生物質熱電廠化學吸收碳捕集控制策略改進
2022-09-13 01:03:50劉圣春胡長征董貝貝
潔凈煤技術 2022年9期
劉圣春,胡長征,董貝貝
(1.天津商業大學 天津市制冷技術重點實驗室,天津 300134;2.瑞典梅拉達倫大學 商業、社會和技術學院,瑞典 韋斯特羅斯 72123)
0 引 言
為將全球溫升控制在1.5 ℃以內,作為CO2最大排放國,我國承諾力爭于2030年前達到碳達峰,于2060年前實現碳中和[1]。結合我國能源結構和賦存特點,碳的負排放技術(NETs)對于實現碳中和目標至關重要[2]。在眾多NETs中,帶有碳捕集和封存的生物質能利用(BECCS)由于能大規模從大氣中去除CO2,逐漸成為排放密集型行業和部門脫碳最佳解決方案[3]。《中國二氧化碳捕集利用與封存(CCUS)年度報告(2021)》預測,我國在2060年實現碳中和目標需通過BECCS減排3億~6億t CO2[4]。
BECCS由生物質能利用和CO2捕集等環節組成。在生物質能利用過程中,生物質熱電廠貢獻了全球70%以上的生物質能發電量[5]。對于CO2捕集技術,化學吸收碳捕集技術因其適用于CO2中低濃度煙氣而廣泛應用于燃燒后捕集[6-8]。其中,第1代單乙醇胺(MEA)碳捕集技術成熟度已達到7~8級,實現商業化[9],并成功應用于中試生物質熱電廠[10]。目前,絕大部分BECCS研究將煙氣流量和組成作為定值考慮,模擬也以構建穩態模型為主[11-14]。然而,電廠實際運行過程是動態變化的,造成基于穩態簡化的結果與實際運行相差較大。針對碳捕集系統動態性能研究主要集中在從化石燃料利用過程中捕集CO2。BUI等[15]回顧了基于化學吸收的燃燒后捕集(CA-PCC)動態研究發展,指出CA-PCC工藝的靈活操作是解決高能源需求與成本問題的有效手段。CA-PCC過程靈活操作的關鍵是深入了解其瞬態性能并為其設計適當的控制策略。WU等[16]對近年CA-PCC控制策略進行調研,指出目前對于控制策略的研究大多基于穩態優化,未考慮動態過程中CO2捕集水平的變動或上游電廠運行工況變化對系統性能的影響;強調了控制策略的設計要符合CA-PCC系統的運行要求,使CA-PCC能在干擾下保持給定捕集水平運行。
現今BECCS中基于MEA化學吸收的碳捕集系統(BE-MEA)普遍延用化石燃料利用過程中捕集CO2的傳統控制策略。然而,相較于成分較穩定的煤,生物質成分多變,導致進入BE-MEA的煙氣中CO2濃度變化更大。此外,生物質常應用于熱電廠,熱電廠頻繁變化的發電負荷導致煙氣流量存在較大波動[17]。同時,作為向BECCS過渡的重要手段,煤與生物質混燒電廠的煙氣流量和煙氣中CO2濃度變化還受燃料配比顯著影響[18],故要求BE-MEA控制策略具有良好的抗干擾性能。由于缺少對BE-MEA動態性能及控制策略的研究,傳統控制策略在面對生物質熱電廠復雜的煙氣變化時,將BE-MEA保持給定捕集率運行的能力尚未確定。此外,目前多數控制策略研究基于吸收塔內被吸收的CO2量(去除率)[8,16-20],并未考慮從解吸塔中解吸出來的CO2量(捕集率)。由于CA-PCC的滯后性,捕集率對再沸器負荷的變化更敏感,能更全面反映系統運行狀態[21-22]。
