雷達網情報信息按需分發方法研究*
2022-09-06 08:57:12李鵬飛遲文君
艦船電子工程 2022年7期
魯 軍 李鵬飛 遲文君
(陸軍炮兵防空兵學院鄭州校區 鄭州 450000)
1 引言
信息化戰爭條件下,實時、動態地掌握戰場態勢,并將情報信息及時按需地發送到各個作戰單元,對于奪取信息優勢、打贏信息化戰爭是至關重要的。防空作戰中,情報信息是指揮員進行作戰指揮的基本依據,也是奪取戰場主動權的前提條件。復雜戰場條件下,敵通常采取小編隊、多批次、強干擾、多方向對我方保衛目標進行攻擊,由于雷達受到地球曲率、地物遮蔽、地雜波、電磁干擾的影響,使得雷達準確獲取空中目標信息的難度進一步加大。假如雷達站能夠獲得空中目標綜合空情輔助信息,就能提升雷達發現目標的能力。雷達組網能夠實現全天候、多空域的對空偵察,獲取目標信息,并實時上報雷達空情,使得空情融合處理中心接收與處理的目標信息多達幾百批。面對大量的綜合空情,情報人員難以快速、準確的空情分發。因此,必須要利用輔助決策手段,實現“人在回路”的人機協同情報信息按需分發,增強空情分發的實時性、準確性與針對性。通過將綜合空情按需分發給雷達站,能夠增強空情錄取能力和錄取精度,發揮雷達網協同偵察的優勢。
2 雷達網情報信息分發的流程
情報信息優勢是未來信息化防空作戰決策優勢和行動優勢的前提,是取得防空抗擊作戰的關鍵[1]。在戰場通信資源有限的情況下,應當根據雷達站的實際需要,有選擇地將情報信息發送給各雷達站,實現情報信息的按需分發、精準分發,能夠避免雷達站的“信息過載”和減輕通信傳輸壓力,提升空情資源對雷達發現目標的輔助作用。在防空作戰中,對于雷達站而言空中目標是否為探測的重要目標,取決于目標對保衛目標的威脅程度。而目標是否對保衛目標造成威脅,需要用門限對目標威脅度的大小進行判別,即與閾值k比較。當目標的威脅值大于設定的閾值時(W>k)可判定該批目標對保衛目標有威脅,也即為雷達需要重點關注的目標。當目標的威脅值小于設定的閾值時(W≤k),該批目標對保衛目標不造成威脅,也就是雷達不需要重點關注的目標,不需要重點探測。情報信息的按需分發不僅要考慮空中目標的威脅性,也要考慮其是否在雷達站的預警范圍之內。通過將空中目標和雷達的相對距離與雷達預警半徑r進行門限比較,可以判定其是否在雷達預警范圍內。對于不在雷達站預警范圍之內的目標信息,雷達站是不用過多關注的,這些信息也不需要發送到雷達站。因此,構建以雷達預警范圍為依據的情報信息需求模型,然后以雷達的情報信息需求模型與空中目標的威脅估計值進行動態匹配,最后實現對情報信息的按需分發,其流程如圖1所示。
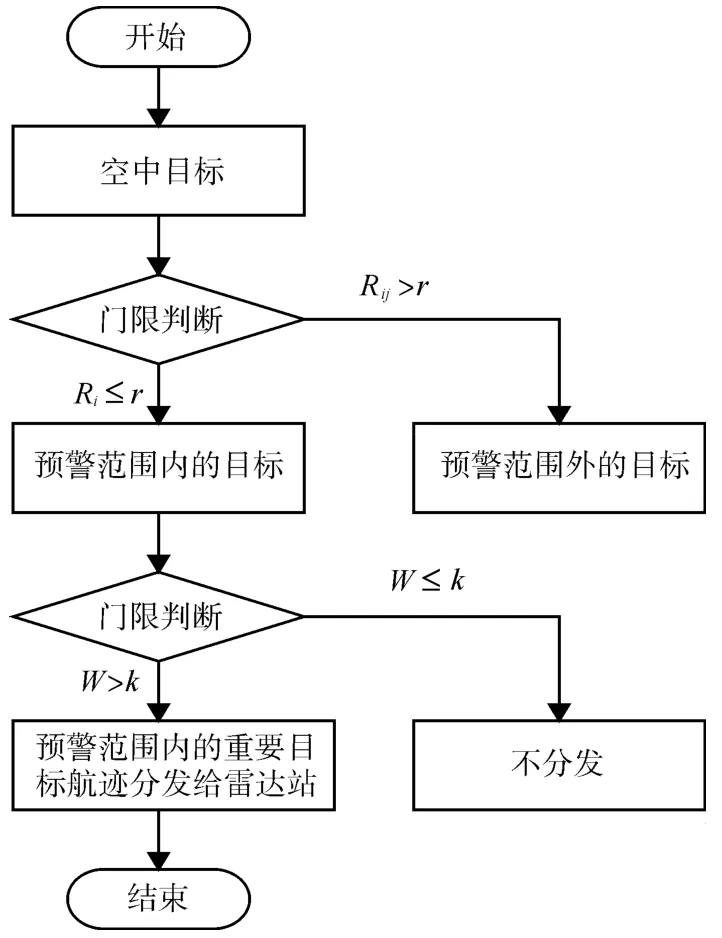
圖1 雷達網情報信息分發流程圖
3 雷達網情報信息分發的數學模型
3.1 雷達預警范圍估計模型
假設p時刻第i部雷達站的位置為(Xi,Yi,Zi),空中第j批目標的坐標為(Xj,Yj,Zj),則雷達i與目標j之間的相對距離為

