅動,實現沿橋梁橫向移動功能。將攝像機安裝在平臺上進行檢測。檢測設備見圖4。
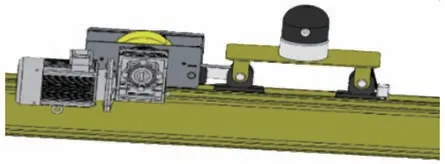
圖4 檢測設備
3 數據傳輸和供電設計
巡檢機器人采用自主無線充電系統,在任務周期內可根據電池電量剩余情況自主返回充電。機器人電量滿電狀態的時間周期為6 h,在滿電狀態下任務執行周期為2 h(根據需求可通過硬件升級提高充電效率縮短充電時長)。數據傳輸系統架構見圖5,供電系統架構見圖6。

圖5 數據傳輸系統架構
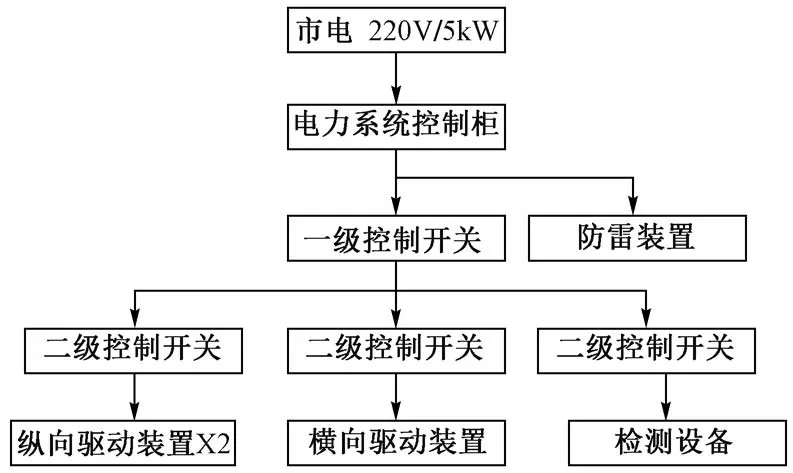
圖6 供電系統架構
4 圖像識別系統
通過深入學習算法,采用分類深度網絡SENet與人眼注意力機制相結合的方法對拍攝圖像進行場景識別;采用Faster-RCNN作為基礎物體檢測框架,對病害區域進行精確定位。提取形狀、灰度、紋理等底層特征,融合深度特征與底層圖像特征進行病害識別,實現鋼桁梁底部桿件銹蝕、螺栓斷裂或缺失等典型病害全天候自動檢測。
5 系統平臺設計
系統平臺屬于機器人系統的控制部分,其主要功能是實現對機器人動作的控制,監測顯示機器人前端的視頻信息及處理后的數據結果,對有病害發生的情況進行預警。系統平臺包括任務管理、巡檢結果確認、巡檢結果分析和用戶設置四部分。
5.1 任務管理
任務管理分為全面巡檢、專項巡檢和手動巡檢。專項巡檢包括(但不限于)螺釘斷裂巡檢,大橋主體結構銹蝕巡檢等。每個子功能模塊集合了任務編制、任務下發等功能。根據不同的巡檢類型自動預先設置相關巡檢點位,并自動生成任務名稱。
1)全面巡檢。將需要檢測的部位(用戶可根據實際情況修改)預設到行進線路內,利用檢測設備對橋梁所有預設部位進行檢查。
2)專項巡檢。在全面巡檢時要重點關注某一方面問題而設定部分側重巡檢路線(如單位側重點或者需要重點檢查的對象)。
3)手動巡檢。自動巡檢與手動巡檢可以自由切換,當切換到手動巡檢后,需要操作人員通過監控截面用鼠標操控機械行進到需要觀察的地方,對目標物體進行人眼觀察識別。
5.2 巡檢結果確認
1)設備告警查詢確認。該模塊功能包括:審核確認設備的實時告警信息,查詢、瀏覽、輸出設備的歷史告警信息,分析設備的告警頻次及告警類型等。
2)巡檢結果瀏覽。①該模塊以結構樹的形式根據巡檢部位進行次序設置,同時按照次序逐點查詢所有巡檢部位的采集信息,并核對、確認這些采集到的信息。②所有巡檢部位信息由全部采集信息和閾值組成,用戶可以通過判斷采集信息得出結果,結果包括兩項:識別正常和識別異常,默認為識別正常。③若結果為識別異常,需填寫實際情況與告警等級并對原始值進行修正,修正值另行保存到審核后的數據表中,不覆蓋機器人自動識別的錯誤的原始數據表,以便比對、分析。④當本次巡檢任務包含的所有點位均確認后,可輸入審核人和審核時間,此時具備生成任務報告條件。
3)巡檢報告生成。該模塊功能包括:生成、查詢、瀏覽、輸出當前巡檢報告和查詢、瀏覽、輸出歷史巡檢報告。①根據時間段和巡檢類型設置查詢條件,顯示相應的歷史任務清單表格。②任務查詢分析具有查詢、重置、導出和查看報告四項功能,分別為:按查詢條件列出任務清單;清空查詢條件;將查詢結果導出為Excel報表,導出報表格式與查詢結果界面相同;查看選中任務清單的任務報告,并導出報告。
5.3 巡檢結果分析
該模塊功能包括:查詢、瀏覽、輸出各巡檢部位任務,分析各設備的巡檢覆蓋情況,并可查詢、瀏覽及審核確認該巡檢任務信息,導出相應的報告。
