Sentinel-1A的近海固定設(shè)施和動態(tài)船只識別
2022-09-12 09:25:12朱振宇周乃恩賀少帥
遙感信息 2022年3期
朱振宇,周乃恩,賀少帥
(1.航天彩虹無人機股份有限公司,北京 100074;2.青島海洋科學與技術(shù)國家實驗室發(fā)展中心,山東 青島 266235)
0 引言
合成孔徑雷達(synthetic aperture radar,SAR)是一種全天時、全天候、廣覆蓋、高重訪、中高分辨率的主動成像傳感器[1]。隨著觀測角、頻率、極化、空間和時間分辨率的不斷提升,衛(wèi)星SAR在滿足陸海、軍民需求上將會發(fā)揮越來越多的應(yīng)用價值[2]。海上固定設(shè)施的金屬、混凝土成分和動態(tài)船只的金屬成分的后向散射系數(shù)遠大于海洋的后向散射系數(shù),因此在海洋SAR幅度圖上海洋像素的灰度值一般很小,而海上固定設(shè)施和動態(tài)船只的灰度值一般很大,因此衛(wèi)星SAR具有海洋目標識別、監(jiān)測的工程化應(yīng)用潛力。應(yīng)用價值主要體現(xiàn)在兩個方面:一是動態(tài)船只識別可以用于海洋伏季休漁期非法漁船捕撈監(jiān)督、非法移民監(jiān)控、海洋救援等民用領(lǐng)域;二是海上固定目標和動態(tài)船只的識別可以用于獲取海上軍事設(shè)施的位置,敵方艦船的位置、類型、航向等情報信息,奪取海上戰(zhàn)場主動權(quán)[3]。
二十世紀八九十年代,加拿大、美國、挪威科研人員使用SAR衛(wèi)星(如Seasat-1、ERS-1)成功提取了海上船只目標[4],而后國內(nèi)外科研人員陸續(xù)開展了海洋SAR衛(wèi)星數(shù)據(jù)的船只識別算法研究。如基于K分布的恒虛警概率(constant false alarm rate,CFAR)船只識別算法因簡單易行、適應(yīng)性強而被廣泛應(yīng)用[5],現(xiàn)已被用于加拿大海洋監(jiān)測工作站[6]。隨著SAR成像及其數(shù)據(jù)處理技術(shù)的發(fā)展,SAR影像海上固定目標和動態(tài)船只目標的識別研究得到了科研人員的關(guān)注[7-9]。針對不同應(yīng)用場景和SAR數(shù)據(jù)特點,科研人員對CFAR算法進行了改進,其中雙參數(shù)CFAR算法在良好海況下能夠自動適應(yīng)海雜波背景噪聲的變化且算法簡單、實用效果好[10-12],成為SAR目標檢測中最為常用的算法。
當遇到臺風、洋流、潮汐等較為復雜的海況時,SAR影像將出現(xiàn)局部海雜波,影響海上目標的檢測、識別和提取的精度。另外,以往的研究大都是使用單期SAR單極化數(shù)據(jù)的幅度信息或者多極化數(shù)據(jù)的極化和幅度信息,通過開發(fā)、改進算法將船只與海雜波區(qū)分開,但未考慮海上固定設(shè)施的影響,尤其海上風力發(fā)電場的大小與船只接近的問題。本研究利用多期SAR數(shù)據(jù)的干涉相干性和幅度信息,使用雙參數(shù)CFAR算法和眾數(shù)濾波算法[13],分別開展海上固定設(shè)施和動態(tài)船只識別、提取的工程化應(yīng)用研究。
