吸氣式高速飛行器爬升-巡航軌跡在線優化
2022-09-13 05:50:14侯忻宜李惠峰
宇航總體技術 2022年4期
侯忻宜,李惠峰
(北京航空航天大學宇航學院,北京 100191)
0 引言
吸氣式高速飛行器一般由渦輪或沖壓發動機提供動力,可充分利用大氣層內的氧氣進行高效率巡航飛行。吸氣式高速飛行器要經歷長時間遠距離的高速飛行,因此需要合理地設計優化軌跡,以滿足不同任務形式的需要。在線自主軌跡優化有利于提高飛行器的自適應和自主決策能力。
目前針對吸氣式高速飛行器的軌跡規劃研究分別集中在爬升段和巡航段。楊志紅等針對吸氣式高速飛行器爬升軌跡規劃問題,采用高斯偽譜法離散,并用序列二次規劃方法求解問題。Zhou等、龔春林等、趙長見等針對吸氣式推進和火箭推進的組合動力運載器的上升段軌跡規劃問題進行了研究。Liu等采用粒子群和序列二次規劃算法求解最優穩態巡航條件。Kang等采用遺傳算法和直接打靶法解決了一種考慮燃油消耗和熱流率最小的多目標周期巡航軌跡優化問題。Gao 等通過擬合特定周期函數的參數,將偽譜法用于周期巡航軌跡規劃問題中。相關研究主要集中在縱向穩態巡航和周期巡航這種固定飛行模式的優化問題中,但是當軌跡規劃任務涉及目標到達和禁飛區規避時,這種固定的飛行形式限制了飛行器性能的發揮,并且難以在線應用。對于無動力再入的情況,Liu等、Wang等、Wang等采用基于凸優化的方法對此進行了研究,但是并未考慮吸氣式飛行器的推力與狀態量之間的相互影響。
本文針對飛行器在三維空間中的運動和目標到達任務,將原最優控制問題凸化和離散化,轉化為一系列凸問題進行求解,設計算法的外環迭代策略。
數值仿真實驗表明,該方法具有可行性,并且相比于非線性規劃算法,在性能指標近似相等的情況下可以大大縮短優化時間,證明了其針對吸氣式高速飛行器的軌跡優化問題的最優性和在線應用的能力。
1 優化問題模型
1.1 任務描述
對于采用沖壓發動機作為動力的吸氣式高速飛行器,一般需要經歷機載發射和火箭助推段,助推段結束后關機分離,飛行器進入超燃沖壓發動機工作窗口。傳統的軌跡設計思路是引導飛行器爬升到固定的高度,然后進行穩態巡航飛行。這種軌跡形式需要進行一定的約束,并且巡航段的飛行模式較為固定,性能難以達到最優。針對這種情況,設計了如圖1所示的吸氣式高速飛行器的爬升-巡航飛行任務剖面,將飛行器的高度和速度約束放寬,在發動機工作窗口內尋找最優解,有利于最大限度發揮飛行器的能力,得到最優飛行軌跡。優化階段從發動機點火開始,到達目標上空時結束。
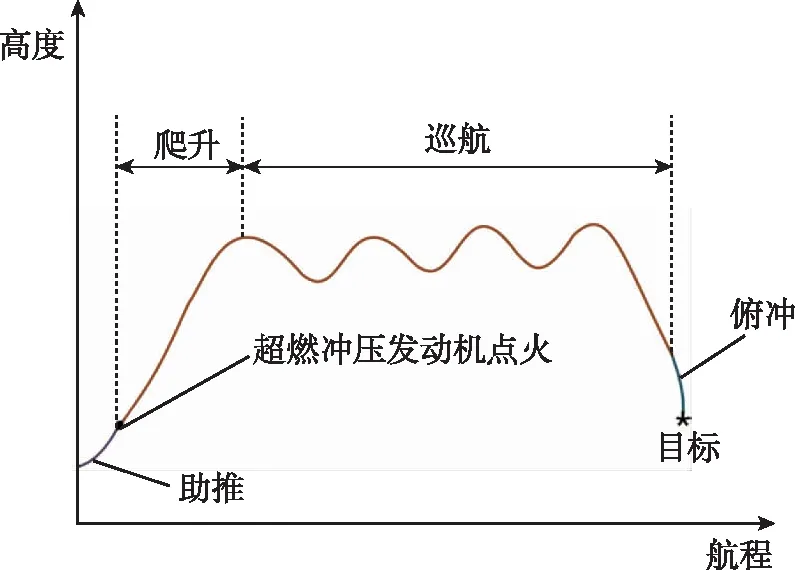
圖1 吸氣式高速飛行器任務剖面圖Fig.1 Mission profile of the air breathing high velocity vehicle
1.2 數學模型建立
本文研究飛行器的質心運動模型,將地球視為均質圓球,考慮地球曲率的影響,建立無量綱化后的三自由度運動方程如下
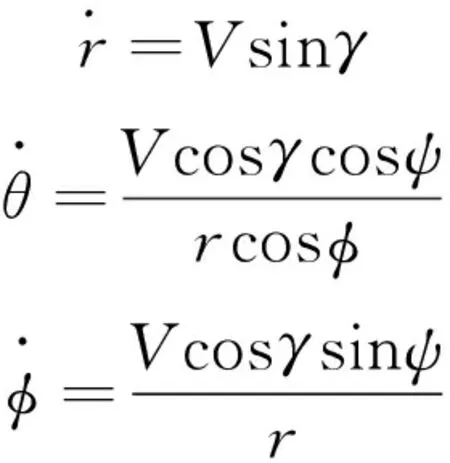