綜上所述,筆者將構建化學吸收碳捕集動態模型,根據實際生物質熱電廠運行數據,從捕集率角度對傳統控制策略應用于生物質熱電廠碳捕集時的控制性能進行評估,并以恒定捕集率為目標對再沸器負荷控制策略進行改進。同時,通過對比多個性能參數,從控制性能、靈活操作性能和捕集系統性能3方面對控制策略進行評價,從多角度分析動態仿真和傳統穩態模擬的區別,旨在研究生物質煙氣變化對胺基化學吸收碳捕集系統的影響,尋求適用于BE-MEA的控制策略,提升BE-MEA的動態性能,為生物質熱電廠和BE-MEA的集成優化提供參考。
1 模型描述及驗證
1.1 模型及控制器描述
利用Aspen HYSYS建立的胺基化學吸收CO2捕集(MEA-CC)工藝流程如圖1所示。煙氣從吸收塔底部進入,CO2與塔頂流下的MEA貧液發生反應。吸收了CO2的溶液(富液)在解吸塔再沸器內被加熱,實現溶液再生和CO2解吸。再生后的溶液經MEA和水補充后被送回吸收塔循環利用。為使BE-MEA能在外界干擾下實現設定的捕集目標,模型集成了經典分布式比例積分微分(PID)控制器(圖1虛線)。為使被控變量——再沸器溫度保持在設定值,選用再沸器負荷為控制變量,通過溫度控制器TIC2調節。為保持去除率恒定,模型中加入了流量控制器FIC1以調節貧液流量。圖1各控制器的被控變量和控制變量見表1。
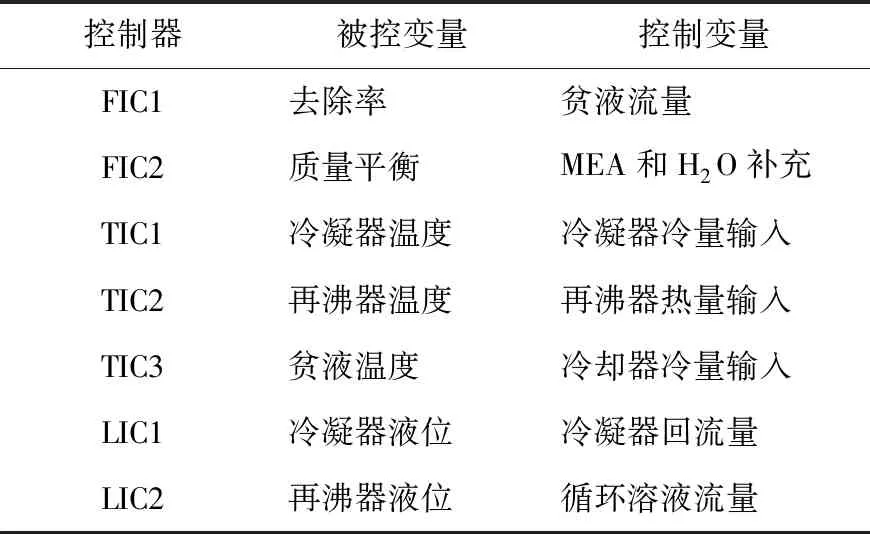
表1 各控制器的被控變量和控制變量Table 1 Controlled and manipulated variables of controllers

圖1 胺基化學吸收CO2捕集工藝流程Fig.1 Flow chart of MEA-based chemical absorption CO2 capture
采用HARUN等[23-24]開發的動態模型,基于雙膜理論,以速率模型描述吸收塔和解吸塔中的氣液傳質過程。在高度方向對塔進行微分(Δz),單位體積內組分i的質量平衡方程為
(1)
(2)
(3)

單位體積內的能量平衡方程為
(4)
(5)
qg=hgl(Tl-Tg),
(6)
ql=-qg+ΔH(CO2)+ΔH(H2O)。
(7)
其中,Tg、Tl分別為氣相和液相溫度,K;qg、ql分別為氣相和液相通過氣-液界面傳遞的熱量,J/(m3·s);Cp,i為組分i的定壓比熱容,J/(mol·K);hgl為氣-液界面換熱系數,W/(m2·K);ΔH(CO2)、ΔH(H2O)分別為CO2的反應熱和H2O的汽化熱,J/(m3·s)。動態模型各輸入參數見表2。
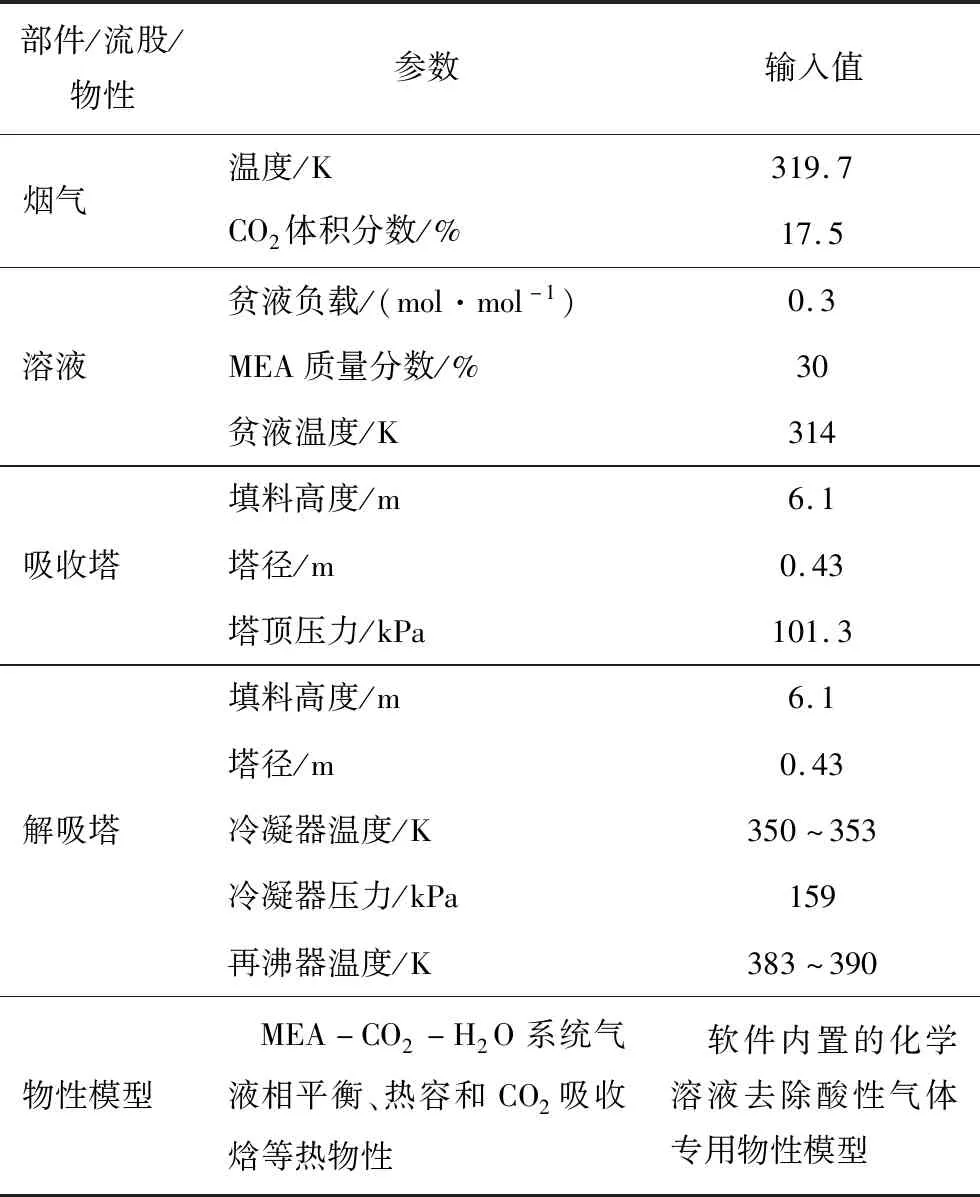
表2 動態模擬輸入值[22-23]Table 2 Input values of dynamic simulation[22-23]
1.2 化學吸收碳捕集動態模型驗證
為驗證上述模型的準確性,采用與HARUN等[23]相同的煙氣變化,基于煙氣流量擾動進行動態模擬。320 K、CO2體積分數17.5%時,煙氣變化如圖2所示,系統穩定運行12 min后,煙氣流量在2.8 h內線性減小5%,隨后保持不變直至結束。將模擬得到的去除率、再沸器溫度和再沸器負荷與HARUN等[23]研究結果對比。
