基于門控循環(huán)單元神經(jīng)網(wǎng)絡(luò)的箱型梁結(jié)構(gòu)裂紋損傷檢測(cè)方法
2022-09-06 08:43:00駱擷冬馬棟梁張松林王德禹
中國艦船研究 2022年4期
駱擷冬,馬棟梁,張松林,王德禹
上海交通大學(xué) 海洋工程國家重點(diǎn)實(shí)驗(yàn)室,上海 200240
0 引 言
船舶在生產(chǎn)和服役的過程中會(huì)受到例如焊接、疲勞等多種因素的影響而產(chǎn)生裂紋[1-2],并且在海洋復(fù)雜的載荷作用下,裂紋還會(huì)擴(kuò)展,最終使結(jié)構(gòu)斷裂,從而引發(fā)災(zāi)難性的事故。
為了及時(shí)發(fā)現(xiàn)船體結(jié)構(gòu)損傷,避免安全隱患,學(xué)者們提出了多種損傷檢測(cè)方法,其中結(jié)構(gòu)健康監(jiān)測(cè)技術(shù)(structural health monitoring,SHM)可以實(shí)現(xiàn)結(jié)構(gòu)安全的實(shí)時(shí)在線檢測(cè)。Lindemann 等[3]設(shè)計(jì)了一種基于概率方法的船體監(jiān)測(cè)系統(tǒng),完成了對(duì)船舶結(jié)構(gòu)監(jiān)測(cè)技術(shù)的初步探索。大連新船重工在國內(nèi)首次設(shè)計(jì)出了船體應(yīng)力監(jiān)測(cè)系統(tǒng),并安裝應(yīng)用到了300 000 t 級(jí)VLCC 上[4]。賈連徽等[5]基于船體結(jié)構(gòu)應(yīng)力實(shí)時(shí)監(jiān)測(cè)系統(tǒng),結(jié)合整船有限元分析和海況信息,給出了應(yīng)力監(jiān)測(cè)點(diǎn)的選取方法,并根據(jù)監(jiān)測(cè)點(diǎn)的受力特點(diǎn)給出了傳感器的布置方法。但隨著計(jì)算機(jī)科學(xué)的發(fā)展,對(duì)船舶結(jié)構(gòu)損傷智能化檢測(cè)的要求越來越高,傳統(tǒng)監(jiān)測(cè)方法的性能已難以滿足工程界的需求。
機(jī)器學(xué)習(xí)(machine learning,ML)已被成功應(yīng)用于計(jì)算機(jī)視覺、自然語言處理等多個(gè)領(lǐng)域,具有非常強(qiáng)大的學(xué)習(xí)能力,因此許多學(xué)者嘗試將機(jī)器學(xué)習(xí)應(yīng)用到結(jié)構(gòu)損傷檢測(cè)領(lǐng)域,用以提高結(jié)構(gòu)損傷檢測(cè)能力。Zubaydi 等[6]使用多層感知機(jī)(multi-layer perceptron,MLP)檢測(cè)加筋板的裂紋損傷,并將通過有限元法得到的加筋板振動(dòng)響應(yīng)自相關(guān)函數(shù)以及其一階導(dǎo)數(shù)作為輸入,較為有效地識(shí)別了損傷的位置和范圍。Mehrjoo 等[7]將固有頻率和模態(tài)振型作為輸入,提出了一種基于MLP的損傷檢測(cè)方法。Palomino 等[8]采用概率神經(jīng)網(wǎng)絡(luò)和模糊聚類分析來識(shí)別裂紋的位置,證明了該方法的可行性。雖然傳統(tǒng)的機(jī)器學(xué)習(xí)與神經(jīng)網(wǎng)絡(luò)在損傷檢測(cè)方面取得了一定的研究成果,但仍存在諸多不足,如收斂速度慢、檢測(cè)精度低,且性能過于依賴輸入特征,對(duì)噪聲的敏感性較高等[9]。
近年來,深度學(xué)習(xí)(deep learning,DL)憑借其優(yōu)秀的學(xué)習(xí)能力得到了許多研究者的關(guān)注,并被應(yīng)用到了船體結(jié)構(gòu)損傷檢測(cè)領(lǐng)域。在眾多深度學(xué)習(xí)模型中,循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network,RNN)可以處理時(shí)間序列,并且有“記憶”的功能,因此在結(jié)構(gòu)的實(shí)時(shí)損傷檢測(cè)方面扮演著重要角色。長(zhǎng)短期記憶(long short-term memory,LSTM)神經(jīng)網(wǎng)絡(luò)是一種改進(jìn)的循環(huán)神經(jīng)網(wǎng)絡(luò),其解決了可能出現(xiàn)的梯度消失和梯度爆炸問題[10],能夠更為有效地處理長(zhǎng)期、復(fù)雜的時(shí)間序列。Zou 等[11]利用集合經(jīng)驗(yàn)?zāi)B(tài)分解預(yù)處理原始振動(dòng)信號(hào),得到了將故障特征信號(hào)輸入到LSTM 中來診斷滾動(dòng)軸承的故障情況,但該方法是通過人工來提取損傷特征信號(hào),難以保證信息的完整性,且還依賴于特征提取的方式。Ma 等[12]提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network,CNN)的加筋板裂紋損傷檢測(cè)方法,張松林等[13]使用LSTM建立了矩形板裂紋損傷檢測(cè)模型,但他們均未對(duì)訓(xùn)練集以外的損傷情況進(jìn)行近似檢測(cè)研究。