式中:i=1,2,3,…,N,N為雷達網中雷達數量;j=1,2,3,…,M,M為空中目標數量。
雷達網中各雷達的探測距離通常由雷達通視距離與最大作用距離所決定,雷達對空中目標的最大探測距離可以用以下公式表示[2~3]:

式中:Rs為雷達的通視距離,Rmax為雷達的最大作用距離。
1)雷達的通視距離Rs可以表示為

式中:h為雷達天線高度,H為空中目標飛行高度。
2)雷達的最大作用距離Rmax可以表示為

式中:Pt為雷達的發射功率;Gt為發射天線的增益;Gr為接收天線的增益;λ為雷達作波長;σ為雷達反射截面積;K為玻爾茲曼常數;T0為標準室溫;Bn為接收機噪聲帶寬;Fn為接收機噪聲系數;(SN)min為最小可檢測信噪比。
雷達網各雷達站的預警范圍可定義為:需要提前預警的探測空域,即在雷達的探測范圍向外延伸一定的距離,其值通常由雷達的最大探測距離與預警時間對應的航程等確定。其表達方式為

式中:r表示雷達預警半徑;Dmax表示雷達的最大作用距離;v表示空中目標的飛行速度;ti表示融合處理中心到雷達站的情報信息傳播時延;tj表示雷達站雷達操作手反應時間。通過雷達與空中目標的相對距離Rij與雷達預警半徑r作比較,判斷目標是否在該雷達的預警范圍內。
3.2 空中目標威脅估計模型
信息化戰爭條件下,戰場環境復雜、來襲兵器多元,戰場情報信息通常具有較大的模糊性與動態性。影響空中目標威脅大小的因素較多,但這些影響因素一般只能用模糊語言進行描述,其威脅度的分析、判斷需要利用灰色理論、模糊數學等進行建模[4]。目前,關于目標威脅估計的方法主要有模糊綜合決策法[5~7]、貝葉斯推理[8]、灰度關聯決策[9]等。本文針對雷達網空情按需分發,綜合雷達網的情報信息,以保衛目標為中心,將空中目標威脅估計參數確立為相對距離、飛行高度、飛行速度、航向角、目標類型,運用模糊理論與層次分析法對空中目標進行威脅估計。基本步驟是:首先進行參數威脅度估計;然后進行參數權重確立;最后計算空中目標綜合威脅估計值。
3.2.1 空中目標威脅估計參數隸屬度
模糊數學于1965年由美國控制論專家L.A.扎德(L.A.Zadeh)首次提出,將數學的應用范圍從精確現象拓展到模糊現象,并在隨后的40多年得到廣泛地發展與應用[11]。采用模糊理論方法對空中目標威脅估計參數進行描述并確立以下規則[6,10]:若空中目標處于某一屬性參數的攻擊力最小時,則認為其目標威脅值也是最小值,設其評判函數值為0;若空中目標處于某一屬性參數的攻擊力最大時,則其目標威脅值也是最大值,設其評判函數值為1;當威脅估計參數為其他狀態時,其評判函數值處于0~1之間。
1)相對距離威脅度函數
空中目標的相對距離威脅程度與相對距離的大小為遞減關系,如圖2所示為目標威脅程度隨相對距離變化的關系。
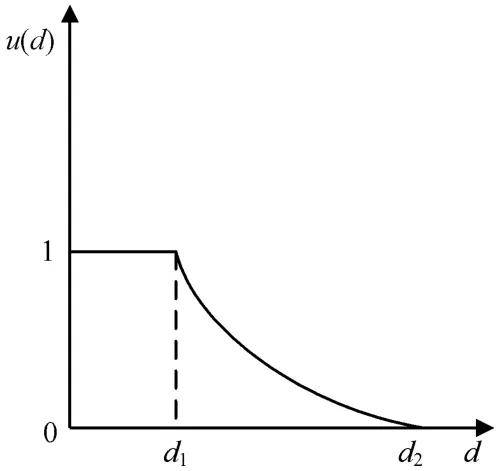
圖2 相對距離與目標威脅度的關系
當空中目標距離保衛目標越大時其威脅越小,當空中目標與保衛目標距離增大至一定范圍,即d>d2時,則可認為該目標對保衛目標不構成威脅,設其威脅值為0;當襲目標與保衛目標距離減小至一定范圍時威脅值最大,即d<d1時,設其威脅值為1。因此,可以得到以相對距離為參數的威脅度隸屬度函數:

式中:d1、d2分別表示為空中目標對保衛目標造成威脅的最小距離與最大距離。
2)飛行高度威脅度函數
空中目標的距離威脅程度與飛行高度的大小也為遞減關系,如圖3所示為目標威脅程度隨飛行高度變化的關系。
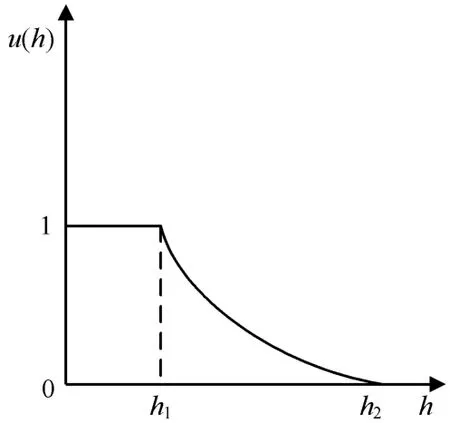
圖3 飛行高度與目標威脅度的關系
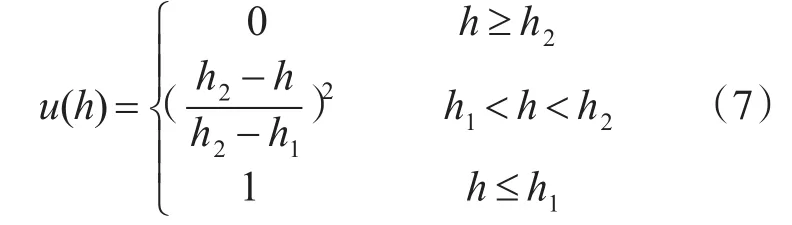
當空中目標飛行高度越高時對保衛目標威脅越小,飛行高度越低時其威脅越大。因此,可以得到以飛行高度為參數的威脅度隸屬度函數:
3)飛行速度威脅度函數
空中目標的威脅程度與飛行速度的大小為遞增關系。如圖4所示為目標威脅程度隨目標飛行速度變化的關系。
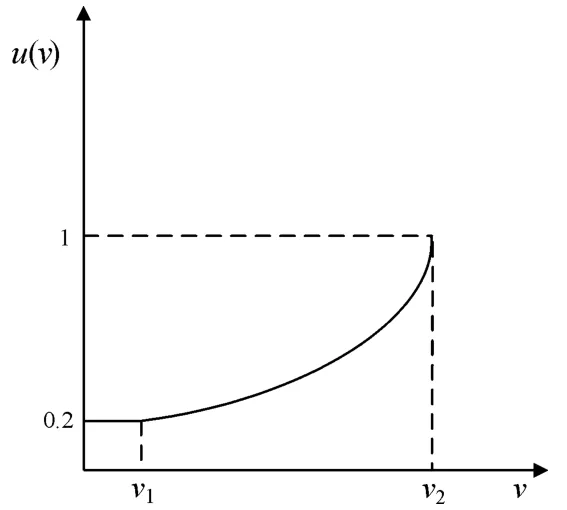
圖4 飛行速度與目標威脅度的關系
當空中目標飛行速度越大時,飛臨我方陣地的時間就越短,對保衛目標威脅越大;當目標飛行速度越小時,對保衛目標威脅就越小,將其最小值量化為0.2。飛行速度為參數的威脅度隸屬度函數:

式中:v1、v2分別表示為空中目標對保衛目標造成威脅的最小飛行速度與最大飛行速度。
4)目標航向角威脅度函數
目標航向角體現了空中目標的意圖,即是否會攻擊保衛目標,如臨近、離遠狀態。如圖5所示為空中目標與目標威脅度之間的關系。
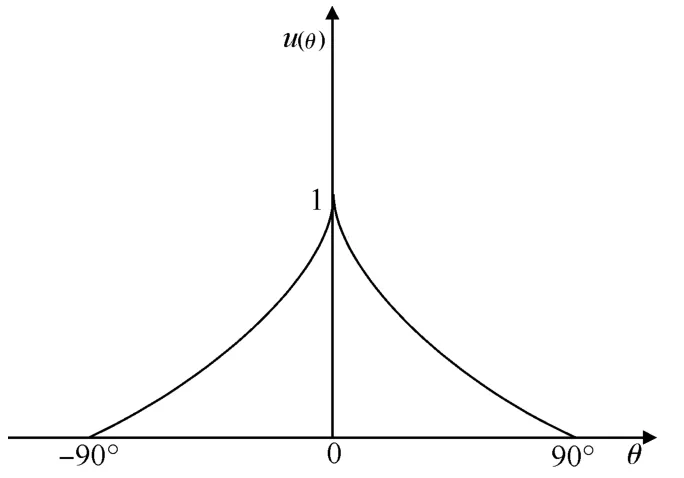
圖5 航向角與目標威脅度的關系
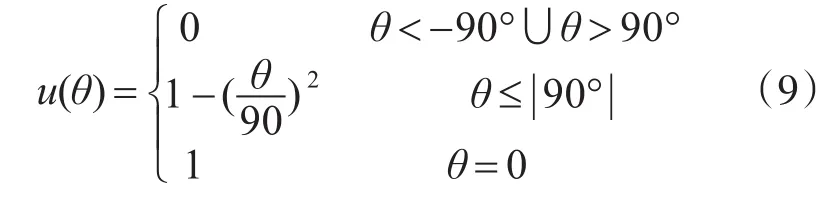
當航向角處于|90°|之內時,空中目標飛行狀態為臨近飛行,對保衛目標造成威脅;當航向角在|90°|之外時,飛行狀態為離遠飛行,對保衛目標基本不構成威脅。航向角為參數的威脅度隸屬度函數:
5)目標類型威脅度函數
①傳染病可疑癥狀整合不足,疾病早期甄別能力有限。我國目前的癥狀監測一方面依托發熱門診為主進行流感樣病例監測[9],另一方面是以腸道門診為主的感染性腹瀉癥狀監測[9-10],但仍缺乏針對皮疹、出血、黃疸、結膜出血等癥狀的監測,對傳染病可疑癥狀的系統整合以及疾病早期的甄別能力存在不足。
不同的類型的空中目標對保衛目標造成的威脅是不同的。通過專家評估系統可得到不同類型空中目標的威脅度隸屬函數u(g),將其定義為0~1之間,如表1所示。
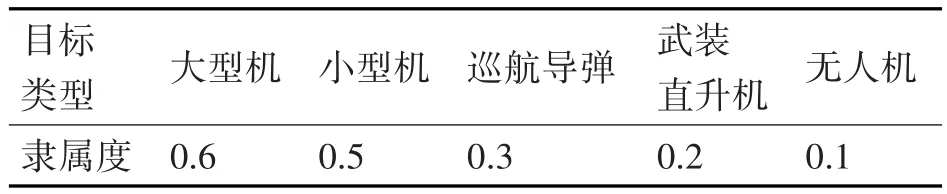
表1 空中目標類型隸屬度
3.2.2 空中目標威脅估計參數權重
空中目標不同的威脅估計參數對保衛目標造成的威脅不同,需要對其影響保衛目標安全的威脅權重進行確定,即計算各個參數加權因子W=(w1,w2,…,wn)。層次分析法(The Analytic Hierarchy Process,AHP)是在20世紀70年代初由美國教授薩蒂(T.L.Saaty)提出來的,是一種定性和定量相結合的、層次化的、系統化的科學方法,能夠很好地解決權重分配問題。文獻[6]與文獻[12]均利用層次分析法進行權重分配研究,結果表明,該方法在結合模糊理論的情況下,得到較好的目標威脅估計值。首先,通過構建目標威脅度判斷矩陣,將威脅估計參數對于目標威脅度的相對重要性,進行兩兩比較,能夠得出準確度較高的定量分析。然后,計算得出目標威脅度的權重大小,通過一致性檢驗。定義一致性指標為