1 研究區(qū)及數(shù)據(jù)
選取江蘇省南通市如東縣近海區(qū)(位于中國黃海)作為研究區(qū),地理坐標為121°04′ E~121°37′ E,32°26 N~32°59′ N,如圖1中綠色矩形框所示。研究區(qū)內(nèi)建有風力發(fā)電場、碼頭等固定設(shè)施和動態(tài)船只。在研究區(qū)內(nèi),劃定了兩個重點分析區(qū),“重點分析區(qū)1”是近海風力發(fā)電場,可以看到成排成列分布的風力發(fā)電設(shè)施;“重點分析區(qū)2”是近海碼頭,碼頭附近可以看到船只,如圖1紅色矩形框所示。

實驗輔助數(shù)據(jù)是日本基金會最新發(fā)布的15″格網(wǎng)(450 m)全球海陸高程數(shù)據(jù)(the GEBCO_2020 grid),作為數(shù)字高程模型(digital elevation model,DEM)數(shù)據(jù),用于5期Sentinel-1A數(shù)據(jù)之間的精配準和地理編碼。
2 研究方法和結(jié)果
總體技術(shù)方法流程如圖2所示。使用5期Sentinel-1A SAR數(shù)據(jù)之間的干涉相干性和雙參數(shù)CFAR算法與眾數(shù)濾波算法(四鄰域和八鄰域窗口)提取近海海上固定設(shè)施。將海上固定設(shè)施、海雜波強反射區(qū)進行掩膜,使用雙參數(shù)CFAR算法提取動態(tài)船只,并與未考慮掩膜信息的雙參數(shù)CFAR算法、迭代加權(quán)多元變化檢測算法提取的動態(tài)船只結(jié)果進行對比。
2.1 研究方法
1)SAR影像配準和相干計算。同一地區(qū)多期重訪SAR影像之間一般存在10~102量級像素的位置偏移。SAR干涉處理的必要條件是主輔SAR影像的精配準優(yōu)于0.25個像素。一般可以使用衛(wèi)星軌道參數(shù)估算主輔SAR影像之間的初始偏移量進行粗配準。在此基礎(chǔ)上,本研究使用主輔影像相關(guān)性測度的相干系數(shù)法選取主輔影像的同名像點[14],使用最小二乘法分別在距離向和方位向擬合同名像點的偏移量,求得雙線性多項式系數(shù),將輔影像上各像素分別重采樣到主影像坐標空間。
假設(shè)M和S分別是精配準的主、輔影像,選定大小為k×l的滑動窗口,計算滑動窗口內(nèi)像素相干系數(shù)的平均值作為窗口中心像素的相干系數(shù)值[15]。
2)雙參數(shù)CFAR算法。雙參數(shù)CFAR算法應(yīng)用在衛(wèi)星SAR海上目標識別方面是海雜波(如海洋內(nèi)波、洋流、海浪等引起的強反射)和海上目標分別服從不同的幅度統(tǒng)計分布概率密度函數(shù)。設(shè)Pfa為虛警概率,表示海上目標檢測的錯誤概率,那么檢測閾值T的表示如式(1)所示。
(1)
式中:μB和σB分別為局部滑動窗口幅度值的均值和標準差。在Pfa下,當幅度值I大于閾值T時,則該像素判定為海上目標;否則,判定為海面。
雙參數(shù)CFAR算法適用條件有兩個:一是海上目標的SAR像素具有較大和相近的幅度值,具有連續(xù)的空間分布;二是海雜波的SAR像素在幅度值和空間分布上是隨機的、無規(guī)律的。