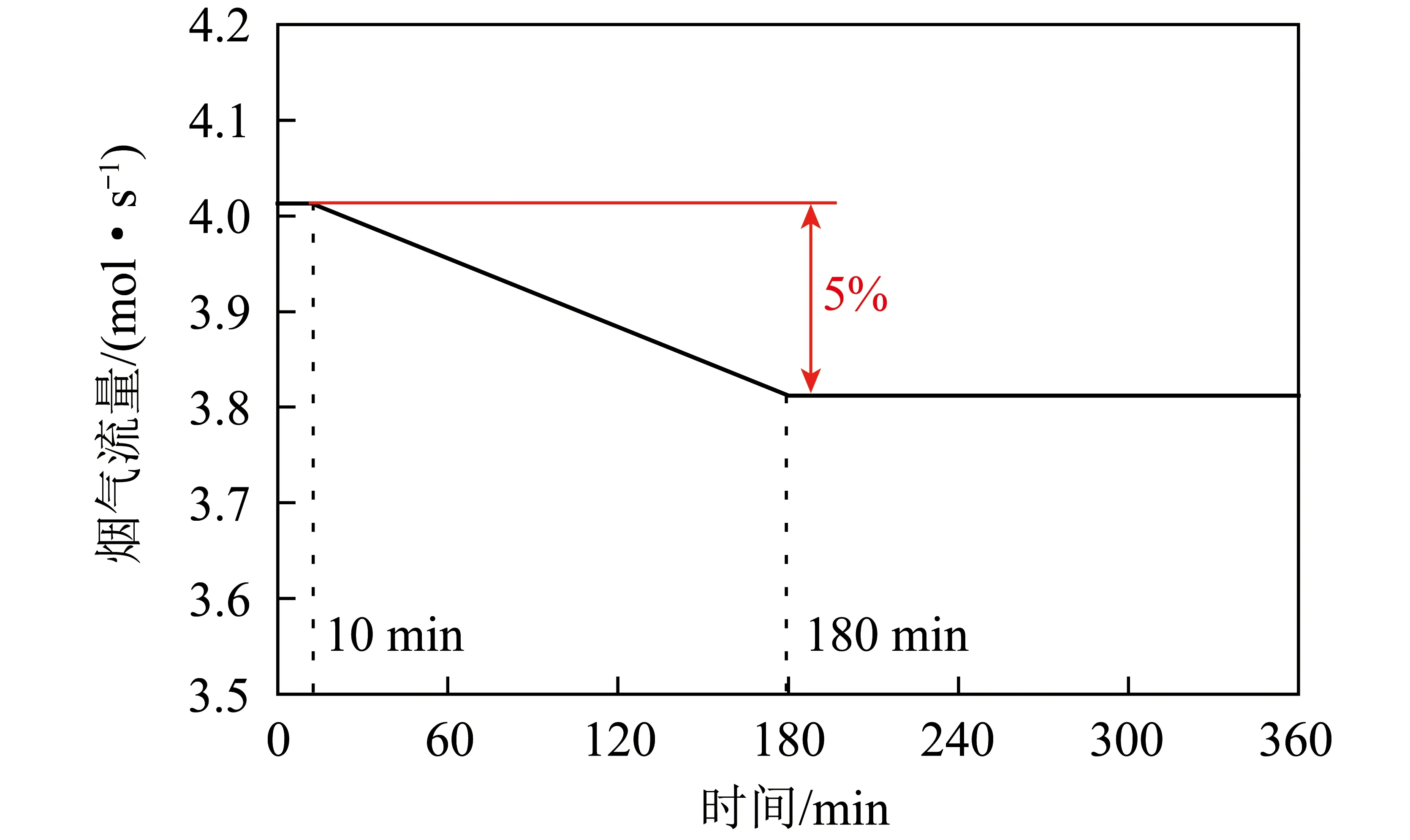
圖2 煙氣流量變化Fig.2 Change of flowrate of flue gas
由于生物質熱電廠煙氣進入捕集系統前已經過凈化,假設凈化后煙氣中的氯化物、NOx和SOx等微量雜質體積分數已降至10-6級別,對捕集系統影響較小,因此本文只考慮主要煙氣成分CO2、O2、H2O和N2。其中,O2會造成MEA氧化降解,但MEA氧化降解的損耗遠低于MEA隨吸收塔和解吸塔氣相產物流出造成的運行損耗,因此本模型只考慮系統運行中MEA和H2O的運行損耗,并通過流量控制器FIC2進行補充。
1.2.1 去除率驗證
CO2去除率對比結果如圖3所示,吸收塔及相關控制策略有效抑制了煙氣波動對吸收塔的影響,保持去除率恒定。本模型的去除率略低于HARUN等[23]研究結果,這是由于本模型再沸器壓力未規定具體數值,僅由塔頂冷凝器壓力與解吸塔水力學計算得出,因此再沸器壓力較低。當貧液流量及再沸器負荷與HARUN等[23]研究結果相同時,較低的再沸器壓力意味著較低的再沸器溫度和較高的貧液負載,導致去除率較低。本模型的去除率驗證誤差為1.59%~1.62%,因此本模型的吸收塔及相關控制策略可用來預測MEA溶液吸收CO2的動態過程。
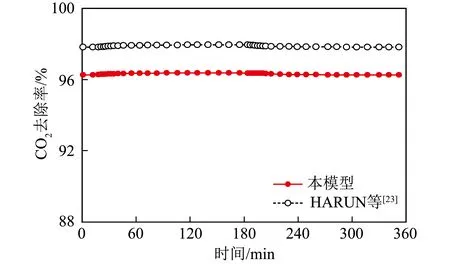
圖3 CO2去除率驗證Fig.3 Validation about CO2 removal rate
1.2.2 再沸器負荷與再沸器溫度驗證
再沸器溫度與再沸器負荷對比如圖4、5所示。煙氣流量變化時,TIC2能調節再沸器負荷保持再沸器溫度恒定。由于本模型的再沸器壓力略低于HARUN等[23]再沸器壓力,使再沸器溫度較低,存在3.8~3.9 K的誤差。
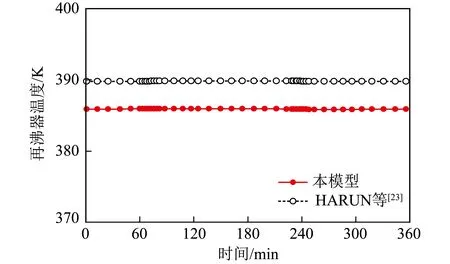
圖4 再沸器溫度驗證Fig.4 Validation about reboiler temperature
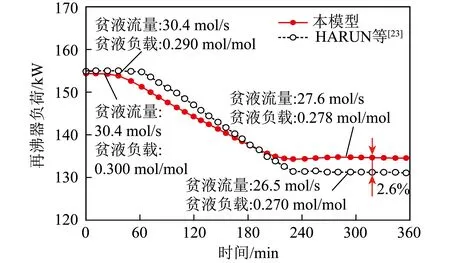
圖5 再沸器負荷驗證Fig.5 Validation about reboiler duty
煙氣流量降低時,CO2再生所需熱量隨之下降,為保證再沸器溫度恒定,TIC2會相應調節再沸器的熱量輸入,使再沸器負荷隨煙氣流量的變化而變化。與文獻[23]相比,由于本模型未考慮換熱器的儲液量,因此本模型的TIC2對煙氣流量變化的響應時間更短,再沸器負荷會更早調節。煙氣變化前期,本模型更低的再沸器負荷使得貧液負載下降更少。去除率恢復到設定值時,本模型所需貧液流量更多,再沸器負荷更高,誤差增至2.6%。由于再沸器溫度和再沸器負荷的驗證誤差均在可接受范圍,因此本模型的解吸塔及相關控制邏輯可用來預測MEA富液再生和CO2解吸的動態過程。
2 再沸器負荷傳統控制策略