式中:λmax為判斷矩陣的最大特征根,n為參數的個數。
為了衡量一致性指標CI的大小,采用隨機一致性指標RI與其進行比較,定義一致性比率為

3.2.3 空中目標綜合威脅估計
在空中目標威脅估計參數的隸屬度函數與權重確立以后,利用線性加權求和的方法將目標的威脅估計參數的權重分別乘以對應的威脅度,再進行求和,即可得到空中目標相對于保衛目標的綜合威脅估計值:
4 仿真分析
假設我方保衛目標為Z,保衛目標附近部署兩部雷達,分別為雷達A站、雷達B站,主要負責偵察預警。通過雷達網融合處理中心綜合多源空情,現已發現5批目標。通過分析,空中目標的狀態信息、目標威脅參數信息如表2、3所示。

表2 空中目標狀態信息
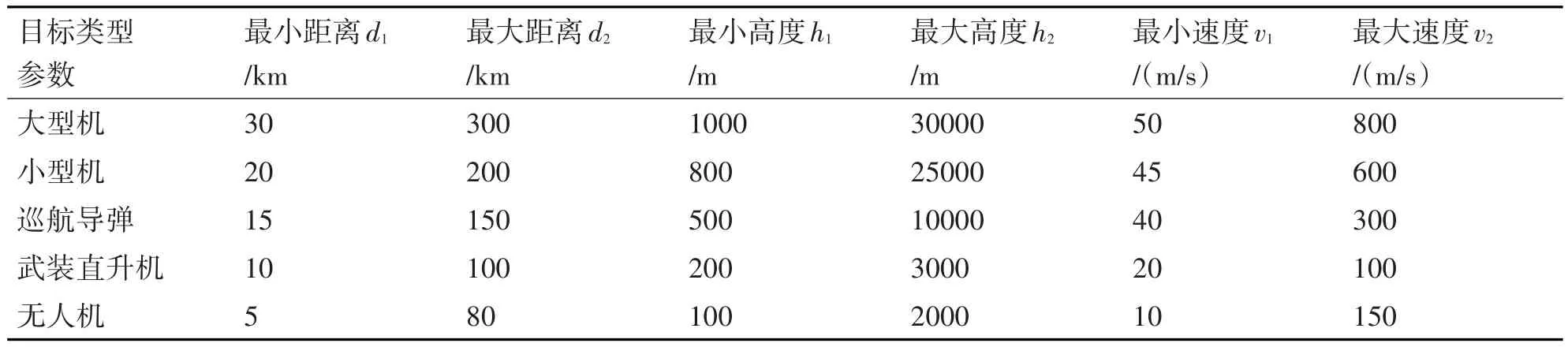
表3 空中目標威脅參數信息
設空中目標的威脅估計參數為目標類型(C1)、相對距離(C2)、飛行速度(C3)、飛行高度(C4)、航向角(C5),依據專家估計并結合層次分析法的參數重要性標度,可得到空中目標威脅參數的重要性判斷矩陣為

通過該判斷矩陣計算可知λmax=5.2298,即可得到CR=0.051<0.1,通過一致性檢驗。計算判斷矩陣歸一化的特征向量作為矩陣的權向量w=[0.0604,0.1282,0.4046,0.3011,0.1056]T。然后,對空中目標威脅度進行綜合估計可得到各目標的威脅度。
假定雷達A站的最大探測距離為200km,雷達B站的最大探測距離為50km,空中目標的飛行速度為800m/s,雷達操作手反應時間與空情傳播時延的總時間為60s。取目標綜合威脅度閾值K=0.57,通過兩次情報信息篩選后,將目標M2、M3、M4的航跡信息分發給雷達A站,目標M3、M4的航跡信息分發給雷達B站。
5 結語
本文針對復雜戰場條件下,雷達受到地球曲率、地物遮蔽、地雜波、電磁干擾影響,難以快速發現空中目標的問題,提出了一種雷達網情報信息按需分發的方法。首先基于雷達最大探測距離構建了雷達預警范圍估計模型;其次利用模糊理論與層次分析法構建了空中目標的威脅估計模型;然后通過兩次門限判斷完成了空中目標的篩選,確定分配給各雷達站的目標信息,經過仿真驗證了該方法的可行性。通過雷達網情報信息按需分發,可為雷達站提供精準的目標指示,輔助雷達操作手從復雜回波中快速甄別與準確錄取目標,發揮情報信息的共享優勢,增強雷達網體系作戰效能。
