一種自適應(yīng)動(dòng)態(tài)軟傳感器智能化建模方法*
2022-09-06 08:57:34曲華超孟凡強(qiáng)趙成斌
艦船電子工程 2022年7期
曲華超 孟凡強(qiáng) 趙成斌
(1.中國(guó)人民解放軍92667部隊(duì) 青島 266102)(2.中國(guó)人民解放軍91206部隊(duì) 青島 266108)
1 引言
流程工業(yè)過(guò)程中存在一類直接關(guān)系到產(chǎn)品質(zhì)量與等級(jí)的關(guān)鍵參數(shù),無(wú)法通過(guò)常規(guī)傳感器測(cè)量,而是通過(guò)離線實(shí)驗(yàn)室分析或在線分析儀表的方式進(jìn)行測(cè)量。然而,實(shí)驗(yàn)室分析導(dǎo)致長(zhǎng)達(dá)數(shù)小時(shí)的測(cè)量滯后;分析儀表價(jià)格昂貴,也需要頻繁與周期性地維護(hù)[1]。另一方面,《中國(guó)制造2025》戰(zhàn)略規(guī)劃制定了綠色、高效、高質(zhì)的發(fā)展目標(biāo),而巨大的測(cè)量滯后以及高昂的投資和維護(hù)費(fèi)用嚴(yán)重影響了流程企業(yè)的產(chǎn)品質(zhì)量以及成本,給當(dāng)前流程工業(yè)智能化轉(zhuǎn)型升級(jí)帶來(lái)了極大的挑戰(zhàn)[2]。
相對(duì)于上述兩種“硬”測(cè)量方式,人工智能驅(qū)動(dòng)的軟傳感器具有無(wú)測(cè)量滯后、易維護(hù)、投資和維護(hù)成本低等優(yōu)點(diǎn),成為關(guān)鍵參數(shù)虛擬測(cè)量的有效手段,也是我國(guó)流程工業(yè)實(shí)現(xiàn)跨越式發(fā)展的一項(xiàng)必備技術(shù)[3]。軟傳感器的本質(zhì)為具有預(yù)測(cè)功能的數(shù)學(xué)模型,以容易測(cè)量的輔助參數(shù)(如溫度、壓力、流量等)為輸入,對(duì)關(guān)鍵參數(shù)進(jìn)行估計(jì)。因此,軟傳感器模型的建立是軟傳感器技術(shù)的核心部分。然而,流程工業(yè)過(guò)程呈現(xiàn)出十分復(fù)雜的特性。例如,長(zhǎng)流程、大時(shí)間常數(shù)導(dǎo)致過(guò)程呈現(xiàn)復(fù)雜的非線性與動(dòng)態(tài)特性,輔助參數(shù)與關(guān)鍵參數(shù)間存在很大的時(shí)延;過(guò)程內(nèi)外部的變化因素(如原料變化、工況變化、催化劑活性降低、機(jī)械結(jié)構(gòu)磨損等)導(dǎo)致過(guò)程呈現(xiàn)明顯的時(shí)變特性[4]。