LSTM 模型有許多變體,其中以Cho 等[14]提出的門控循環(huán)單元(gated recurrent unit,GRU)最為著名。GRU 改變了LSTM 的神經(jīng)元結(jié)構(gòu),其不僅保留了LSTM 神經(jīng)網(wǎng)絡(luò)的長(zhǎng)期記憶能力,還讓其自身的內(nèi)部結(jié)構(gòu)更簡(jiǎn)單,這對(duì)特征不是特別復(fù)雜的數(shù)據(jù)來說有著更好的收斂性。Zhao 等[15]首先在時(shí)間序列數(shù)據(jù)中提取了局部特征,隨后通過雙向GRU 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)了機(jī)器的狀態(tài),并在齒輪箱、軸承等故障檢測(cè)中驗(yàn)證了算法的有效性。薛陽等[16]提出了一種結(jié)合CNN 和GRU 的超短期風(fēng)電預(yù)測(cè)模型,其將氣象數(shù)據(jù)作為輸入,根據(jù)風(fēng)速和風(fēng)力的發(fā)電功率特性,實(shí)現(xiàn)了更高精度的風(fēng)電預(yù)測(cè)。
目前,已有部分研究者基于GRU 神經(jīng)網(wǎng)絡(luò),針對(duì)軸承、齒輪等機(jī)械結(jié)構(gòu)的損傷檢測(cè)進(jìn)行研究,但少有學(xué)者將其應(yīng)用到船舶結(jié)構(gòu)上。船舶本身結(jié)構(gòu)雖然復(fù)雜,但其本質(zhì)上還是一種箱型梁結(jié)構(gòu)[17]。本文擬以某箱型梁結(jié)構(gòu)為研究對(duì)象,提出一種基于GRU 神經(jīng)網(wǎng)絡(luò)的裂紋損傷檢測(cè)方法。由于對(duì)結(jié)構(gòu)進(jìn)行損傷檢測(cè)時(shí)加速度信號(hào)能夠反映整體和局部的健康狀況,因此將選取加速度響應(yīng)作為輸入,通過GRU 神經(jīng)網(wǎng)絡(luò)提取損傷特征并進(jìn)行分類,從而實(shí)現(xiàn)對(duì)箱型梁裂紋損傷的實(shí)時(shí)檢測(cè)。
1 GRU 神經(jīng)網(wǎng)絡(luò)
GRU 的結(jié)構(gòu)如圖1 所示。圖中,t為時(shí)刻,xt為當(dāng)前時(shí)刻的輸入,ht-1,ht分別為上一時(shí)刻和當(dāng)前時(shí)刻的輸出,最終,形成一個(gè)具有“記憶”功能的“細(xì)胞”。細(xì)胞內(nèi)有2 個(gè)門控單元,分別是更新門(update gate)和重置門(reset gate),二者共同作用,控制GRU 的更新和儲(chǔ)存記憶。兩個(gè)激活函數(shù)分別表示如下:
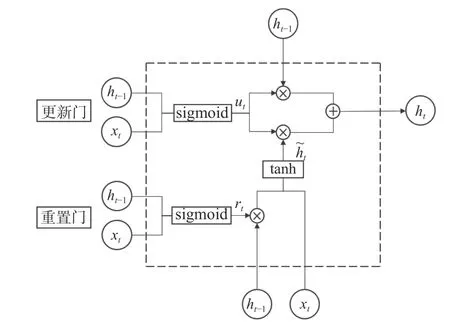
圖1 GRU 結(jié)構(gòu)Fig. 1 Structure of GRU
為了實(shí)現(xiàn)記憶功能,2 個(gè)門控單元的輸入都是上一時(shí)刻的輸出ht-1和當(dāng)前時(shí)刻的輸入xt。其中,更新門ut控制上一時(shí)刻輸出的信息流入到當(dāng)前時(shí)刻的數(shù)量。

式中:Wu為權(quán)重矩陣;bu為偏置項(xiàng)。當(dāng)ut=0時(shí),輸入全部流入當(dāng)前時(shí)刻;當(dāng)ut=1時(shí),則全部被丟棄。
重置門rt控制上一時(shí)刻輸出的信息被遺忘的數(shù)量以及當(dāng)前時(shí)刻輸入的信息被添加的數(shù)量。

這里,rt越小,忽略的ht-1越多。而后,再通過激活函數(shù)tanh,形成由重置門控制的當(dāng)前時(shí)刻的候選輸入為

最終,由兩部分相加得到當(dāng)前時(shí)刻的輸出ht為

式(6)中,前一部分是通過1 減去更新門ut來控制上一時(shí)刻的輸出ht-1,另一部分則是通過更新門ut來控制當(dāng)前時(shí)刻的候選輸入。