3)Frost濾波和眾數(shù)濾波算法。Frost濾波算法是目前最為通用的基于局部統(tǒng)計特性的自適應(yīng)濾波算法。Frost濾波算法假設(shè)斑點噪聲是乘性噪聲,并假設(shè)SAR影像是平穩(wěn)過程。Frost濾波的沖擊響應(yīng)為雙邊指數(shù)函數(shù)[16]。
在海雜波較為極端復雜時,雙參數(shù)CFAR算法提取的海上目標虛警率較高。因此,本實驗對雙參數(shù)CFAR算法獲取的二值圖進行眾數(shù)濾波處理。在GIS應(yīng)用中,眾數(shù)濾波是指某一像素及其鄰域像素的所有像素值組成了一個離散數(shù)值集合{x1,x2,…,xn},那么,出現(xiàn)頻率最高的數(shù)值xi為該像素的像元值。本實驗離散數(shù)值集合為{0,1},Sentinel-1A多視后空間分辨率為15 m,海上船只大小一般在2個像素及以上,因此滑動窗口選定四鄰域和八鄰域。
4)迭代加權(quán)多元檢測(iteratively reweighted MAD,IR-MAD)算法。為了改進多元變化檢測(multivariate alteration detection,MAD)算法[17]的去噪效果和實現(xiàn)變化閾值的自動獲取,Nielsen[18]提出了IR-MAD算法。IR-MAD算法通過迭代加權(quán)計算自動獲取變化閾值,是一種非監(jiān)督變化檢測方法。
2.2 數(shù)據(jù)處理和結(jié)果
SAR像對相干性受多種因素影響,如時空基線、傳感器工作頻率、天氣和視場環(huán)境等。時空基線越小,傳感器工作波長越大,則相干性越高。云霧雨天氣以及視場內(nèi)植被、河湖等地物會降低相干性,而穩(wěn)定的建筑物則會提高相干性。因此,如果數(shù)據(jù)量豐富,則可通過控制時空基線進行SAR像對組合。考慮成像時間應(yīng)避開海洋伏季休漁期和結(jié)冰期,本研究選出2020年9月27日—2020年11月14日的5期Sentinel-1A影像,數(shù)據(jù)量適中。考慮相干性受成像環(huán)境(大氣、海況等)影響,因此不再控制時空基線優(yōu)選干涉像對,而是對這5期SAR影像進行兩兩組合,共形成10個干涉像對。
分別對5期覆蓋研究區(qū)的SAR影像進行感興趣區(qū)(region of interest,ROI)裁剪、影像粗配準和精配準、干涉組合和相干計算、雙參數(shù)CFAR算法處理、眾數(shù)濾波、多視處理、海雜波強反射邊界提取等數(shù)據(jù)處理。
首先提取近海海上固定設(shè)施。裁剪后的5期VV、VH雙極化SAR影像兩兩組合,共可以形成10個VV和10個VH極化干涉對。對20個干涉對組合進行精配準和相干計算。使用雙參數(shù)CFAR算法提取具有強干涉相干性的固定設(shè)施,得到二值化相干圖。使用四鄰域和八鄰域眾數(shù)濾波器交互式迭代處理二值化相干圖,直到固定設(shè)施像素的變化個數(shù)小于固定設(shè)施像素總個數(shù)的1%時停止,則得到固定設(shè)施提取結(jié)果。圖3和圖4第一列為VV極