MEA-CC系統中,受再沸器負荷影響顯著的再沸器溫度決定了貧液負載,貧液負載代表了溶液對CO2的捕集能力[25]。因此,再沸器負荷能否對外界擾動做出及時、準確的響應決定了捕集系統的動態運行性能。重點分析了圖1中再沸器負荷的傳統控制策略應用于BE-MEA時的控制性能,并以調節時間和最大溫度偏差為指標,評估了經典分布式控制策略對BE-MEA的性能影響。性能指標定義為:① 調節時間:捕集率達到并穩定在穩定值±2%內所需時間;② 最大溫度偏差:再沸器溫度與其設定值間最大偏差。
再沸器負荷傳統控制策略(控制策略A)如圖6所示,再沸器負荷僅由再沸器溫度偏差控制。通過設定控制策略A的目標再沸器溫度,使PID控制器可根據外界擾動造成的再沸器溫度與其設定值間的偏差相應地調節再沸器負荷,以達到所需貧液負載,從而獲得與恒定去除率相等的捕集率。

圖6 控制策略AFig.6 Control strategy A
使用驗證后的模型,以一家瑞典生物質熱電廠煙氣作為輸入,對控制策略A的控制性能進行分析。該電廠循環流化床鍋爐以廢木材為燃料,處理廢木材0.48 Mt/a,產生50 MW電力和150 MW熱能。由于驗證模型的規模較小,采用與CHINEN等[21]相同措施,將生物質熱電廠煙氣流量等比例縮放至模型適用范圍,煙氣組分保持不變,縮放后煙氣流量與組分如圖7所示。
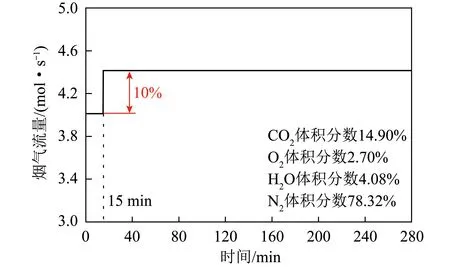
圖7 煙氣流量階躍變化Fig.7 Step change of flue gas flow rate
捕集率和再沸器溫度變化如圖8所示,煙氣流量變化時,吸收塔通過調節貧液流量迅速響應,保持去除率恒定的同時,造成溶液流量及溶液再生所需熱量波動。然而,受限于較大的儲液量,再沸器溫度對溶液流量的變化并不敏感[26]。導致控制策略A對煙氣變化的響應時間較長、對再沸器負荷的調節速度較慢,使再沸器負荷與溶液再生所需熱量不能及時匹配,造成捕集率波動較大,調節時間較長。同時,由于再沸器熱慣性較大,響應滯后的再沸器負荷需更長時間來修正再沸器溫度[26],導致再沸器溫度偏差更大。此外,捕集率與恒定去除率間的偏差會造成循環溶液內的CO2增加或減少,導致貧液負載不穩定,不利于捕集系統高效運行。
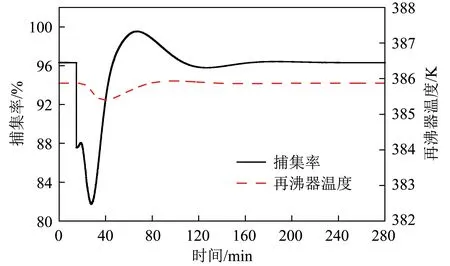
圖8 捕集率與再沸器溫度變化Fig.8 Change of capture rate and reboiler temperature
3 再沸器負荷控制策略改進
為解決控制策略A對煙氣變化響應時間長、再沸器負荷調節速度慢、再沸器溫度和捕集率波動過大等問題,對控制策略A進行改進,通過引入前饋補償來提升控制性能,以實現捕集率恒定控制。
3.1 前饋+反饋控制策略
WU等[16]基于CA-PCC控制領域的深入調研指出:將前饋補償與反饋控制結合是提高分布式控制策略控制性能的有效途徑。CHEN等[27]將煙氣流量作為前饋補償,可在再沸器溫度不變時,根據煙氣流量變化直接控制再沸器負荷,從而提高捕集系統抗干擾能力,但未考慮溶液流量變化的影響。綜合考慮煙氣和溶液流量變化,將同時反映二者變化的富液波動作為前饋信號的優先選擇。作為解吸塔唯一物料輸入,富液決定了CO2再生所需熱量。因此,參考CHEN等[27]研究成果,以控制策略A為基礎,選取富液流量波動作為前饋信號。前饋補償可根據富液流量波動直接調節再沸器負荷,以縮短再沸器負荷調節的響應時間;提高再沸器負荷的調節速度;提升再沸器負荷調節的準確性,實現捕集率恒定。前饋補償和控制策略A組成的前饋+反饋控制策略(控制策略B)如圖9所示。