sinsinsin)

2(tansincos-sin)-
(1)
升力和阻力用海平面重力加速度無量綱化,具體表達式如下
(2)
式中,升力系數和阻力系數是關于攻角和馬赫數的函數,為飛行器的參考面積,取值為1 m。為大氣密度,本文采用“準等溫”大氣模型,為海平面的大氣密度,為基準高度,取值為7.11 km,大氣密度可表示為高度的函數
(3)
沖壓發動機的推力和燃料秒耗量一般與飛行器的高度、馬赫數、攻角和燃油當量比有關,可以表示為=(,,,),=(,,,),根據飛行器和發動機模型進行插值或者擬合得到。
1.3 最優控制問題建模
1.2節給出了飛行器的運動方程以及相應的狀態量和控制量。本節將建立相應的最優控制問題模型。飛行器的狀態變量選取為=[,,,,,,],控制變量選取為=[,,]。
1)性能指標:在飛行器總航程固定的情況下,優化指標設置為飛行器到目標時的終端質量最大
Minimize:=-
(4)
2)運動方程:1.2節式(1)所示的運動方程,用狀態量和控制量寫為緊湊形式
(5)
約束條件:優化的初始狀態為助推段結束時的狀態,此時飛行器進入沖壓發動機開機窗口。初始狀態=[,,,,,,]中的參數也相應進行無量綱化處理,約束如下
()=
(6)
式中,=+表示時刻飛行器的地心距,和是飛行器初始時刻所處的經度和緯度,,和分別為時刻的速度大小、飛行路徑角和航向角,為飛行器在時刻的質量。
飛行器在巡航段末端需要到達目標點,用經緯度表示為(,),終端時刻處的經度和緯度為()和(),因此終端時刻的約束條件為
()=,()=
(7)
受沖壓發動機開機條件限制,飛行器的攻角需要保持在一定范圍內,和分別為攻角能夠取得的最小值和最大值。發動機的燃油當量比∈[,],本文中的范圍取為[02,1]。和分別為地心距的下限和上限。和為維持發動機工作所需要的最小速度和最大速度。為飛行器初始質量,表示飛行器的凈質量。狀態量和控制量的不等式約束形式如(8)所示
≤≤,≤≤,
≤≤,≤≤,
≤≤
(8)
一般來講,飛行器在巡航飛行段可能會遇到禁飛區,用經度和緯度表示禁飛區的圓心位置,表示半徑,禁飛區不等式約束如下
(-)+(-)≥
(9)
式中,和分別為禁飛區圓心的經度和緯度,為禁飛區半徑,以弧度為單位。
綜上所述,飛行器巡航段軌跡優化問題可建模為如下形式的最優控制問題Problem1。
Problem1:
Minimize:(4)
Subject to:(5)(6)(7)(8)(9)
2 軌跡優化算法
2.1 最優控制問題線性化