化干涉對提取的固定設(shè)施,第二列為VH極化干涉對提取的固定設(shè)施,第三列為雙極化干涉對提取的固定設(shè)施,即對VV和VH極化干涉對提取的固定設(shè)施取并集;白色像素代表海上固定設(shè)施,黑色像素代表海域。對10個雙極化干涉對提取的固定設(shè)施矢量邊界取并集,得到“總干涉對”提取的固定設(shè)施結(jié)果,如圖5所示。
之后提取動態(tài)船只目標。對裁剪后5期SAR SLC影像進行方位向1×距離向4的多視處理,得到空間分辨率為方位向13.95 m×距離向14.72 m的VV、VH雙極化SAR幅度圖。對5期幅度圖進行Frost濾波處理,濾波窗口大小為7×7,得到降噪后幅度圖。使用GEBCO_2020數(shù)據(jù)將SAR坐標系的降噪后幅度圖地理編碼到WGS1984 UTM坐標系。
IR-MAD算法提取動態(tài)船只。由于IR-MAD算法提取的結(jié)果是兩期影像的變化目標,不考慮噪聲情況下,則是兩期的動態(tài)船只。因此在多時相SAR組合設(shè)計上,首先,使用第1期影像分別與第2~5期影像進行變化檢測,分別得到“1期+2期”“1期+3期”“1期+4期”和“1期+5期”動態(tài)船只;然后,使用第2期影像與第3期影像進行變化檢測,得到“2期+3期”動態(tài)船只;接著,使用OTSU算法和眾數(shù)濾波對變化檢測結(jié)果進行自動閾值分割和濾波處理,提取矢量邊界;最后,用“1期+2期”矢量邊界對“2期+3期”矢量邊界做擦除(erase),得到第1期動態(tài)船只,分別用“1期+2期”“1期+3期”“1期+4期”和“1期+5期”矢量邊界對第1期動態(tài)船只矢量邊界做擦除,得到第2期、第3期、第4期、第5期動態(tài)船只。IR-MAD算法最大循環(huán)次數(shù)設(shè)置為30,停止迭代的最小變化率閾值設(shè)置為0.001。分別對每期VV、VH幅度圖進行以上處理,再對提取的結(jié)果取并集作為每期動態(tài)船只,如圖6所示。
雙參數(shù)CFAR算法提取動態(tài)船只目標。設(shè)置船只大小為2~134個像素,直接使用雙參數(shù)CFAR算法和眾數(shù)濾波從5期UTM坐標系VV、VH幅度圖提取船只,對每期VV、VH幅度圖提取的船只目標取并集,結(jié)果如圖7第二列所示,而第一列表示VV極化幅度圖。將固定設(shè)施和人工提取的海雜波強反射區(qū)進行掩膜,設(shè)置船只大小為2~134個像素,使用雙參數(shù)CFAR算法和眾數(shù)濾波從5期UTM坐標系VV、VH幅度圖提取船只,對每期VV、VH幅度圖提取的船只取并集,結(jié)果如圖7第三列所示。
3 分析與討論
3.1 固定設(shè)施
圖3和圖4橫向?qū)Ρ龋懈缮鎸V、VH提取的固定設(shè)施可分為三類:第一類是VV提取,而VH未提取;第二類是VH提取,而VV未提取;第三類是VV、VH同時提取,該類數(shù)量遠大于第一類和第二類數(shù)量之和。實驗結(jié)果表明:海上固定設(shè)施的結(jié)構(gòu)和所處環(huán)境會共同決定其對不同極化方式雷達波的后向散射特性;同極化(VV)與交叉極化(VH)SAR數(shù)據(jù)提取的海上固定設(shè)施可互為驗證和補充,因此在海上固定設(shè)施檢測、識別方面極化信息具有重要價值。圖3和圖4縱向?qū)Ρ龋煌瑫r相組合的干涉對提取的固定設(shè)施在數(shù)量和分布上存在差別,這是因為不同時相組合的影像對在雷達成像時受到海況、天氣和時空基線的影響不同。