傳統(tǒng)的軟傳感器建模方法大多考慮單一的數(shù)據(jù)特性。例如,基于核學(xué)習(xí)的方法(如支持向量機(jī))和神經(jīng)網(wǎng)絡(luò)的方法僅考慮非線性特性;基于動(dòng)態(tài)偏最小二乘(Dynamic Partial Least Squares,DPLS)僅能考慮動(dòng)態(tài)特性。雖然最近成為研究熱點(diǎn)的動(dòng)態(tài)神經(jīng)網(wǎng)絡(luò)(如循環(huán)神經(jīng)網(wǎng)絡(luò)、長(zhǎng)短時(shí)記憶單元)等能同時(shí)考慮非線性與動(dòng)態(tài)特性,但這些方法忽略了輔助參數(shù)的時(shí)延,也難以處理時(shí)變特性,而且其可解釋性與可靠性等問題仍未得到很好地解決,導(dǎo)致預(yù)測(cè)精度難以得到保障,且性能逐漸惡化[5]。
解決時(shí)變問題的方法主要有三類,即遞推方法、即時(shí)學(xué)習(xí)方法以及滑動(dòng)時(shí)間窗方法。其中,滑動(dòng)時(shí)間窗方法相對(duì)于前兩類方法既具備非線性處理能力,又可以避免測(cè)量噪聲與離群數(shù)據(jù)引起的相似樣本選擇錯(cuò)誤等不足,因此能夠同時(shí)處理非線性與時(shí)變問題。然而,目前基于滑動(dòng)時(shí)間窗的軟傳感器建模方法多為靜態(tài)方法,忽略了過(guò)程的動(dòng)態(tài)特性,而且并未系統(tǒng)性解決輔助參數(shù)的時(shí)延問題,導(dǎo)致模型預(yù)測(cè)泛化能力不高且容易在局部出現(xiàn)很大的預(yù)測(cè)誤差,難以滿足高標(biāo)準(zhǔn)的監(jiān)測(cè)、控制與優(yōu)化等任務(wù)。
鑒于此,本文提出一種基于人工智能技術(shù)的智能化自適應(yīng)動(dòng)態(tài)軟傳感器建模方法,同時(shí)解決復(fù)雜工業(yè)過(guò)程的動(dòng)態(tài)、非線性與時(shí)變問題,從而提升軟傳感器的預(yù)測(cè)精度與可靠性。具體來(lái)說(shuō),以滑動(dòng)時(shí)間窗框架為基礎(chǔ),以DPLS模型建立局部動(dòng)態(tài)模型;同時(shí),將參數(shù)選擇問題轉(zhuǎn)化為整數(shù)規(guī)劃問題,進(jìn)而選擇差分進(jìn)化算法(Differential Evolution,DE)求解優(yōu)化問題,不僅減少了手動(dòng)建模復(fù)雜,而且使得到的結(jié)果更具客觀性與最優(yōu)性。
2 動(dòng)態(tài)偏最小二乘算法[6]