(10)
式中



(11)

在性能指標中加入控制量鄰近項

(12)

=+
(13)

(14)
可以看出,式(12)經過松弛后,轉換為如式(13)和(14)所示的線性形式的性能指標和不等式約束,相應地得到Problem2。
Problem2:
Minimize:(13)
Subject to:(10)(6)(7)(8)(11)(14)
2.2 離散化
在最優控制問題Problem2中,狀態變量和控制變量均為關于時間的連續函數,采用一階保持器離散方法將狀態量和控制量進行離散化處理。
取離散點數目為,初始時間為,終端時間為,間隔為Δ=(-)(-1),相應的離散時間點為=+(-1)Δ,=1,2,…,。將控制輸入參數化為樣本點之間的線性函數

(15)
經過狀態轉移離散后的系統為
+1=+1+2+1+,
=1,2,…,-1
(16)
其中系數矩陣為

(17)
式(10)的線性微分方程轉化為式(16)所示的線性等式約束,其中待優化的變量只有和。
對于存在禁飛區的情況,將式(11)表示的約束離散化,得到線性不等式約束


(18)
然后,對式(14)也進行離散化處理

(19)
離散后的=[1,2,…,],式(19)可進一步寫為

(20)
將式(20)轉化為標準的二階錐約束形式
(21)
Problem3是一個標準的二階錐規劃問題,它屬于迭代算法中的一個子問題,優化變量包括狀態量={,,,,,,}和控制量={,,},=1,2,…,以及參數,=1,2,3。
Problem3:
Minimize:-+++
Subject to:
=,=,=


≤≤,≤≤,
≤≤,≤≤,
≤≤,=1,2,…,
(22)
2.3 序列凸優化迭代算法
序列凸優化算法偽代碼見表1,選取離散形式的兩次迭代地心距之差最大值作為誤差,當兩次迭代結果之間的誤差小于規定值時,可認為軌跡收斂。