如圖8所示,在“重點分析區(qū)1”內(nèi),海上風力發(fā)電場為固定設(shè)施,在時間序列上能保持較好穩(wěn)定性,因此在任意兩期影像之間具有較高相干性。將SAR干涉相干性提取的94個近海風力發(fā)電場與2020年天地圖影像進行比對,風力發(fā)電場被全部提取(如圖8紅色輪廓所示),錯提個數(shù)為9個(如圖8藍色輪廓所示)。因此,SAR干涉相干性提取近海風力發(fā)電場的正確率達到90.4%,虛警率為9.6%,漏檢率為0。
3.2 動態(tài)船只目標
由圖7第一列可知,5期SAR影像VV幅度圖都存在不同程度的海雜波,VH幅度圖亦然,因篇幅原因,未在文中展示。由圖7第二列可知,直接使用雙參數(shù)CFAR算法和眾數(shù)濾波從VV和VH幅度圖提取了動態(tài)船只并取并集,得到的雙極化動態(tài)船只結(jié)果存在較大虛警率,主要原因有兩個:海上固定設(shè)施和動態(tài)船只都表現(xiàn)出了較強的后向散射;復雜海況引起的海雜波。由于動態(tài)船只在時間序列上位置不定,所以其任意兩期SAR的相干理論值為零,因此可通過使用SAR幅度和相干性提取近海動態(tài)船只。將海雜波強反射區(qū)和SAR干涉相干提取的固定設(shè)施掩膜,使用雙參數(shù)CFAR算法和眾數(shù)濾波從VV和VH幅度圖提取了動態(tài)船只并取并集,如圖7第三列所示。SAR幅度圖提取的動態(tài)船只基本消除了海上固定設(shè)施和海雜波強反射的干擾。
圖6是直接對多時相SAR雙極化幅度圖使用IR-MAD算法變化檢測算法提取的船只目標。對比圖6和圖7可知,IR-MAD算法提取的船只目標存在較大虛警率,這主要是因為受到海雜波強反射的影響。
在“重點分析區(qū)2”內(nèi),為了有效分析輸入掩膜的雙參數(shù)CFAR算法和IR-MAD算法提取的動態(tài)船只目標的精度,本文使用船舶自動識別系統(tǒng)(automatic identification system,AIS)數(shù)據(jù)進行對比、統(tǒng)計。通常船只會安裝AIS系統(tǒng),通過該系統(tǒng)船舶能夠在公用無線信道上向附近船舶和岸上主管機關(guān)持續(xù)發(fā)送其身份、位置、航向、航速等信息。本文所用AIS數(shù)據(jù)為船隊在線HiFleet提供,包括MMSI(maritime mobile service identify)數(shù)字碼、接收時間、船只航向和方位、經(jīng)緯度坐標、船只類型等信息。2020年11月14日24小時的AIS數(shù)據(jù)與“重點分析區(qū)2及周邊區(qū)域”疊加展示如圖9所示。SAR干涉相干提取的近海海上碼頭設(shè)施和IR-MAD算法、輸入掩膜的雙參數(shù)CFAR算法提取的碼頭附近船只如圖10所示,其中紅色輪廓為SAR干涉相干提取的海上碼頭設(shè)施,白色輪廓為船只目標。