將m維輔助參數(shù)與p維關(guān)鍵參數(shù)分別表示為x=(x1,…,xm)T與y=(y1,…,yp)T,第i個(gè)輔助參數(shù)和第j個(gè)關(guān)鍵參數(shù)在t時(shí)刻的采樣值分別表示為xi(t)與yj(t)。考慮到時(shí)延與動(dòng)態(tài)特性,可將DPLS模型的輸入數(shù)據(jù)矩陣和輸出數(shù)據(jù)矩陣分別表示為
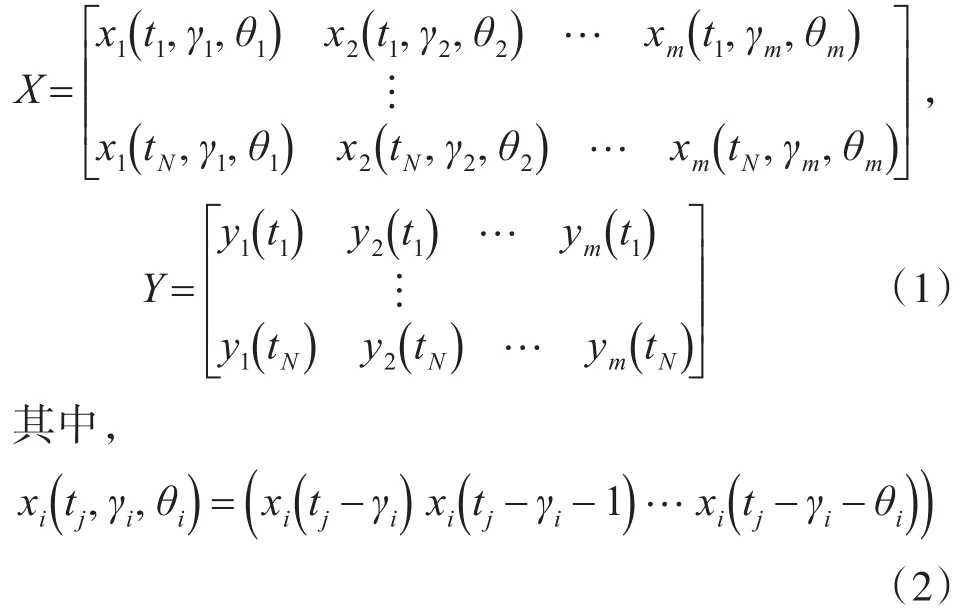
γi和θi分別表示第i個(gè)輔助參數(shù)xi的時(shí)延起始時(shí)刻和終止時(shí)刻,t1,t2,…,tN表示關(guān)鍵參數(shù)的采樣時(shí)刻。
DPLS對(duì)數(shù)據(jù)矩陣進(jìn)行如下分解:

其中,T和U分別為X和Y的得分矩陣,P和Q分別為X和Y的負(fù)荷矩陣,EX和EY分別為X和Y的矩陣殘差矩陣。
此外,X和Y的外部關(guān)系表示為

其中B=diag(b1b2…bK)為回歸系數(shù)(對(duì)角)矩陣。
在DPLS中,輸入和輸出之間的數(shù)學(xué)關(guān)系可表示為[7]

一種廣泛采用的PLS算法是“非線性迭代PLS算法”,詳細(xì)步驟可參考文獻(xiàn)[8]。
在線預(yù)測(cè)階段,關(guān)鍵參數(shù)在某時(shí)刻t的估計(jì)值可按下式計(jì)算:

式中xi(t,γi,θi) 按式(2)計(jì)算,表示關(guān)鍵參數(shù)的均值向量。
3 智能化的自適應(yīng)動(dòng)態(tài)軟傳感器建模方法
3.1 滑動(dòng)時(shí)間窗DPLS模型
滑動(dòng)時(shí)間窗DPLS模型(Moving time window PLS,MTW-DPLS)的示意圖如圖1所示,其中滑動(dòng)窗的長(zhǎng)度記為W,即每次獲得新的有標(biāo)簽樣本后,選擇最新的W個(gè)有標(biāo)簽樣本建立DPLS模型,對(duì)未知數(shù)據(jù)(藍(lán)色虛線表示的部分)進(jìn)行預(yù)測(cè),直到獲得下一個(gè)有標(biāo)簽樣本。
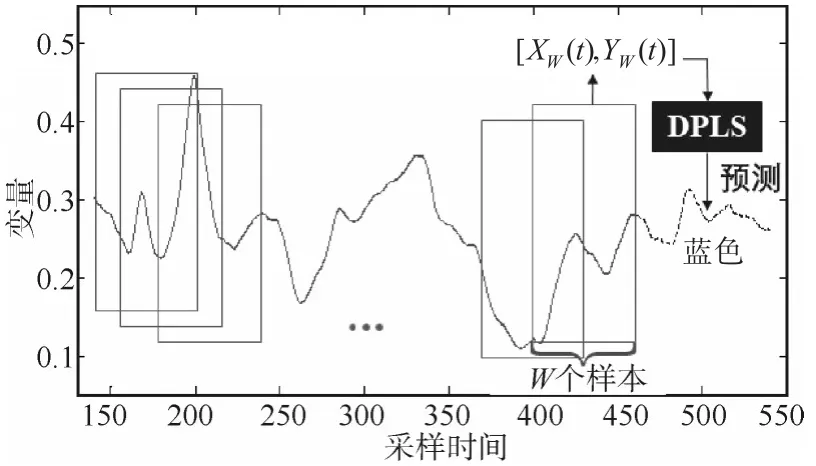
圖1 基于滑動(dòng)時(shí)間窗的DPLS模型示意圖
具體來(lái)說(shuō),將最新的有標(biāo)簽樣本的采樣時(shí)刻記為t。考慮到時(shí)延與動(dòng)態(tài)特性,最新的滑動(dòng)窗內(nèi)的輸入數(shù)據(jù)矩陣XW(t)和輸出數(shù)據(jù)矩陣YW(t)按照如下形式構(gòu)造:
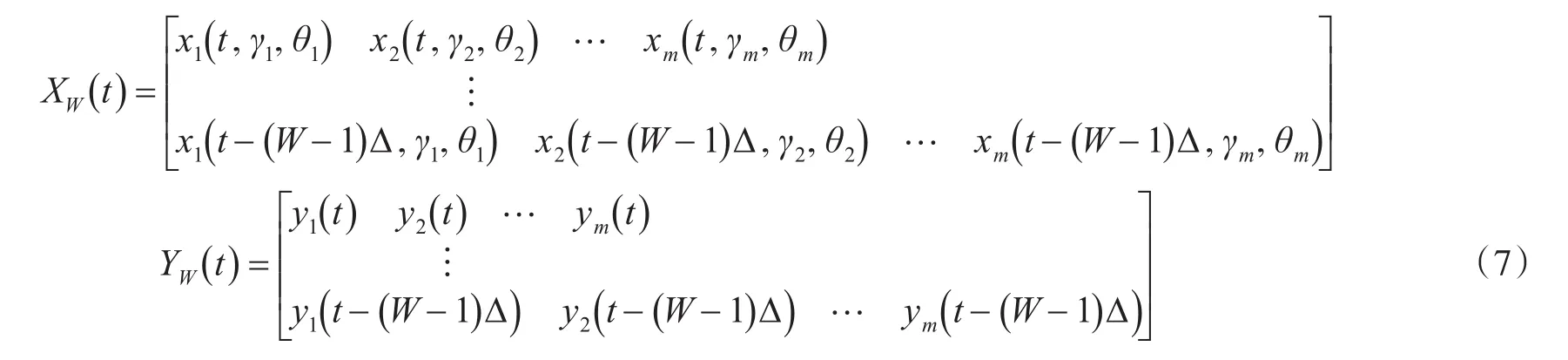
式中 Δ 表示關(guān)鍵參數(shù)的采樣周期,xi(t,γi,θi)按式(2)構(gòu)建。
然后,在XW(t)和YW(t)上實(shí)施PLS算法,即可構(gòu)建DPLS模型,可用于解決過(guò)程的動(dòng)態(tài)特性。同時(shí),PLS算法能夠有效處理由數(shù)據(jù)增廣引起的高維特性,并同時(shí)提取輔助參數(shù)內(nèi)部、關(guān)鍵參數(shù)內(nèi)部以及輔助參數(shù)與關(guān)鍵參數(shù)之間的相關(guān)性。此外,滑動(dòng)窗技術(shù)是一種局部化的自適應(yīng)建模方法,能夠有效地解決過(guò)程的非線性與時(shí)變問題。
3.2 基于差分進(jìn)化算法的智能參數(shù)優(yōu)化方法
在MTW-DPLS中需要確定的參數(shù)包括滑動(dòng)窗口長(zhǎng)度W、PLS算法的主元數(shù)量K、時(shí)延參數(shù)γ={γ1,γ2,…,γm}與θ={θ1,θ2,…,θm}。手動(dòng)確定這些參數(shù)幾乎不可能。為此,本文進(jìn)一步提出基于DE的參數(shù)優(yōu)化方法[9]。首先,將歷史數(shù)據(jù)集劃分為訓(xùn)練集和校驗(yàn)集,其中,訓(xùn)練集的數(shù)據(jù)長(zhǎng)度為W的上限,校驗(yàn)集用來(lái)計(jì)算適應(yīng)度函數(shù)。然后,采用DE算法,選擇能夠使適應(yīng)度函數(shù)最小的一組W、K、γ和θ:

式中,Xv和Yv分別為校驗(yàn)樣本的輸入和輸出數(shù)據(jù)矩陣,f(·)定義為在校驗(yàn)樣本集上的均方根誤差(Root Mean Squares Error,RMSE)。
上述采用DE智能優(yōu)化MTW-DPLS模型參數(shù)的方法簡(jiǎn)記為DE-MTW-DPLS。
3.3 基于DE-MTW-DPLS建立軟傳感器模型的流程
基于DE-MTW-DPLS建立軟傳感器模型的流程闡述如下。
1)離線階段
初始化:設(shè)定{K,W,γ,θ}的上、下界;隨機(jī)初始化DE的染色體;將歷史數(shù)據(jù)劃分為訓(xùn)練集與校驗(yàn)集。
步驟(一):執(zhí)行DE的變異與交叉操作;根據(jù)其中一條染色體中的時(shí)延參數(shù)γ,θ,對(duì)訓(xùn)練集和校驗(yàn)集按照式(7)進(jìn)行增廣。
步驟(二):在增廣后的數(shù)據(jù)上在訓(xùn)練集上建立“最新的”DPLS模型。