表1 算法偽代碼Tab.1 Algorithm pseudocode
序列凸優化算法的流程如圖2所示。
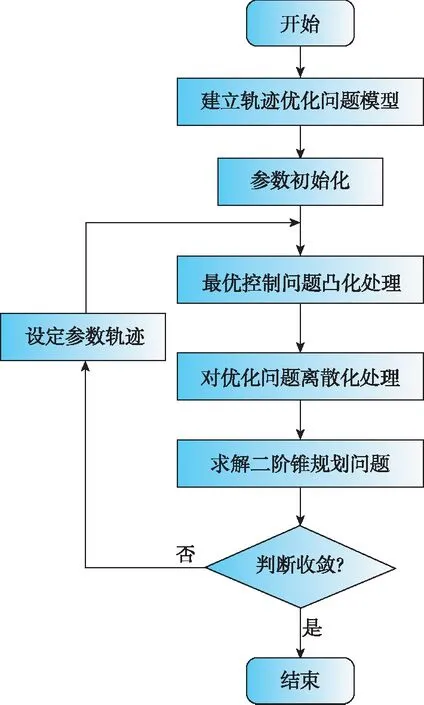
圖2 算法流程圖Fig.2 Algorithm flow chart
3 數值仿真算例
針對某型吸氣式高速飛行器進行巡航段的軌跡優化數值仿真實驗,優化階段包括沖壓發動機從開機到關機的整個飛行過程,飛行時間為920 s。
飛行器的初始高度為20 km,速度為1 200 m/s,質量為5 000 kg,初始經緯度和飛行路徑角分別為0°,航向角為30°。終端經度和緯度分別為9.5°和5.5°。飛行過程中高度的取值范圍為20~30 km,速度范圍為1 200~1 800 m/s,攻角范圍為0°~5°,燃油當量比范圍為0.2~1,飛行器凈質量為4 000 kg。
仿真中采用的參數如表2所示。經緯度初始參考選為初始位置和終端位置兩點連線。質量的初始參考設計為從飛行器總質量到凈質量的線性變化形式,燃油當量比的初始參考也采用從到的線性變化形式。其他狀態量和控制量的初始參考無特殊要求,一般為初始時刻的常值即可。
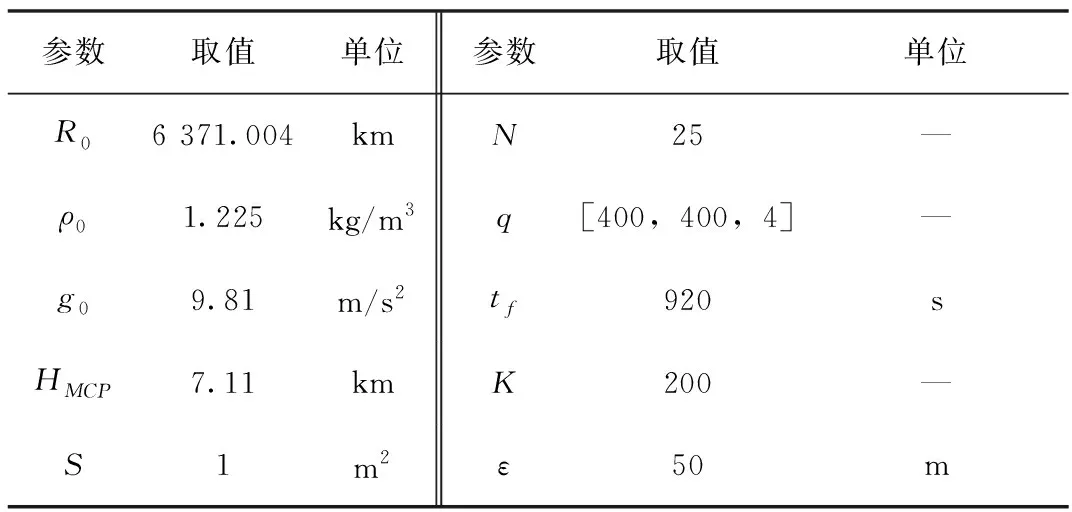
表2 仿真參數值Tab.2 Simulation parameters
采用MATLAB軟件進行數值仿真實驗,實驗用筆記本電腦處理器型號為i5-10210U,主頻為1.60 GHZ,每次迭代的二階錐規劃問題采用ECOS求解器進行求解,當最大位置誤差小于時迭代結束。軌跡優化算法經過19次迭代后,相鄰兩次迭代的位置誤差小于規定值,算法終止,仿真耗時0.065 4 s,滿足在線軌跡優化的要求。使用GPOPS工具箱的優化結果作為最優參考,優化時間為12.713 4 s,共進行了3次網格自適應迭代,網格劃分精度為10。
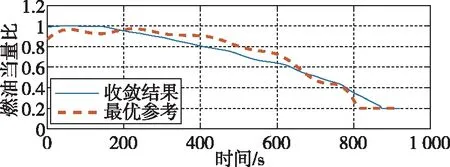
圖3和圖4分別為狀態量和控制量曲線的收斂結果與最優參考的對比,可以看出飛行器完成了目標到達任務,軌跡形式與預期一致。在20 km高處,發動機點火,飛行器開始爬升,在26 km附近進行波動飛行,受攻角條件和發動機推力約束限制,飛行高度在24~30 km范圍內變化,接近目標上空時高度下降至23 km。優化結果曲線和GPOPS結果曲線變化趨勢一致,收斂至近似局部最優解,仿真結果證明了算法的最優性。
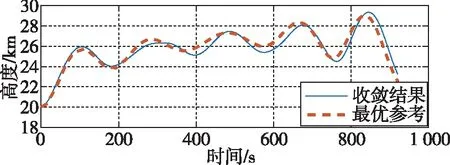
(a) 高度-時間曲線
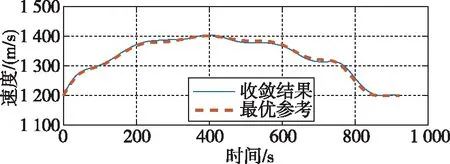
(b) 速度-時間曲線