圖9 控制策略BFig.9 Control strategy B
在Aspen HYSYS中,前饋補償傳遞函數[28-29]見式(8)、(9)。對解吸塔進行開環測試,分別測試了富液流量和再沸器負荷階躍變化對再沸器溫度的影響。基于一階純滯后模型對測試結果量化處理,得出本模型適用的前饋補償傳遞函數見式(10)。
(8)
(9)
(10)
其中,Off為前饋補償輸出值(閥門開度%);t為時間,min;Kp為比例增益;τp1為超前時間,min;τp2為滯后時間,min;d為死區時間,min;Dv為富液流量,mol/s;Dv,max、Dv,min分別為富液流量的最大值和最小值,mol/s。2種控制策略的被控變量和控制變量見表3。
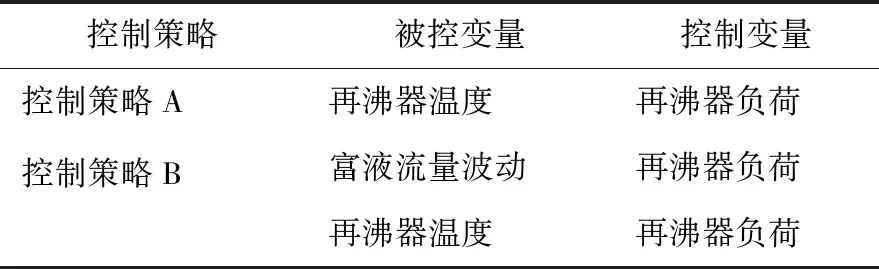
表3 2種控制策略的被控變量及控制變量Table 3 Controlled and manipulated variablesof two control strategies
3.2 控制性能分析對比
為對比分析2種控制策略對捕集系統的影響,使用驗證后模型,引入圖7煙氣變化,評估上述2種控制策略的控制性能。本文各PID控制器的整定均為手動調節:先逐漸增大比例作用,直至出現震蕩,隨后調節積分作用直至震蕩消除。控制策略B的整定是在控制策略A整定基礎上,加入式(10)中前饋補償傳遞函數的各參數。2種控制策略的捕集率和再沸器溫度設定值均為96%和385.83 K。
2種控制策略下再沸器溫度變化如圖10所示,由于存在時間延遲,控制策略A的再沸器溫度起初并未改變,隨后下降了0.47 K,并在穩定前存在波動。時間延遲是由PID控制器基于誤差調節特性造成。控制策略B中,前饋補償會根據富液流量波動輸出額外信號,即刻增加再沸器負荷。因此,再沸器溫度升高了0.07 K。
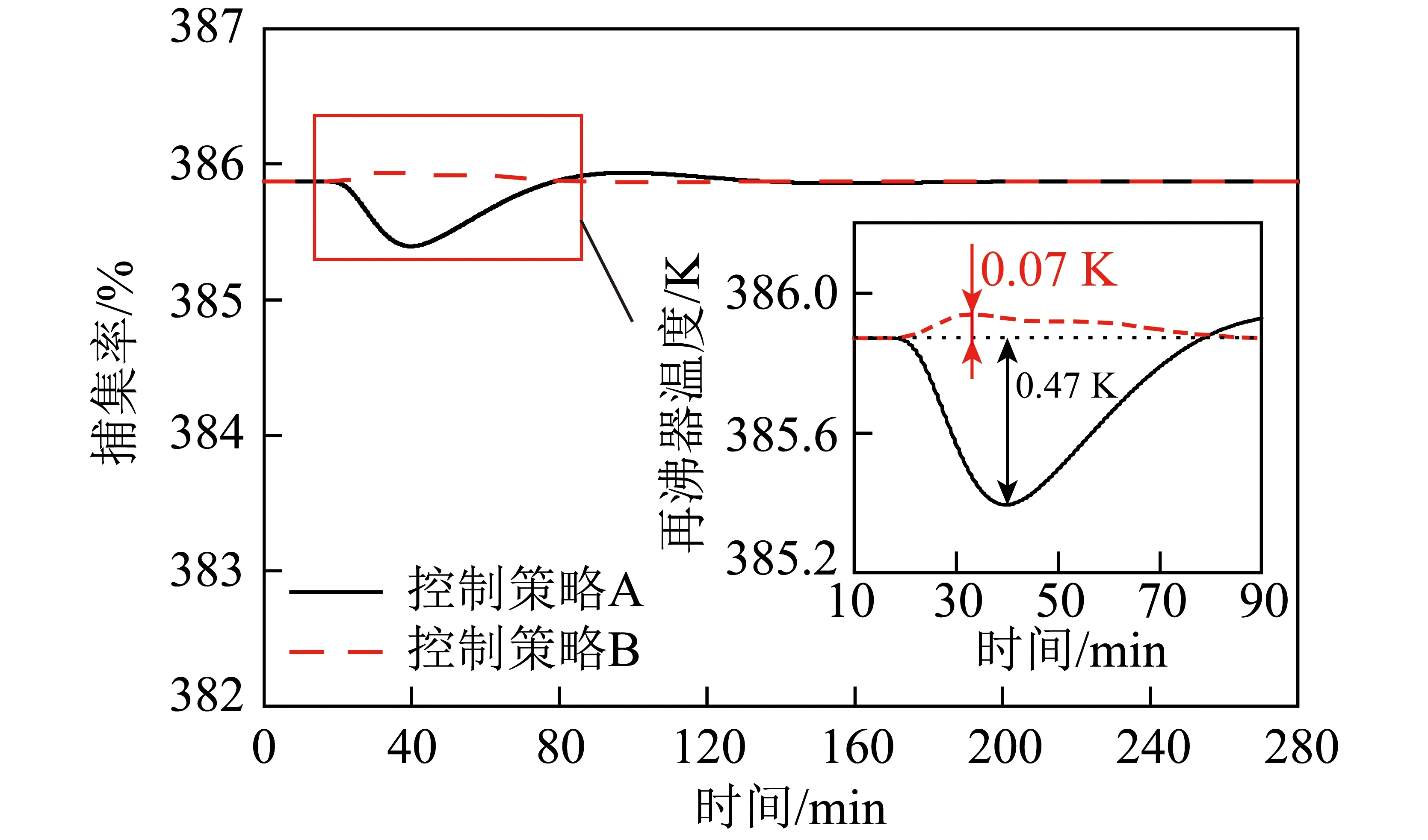
圖10 2種控制策略下再沸器溫度變化Fig.10 Responses of reboiler temperature under the both control strategies
再沸器溫度最直觀反映了再沸器負荷與CO2解吸所需熱量的匹配情況,即使再沸器溫度波動很小,但仍能說明捕集率大幅變化,與文獻[30]結論相似。再沸器的溫度波動越大,捕集率降低越多,回升時間越晚,回升速度越慢。2種控制策略的捕集率變化如圖11和表4所示。煙氣流量增加時,延遲時間內解吸出的CO2并未改變,2種控制策略的捕集率均下降,然而控制策略A的再沸器溫度偏差較大,導致其捕集率繼續下降,回升時間推遲,回升速度變慢。控制策略B的再沸器溫度偏差較小,捕集率下降后隨溫度升高立刻回升。