步驟(三):利用所建立的DPLS模型對(duì)下一時(shí)刻的樣本進(jìn)行預(yù)測(cè),獲得預(yù)測(cè)誤差;
步驟(四):向前移動(dòng)一個(gè)樣本,獲得新的滑動(dòng)數(shù)據(jù)集,并建立DPLS模型,返回步驟(五),直至遍歷所有校驗(yàn)樣本;
步驟(五):計(jì)算DE各染色體對(duì)應(yīng)的適應(yīng)度函數(shù);
步驟(六):執(zhí)行DE的選擇操作,并返回步驟(一),直至遍歷所有染色體;
步驟(七):當(dāng)?shù)竭_(dá)最大代數(shù)或適應(yīng)度變化率小于設(shè)定閾值,停止迭代。
2)在線階段
步驟(一):根據(jù)優(yōu)化好的時(shí)延參數(shù)γ*,θ*對(duì)最新的W*個(gè)樣本進(jìn)行增廣,獲得滑動(dòng)窗數(shù)據(jù)矩陣XW(t)和YW(t);
步驟(二):在XW(t)和YW(t)上利用PLS算法建立DPLS模型fDPLS(·),其中,主成分?jǐn)?shù)量由K*給出;
步驟(三):當(dāng)對(duì)某未知樣本記xq進(jìn)行預(yù)測(cè)時(shí),利用γ*,θ*對(duì)xq進(jìn)行增廣,然后調(diào)用fDPLS(·),根據(jù)式(6)完成預(yù)測(cè)任務(wù);
步驟(四):當(dāng)獲得有標(biāo)簽樣本時(shí),對(duì)該樣本利用γ*,θ*進(jìn)行增廣,然后,向前移動(dòng)滑動(dòng)窗,獲得最新的XW(t)和YW(t),并返回步驟(二)。
4 應(yīng)用驗(yàn)證
本節(jié)采用一個(gè)實(shí)際工業(yè)案例對(duì)所提出的方法進(jìn)行性能檢驗(yàn)與分析,同時(shí)將傳統(tǒng)的PLS[10]、最小二乘支持向量機(jī)(LSSVR)[11]、滑動(dòng)時(shí)間窗 PLS(MTW-PLS)[12]三種方法作為對(duì)比。采用三個(gè)指標(biāo)衡量軟傳感器的預(yù)測(cè)精度,即RMSE、確定系數(shù)(R2)以及最大絕對(duì)誤差(MAE),其中,RMSE和MAE代表預(yù)測(cè)誤差;R2表示預(yù)測(cè)值與真實(shí)值的契合程度。
4.1 脫丁烷過(guò)程簡(jiǎn)介
脫丁烷過(guò)程是石腦油裂解工廠的一部分,主要設(shè)備為脫丁烷分餾塔,其流程如圖2所示。脫丁烷過(guò)程的主要任務(wù)是通過(guò)分餾原理,將分餾塔塔底的C3和C4組分盡可能脫除掉,因此塔底丁烷濃度是關(guān)鍵的質(zhì)量參數(shù)。在實(shí)際生產(chǎn)中,分餾塔塔底丁烷濃度是通過(guò)安裝在塔頂?shù)臍庀嗌V儀測(cè)量的。