(c) 質量-時間曲線圖3 狀態量對比圖Fig.3 Comparison of state
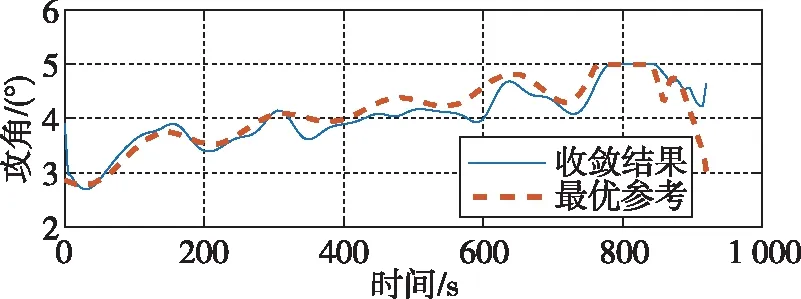
(a)攻角-時間曲線
(b) 燃油當量比-時間曲線

(c)推力-時間曲線圖4 控制量對比圖Fig.4 Comparison of control
從圖3中可以看出,飛行器的高度和速度均滿足約束,處于沖壓發動機開機窗口范圍內。質量變化曲線圖顯示,終端燃料剩余142 kg,GPOPS優化結果為144 kg,相差只有2 kg,二者優化得到的性能指標差異約為1%。
從圖4可以看出,飛行器的攻角約束滿足,在2°和5°之間變化。燃油當量比隨時間增加逐漸從1變為0.2,與初始參考的變化趨勢一致,相應的推力變化范圍為0~30 kN,隨節流系數的增加,推力總體呈下降趨勢。
圖5為終端質量性能指標隨迭代次數的變化曲線圖,在經過19次迭代后,終端質量達到4 142 kg,此時迭代結束。圖6顯示了相鄰兩次迭代的位置和速度的誤差絕對值的最大值隨迭代次數變化的曲線。位置和速度誤差在迭代初期變化較大,后期逐漸減小,最后一次迭代和上一次迭代之間的差值分別為7.6 m和0.11 m/s,證明軌跡收斂。圖7顯示了相鄰兩次迭代的攻角和燃油當量比的誤差絕對值的最大值隨迭代次數變化的曲線。攻角誤差曲線在前期有小范圍的波動,11次迭代后小于10。燃油當量比誤差曲線在2~12次迭代之間略有波動,與其他變量相比收斂難度更大,但12次迭代后趨于收斂。仿真結果表明軌跡收斂效果良好。