圖11 2種控制策略下捕集率變化Fig.11 Responses of capture rate under both control strategies
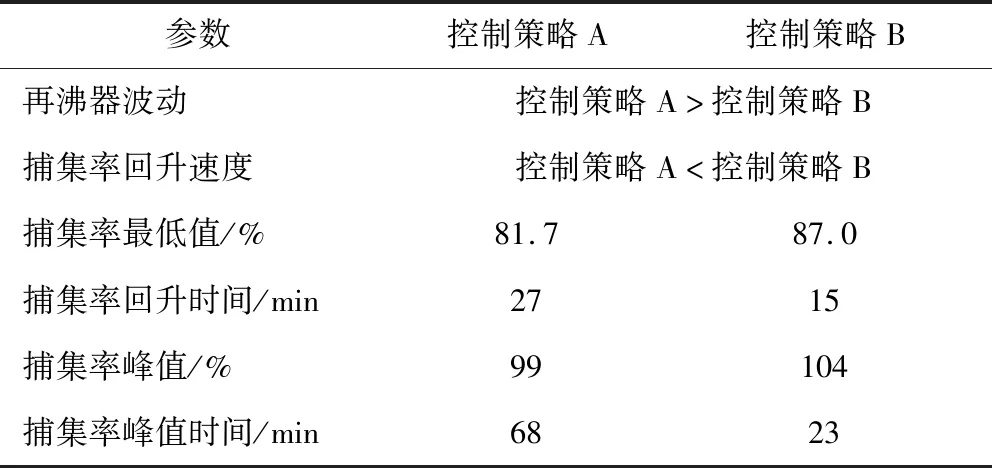
表4 2種控制策略下捕集率變化Table 4 Responses of capture rate with both control strategies
評估2種控制策略的控制性能,結果見表5。控制策略B的前饋補償有效提升控制性能,將調節時間縮短了54 min,抑制了再沸器溫度波動。
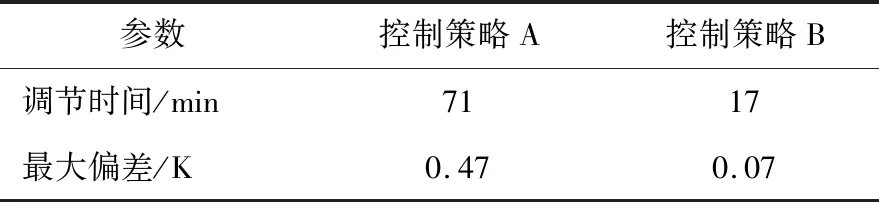
表5 2種控制策略下捕集率變化Table 5 Responses of capture rate with both control strategies
4 靈活操作性能分析對比
由于熱電廠售電價格和用電需求的實時變化,熱電廠能供給再沸器的熱量頻繁改變。這種變化要求捕集系統能快速、平穩改變CO2捕集水平,及時適應上游電廠擾動[16-17]。以捕集率恢復穩定所需時間為指標,對2種控制策略的靈活操作性能進行對比。為減小其他因素的影響,假設:① 模擬過程中煙氣流量和CO2濃度恒定;② BE-MEA穩定運行10 min后,將捕集率設定值在2 h內從96%線性減小至90%;③ 通過改變去除率設定值實現捕集率靈活操作。
2種控制策略對捕集率設定值的跟隨結果如圖12所示。去除率設定值降低時,FIC1會減少溶液流量,以獲得與設定值相等的去除率。隨溶液流量降低,溶液再生所需熱量減少。控制策略A由于調節時間過長,無法及時減小再沸器負荷,導致捕集率升至99%后才開始下降;受BE-MEA非線性影響,固定的前饋補償傳遞函數導致控制策略B對再沸器負荷的過量調節,使捕集率低于設定值;但控制策略B對捕集率設定值的跟隨效果仍優于控制策略A。去除率設定值降至90%后,控制策略A經188.75 min達到穩定,控制策略B將這一過程縮短為79.5 min。

圖12 2種控制策略的捕集率設定值跟隨Fig.12 Responses of set value of capture rate with both control strategies
5 捕集系統性能分析對比
為評估外界持續擾動對2種控制策略下捕集系統性能的影響,對比傳統穩態模擬與動態仿真的區別。從實際生物質熱電廠煙氣數據中隨機選擇連續12 h煙氣變化為輸入,分別進行穩態模擬和動態仿真。實際生物質熱電廠煙氣變化如圖13所示。由于12 h內CO2濃度基本不變,因此假設CO2體積分數恒定(14.9%),同時將煙氣流量等比例縮放至模型適用范圍。以12 h內捕集率波動、CO2捕集總量(kg)和平均單位能耗(kJ/kg,以CO2計)為性能參數,將穩態模擬與動態仿真結果進行對比,并對2種控制策略的捕集系統性能進行評估。穩態模擬不考慮煙氣變化擾動,以12 h內煙氣流量平均值為恒定輸入。各性能參數定義見式(11)、(12):
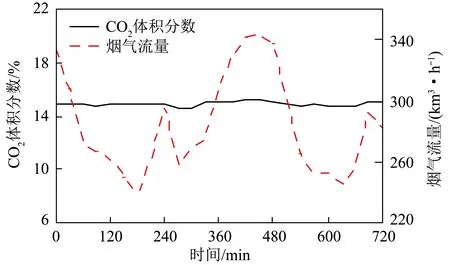
圖13 實際生物質熱電廠12 h內煙氣變化Fig.13 Changes of flue gas from actual biomass thermal power plant within 12 hours