塔底含丁烷蒸汽上升到塔頂需要30min~45min的時(shí)間,色譜儀本身的分析周期為15min,因此,對(duì)塔底丁烷濃度的測(cè)量存在45min~60min的滯后,嚴(yán)重影響了控制品質(zhì),導(dǎo)致丁烷濃度波動(dòng)頻繁。所以,需要開發(fā)軟傳感器彌補(bǔ)分析儀表的不足。該過(guò)程的詳細(xì)信息可參考文獻(xiàn)[13]。脫丁烷過(guò)程的數(shù)據(jù)集來(lái)自實(shí)際的生產(chǎn)過(guò)程,已成為檢驗(yàn)軟傳感器性能的標(biāo)準(zhǔn)數(shù)據(jù)集。該數(shù)據(jù)集是一個(gè)公開數(shù)據(jù),共包含2394個(gè)樣本,其中輔助參數(shù)的采樣周期為6min。本文將前1200個(gè)樣本作為歷史數(shù)據(jù),剩余樣本模擬在線數(shù)據(jù)。此外,假設(shè)僅1/3的樣本是有標(biāo)簽的,其余樣本是無(wú)標(biāo)簽的。
4.2 結(jié)果與討論
不同方法對(duì)丁烷濃度的預(yù)測(cè)結(jié)果如圖2所示,且四種方法的性能由表1量化。其中LSSVR、DPLS、MTW-PLS三種方法的參數(shù)也是通過(guò)智能優(yōu)化算法確定,從而保證性能比較的客觀性與公平性。從圖2(a)中可以看出,非線性的LSSVR方法的估計(jì)效果也很差。另一方面,圖2(b)顯示,DPLS雖然為線性建模方法,但能夠大致跟蹤丁烷濃度的變化趨勢(shì),預(yù)測(cè)精度顯著優(yōu)于靜態(tài)的PLS和LSSVR。這表明,脫丁烷過(guò)程具有很強(qiáng)的動(dòng)態(tài)特性,忽略這種動(dòng)態(tài)特性,即使非線性方法也無(wú)法獲得滿意的性能。
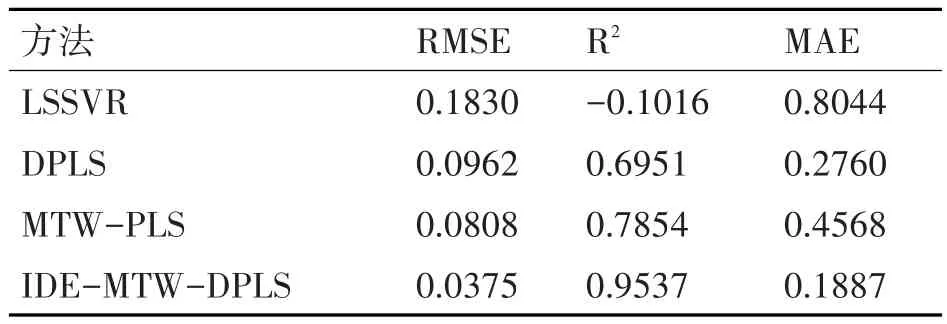
表1 四種軟傳感器建模方法的性能比較
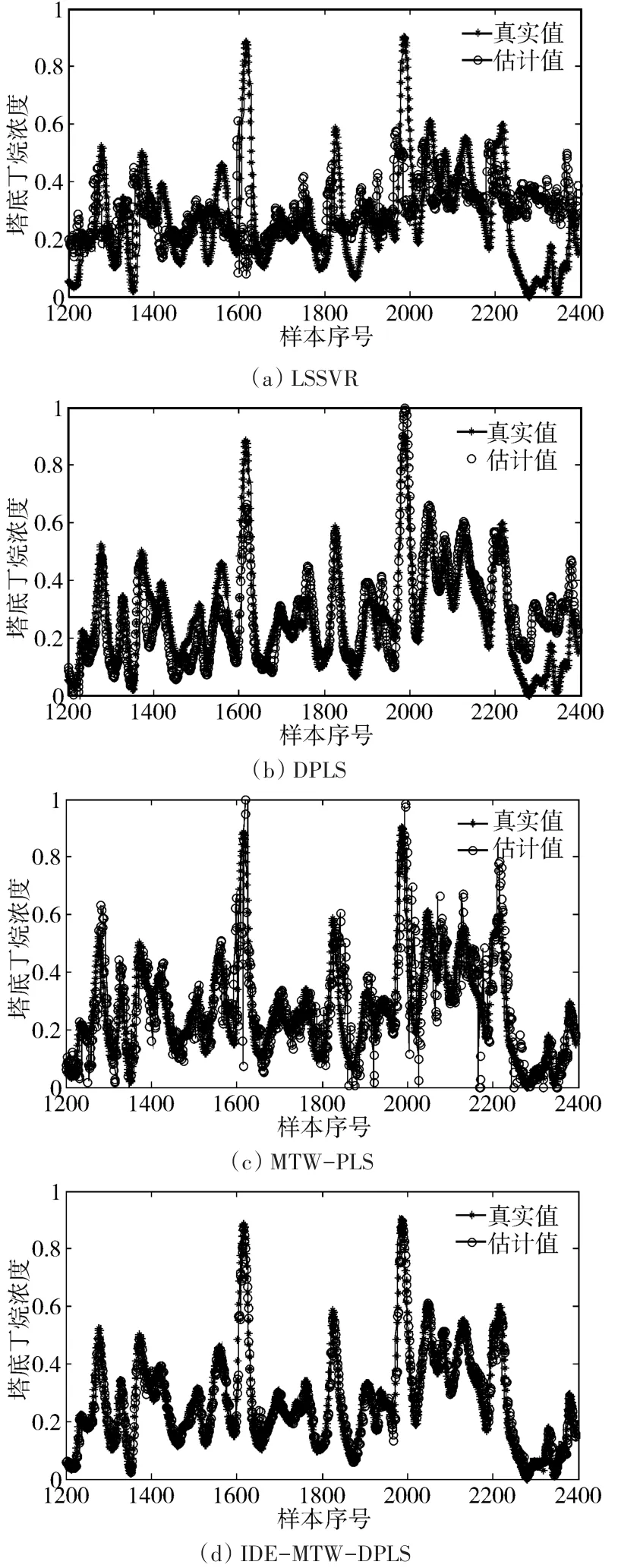
圖2 四種軟傳感器對(duì)塔底丁烷濃度的估計(jì)結(jié)果
但是,圖2(b)也表明DPLS模型在某些操作時(shí)間段內(nèi)對(duì)丁烷濃度的預(yù)測(cè)結(jié)果存在顯著的偏差。這是由于DPLS為批處理方法,不具備在線學(xué)習(xí)能力,其性能易受到過(guò)程時(shí)變因素的影響。相比之下,圖2(c)顯示,在滑動(dòng)時(shí)間窗框架下建立自適應(yīng)的軟傳感器模型能夠有效解決這一問題。然而,從圖2(c)中不難看出,MTW-PLS很容易出現(xiàn)較大的預(yù)測(cè)偏差。