對(duì)裂紋損傷的檢測(cè)除了需要通過大量的GRU 神經(jīng)元提取損傷數(shù)據(jù)的特征,還需要對(duì)所有特征通過標(biāo)簽進(jìn)行分類。本文采用的分類函數(shù)為Softmax 函數(shù),又稱歸一化指數(shù)函數(shù)。
Softmax 函數(shù)是將向量f(x)中的每個(gè)元素變換為向量P中的對(duì)應(yīng)元素P[i],并且是以概率的形式展現(xiàn)出來。P[i]越大,則實(shí)際裂紋標(biāo)簽為i的概率越高,最終將P中最大元素P[k]的標(biāo)簽k認(rèn)定為預(yù)測(cè)的裂紋標(biāo)簽。
通過Softmax 函數(shù)得到預(yù)測(cè)的裂紋標(biāo)簽后,還需要根據(jù)預(yù)測(cè)標(biāo)簽與實(shí)際標(biāo)簽的誤差來得到損失值,并利用損失值的大小來證明神經(jīng)網(wǎng)絡(luò)模型的魯棒性。本文使用的損失函數(shù)為交叉熵?fù)p失函數(shù)(cross entropy loss)。
式中:q為板裂紋的實(shí)際標(biāo)簽值;f(x)為神經(jīng)網(wǎng)絡(luò)模型的實(shí)際輸出。
綜上,GRU 模型是以得到最小的損失函數(shù)值為目標(biāo)進(jìn)行訓(xùn)練,最終獲得對(duì)數(shù)據(jù)的預(yù)測(cè)結(jié)果。
2 箱型梁裂紋損傷檢測(cè)分析
2.1 有限元模型
GRU 神經(jīng)網(wǎng)絡(luò)的訓(xùn)練需要大量數(shù)據(jù),Law 等[18]通過試驗(yàn)證明了采用有限元方法計(jì)算結(jié)構(gòu)加速度響應(yīng)的準(zhǔn)確性與可靠性,因此,本文將采用Python語言對(duì)ABAQUS 軟件進(jìn)行二次開發(fā),建立箱型梁結(jié)構(gòu)的有限元模型并計(jì)算加速度響應(yīng)。
本文研究的箱型梁模型長(zhǎng)L= 2 160 mm,寬度和深度為B=D= 1 200 mm,厚度t1= 5 mm,模型如圖2(a)所示。同時(shí),在頂板與底板上分別設(shè)2 根均布加強(qiáng)筋,在兩側(cè)板上分別設(shè)置3 根均布加強(qiáng)筋,加強(qiáng)筋的高度h= 100 mm,厚度t2= 5 mm。采用有限元計(jì)算得到的模型前8 階固有頻率分別為79.10 ,87.22,87.66,95.57,96.05,104.07,112.43,115.96 Hz。考慮到箱型梁動(dòng)態(tài)分析中的阻尼效應(yīng),本文采用瑞利阻尼(C= αM+ βK,其中M,K分別為結(jié)構(gòu)的質(zhì)量矩陣和剛度矩陣,C為結(jié)構(gòu)的阻尼矩陣, α, β分別為結(jié)構(gòu)的質(zhì)量比例阻尼系數(shù)和剛度比例阻尼系數(shù))進(jìn)行模擬[19]。最終選取的材料參數(shù)如表1 所示。
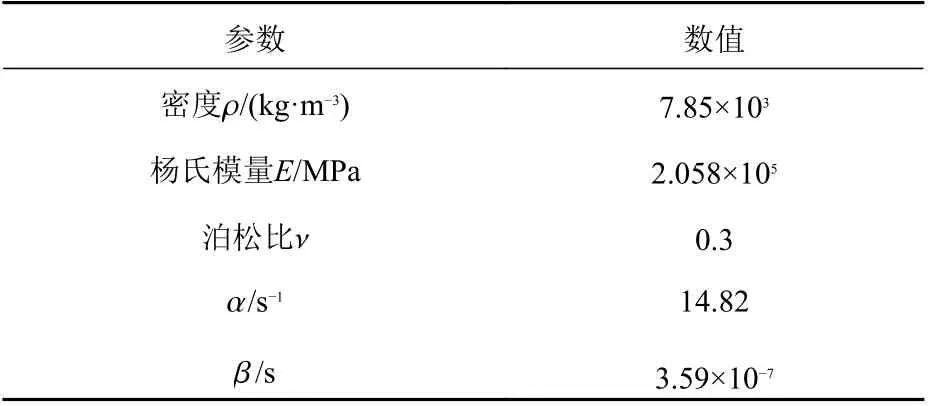
表1 箱型梁材料參數(shù)Table 1 The material parameters of the box girder
本文所采用模型的邊界條件為,將圖2(b)所示端面1,2 的所有節(jié)點(diǎn)分別與各自端面的形心A,B 進(jìn)行剛性耦合,并對(duì)其中的端面1 放開沿z方向的位移與繞x方向的轉(zhuǎn)角,對(duì)端面2 放開繞x方向的轉(zhuǎn)角,2 個(gè)端面其他方向的位移與轉(zhuǎn)角則均予以約束。有限元模型的網(wǎng)格尺寸為20 mm × 20 mm,網(wǎng)格單元類型為S4R。
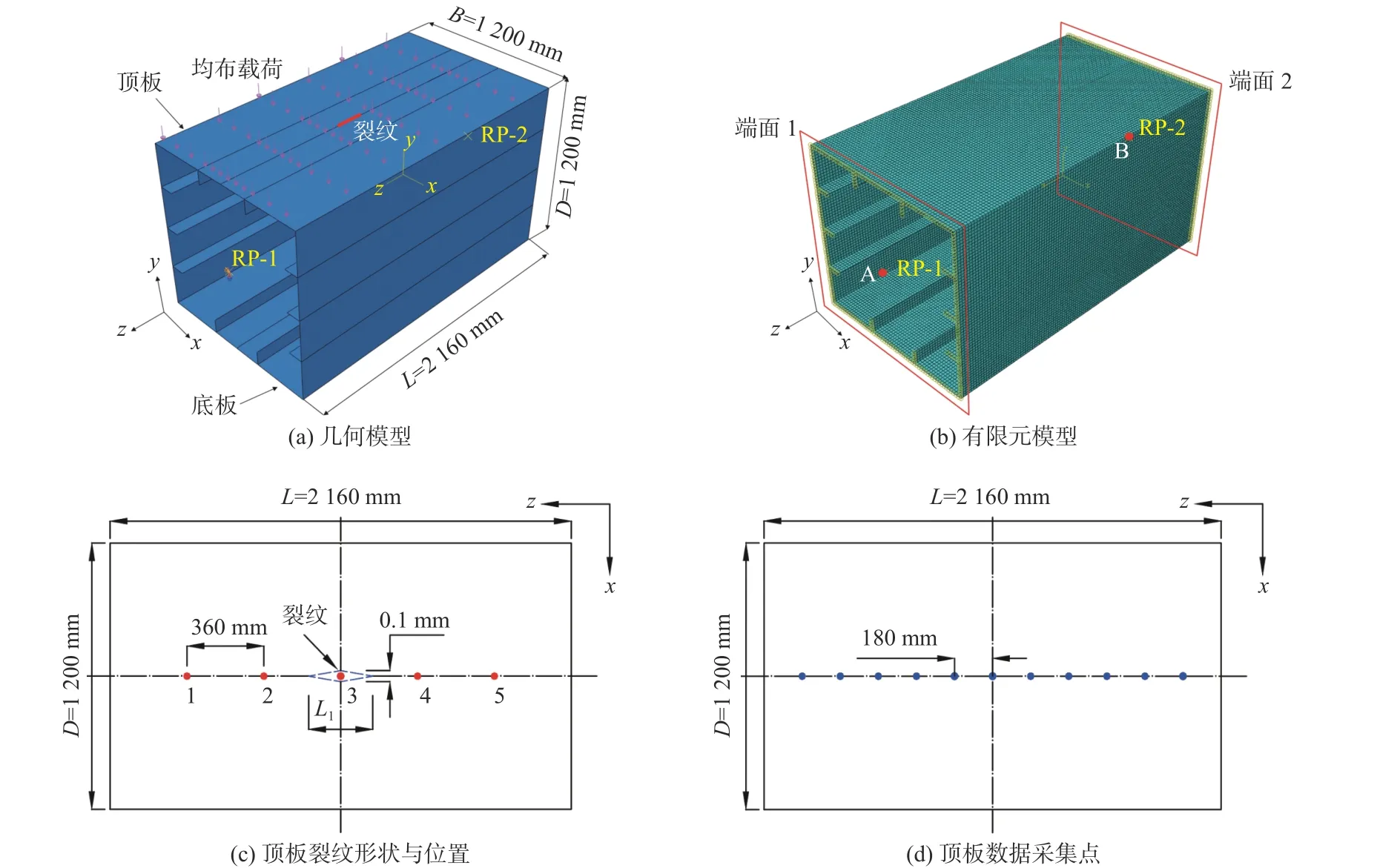
圖2 數(shù)學(xué)模型Fig. 2 Mathematical model
實(shí)際船舶的受載情況復(fù)雜且隨機(jī),難以獲取。高斯白噪聲是一個(gè)均值為0 的平穩(wěn)遍歷隨機(jī)過程,其任意兩個(gè)值在統(tǒng)計(jì)上都是獨(dú)立的,同時(shí),其功率譜密度是恒定的,可以激發(fā)結(jié)構(gòu)的多重模態(tài)[20]。因此,本文采用高斯白噪聲模擬結(jié)構(gòu)遭受的激勵(lì),并施加于箱型梁頂板上。本文所采用的高斯白噪聲激勵(lì)為面外均布載荷,載荷均值為0,標(biāo)準(zhǔn)差為0.01 MPa,對(duì)應(yīng)于一個(gè)低程度的載荷水平。載荷的采樣頻率為10 000 Hz,按對(duì)應(yīng)時(shí)間點(diǎn)施加于板上,共施加4 s。由于本文主要關(guān)注模型的前8 階固有頻率,因此,采用截止頻率為256 Hz的巴特沃斯濾波器(Butterworth filter)對(duì)上述載荷進(jìn)行濾波。