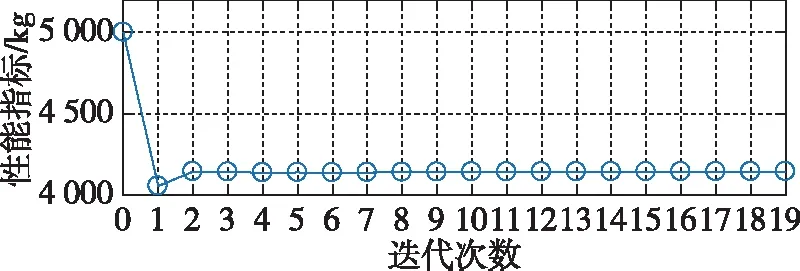
圖5 性能指標隨迭代次數變化圖Fig.5 Value of the performance index at each step
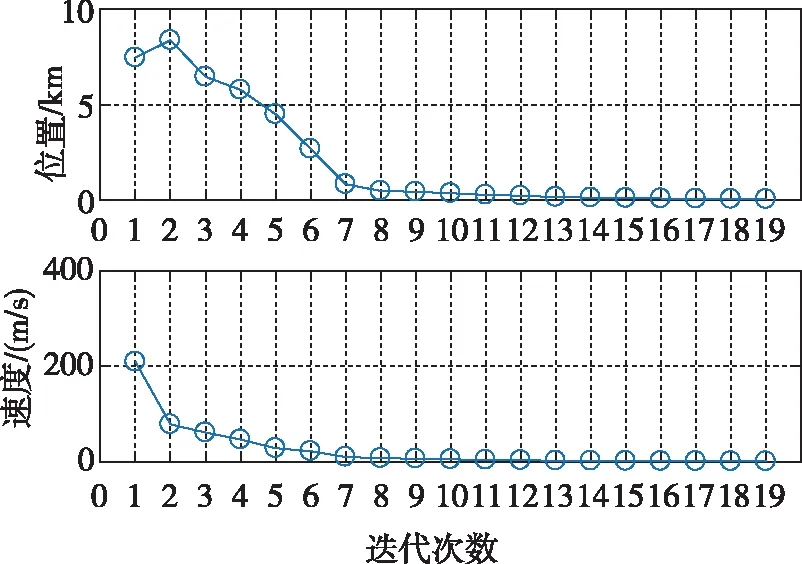
圖6 位置和速度誤差隨迭代次數變化圖Fig.6 Position and velocity error at each step
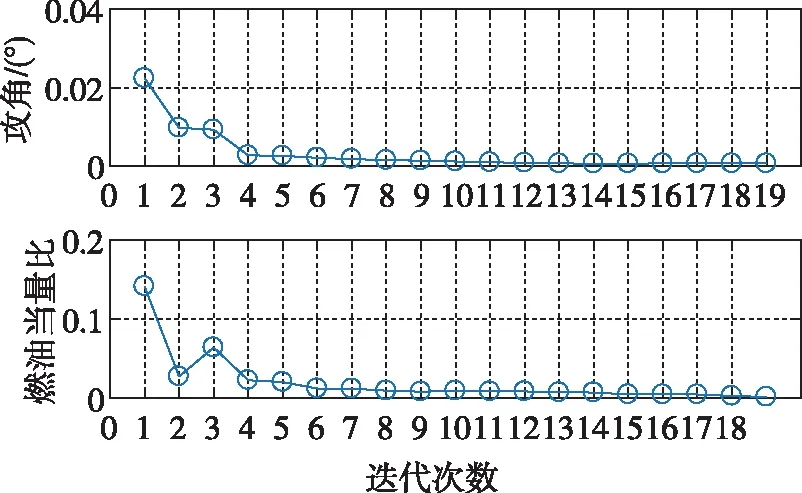
圖7 攻角和燃油當量比誤差隨迭代次數變化圖Fig.7 AoA and throttling coefficient error at each step
作為對比,采用GPOPS進行多階段軌跡優化,將不同工況下采用爬升+穩態巡航方式的優化結果列在表3中。表格中的數據分別表示不同巡航高度和速度下,飛行器到達目標時剩余燃料的質量。表3中巡航高度為26 km時,最大的剩余燃料質量為65 kg,相比于圖2的終端剩余燃料142 kg,爬升+穩態巡航的飛行方式多消耗燃料約7.7%。仿真結果證明,本文提出的爬升巡航優化軌跡比穩態巡航軌跡更省燃料,飛行器具有更大的能力應對突發狀況或進行后續機動。