(11)
(12)
式中,mTC(CO2)為CO2捕集總量,kg;CC(t)為t時刻的CO2捕集率,%;mfg(t,CO2)為t時刻煙氣中CO2流量,kg/s;τ為采樣間隔,s;Ep為平均單位能耗,kJ/kg;Qreb(t)為t時刻再沸器負荷,kW。
由于穩態模擬不考慮煙氣波動,穩態模擬的各項結果均為常量。對于動態仿真,煙氣流量變化時,溶液在吸收塔內吸收的CO2隨之變化,溶液再生所需能耗改變。12 h內再沸器負荷的變化如圖14所示,可知2種策略的再沸器負荷與煙氣流量變化趨勢相同,在穩態模擬結果的79.8%~130.3%變化。說明穩態模擬與動態仿真具有差異性,動態仿真能更準確反映外界擾動對BE-MEA的影響,對有關流程的集成具有參考意義。此外,控制策略A調節時間過長導致其對再沸器負荷的調節存在明顯滯后。控制策略B通過前饋補償有效改善了滯后現象。
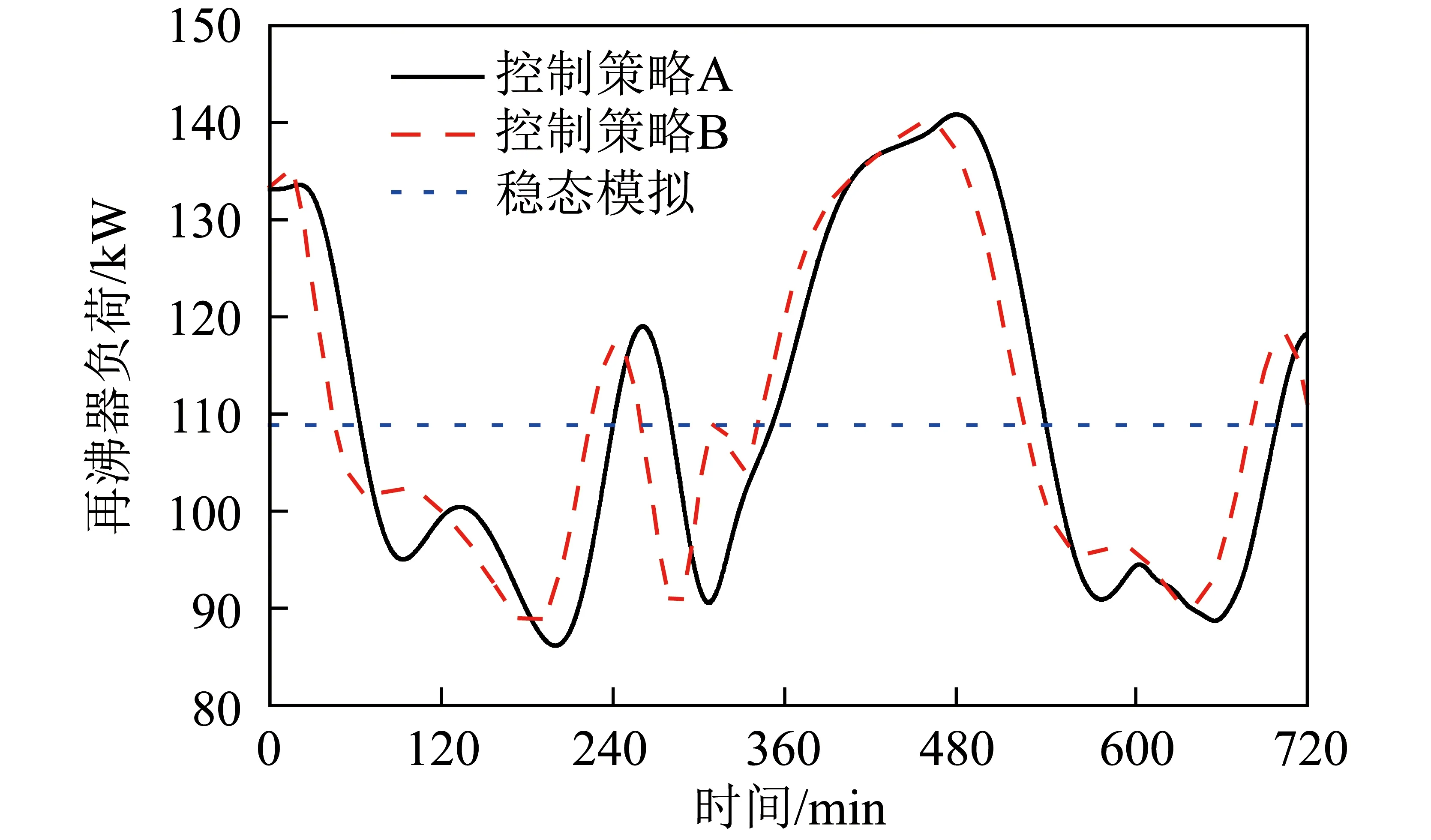
圖14 12 h內再沸器負荷的變化Fig.14 Responses of reboiler duty within 12 hours
由于溶液再生所需熱量隨煙氣流量的變化而改變,因此及時、準確調節再沸器負荷能減少再沸器溫度波動(圖15(a))。控制策略A的再沸器溫度在385.3~386.5 K,與煙氣流量變化趨勢相反且波動劇烈。控制策略B將再沸器溫度波動控制在385.8~386.0 K。穩態模擬的再沸器溫度恒定在385.9 K。再沸器溫度變化說明捕集率發生變化,控制策略A的再沸器溫度波動導致捕集率在77%~120%以相同趨勢劇烈變化(圖15(b))。再沸器溫度波動僅為0.2 K的控制策略B將捕集率穩定在93%~99%。不同于捕集率持續波動且偏離設定值的動態仿真,穩態模擬的捕集率恒定在96%,進一步說明考慮外界擾動的必要性。
捕集單位質量CO2所需能耗(單位能耗)由3部分組成:用于CO2解吸的反應熱、水的汽化熱及用于富液升溫的顯熱,三者分別與富液負載、解吸塔冷凝器溫度和富液流量有關[31]。本文所用模型的冷凝器溫度恒定,且模擬過程中富液負載變化很小,因此單位能耗由富液流量主導。富液流量與煙氣狀態、貧液負載有關,貧液負載由再沸器溫度決定。因此2種控制策略的單位能耗(以CO2計算)變化受煙氣流量和再沸器溫度共同影響,結果如圖16所示。雖然控制策略A的單位能耗變化整體趨勢與煙氣流量大體一致,但其再沸器溫度波動過于劇烈,導致局部范圍內的單位能耗呈現與再沸器溫度變化趨勢相反的大幅震蕩。對于控制策略B,再沸器溫度波動并不明顯,單位能耗與煙氣流量變化趨勢相同。而穩態模擬由于煙氣流量恒定,單位能耗并未變化。
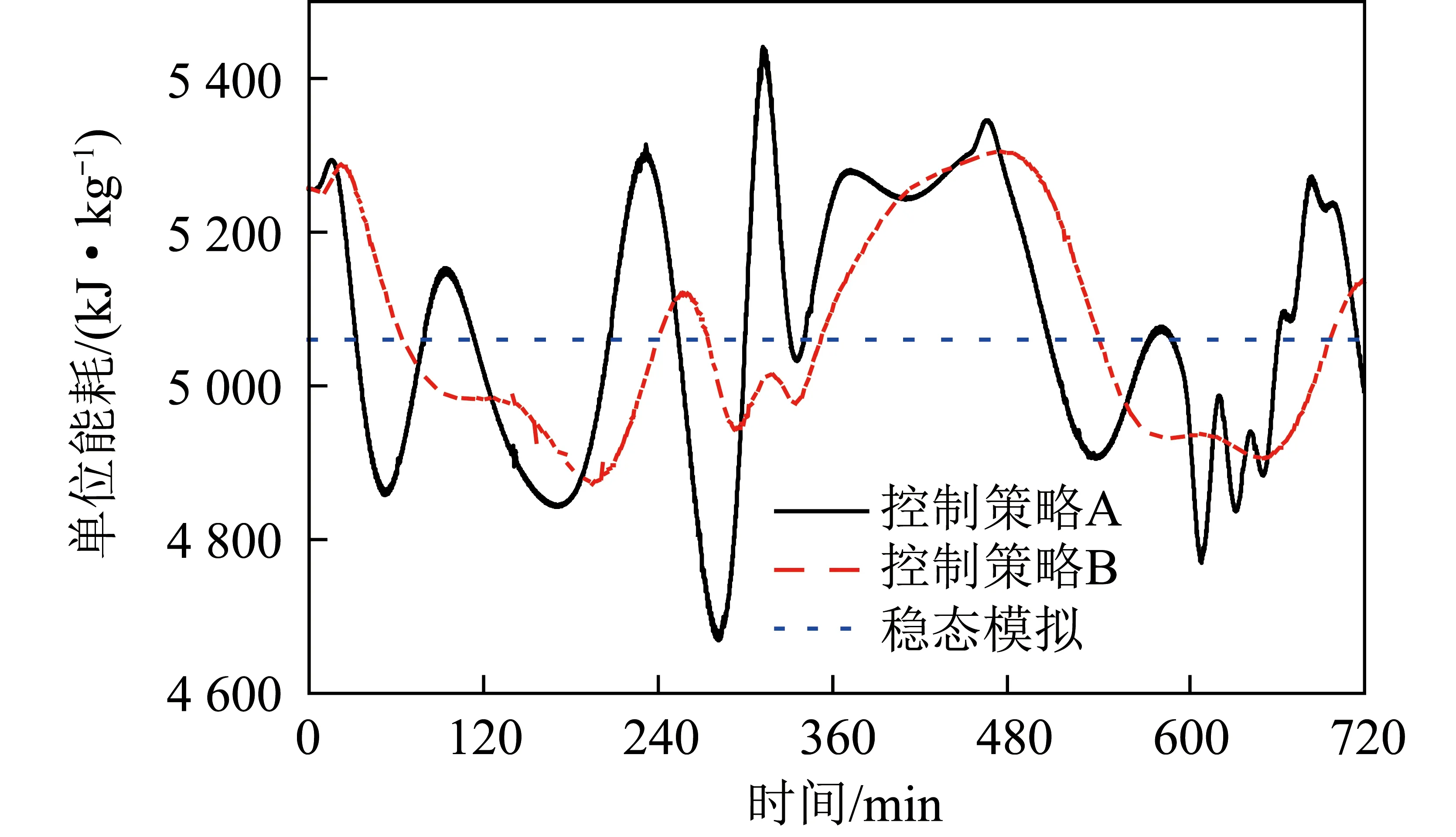
圖16 12 h內單位能耗變化Fig.16 Responses of energy penalty within 12 hours