1)對比分析。該模塊以設備樹的形式瀏覽、對比分析全部巡檢部位的采集信息和識別結果,并生成分析報告。①橫向對比分析:根據設備樹選取多個巡檢部位,左側展示巡檢點位、識別時間和識別結果,右側通過宮格的形式依次展示所選巡檢部位的采集信息,進行橫向對比分析。②豎向對比分析:根據設備樹選取單個巡檢部位,還可查詢該巡檢部位的歷史信息。根據時間段設置查詢條件,左側展示識別時間和識別結果,右側通過宮格的形式按照時間順序展示所選巡檢部位的采集信息,進行豎向對比分析。③篩選展示采集信息的宮格形式,包括單圖、四宮格、六宮格。④巡檢點位的采集信息為圖片信息,顯示該圖片的說明。⑤巡檢點位橫向或豎向對比信息表均可輸出,導出報表格式與查詢結果界面相同。
2)生成報表。①通過時間段、監測類型、識別類型、設備類型、設備區域、設備樹模糊篩選組合設置查詢條件,生成需要的報表內容。②報表的字段可由用戶自由選擇。③報表顯示輸出格式可選擇按時間或點位順序排列。④采集信息為圖片。⑤界面有查詢、重置、導出、按時間排列按鈕,功能分別為:按查詢條件列出數據清單;清空查詢條件;將查詢結果導出為Excel報表,導出報表格式與查詢結果界面相同。當查詢結果為多個時間多個點位時,優先按時間順序排列。
5.4 用戶設置
1)告警閾值設置。告警閾值設置實現了設備巡檢和系統自檢信息告警閾值的設定,該界面僅對管理員開放。①預警就是對未達到缺陷程度的信息進行預告,提醒用戶注意。②對各巡檢點位的閾值設置,應滿足運維需要。③告警值應按照同類設備類別模型批量自動設置,并能根據需要對單個設備報警閾值進行手動調整。④閾值上下限按照識別類型的不同分別填寫數值或百分比。
2)告警消息訂閱設置。告警消息訂閱設置實現短信提醒設定,消息可按告警類型、發送時間、發送頻率進行選擇設置。該功能僅對管理員開放。短信提醒格式:告警時間+點位名稱+識別結果。系統應具備此功能,各公司根據自身條件及需要進行選擇。
3)權限管理。權限管理實現對組織人員以及權限的設置,分為組織人員、權限設置兩個子菜單。①組織人員可進行用戶的添加、刪除、修改(登錄名、密碼等)等操作,主要包括登錄名、登陸密碼、用戶權限、綁定手機號、短信提醒功能開關、登錄IP、最后登錄時間、操作、備注。②權限設置。權限分為普通用戶、管理員。普通用戶可進行使用任務管理、設備告警查詢等模塊的功能。管理員在普通用戶基礎上,可進行用戶設置模塊的功能維護以及系統各模塊、功能的全面編制和修改。用戶登錄后如果30 min未進行任務操作,則自動退出登錄。
4)巡檢點位設置。巡檢點位設置可實現對巡檢點位按設備類型導入、新增、修改、刪除等功能。該界面僅對管理員開放。
6 結論
本文提出的應用于重載鐵路鋼桁梁的導軌機器人,可實現鋼桁梁底部桿件銹蝕、螺栓斷裂或缺失等典型病害全天候自動檢測,遠程人工操作巡檢,與傳統鋼桁梁人工巡檢相比,更能滿足橋梁巡檢向智能化發展的實際需求,是橋梁智能化無人巡檢技術的發展趨勢,擁有廣闊的應用前景。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少先隊活動(2021年4期)2021-07-23 01:46:22
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
電子制作(2018年11期)2018-08-04 03:26:08
山東工業技術(2016年15期)2016-12-01 05:31:04
工業設計(2016年12期)2016-04-16 02:52:00
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
消費者報道(2014年7期)2014-07-31 11:23:57