表3 穩態巡航優化結果Tab.3 Steady-state cruise optimization results
對于存在禁飛區約束的情況,算法步驟同上。本文設置3個禁飛區,在經緯度圖中表示禁飛區中心和半徑,如表4所示。
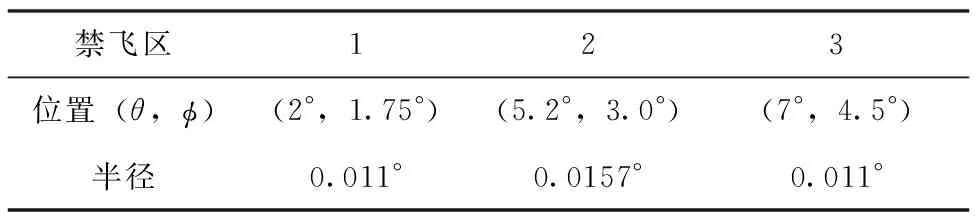
表4 禁飛區中心和半徑Tab.4 Center and radius of the no-fly zone
圖8為優化得到的經緯度圖,圖中黑色虛線表示初始參考軌跡,紅色點劃線表示算法迭代兩次后得到的軌跡,藍色實線表示最終收斂結果。仿真結果表明,飛行器能夠完成禁飛區規避任務,到達目標點,算法求解時間0.088 5 s,滿足巡航段在線軌跡優化要求。
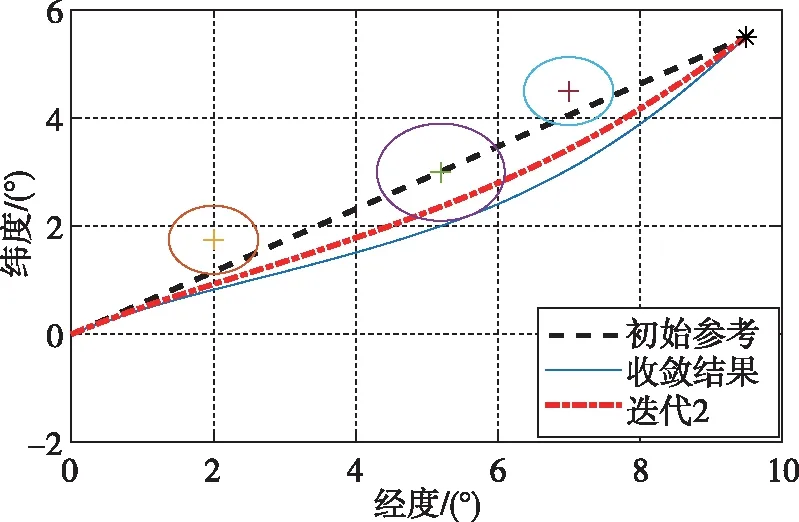
圖8 經度-緯度圖Fig.8 Longitude-latitude
4 結論
1)對吸氣式高速飛行器進行了爬升巡航段在線軌跡優化,將爬升段和巡航段作為整體進行優化,擴大了飛行器的高度和速度約束范圍。爬升巡航整體優化得到的軌跡燃料消耗更小,飛行器具有更大的能力應對突發狀況或進行后續機動,避免了傳統的定高定速巡航的軌跡形式具有的局限性。
2)設計基于凸優化的序列優化算法在線求解軌跡優化問題,將原最優控制問題在參考軌跡處進行凸化和離散化后,轉化為標準的二階錐規劃問題,基于內點法進行求解。數值仿真實驗表明,該算法的求解時間滿足在線軌跡優化的要求。算法求解得到的軌跡與最優參考接近,性能指標相差僅為1%,驗證了算法的最優性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15