在船舶裂紋中,貫穿裂紋為主要的裂紋形式,可能由疲勞、焊接缺陷等多種因素產(chǎn)生,因此,本文將對(duì)發(fā)生于頂板和底板的沿板長(zhǎng)方向的單裂紋損傷進(jìn)行研究。對(duì)頂板和底板,分別設(shè)置了5 個(gè)裂紋位置和3 個(gè)裂紋長(zhǎng)度:每塊板上的5 種裂紋位置等距分布;3 個(gè)裂紋長(zhǎng)度L1分別為120,240,360 mm。考慮到模擬的是實(shí)際裂紋,同時(shí)便于網(wǎng)格劃分,因此采用菱形裂紋,其最大寬度為0.1 mm。頂板裂紋的位置和形狀如圖2(c)所示,底板裂紋的位置和形狀與頂板相同。由于加速度響應(yīng)在裂紋附近位置處變化更明顯,因此在頂板和底板上分別設(shè)置了11 個(gè)加速度采集點(diǎn),將采集到的結(jié)構(gòu)加速度響應(yīng)作為神經(jīng)網(wǎng)絡(luò)的輸入數(shù)據(jù)。當(dāng)采集點(diǎn)與裂紋位置重合時(shí),采集裂紋中心位置上側(cè)節(jié)點(diǎn)的加速度響應(yīng)。頂板的11 個(gè)加速度采集點(diǎn)如圖2(d)所示,底板的采集點(diǎn)與頂板相同。
2.2 原始數(shù)據(jù)處理
考慮到結(jié)構(gòu)在初始振動(dòng)階段會(huì)受到自由振動(dòng)的影響,因此針對(duì)無裂紋的箱型梁的自由振動(dòng)進(jìn)行分析,通過在頂板上施加均布瞬時(shí)激勵(lì),得到其頂板中心位置在0~2 s 時(shí)間范圍內(nèi)的加速度曲線如圖3 所示。由圖可以看出,箱型梁在初始階段存在明顯的自由振動(dòng),并以較快的速度衰減,可以認(rèn)為1 s 后自由振動(dòng)基本消失。因此,本文將僅采集1~4 s 內(nèi)的加速度數(shù)據(jù)。考慮到采樣定理,為保證信號(hào)信息不丟失,采樣頻率需大于等于2 倍的信號(hào)頻率(即2.1 節(jié)所述的256 Hz 截止頻率),因此,本文設(shè)置的加速度采集點(diǎn)的采樣頻率為512 Hz,最終,每個(gè)采集點(diǎn)得到的數(shù)據(jù)長(zhǎng)度為1 536。
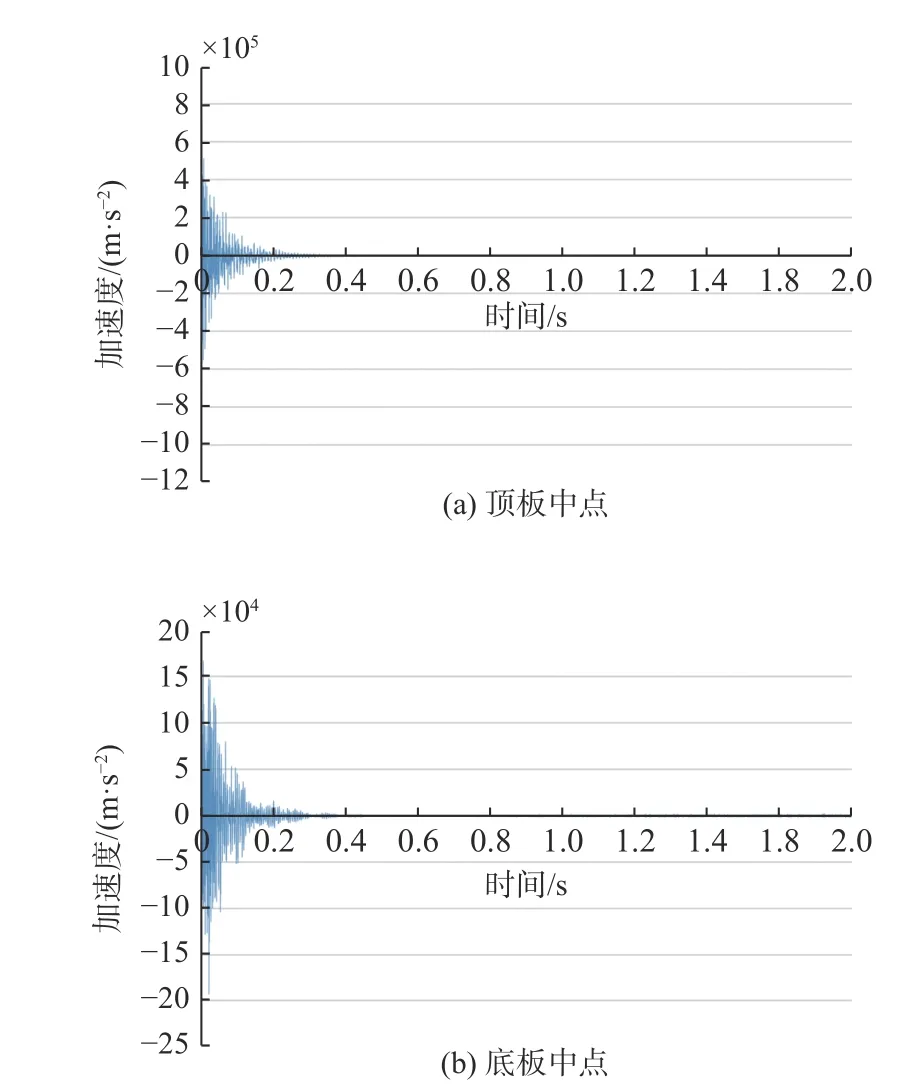
圖3 無損箱型梁自由振動(dòng)曲線Fig. 3 Free vibration curves of an intact box girder
由于采用有限元計(jì)算所得原始加速度數(shù)據(jù)存在量級(jí)不統(tǒng)一的問題,為便于GRU 神經(jīng)網(wǎng)絡(luò)能夠更加高效地學(xué)習(xí)到數(shù)據(jù)的特征,提高精度,可對(duì)采集到的數(shù)據(jù)進(jìn)行高斯歸一化處理[20]。高斯歸一化可以將原始數(shù)據(jù)變換成均值為0、標(biāo)準(zhǔn)差為1、服從標(biāo)準(zhǔn)正態(tài)分布的數(shù)據(jù)集:

式中:xi為原始數(shù)據(jù);μ和σ0分別為原始數(shù)據(jù)的均值和標(biāo)準(zhǔn)差;為變換后得到的歸一化數(shù)據(jù)。
由于載荷的施加位置為頂板,由圖3 可見,頂板和底板處的加速度響應(yīng)大小有一定的差距,因此,將頂板和底板的加速度數(shù)據(jù)分別進(jìn)行了高斯歸一化處理。此外,考慮到在實(shí)際的裂紋損傷檢測(cè)工作中,由于受外部環(huán)境、采集設(shè)備等多種因素的影響,噪聲的影響不可避免,因此對(duì)處理后的數(shù)據(jù)增加了均值為0、標(biāo)準(zhǔn)差為0.3 的高斯白噪聲,并針對(duì)無噪聲和有噪聲的數(shù)據(jù)訓(xùn)練結(jié)果進(jìn)行了對(duì)比分析。
2.3 數(shù)據(jù)集的生成
本文的數(shù)據(jù)處理和數(shù)據(jù)集的生成流程如圖4所示。
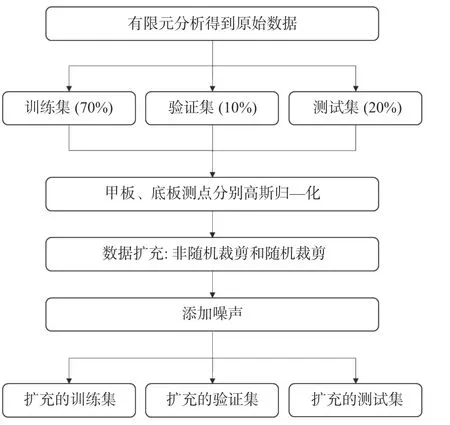
圖4 數(shù)據(jù)處理與數(shù)據(jù)集生成流程Fig. 4 Data processing and data set generation