相比之下,從圖2(d)中可以看出,本文提出的IDE-MTW-DPLS方法能夠有效地跟蹤丁烷濃度的動(dòng)態(tài)變化趨勢(shì),且不存在較大的預(yù)測(cè)偏差,在整個(gè)操作時(shí)段內(nèi),相對(duì)于其它三種方法表現(xiàn)除了非常高的預(yù)測(cè)能力。這是因?yàn)椋琁DE-MTW-DPLS綜合考慮到了過(guò)程的非線性、動(dòng)態(tài)與時(shí)變特性,而且采用智能化的方法解決了手動(dòng)整定參數(shù)的巨大負(fù)擔(dān)。
從表1對(duì)四種方法性能的量化結(jié)果可以看出,LSSVR的預(yù)測(cè)RMSE非常大,且R2指標(biāo)已經(jīng)成為負(fù)值;DPLS方法考慮到了過(guò)程動(dòng)態(tài)特性,MTM-PLS采用局部化的自適應(yīng)方法,因而有效降低了預(yù)測(cè)誤差。對(duì)比IDE-MTW-DPLS與其它方法的預(yù)測(cè)誤差可以進(jìn)一步肯定了本文提出的方法的顯著優(yōu)勢(shì)。例如,從RMSE的角度,本文提出的方法相比LSSVR、DPLS、MWPLS可將預(yù)測(cè)精度分別提升79.5%、61.0%、53.6%,可認(rèn)為是性能方面的顯著提升。另一方面,IDE-MTW-DPLS的R2指標(biāo)超過(guò)了95%,且MAE指標(biāo)也顯著小于其它三種方法,表明本文提出的方法有很大的應(yīng)用潛質(zhì)。
5 結(jié)語(yǔ)
本文針對(duì)傳統(tǒng)的軟傳感器技術(shù)在面臨復(fù)雜的工業(yè)過(guò)程特性時(shí)難以獲得滿意的預(yù)測(cè)精度這一難題,提出了一種智能化的軟傳感器建模方法,即IDE-MTW-DPLS。IDE-MTW-DPLS通過(guò)滑動(dòng)時(shí)間窗方法,建立自適應(yīng)的動(dòng)態(tài)偏最小二乘模型。采用公開的標(biāo)準(zhǔn)工業(yè)數(shù)據(jù)集對(duì)IDE-MTW-DPLS的模型進(jìn)行檢驗(yàn),結(jié)果表明,IDE-MTW-DPLS的預(yù)測(cè)精度顯著高于同類方法,表明IDE-MTW-DPLS可有效處理過(guò)程的非線性、動(dòng)態(tài)與時(shí)變特性。另一方面,IDE-MTW-DPLS簡(jiǎn)單易行,且避免了人工整定參數(shù)的巨大復(fù)雜以及無(wú)法到最優(yōu)性等缺點(diǎn)。因此,本文提出的方法具有較高的應(yīng)用價(jià)值。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