穩態模擬和動態仿真的區別及2種控制策略的系統性能見表6。由于MEA-CC系統的非線性,在12 h捕集過程中,動態仿真捕集率變化比穩態模擬更復雜,且CO2捕集總量更多以及平均單位能耗更高。相較于控制策略A,控制策略B抑制了捕集率波動,在控制策略A的基礎上將CO2捕集總量提高0.35%,平均單位能耗降低了0.14%。
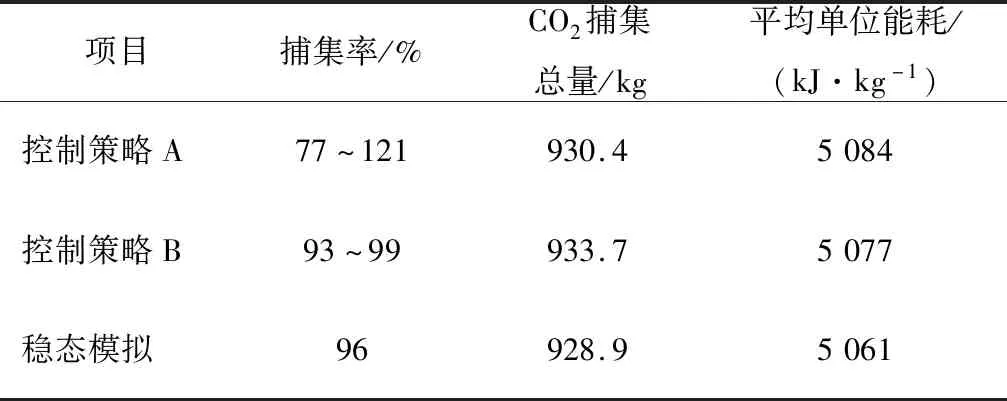
表6 12 h內系統性能參數Table 6 System performances within 12 hours
在生物質熱電廠和BE-MEA實際集成中,為應對上游電廠運行工況變化對捕集系統的擾動,實現捕集系統的靈活操作,需根據系統動態運行特性,結合控制目標為捕集系統設計合適的控制策略。本文基于傳統再沸器負荷調節的反饋控制(控制策略A),提出了改進控制策略(控制策略B)。通過實時監測富液流量,將前饋補償與反饋控制相結合,有效縮短了再沸器負荷調節的響應時間;提升了控制性能、靈活操作性能和系統性能。
控制策略是否適用取決于電廠煙氣(流量和成分)波動及捕集技術。作為生物質利用重要手段,燃煤摻燒生物質電廠與碳捕集系統的集成備受關注。為避免鍋爐中形成灰燼團塊,不改造鍋爐的情況下,現代燃煤電廠中生物質質量比建議在10%~20%[18,31],使燃煤摻燒生物質電廠的煙氣流量和煙氣中CO2濃度介于燃煤電廠和生物質電廠之間[18,32]。鑒于此,雖然本文針對生物質熱電廠碳捕集進行了控制策略評估和改進,但同樣可對燃煤摻燒生物質電廠基于MEA的化學吸收碳捕集提供參考。
6 結 論
1)面對生物質熱電廠煙氣流量階躍變化時,控制策略A的調節時間長達71 min,再沸器溫度偏差較大;控制策略B將調節時間縮短至17 min,縮短了76%,基本實現再沸器溫度恒定,控制性能更優。
2)捕集率設定值變化時,控制策略A對捕集率設定值的跟隨能力較差,188.75 min重新達到穩定;控制策略B在79.5 min內到達穩定,靈活操作性能更佳。
3)面對外界持續擾動時,相較于傳統穩態模擬,動態仿真能更真實反映煙氣變化對BE-MEA的影響。同時,控制策略A無法將捕集率維持在目標水平上,捕集率在77%~121%劇烈波動;控制策略B將捕集率波動抑制在93%~96%,以更低的單位能耗捕集更多的CO2。
4)雖然控制策略B的前饋補償能有效提升捕集系統的抗干擾能力,但由于胺基捕集系統的非線性和強耦合性,控制策略B對CO2捕集量和能耗提升并不顯著。因此,建議控制策略研究應更全面考慮系統的非線性,合理解耦系統參數,提升捕集系統抗干擾性的同時,關注CO2捕集量和能耗。
猜你喜歡
化工管理(2022年13期)2022-12-02 09:21:52
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
山東冶金(2019年2期)2019-05-11 09:12:16
測控技術(2018年2期)2018-12-09 09:00:52
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
當代化工研究(2016年9期)2016-03-20 16:22:15
中國資源綜合利用(2016年2期)2016-01-22 07:27:41