首先,通過對(duì)有限元模型進(jìn)行多次計(jì)算,得到足夠多的原始數(shù)據(jù)。本文針對(duì)單裂紋損傷進(jìn)行研究,研究的工況共31 個(gè)(10 個(gè)裂紋位置 × 3 個(gè)裂紋長(zhǎng)度 + 1 個(gè)無損工況),隨后對(duì)每個(gè)有裂紋模型分別計(jì)算30 次,無損工況計(jì)算100 次,最終得到1 000 組原始數(shù)據(jù)。對(duì)于每一次計(jì)算,為保證樣本的有效性和隨機(jī)性,施加于結(jié)構(gòu)上的都是隨機(jī)生成的高斯白噪聲激勵(lì),兩兩之間各不相同。
由于GRU 神經(jīng)網(wǎng)絡(luò)的運(yùn)行需要的數(shù)據(jù)集包括訓(xùn)練集、驗(yàn)證集和測(cè)試集,同時(shí)為保證各數(shù)據(jù)集的獨(dú)立性,在數(shù)據(jù)處理的最初階段,先將原始數(shù)據(jù)中的有損工況、無損工況分別按7:1:2 的比例分為訓(xùn)練集、驗(yàn)證集和測(cè)試集,然后分別按2.2 節(jié)所述方法對(duì)原始數(shù)據(jù)進(jìn)行處理,消除自由振動(dòng)的影響并進(jìn)行高斯歸一化,隨后再采用數(shù)據(jù)擴(kuò)充的方法對(duì)樣本數(shù)據(jù)進(jìn)行擴(kuò)充,最終得到完整的數(shù)據(jù)集。
本文通過數(shù)據(jù)裁剪的方法進(jìn)行數(shù)據(jù)擴(kuò)充,數(shù)據(jù)裁剪方法可分為非隨機(jī)裁剪和隨機(jī)裁剪2 類。其中非隨機(jī)裁剪指將高斯歸一化后的1~4 s 時(shí)間范圍內(nèi)長(zhǎng)度為1 536 的數(shù)據(jù)平均分成三等分;隨機(jī)裁剪則是從高斯歸一化后的數(shù)據(jù)集中隨機(jī)選取若干樣本,然后再從每個(gè)樣本上隨機(jī)裁剪一段長(zhǎng)度為512 的數(shù)據(jù)。將由這2 種方法得到的樣本匯總為完整數(shù)據(jù)集,數(shù)據(jù)集中的樣本總數(shù)被擴(kuò)充至14 520 個(gè),其中訓(xùn)練集、驗(yàn)證集、測(cè)試集的樣本數(shù)分別為10 164,1 452 和2 904 個(gè)。每個(gè)樣本的數(shù)據(jù)形狀為1×512×22,樣本數(shù)據(jù)尺寸的第1 個(gè)維度表示數(shù)據(jù)的高度;第2 個(gè)維度表示數(shù)據(jù)的長(zhǎng)度,對(duì)應(yīng)的采樣頻率512 Hz;第3 個(gè)維度表示數(shù)據(jù)深度,本文通過數(shù)據(jù)采集點(diǎn)數(shù)來表示數(shù)據(jù)深度,對(duì)應(yīng)22 個(gè)加速度采集點(diǎn)。
2.4 GRU 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)及參數(shù)設(shè)置
本文通過GRU 神經(jīng)網(wǎng)絡(luò)對(duì)箱型梁進(jìn)行裂紋損傷檢測(cè)。該神經(jīng)網(wǎng)絡(luò)共有1 層輸入層,3 層隱藏層,1 層輸出層,其結(jié)構(gòu)如圖5 所示。圖中:a為輸入的損傷數(shù)據(jù),即箱型梁測(cè)點(diǎn)的加速度響應(yīng),其數(shù)據(jù)結(jié)構(gòu)為b×t×d,其中b為批處理大小,即每次迭代的樣本數(shù)量,t為時(shí)間步,即輸入數(shù)據(jù)的時(shí)間長(zhǎng)度,d為每個(gè)時(shí)間步輸入向量的特征維度;h為GRU 層提取的損傷特征,用于確定裂紋的位置和長(zhǎng)度;P[i]為最終的輸出數(shù)據(jù),即損傷在各標(biāo)簽下的概率。
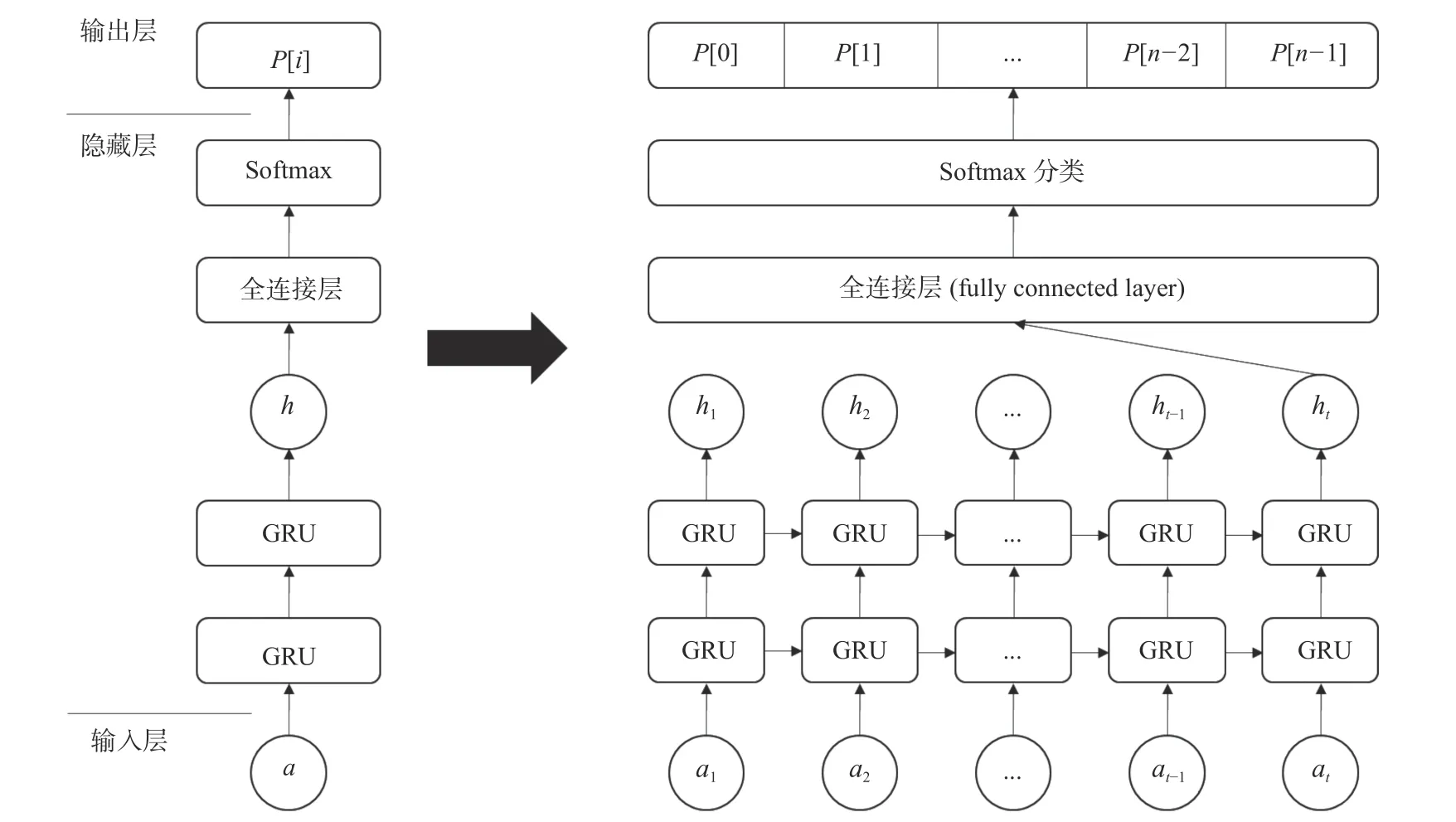
圖5 GRU 神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu)Fig. 5 The structure of the GRU neural network model
隱藏層包含2 層GRU 神經(jīng)網(wǎng)絡(luò)層和1 層全連接層,其中GRU 神經(jīng)網(wǎng)絡(luò)層用于從輸入數(shù)據(jù)中提取損傷特征,全連接層則對(duì)提取到的損傷特征進(jìn)行處理并輸入到Softmax 函數(shù)中進(jìn)行分類。同時(shí),為避免模型出現(xiàn)過擬合現(xiàn)象,本文在GRU 層間加入了Dropout 算法,可以讓模型按照一定的概率舍棄部分神經(jīng)元,避免依賴數(shù)據(jù)的局部特征進(jìn)行輸出[21]。