分別提取2020年9月27日、10月9日、10月21日、11月2日和11月14日的9點55分時刻的AIS數(shù)據(jù)與本文算法所提取的5期船只目標比對分析,如圖10所示,圖中白色不規(guī)則多邊形為本文算法提取的船只目標,黃色點為AIS數(shù)據(jù)顯示船只。通過統(tǒng)計分析可知,輸入掩膜的雙參數(shù)CFAR算法和IR-MAD算法都存在一定的漏檢現(xiàn)象,輸入掩膜的雙參數(shù)CFAR算法平均漏檢率為3.34%,IR-MAD算法平均漏檢率為7.65%,IR-MAD算法的虛警率為16.39%,遠高于輸入掩膜的雙參數(shù)CFAR算法2.29%的虛警率。由此可知,輸入掩膜的雙參數(shù)CFAR算法提取的船只目標結(jié)果優(yōu)于IR-MAD算法變化檢測算法提取結(jié)果,詳見表1。
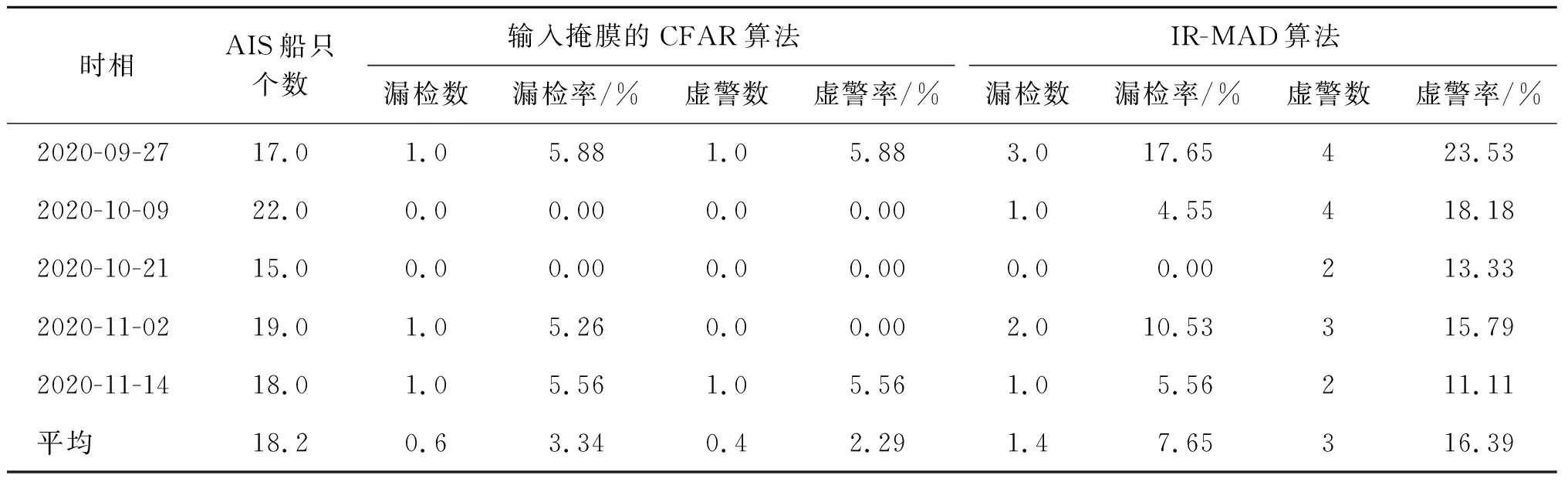
表1 輸入掩膜的CFAR算法、IR-MAD算法提取船只統(tǒng)計分析
4 結(jié)束語
針對近海海上固定設(shè)施和動態(tài)船只較難通過SAR幅度信息有效區(qū)分的問題,尤其是海上風力發(fā)電場的大小與船只接近,本研究以江蘇省南通市如東縣近海區(qū)(位于中國黃海)作為實驗區(qū)。首先,利用5期SAR數(shù)據(jù)之間的干涉相干性,采用雙參數(shù)CFAR算法和眾數(shù)濾波算法,有效提取了海上固定設(shè)施,如風力發(fā)電場和碼頭等。之后,人工提取VV、VH極化幅度圖出現(xiàn)的海雜波強反射區(qū),將海上固定設(shè)施和海雜波強反射區(qū)掩膜,使用雙參數(shù)CFAR算法和眾數(shù)濾波器從VV和VH極化強度圖提取了動態(tài)船只并取并集,得到了5期SAR數(shù)據(jù)海上船只,并與未考慮使用掩膜信息的雙參數(shù)CFAR算法和眾數(shù)濾波器直接提取的海上船只進行了對比。最后,分析和討論了本研究實驗結(jié)果,在“重點分析區(qū)1”,SAR干涉相干提取的近海風力發(fā)電場的正確率為90.4%,虛警率為9.6%,漏檢率為0;在“重點分析區(qū)2”,給出了碼頭附近5期AIS數(shù)據(jù),通過與輸入掩膜的CFAR算法、IR-MAD變化檢測算法的動態(tài)船只提取結(jié)果對比可知,輸入掩膜的CFAR算法提取的船只平均漏檢率為3.34%,平均虛警率為2.29%,IR-MAD算法變化檢測算法平均漏檢率為7.65%,平均虛警率為16.39%,輸入掩膜的CFAR算法提取的船只目標結(jié)果優(yōu)于IR-MAD算法變化檢測算法。
本實驗所用總體技術(shù)方法適用于海域場景的海上固定設(shè)施和動態(tài)船只的識別,同時為陸域場景的固定設(shè)施(如建筑物)和動態(tài)目標(如車輛、飛機等)的識別研究提供參考。后續(xù)研究重點,計劃開展SAR極化分解模型的海雜波強反射區(qū)提取研究,從而實現(xiàn)近海海上固定目標(如風力發(fā)電場、碼頭等)和動態(tài)船只識別和提取的自動化、工程化應(yīng)用。
致謝:感謝歐洲航天局提供的Sentinel-1A數(shù)據(jù),感謝日本基金會提供的全球海陸高程數(shù)據(jù),感謝“天地圖·江蘇”提供的2020年光學影像。