在本文中,輸入數(shù)據(jù)a代表一批加速度數(shù)據(jù),ai代表這批加速度數(shù)據(jù)按照時(shí)間步展開后各時(shí)刻的加速度數(shù)據(jù)。輸入數(shù)據(jù)首先輸入到前一層GRU 神經(jīng)元進(jìn)行計(jì)算,并將前一層GRU 神經(jīng)元的輸出作為后一層的輸入,可以認(rèn)為模型在每一時(shí)刻同時(shí)學(xué)習(xí)到的是22 個(gè)不同采集點(diǎn)的加速度數(shù)據(jù),連續(xù)學(xué)習(xí)了512 個(gè)時(shí)間步。然后,將最后一層GRU 神經(jīng)元最后時(shí)刻的輸出作為全連接層的輸入,并通過Softmax 函數(shù)進(jìn)行分類,輸出模型預(yù)測(cè)的裂紋標(biāo)簽。
神經(jīng)網(wǎng)絡(luò)需要設(shè)置合適的超參數(shù),GRU 神經(jīng)網(wǎng)絡(luò)的超參數(shù)主要包括學(xué)習(xí)率、模型訓(xùn)練次數(shù)、批處理大小、輸入層維度、隱藏層特征維度、循環(huán)層數(shù)、輸出層維度、舍棄概率等。其中,學(xué)習(xí)率指神經(jīng)網(wǎng)絡(luò)模型學(xué)習(xí)數(shù)據(jù)特征的速度,這決定了目標(biāo)函數(shù)能否以及如何收斂至局部最小值;訓(xùn)練次數(shù)(epoch)指使用訓(xùn)練集的全部數(shù)據(jù)對(duì)模型進(jìn)行完整訓(xùn)練的次數(shù);批處理大小、隱藏層特征維度已在本節(jié)開頭進(jìn)行論述;輸入層維度指樣本的數(shù)據(jù)深度,對(duì)應(yīng)22 個(gè)加速度采集點(diǎn);循環(huán)層數(shù)指本文采用的2 層GRU 層;輸出層維度取決于研究的內(nèi)容,如裂紋位置、裂紋長(zhǎng)度等;舍棄概率指Dropout 算法按該概率舍棄的部分神經(jīng)元。
經(jīng)過多次測(cè)試,本文GRU 神經(jīng)網(wǎng)絡(luò)使用的超參數(shù)值如表2 所示。此外,為幫助模型更好地收斂而得到最優(yōu)解,本文還在GRU 神經(jīng)網(wǎng)絡(luò)中加入了Adam 優(yōu)化算法,并以指數(shù)衰減的形式更新了模型的學(xué)習(xí)率:

式中:LR為 當(dāng)前訓(xùn)練批次的學(xué)習(xí)率;LR0為初始訓(xùn)練批次的學(xué)習(xí)率,如表2 所示,為0.01; λ為衰減常數(shù),本文選取為0.95。
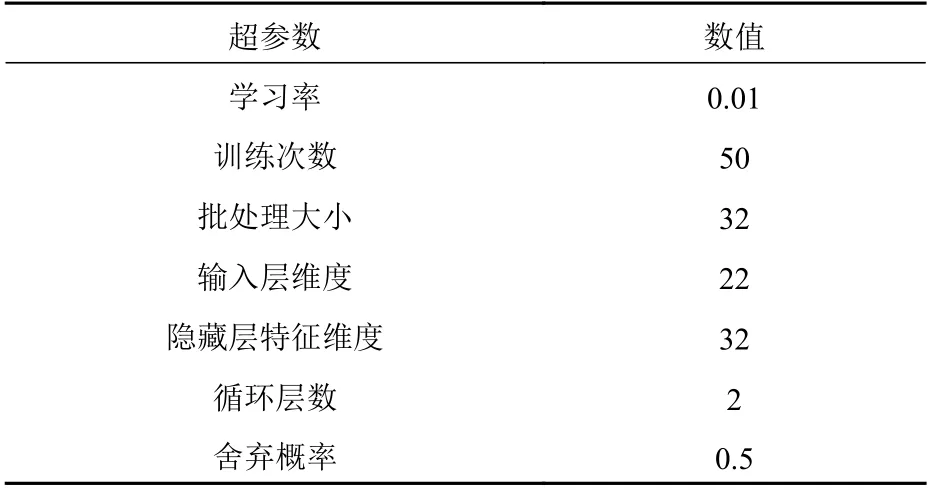
表2 GRU 模型超參數(shù)Table 2 The hyperparameters of the GRU model
2.5 模型性能驗(yàn)證
為了驗(yàn)證GRU 神經(jīng)網(wǎng)絡(luò)模型的性能,本文采用基于小波包變換的多層感知機(jī)神經(jīng)網(wǎng)絡(luò)(WPTMLP)[22]進(jìn)行了對(duì)比。本文所采用WPT-MLP 方法的小波包基函數(shù)為Daubechies wavelet 2(Db2),分解層數(shù)為4 層,將22 個(gè)采集點(diǎn)的加速度響應(yīng)中的損傷特征提取出來,并將1×(22×512)的加速度數(shù)據(jù)提取為1×(22×16)的特征樣本。然后,再由多層感知機(jī)(MLP)訓(xùn)練得到裂紋損傷預(yù)測(cè)結(jié)果,該MLP 的結(jié)構(gòu)和前文所提GRU 的結(jié)構(gòu)相同,并采用同樣的數(shù)據(jù)集、全連接層、優(yōu)化函數(shù)、分類函數(shù)及損失函數(shù)等。
3 裂紋損傷預(yù)測(cè)結(jié)果
本文采用GRU 和WPT-MLP 這2 種方法,將分別針對(duì)裂紋的位置和長(zhǎng)度進(jìn)行研究,同時(shí),還需針對(duì)每個(gè)樣本分別設(shè)置一個(gè)標(biāo)簽,標(biāo)簽數(shù)量與輸出層維度相等。此外,還分別將裂紋的位置和長(zhǎng)度不在訓(xùn)練集中的情況用于測(cè)試,以驗(yàn)證GRU 模型對(duì)裂紋損傷的近似預(yù)測(cè)能力。
3.1 裂紋位置預(yù)測(cè)
針對(duì)裂紋的位置進(jìn)行研究時(shí),輸出層維度為11,標(biāo)簽“0”代表無損工況,“1~5”代表圖2(c)中頂板的5 個(gè)裂紋位置,“6~10”代表底板對(duì)應(yīng)的5 個(gè)裂紋位置。經(jīng)過對(duì)神經(jīng)網(wǎng)絡(luò)模型的訓(xùn)練、驗(yàn)證與測(cè)試,最終對(duì)裂紋位置的預(yù)測(cè)結(jié)果如表3 所示。從中可以看出,GRU 方法在無噪聲情況下對(duì)裂紋位置的預(yù)測(cè)精度達(dá)100%,在有噪聲的情況下其精度為97.14%,均遠(yuǎn)高于WPT-MLP 方法的94.63%(無噪聲)和76.45%(有噪聲)。可見GRU方法具有更優(yōu)的裂紋位置檢測(cè)性能,且對(duì)噪聲的敏感性較低。

表3 裂紋位置預(yù)測(cè)精度Table 3 The prediction accuracy of crack location
同時(shí),為了更直觀地分析神經(jīng)網(wǎng)絡(luò)模型對(duì)每一個(gè)裂紋位置的預(yù)測(cè)情況,本文采用混淆矩陣彩色刻度展示了有噪聲情況的結(jié)果。混淆矩陣中的元素越向主對(duì)角線集中,說明預(yù)測(cè)的效果越好。對(duì)裂紋具體位置預(yù)測(cè)結(jié)果的混淆矩陣如表4 和表5 所示,其中的行和列分別表示裂紋的預(yù)測(cè)位置和實(shí)際位置。從中可以看出,相比WPT-MLP方法,GRU 方法對(duì)各個(gè)位置的預(yù)測(cè)更準(zhǔn)確,僅對(duì)無損狀況的預(yù)測(cè)精度較低,約為91%。
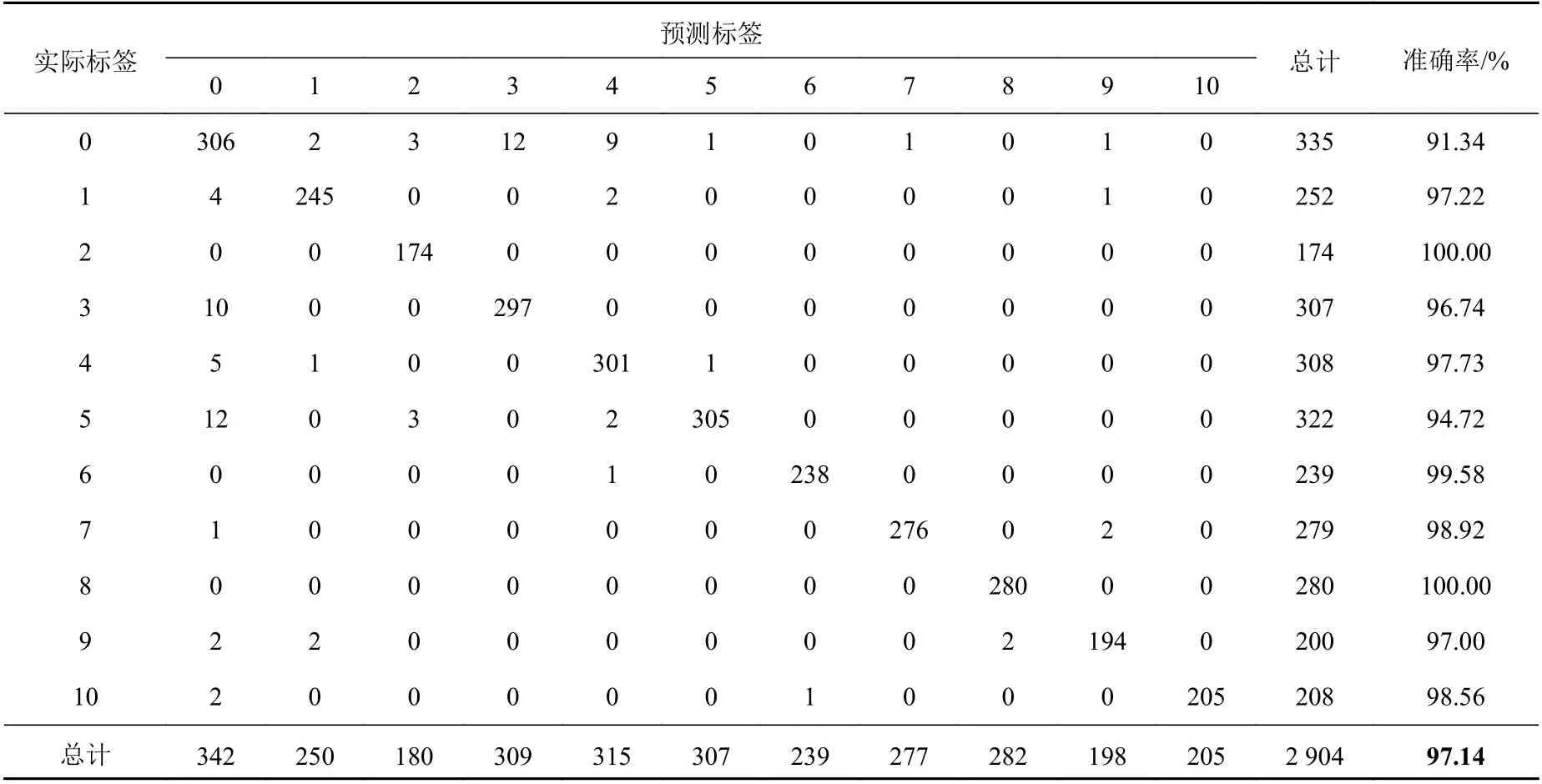
表4 有噪聲情況下GRU 方法對(duì)裂紋具體位置預(yù)測(cè)的混淆矩陣Table 4 Confusion matrix of crack location prediction using GRU method with noise

表5 有噪聲情況下WPT-MLP 方法對(duì)裂紋具體位置預(yù)測(cè)的混淆矩陣Table 5 Confusion matrix of crack location prediction using WPT-MLP method with noise
3.2 裂紋長(zhǎng)度預(yù)測(cè)
對(duì)裂紋長(zhǎng)度進(jìn)行研究時(shí),輸出層維度為4,標(biāo)簽“0”代表無損工況,“1~3”分別代表裂紋長(zhǎng)度為120,240,360 mm。最終,對(duì)位置的預(yù)測(cè)結(jié)果如表6 所示。由表可見,GRU 方法在無噪聲情況下對(duì)長(zhǎng)度的預(yù)測(cè)精度達(dá)96.38%,在有噪聲情況下精度為88.67%,可見采用GRU 方法的定長(zhǎng)精度明顯優(yōu)于WPT-MLP 方法,可以有效提取裂紋長(zhǎng)度損傷特征。

表6 裂紋長(zhǎng)度預(yù)測(cè)精度Table 6 The prediction accuracy of crack length
對(duì)裂紋長(zhǎng)度的預(yù)測(cè)結(jié)果混淆矩陣如表7 和表8所示。從中可以看出,WPT-MLP 方法對(duì)損傷長(zhǎng)度的預(yù)測(cè)不夠理想,遠(yuǎn)不及GRU 方法,且難以預(yù)測(cè)出無損狀況;GRU 方法對(duì)各個(gè)損傷長(zhǎng)度的預(yù)測(cè)比較準(zhǔn)確,但對(duì)無損狀況的預(yù)測(cè)精度較低。同時(shí),GRU 方法預(yù)測(cè)錯(cuò)誤的情況主要集中在無損和120 mm 長(zhǎng)度裂紋的相互識(shí)別上,可見無損與低損傷狀態(tài)的特征具有一定的相似性。
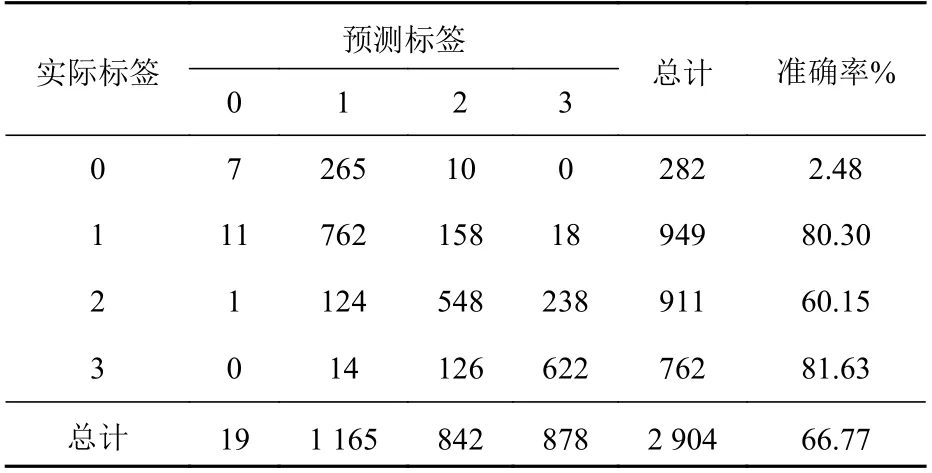
表8 有噪聲情況下WPT-MLP 方法對(duì)裂紋長(zhǎng)度預(yù)測(cè)的混淆矩陣Table 8 Confusion matrix of crack length prediction using WPT-MLP method with noise
3.3 裂紋近似預(yù)測(cè)
上文已驗(yàn)證GRU 模型對(duì)損傷的位置和長(zhǎng)度這2 個(gè)維度均具有較高的預(yù)測(cè)精度,本節(jié)將在已完成的長(zhǎng)度預(yù)測(cè)的基礎(chǔ)上,驗(yàn)證模型對(duì)位置的近似預(yù)測(cè)能力,即針對(duì)裂紋位置不在訓(xùn)練集測(cè)點(diǎn)(3.1 節(jié)所述10 個(gè)位置)時(shí),進(jìn)行無噪聲和有噪聲這2 種情況下的近似預(yù)測(cè)。
假設(shè)已通過長(zhǎng)度預(yù)測(cè)得到裂紋長(zhǎng)度為360 mm,隨后進(jìn)行裂紋位置的近似預(yù)測(cè)。選取裂紋中心在底板6 號(hào)和7 號(hào)中間的5 個(gè)等距位置A~E 上,如圖6 所示,然后分別將其有限元計(jì)算結(jié)果數(shù)據(jù)經(jīng)過2.2 節(jié)所述處理后作為GRU 模型的測(cè)試集。同時(shí),由于已確定裂紋長(zhǎng)度,因此訓(xùn)練集和驗(yàn)證集中可以只保留無損工況和標(biāo)簽“0~10”每個(gè)位置長(zhǎng)度為360 mm 的計(jì)算結(jié)果。
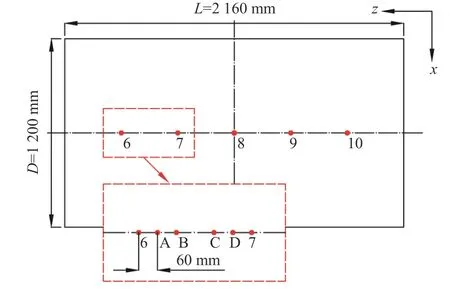
圖6 裂紋位置近似預(yù)測(cè)測(cè)點(diǎn)Fig. 6 Measuring point for approximate prediction of crack location
由于選取的測(cè)點(diǎn)A~D 位于6,7 號(hào)位置中間,因此,本文關(guān)注模型將測(cè)點(diǎn)加速度響應(yīng)數(shù)據(jù)識(shí)別為 6,7 號(hào)的概率。最終的測(cè)試結(jié)果如圖7 所示,由圖可見,GRU 模型可以以較高的精度將訓(xùn)練集以外的位置近似預(yù)測(cè)到與其最接近的訓(xùn)練集測(cè)點(diǎn),且距離訓(xùn)練集測(cè)點(diǎn)越近,預(yù)測(cè)的準(zhǔn)確率越高。針對(duì)有噪聲的情況,當(dāng)測(cè)點(diǎn)距離訓(xùn)練集位置60 mm 時(shí),近似預(yù)測(cè)的精度可以超過90%。同時(shí)還發(fā)現(xiàn),在噪聲的掩蓋下,模型的近似預(yù)測(cè)能力有所下降,且降幅隨關(guān)注點(diǎn)距訓(xùn)練集測(cè)點(diǎn)距離的增大而增大。可以采取提高訓(xùn)練集測(cè)點(diǎn)密度的手段來降低噪聲的影響。
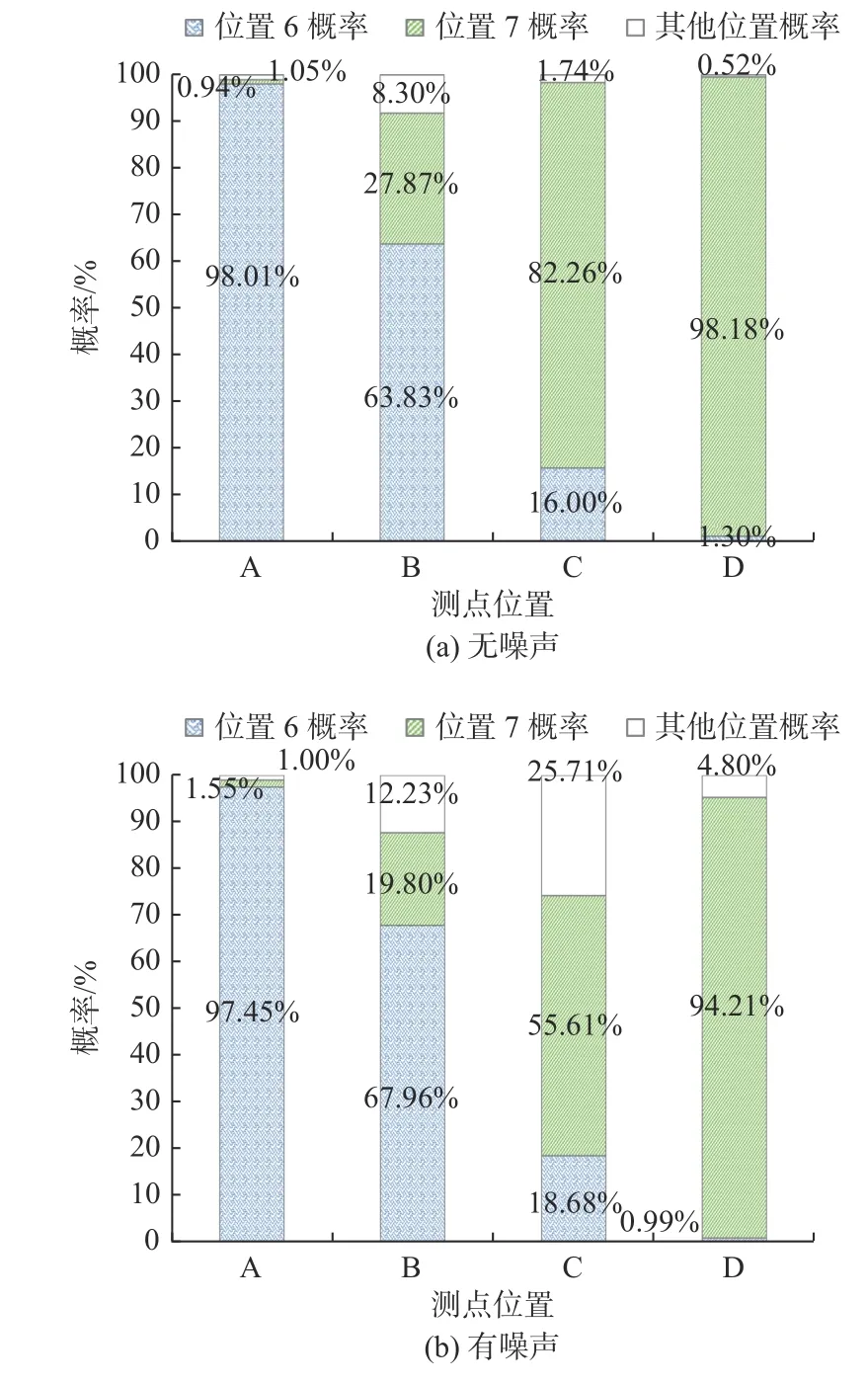
圖7 裂紋近似預(yù)測(cè)結(jié)果Fig. 7 Results of approximate prediction of crack
4 結(jié) 論
本文提出了一種基于GRU 神經(jīng)網(wǎng)絡(luò)的箱型梁結(jié)構(gòu)裂紋損傷檢測(cè)新方法,其可以同時(shí)檢測(cè)箱型梁不同位置處的裂紋位置和長(zhǎng)度。首先,通過Python 語言對(duì)ABAQUS 進(jìn)行二次開發(fā),建立結(jié)構(gòu)有限元模型并計(jì)算得到的加速度響應(yīng);然后通過數(shù)據(jù)擴(kuò)充得到GRU 模型的輸入數(shù)據(jù)集,對(duì)裂紋位置、長(zhǎng)度進(jìn)行研究并與WPT-MLP 方法進(jìn)行對(duì)比;最后,對(duì)模型的近似預(yù)測(cè)能力予以驗(yàn)證。文章主要得到如下結(jié)論:
1) GRU 方法的裂紋損傷特征提取能力強(qiáng),可以較準(zhǔn)確地預(yù)測(cè)裂紋位置及長(zhǎng)度,并具有良好的抗噪聲能力,其各方面的性能均優(yōu)于WPT-MLP方法。
2) 低損傷樣本(120 mm 長(zhǎng)度裂紋)和無損樣本的損傷特征具有一定的相似性。
3) 對(duì)于訓(xùn)練集之外的其他位置,采用GRU方法也可以較準(zhǔn)確地將其識(shí)別到最接近的位置,具有較強(qiáng)的近似預(yù)測(cè)能力。
本文的研究證明了GRU 神經(jīng)網(wǎng)絡(luò)在包含多個(gè)板的箱型梁結(jié)構(gòu)裂紋損傷檢測(cè)工作中的適用性,為未來將深度學(xué)習(xí)應(yīng)用于實(shí)際船舶的損傷檢測(cè)工作中提供了新的思路。未來,可以在本文研究的基礎(chǔ)上繼續(xù)拓展裂紋種類,拓展檢測(cè)維度,繼續(xù)提升GRU 神經(jīng)網(wǎng)絡(luò)的性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:29:16
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12